
Abstract
The key characteristics of the sliding mode control (SMC) are the ability to manage unmodeled dynamics with rapid response and the inherent robustness of parametric differences, making it an appropriate choice for the control of power electronic converters. However, its drawback of changing switching frequency causes critical electro-magnetic compatibility and switching power loss issues. This paper addresses the problem by proposing a dynamic integral sliding mode control for power converters having fixed switching frequency. A special hardware test rig is developed and tested under unregulated 12.5-22.5 V input and 30 V output. The experimental findings indicate excellent controller efficiency under wide range of loads and uncertain input voltage conditions. In addition, the findings indicate that the closed-loop system is robust to sudden differences in load conditions. This technique provides an improvement of
Introduction
Advanced applications such as integration of renewable energy resources with microgrids require robustness and precise voltage control.1–5 In the existence of parametric and internal uncertainties, conventional non-linear control techniques do not provide required robustness.6–8 Therefore, the sliding mode control (SMC) becomes a good candidate for controlling such systems with unknown dynamics and uncertain parameters with external perturbations.9,10 In addition, SMC provides better transient response due to its ability to utilize all the available system gains.
A discontinuous function is the natural way to implement a SMC, but its use is limited by the ideal requirement of infinite switching frequency. A realistic approach has been reported in Sabanovic et al.
11
and Venkataramanan
12
where a hysteresis comparator substitutes the discontinuous
Hence, fixing the switching frequency in SMC is an active research topic in the field of power electronic converters.17,18 Interesting results are reported for phase shifted full-bridge converters, 19 interleaved buck converters 16 , current control of permanent-magnet synchronous machines, 20 cascaded boost converters 21 and AC–DC converters. 22 It is important to mention that SMC in power converters needs to operate at constant frequency as they are made up of reactive components whose correct sizing heavily depends upon the switching rate. A solution to this problem is proposed by the authors in Repecho et al. 23 where a technique for fixing the frequency for hysteresis band SMC is reported.
An adaptive controller for the hysteresis band is proposed in, Qi et al. 15 , Repecho et al. 16 , Yasin et al. 18 and Ortiz-Castrillón et al. 24 where the hysteresis width is adjusted such that the resulting switching frequency remains constant. However, the technique requires optimal knowledge of the plant parameters in order to properly adjust its width. The use of additional sensors for parameter sensing increase the cost and limit its applications. Researchers in Repecho et al. 16 have proposed a fixed-frequency SMC by utilizing an external signal. The involvement of new hardware and the requirement of this technique to work under the constraints that the reciprocal of the switching frequency shall be low enough as compared to the system time constant, are its drawbacks.
To achieve a fixed switching frequency, the technique zero average dynamics (ZAD) is used.25,26 In ZAD, the main objective is to calculate a duty cycle such that the average dynamics of the chosen sliding manifold equals zero. As a result, the steady-state switching time is set to a desired value and the overall average performance is close to the ideal sliding mode. The main drawbacks of ZAD are its complex calculations and requirements of real-time fast processing units.
A method based upon the direct implementation of an ideal equivalent control calculated from the first derivative of the desired switching manifold has been reported bythe authors of Yasin et al.10,27, Li et al. 28 and Tan et al. 29 However, this approach does not directly implement a discontinuous function which may result in reduced robustness and loss of order reduction. Fixed-switching frequency SMC designs are also achieved through pulse-width modulation (PWM) implementation were introduced in Abrishamifar et al. 30 and Ye et al. 31 In this method, the control law is straightened into a limiting layer to reduce the chattering effects at the cost of reduced robustness of SMC.
The constant switching frequency in SMC has been reported in Huerta et al. 32 , Vidal-Idiarte et al. 33 and Yan et al. 34 using an extra proportional–integral (PI) control loop that controls the width of the hysteresis. In this technique, the designer should ensure that the dynamics of this additional PI loop must be slow enough in order to avoid interference with current and voltage control loops. Drawbacks of this scheme are the additional control loop and the complex calculations.
In this research a novel dynamic integral sliding mode controller is proposed for power electronic converters, which is capable to counter parameter uncertainties and external disturbances. An integral sliding manifold is proposed such that the reaching phase of SMC is eliminated and the effect of both matched and unmatched uncertainties is significantly reduced thereby increasing the robustness of the system. The control signal provided by this technique is continuous in nature and PWM of this signal yields a fixed frequency sequence for the electronic switch. Moreover, this manuscript sheds light on various other fixed-frequency SMC techniques, briefly comparing their methodology and categorization. The comparison of the techniques is based upon their number of sensors, robustness, cost, conversion speed and implementation complexity.
The rest of the paper has the following arrangements: The description of the system and its mathematical model is explained in the section ‘System description and modelling’ and the controller design is presented in the section ‘Dynamic integral sliding mode controller design’. The experimental findings are discussed in the section ‘Hardware results’. The comparison of different fixed-frequency SMC techniques is discussed in the section ‘Comparison of fixed-frequency SMC techniques’ while the article is concluded in the section ‘Conclusion’.
System description and modelling
Figure 1 shows a conventional boost converter circuit framework in which



Block diagram of the proposed technique.
In order to simplify mathematical analysis, replace

Dynamic integral sliding mode controller design
In this section, the design procedure for the dynamic integral sliding mode controller (DISMC) for the boost converter is discussed. This hybrid controller combines the properties of both dynamic and integral SMC algorithms. It provides a smooth control signal along with the advantage of eliminating the reaching phase, which increases the robustness of the closed-loop system. The output of the controller is a continuous signal which is pulse width modulated to achieve fixed-frequency DISMC. The control input to achieve the required performance and robustness has two parts

Design of continuous part
The continuous part







Design of discontinuous part
Taking the first derivative of (8) we get





Existence of the sliding mode
The existence of the sliding mode can be proved by considering the following Lyapunov functional:





Hardware results
The results presented here are based on a boost converter parameters presented in Table 1 having filter capacitance of
The switching sequence is provided by the FPGA-based system that controls the current of the inductor. The system is operated at 32 kHz switching frequency. The output voltages are first transformed to lower voltages (100:1) by a series resistive network since the nominal voltages for analogue to digital converter (ADC) channel of FPGA (CPG 236) is 1 V. A voltage buffer is used to feed these reduce voltages to the ADC channel. Inductor current is fed to FPGA in the similar manner except that the conversion ratio used is (1:1). After taking 10 samples the average is calculated for the error computations. Each average is computed at the end of 20
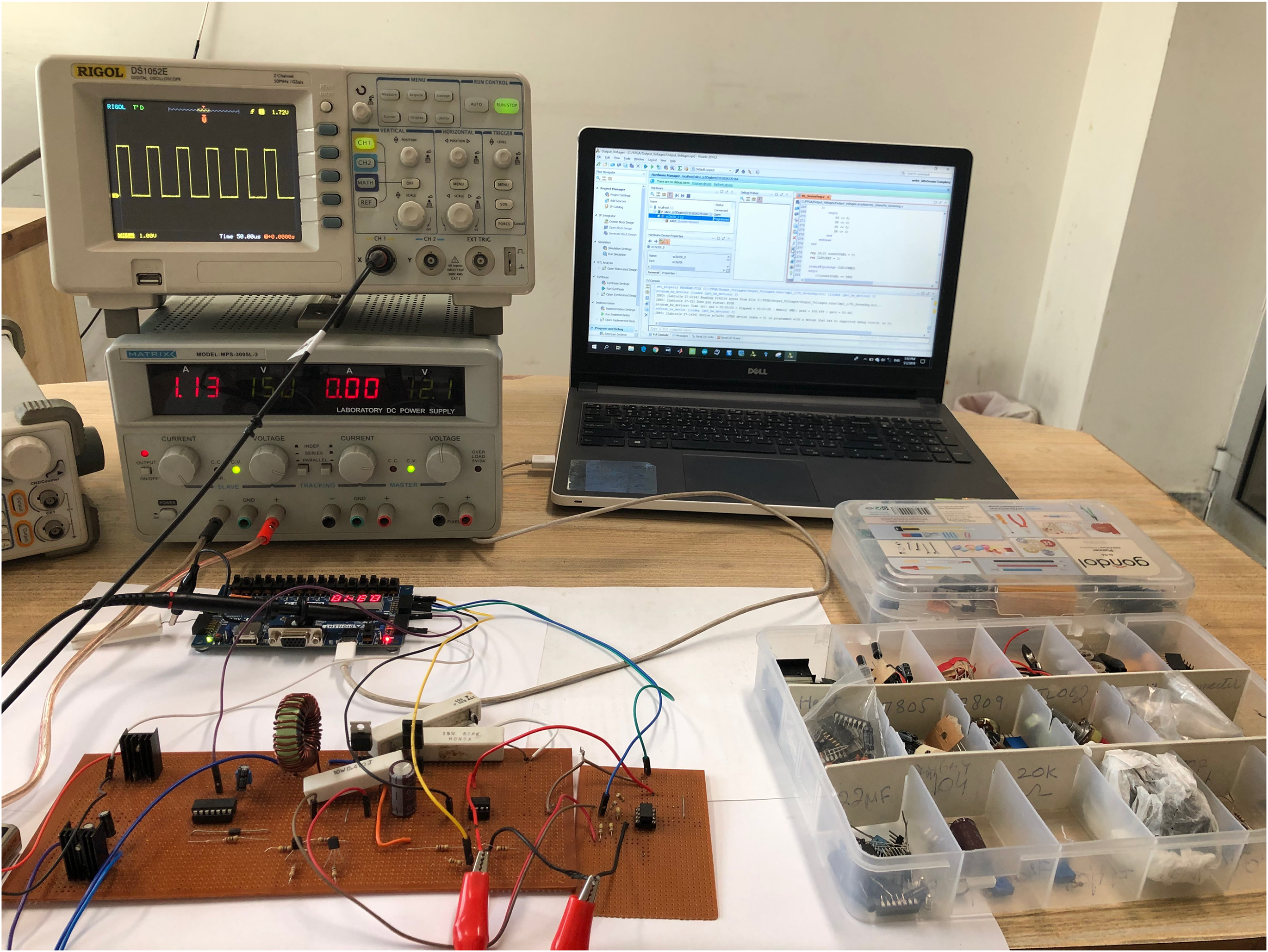
Experimental setup to evaluate the performance of the controllers.
Boost converter parameters.

Step response and steady-state error
The performance of the controller is tested under different load conditions. The input voltage of the converter is switched to 400 MHz to get the step response of the system. A PNP power transistor, TIP147, connects and disconnects Vin according to a 400 MHz square wave to perform the switching action. The complete response of closed-loop system is shown in Figure 3. For different load conditions (

Dynamic integral sliding mode controller (DISMC) simulations and experiments for the closed loop system are presented. (a) Simulated step response of the system. (b) Experimental step response of the system. (c) Simulated inductor current during start up. (d) Experimental inductor current during start up.
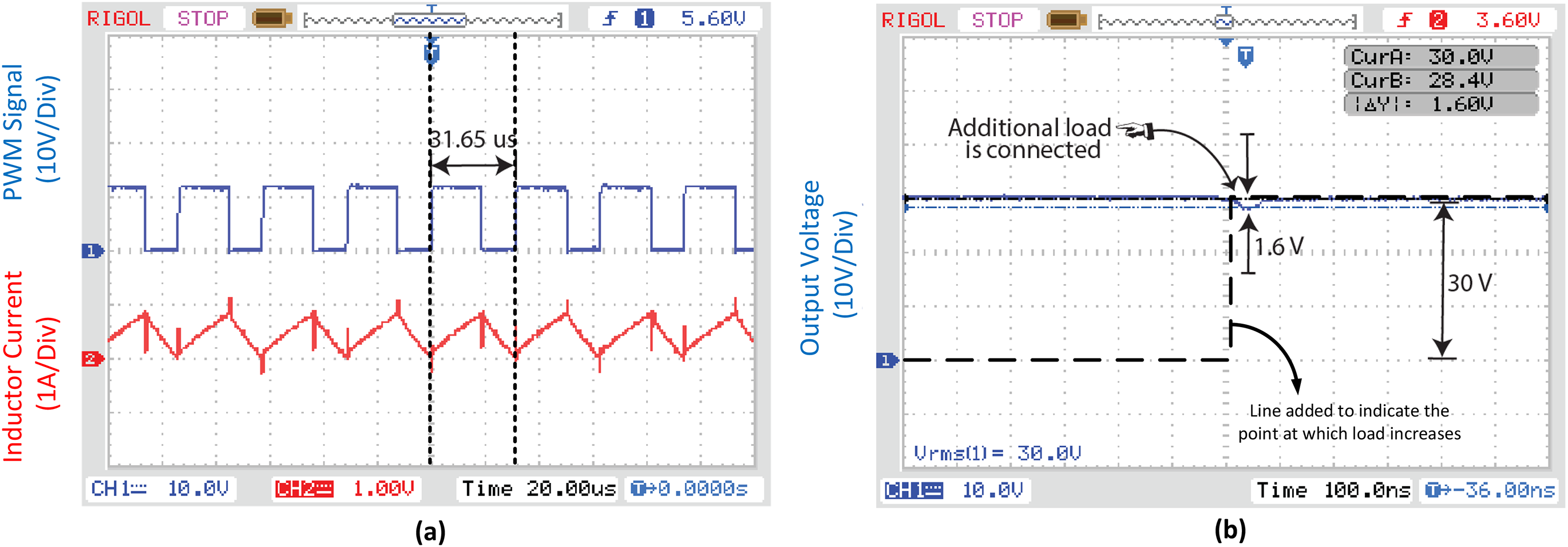
Experimental results for close-loop system with Dynamic integral sliding mode controller (DISMC). (a) Gating signal with inductor current. (b) Response of the system when additional load is connected.
Robustness
In order to verify the robustness of the controller, and to note its behavior under changing load conditions, a setup is designed to change the load resistance from
Output voltages for input variation.

Comparison of fixed-frequency SMC techniques
With the number of techniques to fix the frequency in SMC, it may not be trivial for a researcher to choose between these techniques. Therefore, to help the reader a comparison between the proposed and the existing techniques is presented in this section based upon the following highlighted aspects.
Implementation
The simplicity to implement a certain technique is a key factor in deciding which fixed frequency technique shall be used for a particular application. However, the ease of implementation directly depends upon the knowledge of the users and their relative experience. In literature both analogue (using operational amplifiers) and digital (involving micro-controllers and microprocessors) techniques are encountered for the implementation of fixed-frequency SMC techniques.
Sensors
The number and type of sensors required for a particular technique is also an important factor that effects the selection process. Generally, it is easy and cost effective to measure voltage as compared to current, because for large current applications (>10 A), the sensors become bulky and expensive. It shall be noted that due to the non-minimum phase nature of boost converters, the voltage regulation problem has to be addressed in terms of cascade control. Therefore, it requires both voltage and current sensors to solve the problem in contrast with buck converter that can be controlled using voltage sensors only.
Cost
The cost of each technique cannot be specified unless it is physically implemented. However, a comparison can be made on the basis of analogue or digital circuitry, requirement of software programing or hardware setup and the number of sensors used. Generally, analogue circuits are cheaper when compared with digital circuits having programmable chips.
Dynamic response
Dynamic response including rise and settling times are an important parameter to evaluate the controller performance. However, unfortunately these parameters cannot be discussed in tabular form as exact details could not be found unless and until these techniques are implemented on a system having same parameters. For the comparison a conventional PI was designed and tested on a same parameters of the system. In comparison with PI controller as shown in Figure 5 this technique provides an improvement of

Experimental results for closed-loop system with PI controller. (a) Step response of the system. (b) Response of the system when additional load is connected.
Applications
It is extremely important to consider the application in which a technique will be employed before selecting a technique. For example, in the case of voltage control in orbiting satellites, the dependability and performance are the highest priorities, with the cost and implementation complexity of the system being secondary considerations. Solar and electric vehicles require rapid convergence as well as low implementation costs, and in this scenario, analogue implementation is the most appropriate choice for these applications. When using PV arrays to power street lights, the controllers only have to charge the batteries during the day. As a result, they can be implemented utilizing procedures that are simple and minimally in cost.
To provide a guideline to the readers for general applications, the authors have gathered and summarized all the major characteristics of different fixed-frequency SMC techniques in Table 3, which should be consulted for selecting an appropriate method for a given particular application.
Comparison of different fixed-frequency SMC techniques.

Conclusion
The fundamental source of disturbance rejection in SMC-based systems is a discontinuous function. However, it causes frequency drifts, resulting in filter design problems related to EMC. This paper proposes a novel DISMC technique to fix the switching frequency in a power electronic converter while countering the effects of parametric variations and external perturbations. The control law is selected such that it incorporates an integral term that eliminates the reaching phase. The controller is tested under different load conditions and it is observed that the robustness is significantly improved. Experimental results are presented to validate the technique. Furthermore, a comprehensive comparison of different fixed-frequency SMC techniques along with their major characteristics have also been discussed in a tabular form. The comparison has been made on the basis of a few fundamental parameters allowing the readers to determine the feasibility of a technique to be used for a particular application.
Footnotes
Acknowledgements
The authors thank all the members of the research lab at the University of Lahore.
Declaration of conflicts of interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship and/or publication of this article.