
Abstract
This article investigates optimal cooperative control algorithms for spacecraft formation flying system that can guarantee collision avoidance between spacecrafts. By selecting potential functions to avoid collisions and constructing index cost functions to describe optimal control, the optimal control algorithms based on the state-dependent Riccati equations, which only require local information vectors, are presented that can guarantee the formation spacecraft to track the reference trajectory without collisions and achieve optimal performance states. Finally, the corresponding proof analysis by Lyapunov stability theory shows that the closed-loop system for spacecraft formation flying is asymptotically stable. The simulation results demonstrate the effectiveness of the proposed optimal cooperative control algorithms with desired control objectives, including trajectory tracking, formation optimality, and collision avoidance.
Keywords
Introduction
Cooperative control of nonlinear multi-agent system has received increasing research in recent years especially for the spacecraft formation flying (SFF) system.1–3 The optimal cooperative control has been proved to be an optimal condition for cooperative control, which can make the whole system reach the optimal performance index state. With the rapid practical applications for spacecraft formation missions, the importance of optimal cooperative control is worth investigating in the theoretical research and practical applications.4–6
Optimal cooperative control has been identified as one of the most important cases to consider for cooperative control in SFF system,7,8 where the goal is to select optimal cost functions to obtain performance index and to predict the system state in real time. Due to this fact, many control algorithms have been presented to solve this problem by combining the optimal methods with cooperative control. Krstic and Tsiotras 9 presented an approach to construct optimal feedback control laws for regulation of a rotating rigid spacecraft and gave a characterization of stability margins achieved with the inverse optimal control law. Another work associated with trajectory optimization was presented by Foderaro et al., 10 who presented a novel distributed optimal control for multi-agent and extended the capabilities with respect to classical optimal control. Considering the case of optimal control and collision avoidance simultaneously, a dual iteration algorithm was proposed to obtain optimal control with the effective penalty functions in the work by Li et al. 11
In more practical applications for SFF system, the formation missions are accomplished by the following reference path to complete trajectory tracking. Moreover, the goal for SFF system is similar to the multi-agent system; a suitable trajectory should be designed that can drive spacecraft to track the desired position rather than random movement with collisions. A trajectory planning method for spacecraft was proposed by Hou et al., 12 which is based on σ-parameters that can avoid the impassable singular state. Liu et al. 13 designed another novel trajectory tracking control law to deal with input saturation effect in which a stable dynamic formation system can be achieved. A similar type of control laws was formulated for multiple agents in the work by Mondal et al.; 14 based on Barbalat’s lemma, the authors proposed control schemes for the problem of trajectory tracking, in which the system can achieve connectivity assurance and collision avoidance simultaneously. Motivated by the need for fast trajectory tracking, based on the modified electromagnetic satellite model, Huang et al. 15 proposed an adaptive robust terminal sliding mode control which can achieve fast trajectory tracking and also can guarantee finite-time convergence in the presence of saturation.
In addition, the problem of collision avoidance is also one of the most crucial performance indexes in the SFF missions. The collision avoidance regions are constructed to guarantee that there are no collisions with each spacecraft in the formation flying, and the spacecraft can keep the reference trajectory out of the collision regions. Many methods, such as collision probability analysis and game theory, have been well used for collision avoidance control problem. Due to the advantages of global minimum in the desired state, potential functions have been widely studied by the researchers. The decentralized collision avoidance control law was presented by Lee et al. 16 for SFF tracking control; a virtual leader trajectory was used with an artificial potential function to avoid possible collisions between each spacecraft. The authors dealt with formation configuration convergence control in which collision avoidance and network connectivity for multi-agents can be ensured. In more practical studies, cooperative collision avoidance control has been originally formulated. 17 In the work by Dušan et al., 18 cooperative avoidance control laws with value functions were designed for individual agents which can guarantee collision-free conflict resolution. Moreover, the satellite formation containment flying control without collisions was researched by Chen et al.; 19 it was worth noting that the convex hull and close-range omnidirectional are both considered for the system. However, it can be seen that the references mentioned above only consider the local control objective for the SFF system and need all spacecraft state information.
Motivated by the work by Liu et al., 20 this article aims to solve the optimal cooperative control for SFF system with collision avoidance via constructing index cost functions and potential functions, respectively. The contributions of this article are twofold. First, the optimal cooperative control algorithms for SFF are presented, and the control objectives including reference trajectory tracking, collision avoidance, and state optimization can be achieved simultaneously. Moreover, by introducing potential functions and constructing index cost functions, based on the state-dependent Riccati equations, the optimal cooperative control algorithms require only local spacecraft information in the formation flying system.
The remaining parts of the article are organized as follows: the basic definitions and corresponding analysis for cooperative collision avoidance are briefly summarized in section “Background and preliminaries.” In section “Optimal cooperative control algorithm design,” the optimal cooperative algorithms and stability proofs are presented. Simulation results are given to verify the effectiveness of the proposed control algorithms in section “Simulations.” Finally, some conclusions are given in section “Conclusion.”
Background and preliminaries
Basic graph theory
For SFF system, the graph theory which is used to illustrate the information exchange can represent the spacecraft cooperative control problem briefly. In this article, the undirected graph

where

where
Lemma 1
For the undirected information exchange graph

Relative dynamics motion model
The SFF system is assumed as a set of rigid bodies, which is orbited in the Earth-centered inertial (ECI) coordinate system (OXYZ). The relative motion dynamics model is shown in Figure 1.

Spacecraft formation flying system relative motion model.
The reference spacecraft and the formation spacecraft are given by the following dynamic models


where

Furthermore, in order to describe the relative motion relationship in the LVLH coordinate system, equation (6) can be rewritten as follows

However, in this article, we assume that the SFF system runs on the Kepler elliptical orbit, and the relative orbital dynamics equation of the SFF can be converted into the form of components and linearized as follows (Appendix 1)

where
In this article, we assume that the relative perturbation acceleration of SFF is


where



The path following for SFF is shown in Figure 2 which describes the trajectory tracking and formation keeping. It can be seen that the spacecraft formation

The spacecraft formation flying system path following.
The desired state vector of spacecraft formation is defined as follows

Then, the error state vector of the spacecraft formation is defined as follows

The error state equation for SFF system can be expressed as follows

where
Cooperative collision avoidance control
The SFF system is assumed as a group of N-independent rigid bodies and the relative motions are expressed as equations (9) and (10). The cooperative collision avoidance control is aimed to guarantee the spacecraft to obtain the desired formation pattern without collisions. In order to achieve this control objective, according to each spacecraft in the formation flying system, the potential functions can be defined as follows

where

The SFF system with collision avoidance, shown in Figure 3, can express the communication graph and the connected graph directly. In this article, the information exchange topology for SFF is assumed to be undirected and connected. Then, the problem can be stated as follows: the spacecraft communicates with its neighbor spacecraft through communication range
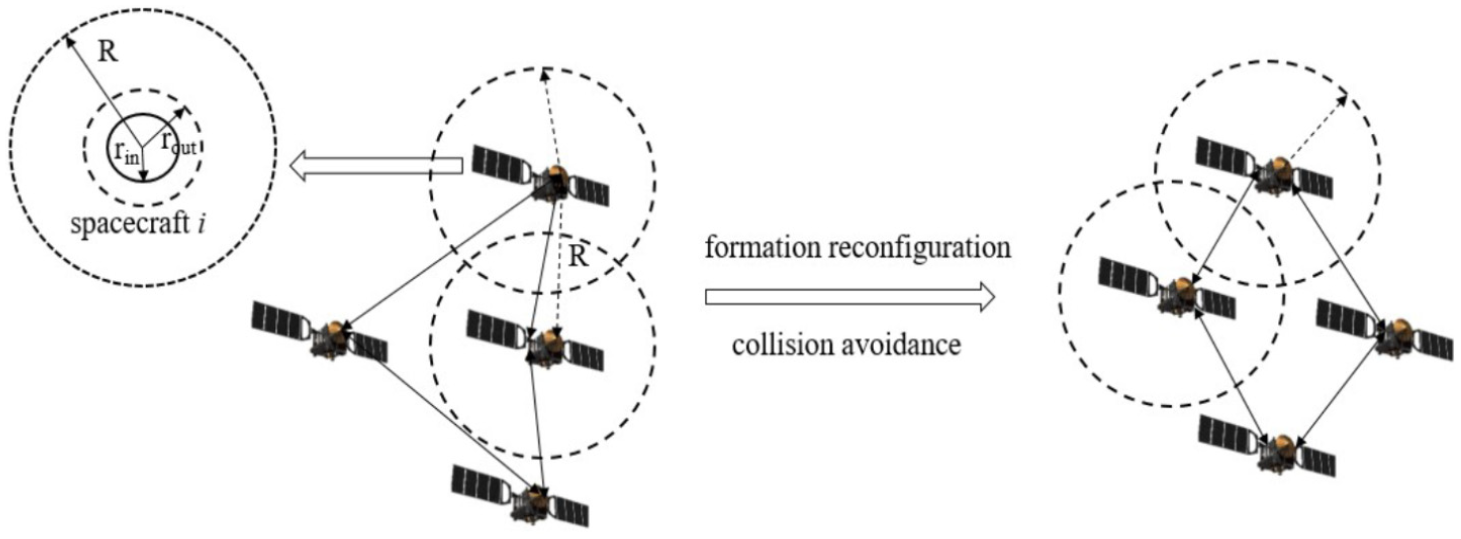
Spacecraft formation flying with collision avoidance.
The relevant constraints for SFF system can be defined by the following regions.
For collision avoidance region

For connectivity preservation region

For communication region

The total potential function is defined as follows

Then,
Optimal cooperative control algorithm design
In this section, the optimal cooperative control algorithms for SFF are proposed that guarantee the entire formation system asymptotically stable. In addition, an important corresponding lemma is first given to illustrate the optimality of the proposed cooperative control algorithms.
Lemma 2
The nonlinear controlled dynamical system is considered as 23

with

where







is the Hamiltonian function.
Then, with the feedback control law

Furthermore, the feedback control laws

where
Moreover, in this article, the cost functions are presented theoretically for measuring optimal control performance for SFF system, including formation error control cost, control constraint cost, and collision avoidance cost.
The optimal index cost functions are given as follows

where
The index cost functions can be divided into three parts:
Part 1. Formation error index cost

where
Part 2. Control energy index cost

where
Part 3. Collision avoidance index cost

However,

where
Theorem 1
If the communication graph is undirected and connected, the proposed optimal control algorithms (equation (37)) can guarantee the optimality and global asymptotic stability for the SFF system (equations (9)–(10))

The optimal index cost functions

Moreover, the feedback gain matrix

Proof 1
The optimal cooperative control problem mentioned above can be converted to the following form


The following Lyapunov function for formation system is constructed as follows

For obtaining the optimal cooperative control algorithms, the case of
where

Then, equation (37) can be rewritten in the following form

By equation (42), the derivative of Lyapunov can be obtained as follows

Substituting the feedback gain matrix (equation (39)), equation (45) can be rewritten as follows

The part of Hamiltonian function can be rewritten as follows

where the parts of
In order to let equation (47) to be zero, the following equation should be equal to zero

Then, with equations (38), (43), and (48), equation (47) can be rewritten as follows

From equation (49), we can conclude that condition (29) in Lemma 2 is proved.
Then, with equations (38) and (47), equation (45) can be rewritten as follows

Thereby, condition (27) in Lemma 2 is obtained that guarantees
Therefore, according to the evidence mentioned above, the proposed optimal cooperative control algorithms can guarantee the stability for the closed-loop system and has no collisions with each spacecraft which can also obtain system optimality.
Simulations
To verify the effectiveness of the proposed control algorithms in this article, the formation flying system of three spacecrafts is simulated in this section. The formation spacecraft orbital parameters and other parameters set at the initial time are shown in Table 1.
Orbit parameters of spacecraft formation flying system.

The Laplacian matrix

The initial formation configuration for spacecraft is centered on the reference spacecraft in which the radius is

The relative state initial values for three spacecrafts are shown in Table 2.
Relative state initial values.

The simulation results for the formation system with the proposed control algorithms are shown in Figures 4–7.

The relative position trajectory of formation spacecraft.

The velocity tracking error of formation spacecraft.

The relative position of formation spacecraft.

The optimal control input of formation spacecraft.
Figure 4 shows the three-dimensional tracking trajectory for SFF system. It can be seen that all the spacecrafts converge into the desired formation pattern and the distances between any two spacecrafts in the formation has no changes and without collisions among spacecrafts after around
The velocity tracking error and relative position of formation spacecraft are shown in Figures 5 and 6, respectively. The velocity component on the three-axis keeps and converges to constant because the desired velocity has the component. From Figure 5, it can be seen that the velocities of three spacecrafts in the formation converge to the constant velocity within
Conclusion
In this article, the novel optimal cooperative control associated with collision avoidance for SFF system was investigated. Moreover, it can be seen that the state matrix of relative motion for spacecraft formation is a linear form of the information vectors that only use the local information from the spacecraft. Based on the index cost functions to evaluate system state performance and potential functions to avoid collisions, the optimal cooperative control algorithms were proposed that can guarantee the asymptotic stability and optimal performance of the system. And the simulation results demonstrated that the effectiveness and the robustness of the proposed control algorithms can track the reference trajectory without collision avoidance.
Footnotes
Appendix 1
The semi-major axis, eccentricity, mean angular velocity, and true anomaly for the reference spacecraft orbit are denoted by
Follow equation (7), according to the reference spacecraft orbit coordinate system (oxyz)
Then, substitute into equation (7)
Furthermore, the relative distance between the spacecrafts is much smaller than the distance from the spacecraft to the earth center; then, the nonlinear part
In this article, we assume that the spacecraft formation flying system runs on the Kepler elliptical orbit, then the linearized motion equation of spacecraft formation flying can be expressed as follows
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.