
Abstract
This article investigates sliding mode control for a class of continuous-time switched systems with signal quantization, actuator nonlinearity and persistent dwell-time switching that can guarantee the globally uniformly asymptotical stability of the closed-loop system. First, a sliding surface is devised for the switched system and sufficient conditions are proposed to ensure the globally uniformly asymptotical stability of the sliding motion equation by utilizing multiple Lyapunov function technique. Second, the sliding mode control laws, based on the parameters of quantizer, actuator nonlinearity and disturbance, are devised to stabilize the closed-loop systems. Moreover, sufficient conditions are given to guarantee the devised sliding surface’s reachability. Finally, the superiority and effectiveness of developed results is illustrated via a numerical simulation.
Keywords
Introduction
The past decades have witnessed a great advance in studies of switched systems which are widely applied in robot systems, 1 networked systems, 2 chemical process 3 and so on. Switched systems, which comprised multiple subsystems and a signal deciding to activate one of them, can effectively model processes or multiple-mode systems. Moreover, the idea of controller switching is carried over to many intelligent control strategies in order to make up for the shortage of single controller.
For the switched system, the design of the switching signal yields a direct impact on system stability. Basic stability analysis for switched systems with various switching signals such as stochastic switching or average dwell-time (ADT) has been broadly addressed.4–8 ADT switching implies bounded switching times within bounded period, which suggests that there exists a lower bound for the average time between switchings. However, persistent dwell-time (PDT) switching is a class of switching signal consisting of infinitely many dispersed intervals in which the subsystem mode remains stationary. In the intermissions of such intervals, the subsystem mode can randomly switch. Compared with ADT switching, PDT switching, as a more general switching signal, 9 has no limit of switching times. Although PDT switching is more complicated, it is essential to study the control problem under PDT switching.
Based on stability analysis for switched systems, diverse control methods have been studied including H∞ control, sliding mode control (SMC) and fuzzy control. Comparing with other control methods, the advantage of SMC method is to eliminate so-called matched plant parameters and external disturbances with insensitivity property. The SMC method offers a sliding surface for system trajectories to approach by utilizing intermittent control input such that the system can have required attributes, such as disturbance rejection capability, tolerance ability and stability.10–14 Since it is difficult to analyse the stability of the switched systems by constructing different sliding surfaces for each subsystem through the idea of common SMC method, numerous efforts about constructing sliding surface for switched systems have been devoted in existing literature.15–21 In these results, a nonswitched sliding surface with weighted parameter has been studied for the switched systems. However, most existing SMC methods in switched systems are considered under the condition of stochastic switching or ADT switching. Due to the complexity of PDT switching, the problem for SMC methods in switched systems with PDT switching remains open until now.
On another research forefront, the network technology has been widely used in modern engineering applications due to the superiority in remote operation capability and high installation flexibility. One distinctive feature of network technology is that signal transmission among components extremely depends on the performance of communication networks. However, the applicability of communication network can be affected by signal quantization.22–24 Different from the accurate used in conventional sliding mode controller, quantization error which caused by signal quantization may prevent the state trajectories of system from arriving on the pre-defined sliding surface, while it may make the closed-loop systems unstable if the quantization errors cannot be compensated. Hence, it is essential to solve this problem by studying the quantized SMC approach.
Motivated by the above discussions, this article is concerned with the quantized SMC design for a class of continuous-time switched systems with PDT switching and actuator nonlinearities. The contribution of this article is twofold: (1) the improved logarithmic quantizer is applied to SMC approach instead of the traditional logarithmic quantizer to reduce the restriction of quantization density; (ii) the SMC laws for switched systems with signal quantization are developed to compensate the quantization effect.
Problem formulation and preliminaries
Consider the following switched system with actuator nonlinearities and bounded disturbance

where

where

Some definitions should be introduced before proceeding further.
Definition 1
Consider the switching instants
Remark 1
According to the above definition, a PDT switching signal is composed of infinitely many consecutive switching stages. Each stage includes a period with length at least
Remark 2
Some notations for PDT switching signal should be introduced for the sake of conciseness. As shown in Figure 1,

Illustration of PDT.
Some notations for PDT switching signal should be introduced for the sake of conciseness. Let
Definition 2
The switched system (equation (1)) is globally uniformly asymptotically stable (GUAS) under certain switching signals

As a consequence, the main objective of this article is to determine a set of laws based on SMC approach such that the closed-loop system (equation (1)) is GUAS under quantized signal.
Main results
Sliding surface design and stability analysis
First, a sliding surface is devised and the stability criterion for sliding motion with PDT switching is presented, upon which the parameter matrix of SMC law is obtained. The integral-type sliding surface is considered as follows

where
Remark 3
Note that the proposed sliding surface associated with the system mode will not be switched with the change of system mode, due to the fact that only the integral part of the mode surface depends on the system mode in this article. Considering the continuity of the sliding function at the switching instant

According to continuity definition, one can conclude the continuity of the sliding function.
The derivative of sliding surface (equation (4)) is derived that

So as to make the trajectories of the switched system state to approach the sliding hyperplane, we acquire

Substituting equation (6) into equation (1) yields the sliding motion equation

The following lemmas present the stability criterion for continuous-time switched system and the sufficient condition for the GUAS for the sliding motion equation (7), respectively.
Lemma 1
Consider the sliding motion equation (7), and



Then, the sliding motion equation (7) is GUAS and PDT switching signal satisfies

Proof
Suppose that

From equation (12), it follows that

Combining equations (13) and (8), one can obtain that

Therefore, if the PDT switching signal satisfies (equation (11)), it can be derived that
Lemma 2
Consider the sliding motion equation (7), and


Then, the sliding motion equation (7) is GUAS and PDT switching signal satisfies (equation (11)). Moreover, if equations (15) and (16) have a solution, the parameter matrix can be given by

Proof
Consider the following Lyapunov functions

From equation (15), we can have

After equivalence transformation, one can conclude

From equation (20), one can conclude that equation (9) holds. Similarly, equation (10) can be derived from equation (16). The proof is completed.
Remark 4
Distinguished from the gain matrix
SMC with improved logarithmic quantizer
In order to mitigate network congestion brought by limited communication network capacity, the signal has to be quantized before transmission. As a sketch of networked system layout is shown in Figure 2, system state
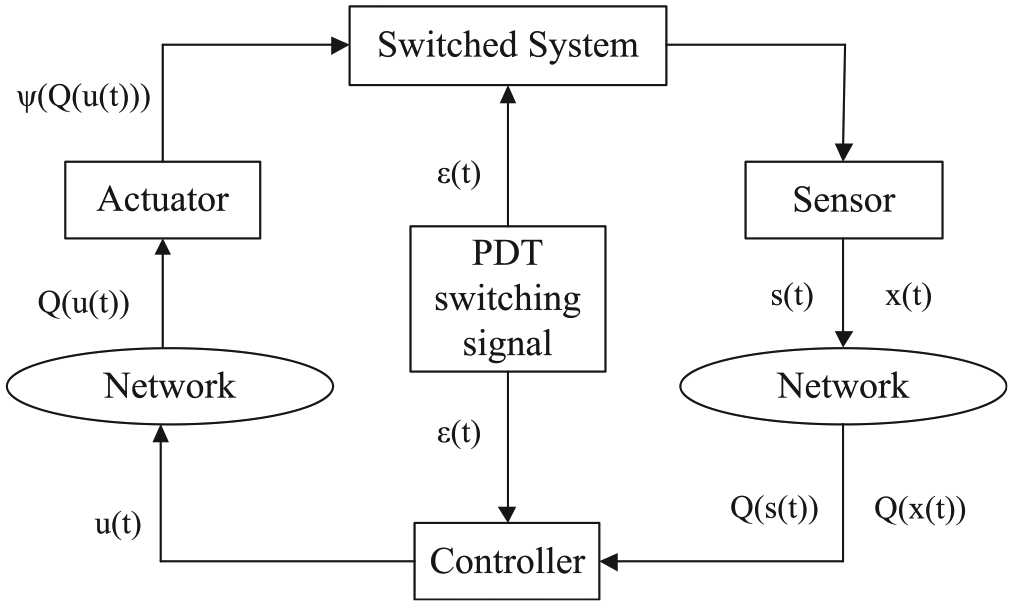
The quantized networked control system.
We are interested in a class of improved logarithmic quantized signals with following form:

where

where

The bound of quantization error is

and define


The quantization errors


Remark 5
It is noted that the logarithmic quantizer and quantization error constraints distinguish from the ones in Chen et al.
29
To be specific, the length of quantization level in improved logarithmic quantizer is different from traditional logarithmic quantizer, that is,
For the convenience of later discussion, another form of quantization error constraints is given


where

Similarly, equation (29) can be derived from equation (27).
The above results about the quantization errors
Theorem 1
Considering the switched system (equation (7)) and the sliding surface (equation (4)), construct the SMC law

where

Proof
Considering the Lyapunov function

From the definition of quantization errors

The related terms of equation (34) can be enlarged

and

where

Considering another term of equation (34), one can obtain that

and

where

Combining equations (38), (39) and (40), it follows that

Therefore, from equations (37) and (41), one can obtain that

To further simplify the related items in equation (42), the following proof is discussed in three cases:
Case 1.

Case 2.
Case 3.

Therefore, equation (42) is simplified

Considering equation (46), if equation (47) holds, that is,
where
Then, we will further prove that equation (47) holds in three cases.
Case 1.

Case 2.

Case 3.

According to the above discussion of three cases, it follows that

from which one can conclude that equation (47) holds. The proof is completed. Therefore, the trajectory x(t) can reach the sliding surface (equation (4)).
Remark 6
Referring to the discussion on the finite-time reachability,
30
the trajectory can reach the sliding surface in finite time, if

where

Due to the fact

where
Numerical example
A numerical example is provided to illustrate the effectiveness of the proposed result. Consider switched system (equation (1)) given by

and initial state
The related items of nonlinearity input (equation (2)) and the exogenous disturbance

where

where we can calculate that
Assigning associated parameters

Therefore, the SMC law

and

Compared with Figure 3 in which the uncontrolled system state diverges, Figure 4 demonstrates the performance of the closed-loop system via SMC law obtained by Theorem 1. Although there exists slight chattering phenomenon, the state response of the closed-loop system with signal quantization and actuator nonlinearities converges in Figure 4. Therefore, the SMC method for switched systems with signal quantization and actuator nonlinearities can effectively guarantee the closed-loop system is GUAS. The comparisons of
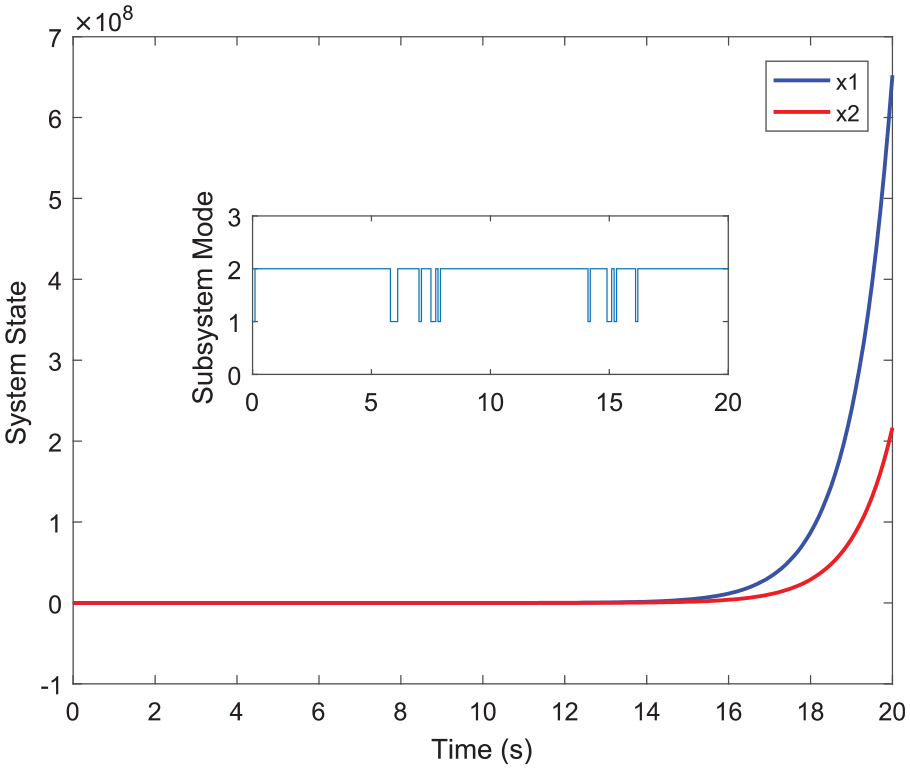
State response of the open-loop system.

State response of the closed-loop system.


The state response


The state response of switched system in different quantization densities is shown in Figure 9. It indicates that there is little difference in chattering phenomenon under the different quantized errors caused by different quantization densities. Figure 9 further strengthens the evidence that the quantization error of

Conclusion
This article investigates the quantized SMC design method for switched systems with signal quantization, actuator nonlinearity and PDT switching. The improved logarithmic quantizer is applied to the signals transmitted in network instead of the traditional logarithmic quantizer to reduce the restriction of quantization density, and based on this quantizer the quantized SMC method is demonstrated to guarantee the globally uniformly asymptotical stability of the closed-loop system. A numerical simulation is given to illustrate the superiority and effectiveness of the developed results. Future work will be applied to practical system, for instance, attitude stability control of variable mass spacecraft to verify developed theoretical result.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.