
Abstract
This paper presents a novel robust control design for a class of home pension service mobile robots (HPSMRs) with non-holonomic passive constraints, based on the Udwadia-Kalaba theory and Udwadia control. The approach has two portions: dynamics modeling and robust control design. The Udwadia-Kalaba theory is employed to deal with the non-holonomic passive constraints. The frame of the Udwadia control is employed to design the robust control to tracking the servo constraints. The designed approach is easy to implement because the analytical solution of the control force can explicitly be obtained even if the non-holonomic passive constraints exists. The uniform boundedness and uniform ultimate boundedness are demonstrated by the theoretical analysis. The effectiveness of the proposed approach is verified through the numerical simulation by a HPSMR.
Keywords
Introduction
Data from the World Health Organization shows that the number of elderly people around the world is steadily increasing and it is expected to reach 2 billion elderly population by 2050. 1 In order to improve the quality of the life of elderly people and their ability of independent living, robotic solutions centered around human-centered and home-oriented have been greatly developed in the past decade.2–5 Therefore, home pension service mobile robots (HPSMRs) have been attended extensively. The HPSMRs can be regarded as a special kind of mobile robots serving human beings, which can carry out home service work for older adults.
In general, constraints acting on mechanical systems have many classification methods. If we focus on the way in which the constraint force arises, it can be divided into two categories: the passive one and servo one. 6 The passive one shows more about the inherent characteristics of the system itself and the relationship between the systems and environment. Thus, the corresponding constraint force is generated by the system structure or environment. The servo one reflects more about the control requirements that the system needs to meet. Thus, the corresponding constraint force is provided by the servo control. For controlling mobile robots, some excellent methods have been reported in the literature.7–16 However, most of the methods mentioned above can not be applied in a straightforward manner to mechanical systems with non-holonomic passive constraints, or whose analysis and computation do not entirely take into account the complex nonlinear effects of the dynamical model of mobile robots.
As other mobile robots,17–19 the HPSMRs also include the non-holonomic passive constraints in their moving process. For example, a HPSMR with a non-holonomic passive constraint in a home is shown in Figure 1. When the HPSMR moves along a desired trajectory, it cannot move axially. Therefore, there exists a non-holonomic passive constraint on the axial direction of the HPSMR. The non-holonomic passive constraint20–24 contains a differential element which cannot be transformed into geometric constraint by integration, which makes HPSMRs’ dynamics modeling and control design difficult by the Lagrange multiplier method.

A home pension service mobile robot in home.
Udwadia and Kalaba devoted to research the motion of the constrained mechanical systems and they developed a novel theory to deal with the motion in 1992, 25 which is praised as the Udwadia-Kalaba theory at present. In the Udwadia-Kalaba theory, the constraint is studied in the passive category that can be ideal, non-ideal, holonomic, and non-holonomic. In dynamics modeling, the theory presents an explicit, general equations of motion for passive constrained, discrete dynamical systems in terms of the generalized coordinates that describe their configurations.26–29 In 2003, when the constraint was related to the servo category, the Udwadia control 30 arose at the historic moment, which is a novel tracking control method for non-linear mechanical systems from a new perspective in which the prescribed tracking trajectories are viewed as the servo constraints that are imposed on these systems. The applications of the Udwadia control was extensively reported in recent years.31–36 However, Udwadia control does not consider any uncertainty that is inevitable in the actual mechanical systems. Motivated by these reasons, a robust control is designed based on the frame of the Udwadia control in this paper.
This paper is focused on the dynamics modeling and robust trajectory tracking control for HPSMRs. From the perspective of inverse dynamics, the main contributions of this paper are threefold. First, the Udwadia-Kalaba theory is employed to address the dynamics modeling when the non-holonomic passive constraints are involved. Second, taking the system uncertainty into consideration, a novel robust control is designed based on the frame of the Udwadia control to drive the systems to tracking the pre-specified servo constraints approximately. Third, the uniform boundedness and uniform ultimate boundedness of the controlled system are verified.
The remainder of this paper is outlined as follows. In Section 2, a class of HPSMRs is described, including the formulations of dynamic equation, passive constraints and servo constraints. In Section 3, a robust control is designed for HPSMRs. In Section 4, the effectiveness of the proposed approach for the HPSMRs is shown by a numerical experiment in Matlab, followed by the conclusion in Section 5.
System description
The motion equation of a class of constrained HPSMRs can be obtained by relation

Here,
For each

and

Next, combine first derivative of holonomic passive constraints with respect to

where
Differentiating holonomic passive constraints twice and non-holonomic passive constraints twice with respect to

where
Remark 1. The passive constraints (4) and (5) have to meet strictly in the whole process of the systems’ moving regardless of the initial condition and the uncertainty.
Now, the passive constraint force

Here, “+” stands for the Moore-Penrose generalized inverse. 37
Remark 2. There is no elimination or transformation of coordinates when the holonomic passive constraints are presented in the Udwadia-Kalaba theory, which leads to a simple and new fundamental view of Lagrangian mechanics. The coordinates describing the unconstrained systems are same as those describing the constrained systems, which is responsible for the simplicity of the explicit equations and the fundamental insights about the nature of the constrained motion. By the Udwadia-Kalaba theory, the explicit and general motion equations for a constrained HPSMR system can be established in following three steps. Firstly, in terms of the generalized coordinates, the equation of the unconstrained dynamical system of the HPSMR can be acquired by using Lagrangian or Newtonian mechanics. Second, the passive constraint equations are formed, which maybe include the holonomic and non-holonomic. In the end, the passive constraint forces are imposed on the HPSMR system, namely, the passive constraint forces resulted from the presence of passive constraints are added to the unconstrained HPSMR system’s force.
By similar reasoning, we can get first-order and second-order servo constraints and put them in the matrix form as follows

where

where
Remark 3. The constraints in engineering can be classified into categories, namely passive ones and servo ones, according to the constraint forces provided by different subjects. In the passive constraint problem, the focus is to let the environment include the structure of the mechanical system to generate the required constraint forces. In the servo constraint problem, which is a control problem in reality, the focus is to let a mechanical system, equipped with servo controls follow a set of constraints by generating the required constraint forces through servo controls. The passive constraints (4) and (5) will be met spontaneously by the natural environment, but regarding the servo constraints (7) and (8), an appropriate servo constraint force shall be offered to make this type constraints satisfied. The servo constraints (7) and (8) are not like the passive constraints (4) and (5) that have to be strictly met. The servo constraints only need to be approximately followed, because the strict control requirement is not needed for people in real life. Moreover, with the uncertainty in presence and no restrictions on the initial condition, it is only reasonable to expect approximate constraint following. Without considering the model uncertainties and initial conditions, Udwadia 30 creatively designed a servo constraint force by analytical form. In Udwadia control, the holonomic and non-holonomic servo constraints will be treated equivalently, thus it has a great potential in addressing the stability or trajectory following control problem because these issues can be converted to control problems.
Remark 4. A constrained HPSMR could be described by (1), which is a second-order motion equation. A HPSMR is equipped with passive constraint force follow a set of passive constraints (4) and (5), and the the passive constraint force can be obtained by using Theorem 1, which is a modeling problem. Then, the HPSMR constrained by passive constraints follows a set of servo constraints (7) and (8), which becomes a control problem in reality. The servo constraint problem can now be stated as follows: Determine the servo control
Robust control design
Before designing the control



Here,

Remark 5. If there is no uncertainty in

There exists a scalar constant

Remark 6. Under Assumption 1,
Now consider the approximate servo constraint following problem. That is, it is possible that

with



where





Remark 7. The proposed robust control is designed as three portions:
Uniform boundedness: For any
Uniform ultimate boundedness: For any

Now, we prove the stability of the HPSMR systems with the proposed control. For a given uncertainty

By (16), we have

Based on (23), we have

By (17), we get

By

As

As

With (26) to (31), we have, for all

and for all

Finally, we have

By Rayleigh’s principle 41 and Assumption 3

Therefore,

Upon invoking the standard arguments as in Chen 39 and Khalil, 40 we conclude uniform boundedness with


Furthermore, uniform ultimate boundedness also follows with


The uniform ultimate boundedness ball size
Numerical experiment
To verify the proposed approach above mentioned, a HPSMR with a non-holonomic constraint shown in Figure 2 is carried out. Its two rear wheels are the driving wheels. The configuration of the HPSMR can be represented by the triplet

A home pension service mobile robot.
The symbol definition of the home pension service mobile robot variables and parameters.

Based on the Newtonian mechanics, the unconstrained HPSMR’s motion equation can be obtained easily as

Then, considering the passive constraint, servo constraints and uncertainty, the system can be described as

where

The non-holonomic passive constraint of the HPSMR is given as follows

Differentiating (43) with respect to

in the matrix form as

where

By using Theorem 1, we can get the passive constraint force of the HPSMR as

To perform the approximate trajectory tracking control of the HPSMR based on the designed robust control, we assume the pre-given servo constraints as follows

Differentiating (47) once with respect to

and differentiating (47) twice with respect to

Equations (48) and (49) can be rewritten in the form of (7) and (8), then we can get

By theorem 2, the analytical solution of servo control force based on the servo constraints (47) and (49) can be given as
Finally, the control input can be given as

The solution of the numerical simulation can be obtained through

The motion of the mass center of the HPSMR on

The motion of the mass center of the HPSMR on
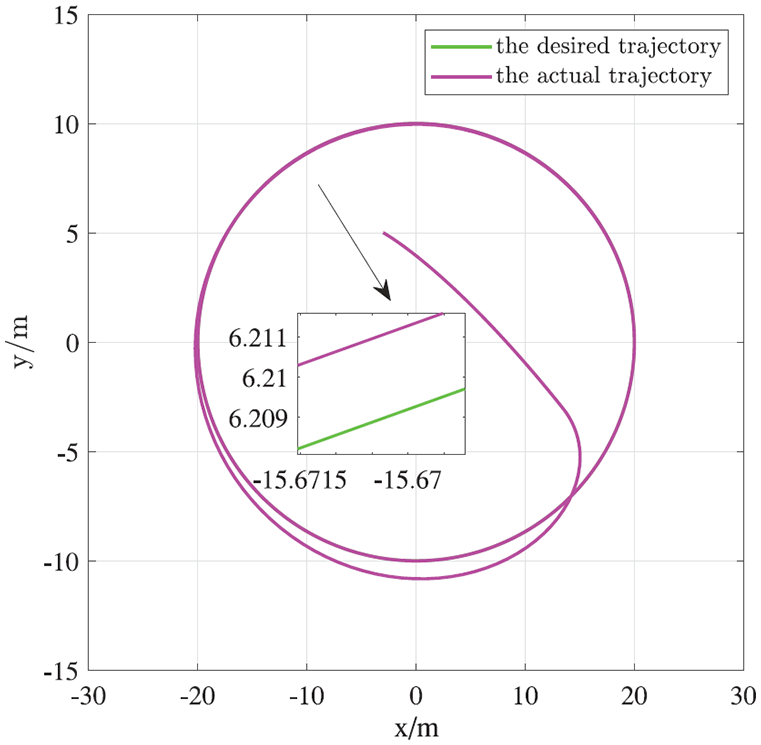
The actual trajectory and the desired trajectory of the HPSMR on

The error of HPSMR in the

The error of HPSMR in the

The driving torque

The driving torque
Conclusion
A novel approach is proposed based on the frame of Udwadia’s and Kalaba’s methods for HPSMRs. This approach has two hierarchies: dynamics modeling and robust control design. The hierarchy of dynamics modeling is based on the Udwadia-Kalaba theory to address the problem of the non-holonomic constraint existing in the HPSMRs. The hierarchy of robust control design is based on the frame of the Udwadia control to solve the problem of HPSMRs’ approximate trajectory tracking control with uncertainty. The robust control guarantees the uniform boundedness and uniform ultimate boundedness of the controlled HPSMRs, which is analyzed by using Lyapunov method. The effectiveness of the proposed control is shown by a numerical experiment, and which shows that the errors are stable at the least in the order
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the University Synergy Innovation Program of Anhui Province (GXXT-2019-031)