
Abstract
The nonlinear problem of controlling the attitude of a suspended cargo during transportation and various flight phases of an aerial vehicle is considered. The control system requirement is to provide independent cargo attitude control relative to the aerial vehicle. The suspension is done by a cable and a pair of spherical joints on both sides, resulting in a system containing two oscillations of the cable and a two-dimensional rotation of cargo, simplified as a double spherical pendulum model. The technical solution is obtained by a reaction wheel system installed in the cargo and an Omni wrist at the pivot point. Different stages of flight, agile movement of the drone, and highly perturbed environments require a robust control capable of being adjusted rapidly to new operating conditions. Attitude control algorithms are synthesized based on the newly developed optimized integral sliding mode, and the sufficient conditions of reachability and convergence for the nonlinear case are derived. The efficiency of the algorithm is confirmed by the results of numerical simulation.
Keywords
Introduction
Aerial cargo transportation using an external cable sling of an aerial vehicle (AV), traditionally helicopters such as in sky cranes, has long proven its high efficiency in practice. Civil sky cranes like Sikorsky CH-54 and Mil Mi-10 have been used in diverse applications from the transportation of oversized cargo, firefighting, and construction in remote areas, for assemblies in high-rise constructions and installing supports for high-voltage power lines for decades. With the advent of unmanned AVs operating according to the helicopter principle (multi-copters), it became possible to use the same flying crane principle in operational conditions with even low carrying capacity. The presence of light electrics with high throttle response, as well as an increase in power supplies, makes it possible to create cheap radio-controlled AVs for medium-time operation ranging up to several kilograms and, therefore, more diversification of their usage.
On the other hand, the simplicity, easy-to-scale principles, and intensive development in the area have led to a significant increase in weight-carrying capacity. A significant number of devices of this type have already been created, capable of lifting up to hundreds of kilos. Some recent applications of these AVs using the hanging cargo principle include drone delivery and transportation,1,2 inspection and measurements, 3 geophysical research, 4 construction,5,6 aerial manipulation7–10 and comprehensive reviews. 11 A similar hanging principle is used in other aerial practices with balloons such as balloon-borne probing, 12 telescopes, 13 aerobots 14 for planet, and others.
The suspended cargo (SC) principle brings several important benefits such as inertia and agility improvement of the AV, the possibility to operate in narrow and difficult-to-access areas or places with harsh environments unsupported by the AV, and safe distance from the aerodynamic perturbations from the drone. However, the SC is associated with increased operational complexity and instability due to unpredictable (most often oscillatory) movement of the load under the influence of external disturbing factors, as well as self-excited oscillations of the cargo. Nevertheless, there are already several research works and mathematical tools of the SC-AV system, which describe its dynamics quite fully and allow, using appropriate software, hardware, and mathematical tools, to carry out the study of the effects of dynamics of the load on the AV and its stabilization.5,15,16
The issues of nonlinear dynamics, stability, oscillations, and control of various types of AV-SC systems with different trajectories under the influence of aerodynamics, as well as thrust forces applied to the carrier body, have been studied by many authors focusing on the stability of the system in equilibrium position during the maneuvers and different stages of flights.5,17,18 In several works, the main research related to SC is directed to ensure the load movement along the prescribed trajectory with the simultaneous suppression of the vibrations which can be divided into direct and indirect payload control. 19
In the methods of indirect payload control, the main target of feedback control is the AV with usually no precise measurement of payload trajectory and dynamics. In this case, only rough stability of the payload is obtained which is suitable for general-purpose applications like commercial deliveries. The mathematical models usually consider the payload as a mass point and the control strategies are designed to provide swing damping effect on the cable. Recent work on robust VTOL position control demonstrates improved disturbance rejection, 20 while adaptive learning-based approaches have advanced UAV flight control. 21 Some of these control strategies include passivity-based controllers, 22 backstepping, 23 adaptive compensators, 24 and input-shaping techniques. 25
In the direct control of the payload, the feedback loops and the AV trajectory are designed considering the dynamics of the payload. Hence a precise measurement of the payload pose and velocity and more complex control algorithms are provided to guarantee the dynamic stability of the payload and a smooth trajectory for the AV. Cameras, accelerometers, and Kalman filters are among popular tools for measurement of the payload dynamics.26,27 Model predictive control, sliding mode techniques, and passivity-based control strategies19,28,29 are used for position control where several AVs are carrying out a task. Recent advances in nonlinear tracking differentiators with variable damping ratios have shown promise for improved tracking performance in control systems, 30 while position tracking control methodologies continue to evolve for complex robotic systems. 31
Despite their variety, in most of the presented control strategies, the final position and orientation of the payload are directly related to the trajectory design of the AV. The strategy of adjusting the position of the AV using propellers has several drawbacks including
– significant guidance error;
– it depends on the altitude of the AV, the length of the released cable, and environmental disturbances;
– sometimes it is impossible to obtain a specific arrangement of cargo concerning external objects;
– it requires high energy consumption and essentially depends on the robustness and accuracy of control algorithms, sensors, and actuators.
These points lead to the important question about the independent attitude of the suspended cargo which has not been considered in the current literature. Although from the practical point of view, it is not a necessary requirement for many applications, including the delivery of commercial products, the expansion of tactical and technical capabilities of the system can be increased if the controlled orientation of the cargo at the free end of the cable could be achieved. The precise attitude control of the cargo in applications like aerial scanning, precise observation, measurements, or carrying liquids is considered an essential requirement.
The general problem of end-body motion control, in particular the problem of stabilization of a suspended cargo in non-equilibrium positions, is developed mainly in applications related mostly to cranes, space systems, and physical pendulums implementing two common control strategies: passive and active.32–34 Active control systems use cable length and tension manipulation, thrusters or engines, and rotating masses (rotors, gyroscopes, etc.)35,36 and compared to a passive control, it provides a higher rate of transient decay and accuracy, as well as the required value of the quality criterion.
Despite the well-known theory, there are only a few proposals for controlling the orientation of the end-body of flexible cable in the AV. Some recent works,37,38 propose an additional propulsion system, consisting of several propellers arranged in a specific way and rigidly connected to the lower part of the cable. Although effective for helicopters, due to excessive weight and undesired disturbances from the propellers, it is difficult to scale it down for drone applications.
Some authors propose the use of multiple cables in a single drone to be able to manipulate the cargo by increasing the attachment points. 16 Although this can improve the controllability of the payload the possibilities of attitude control are quite limited. The stability and attitude control can be improved when using multiple drones for suspension of a single cargo.2,6,19 This architecture provides better cost efficiency and higher redundancy but comes with the cost of applying more complicated motion and formation controls while precise attitude control still cannot be guaranteed.
The objective of this paper is to introduce an independent actuator and controller system to guarantee the attitude control of cargo while dealing with the previously mentioned disadvantages. To reduce the mathematical and technical complexity of the system a practical approach is to consider the system as a double spherical pendulum hung from a moving AV which is considered to have independent dynamics.
This work develops a mathematical model to analytically study the dynamics of SC during its transportation or hanging and provides sufficient technical and analytical propositions to carry out the attitude control of the payload as well as the oscillation attenuation during the operation.
Synthesis of control laws for dynamic systems of AV-SC requires the application of robust methods of the theory of nonlinear automatic control. This is due to the required quickness posed on the cargo which is hung from an agile AV flying in a harsh environment whose characteristics change frequently. To reach this objective an algorithm based on averaged sub gradient integral sliding mode control has been implemented. The online optimization is implemented to minimize a given convex function of the current states.
Main contributions
The main novel contributions of the proposed method are
– Unlike existing approaches where cargo orientation is coupled to AV trajectory, the attitude of the suspended cargo is precisely controlled by using the present strategy;
– The attitude of the SC is considered independent and does not impose any restrictions or strict behavioral trajectory on the AV, requiring only knowledge of the AV’s current position and velocity rather than predetermined flight paths. This is a key feature not directly achieved in previous works. This characteristic simplifies the AV control, especially in cascade architectures, and extends its maneuvering abilities;
– The controller of the cargo does not require any exact feedback measurement of the AV dynamics;
– Robustness, optimal behavior, as well as convergence of the controller and its parameters, are obtained analytically;
– The controller has a fast auto-tuning rate, which is important for systems with fast dynamic behavior.
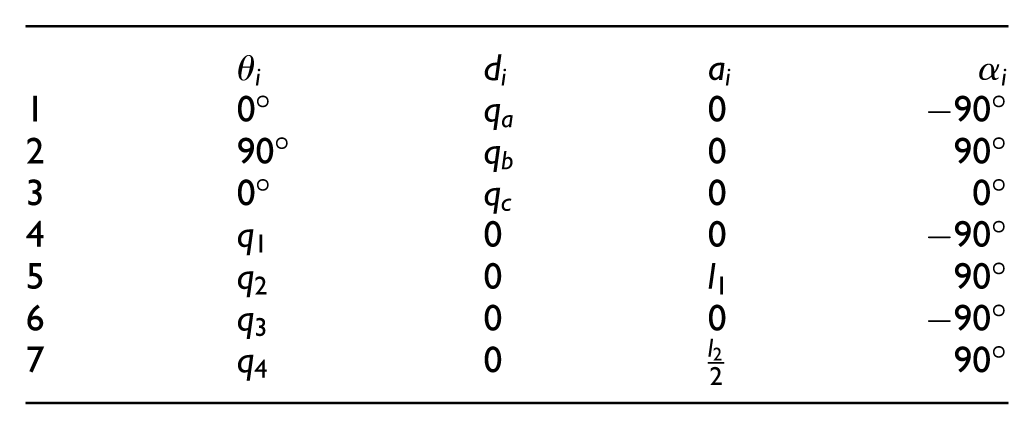
The remainder of this paper is organized as follows: Section 2 presents the problem formulation and mathematical modeling using Denavit-Hartenberg parameters. Section 3 develops the control design based on integral sliding mode with online optimization. Section 4 presents numerical simulation results demonstrating the controller performance. Section 5 concludes the paper.
Problem statement and mathematical model
This section introduces the mathematical framework for the AV-SC system, including the problem statement and system assumptions (Section 2.1), equations of motion using Denavit-Hartenberg parameters (Section 2.2), and the dynamic model in standard Lagrangian form.
The problem of attitude control and stabilization at the equilibrium position of the suspended cargo is considered. The SC consists of an end-body, equipped with reaction wheels and an instrument that requires a precise orientation, and a long cable attaching it to the body of a carrier AV through a miniature omni-wrist. 39 The cable is considered a flexible and inextensible thread that does not experience resistance to bending but maintains constant length. It is assumed that the center of mass of the carrier AV moves along a designed trajectory in the outdoor area while simultaneously being affected by bounded disturbances.
Consider the case where the carrier AV is moving along a trajectory defined in the inertial fixed Earth coordinate system
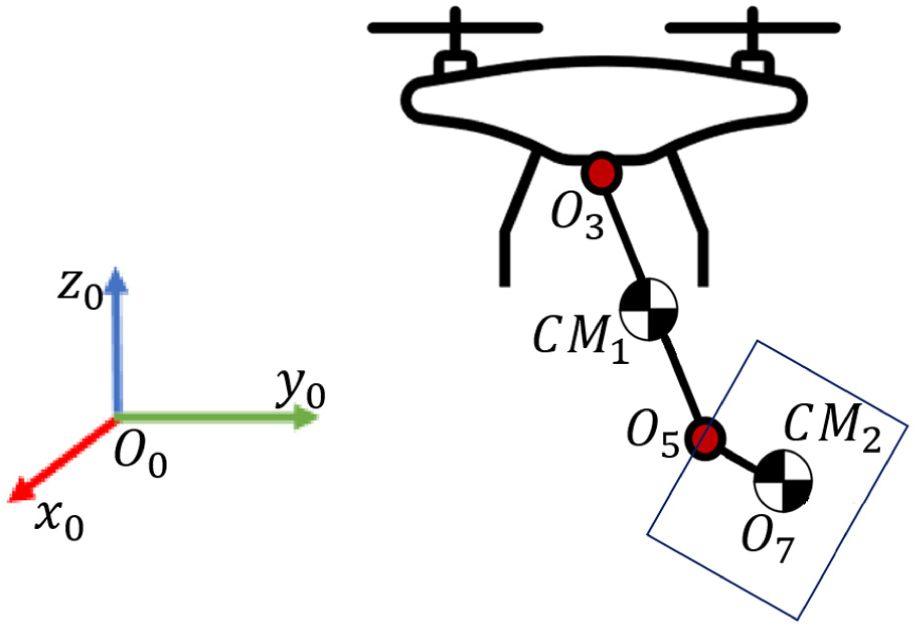
AV-SC system concept.
Problem statement
The problem is considered as a spherical double pendulum with constrained torsion due to the inextensible cable (length
The task of the reaction wheels can be divided into oscillation cancelation in the cable and attitude control of the cargo.
Equations of motion
The drone-cargo system is analyzed as a spherical double pendulum with a movable suspension point following a known trajectory. Since the torsion of the cable is neglected and no deflection is considered, then the system can be modeled as a rigid robot described by three coordinates for the position of the UAV and four coordinates for the cable and suspension rotations. Henceforth
The following DH-table is used to describe the system configuration, see Figure 2.
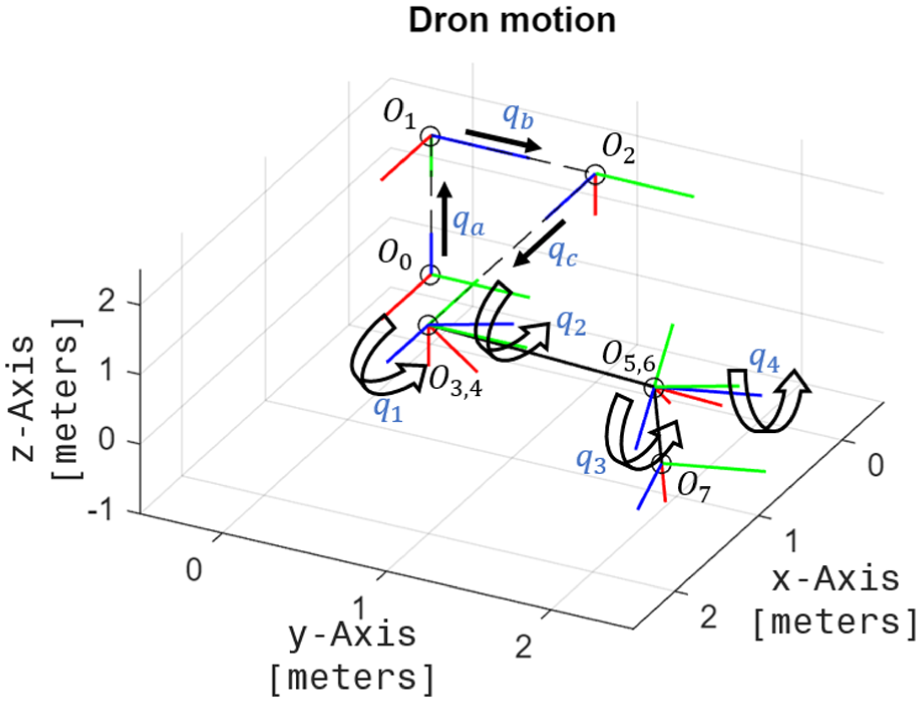
Coordinate frames and possible motions described by the DH-table.
Observe that the inertial frame is given by
The coordinate frame
Defining

where the inertia matrix

where

and

and denoting as

From the fact that

where
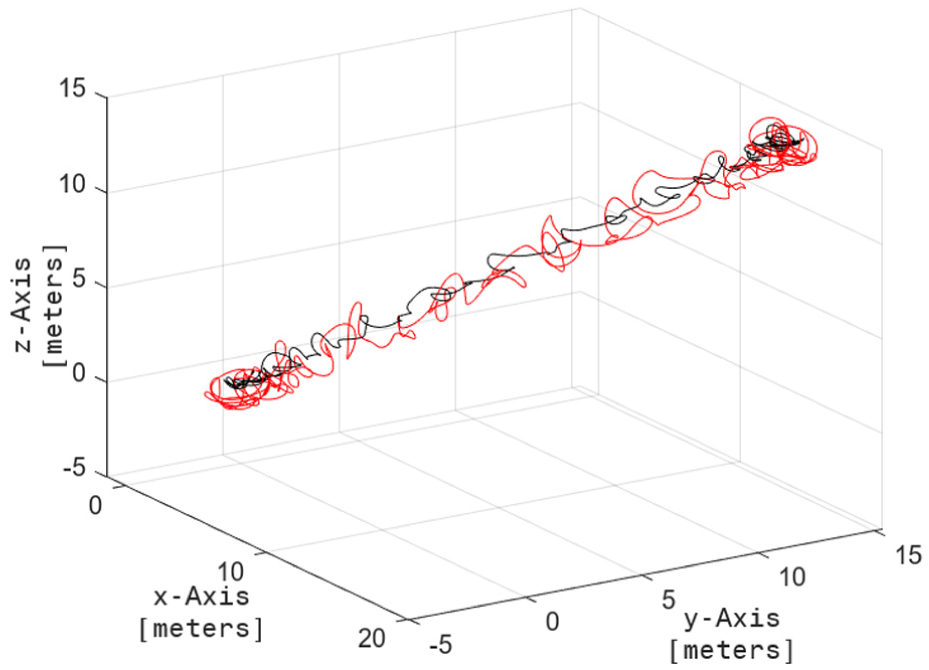
Motion of the cable and the cargo's center of mass during linear drone movement.
Attitude control actuator
The reduced 4-DOF system has four degrees of freedom that require actuation. As the actuator for the first pendulum with two degrees of freedom, a miniature Omni-Wrist is considered.
39
This device is able to create independent torques
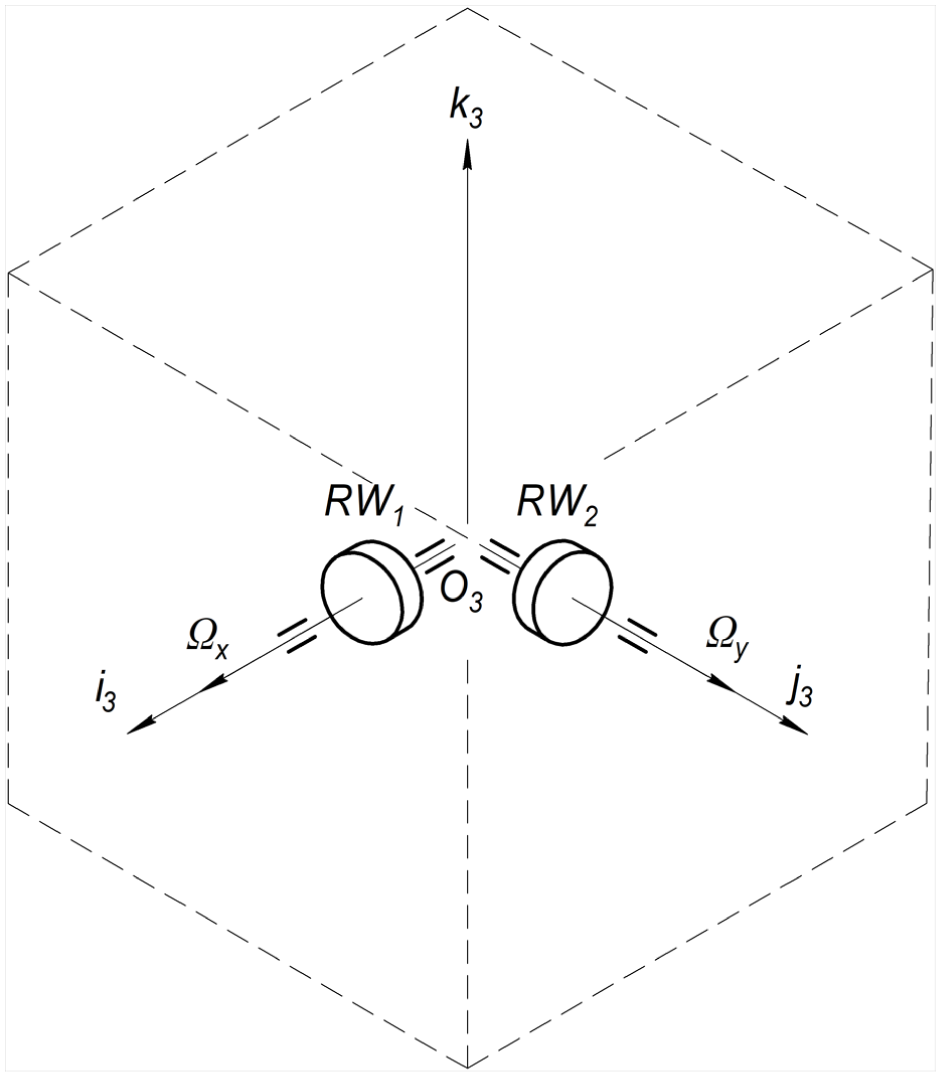
Schematic representation of the suspended cargo with two reaction wheels.
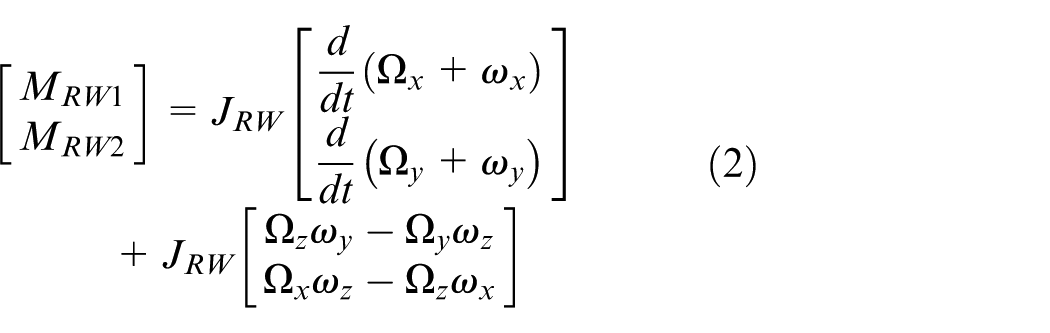
When an object is oriented relative to the rotating base frame, cross-links arise between the control channels due to gyroscopic moments. This circumstance requires the simultaneous consideration of the orientation control processes along all axes, taking into account these cross-links. The mass of the suspended cargo has been calculated taking into consideration the projections of inertia moments of blocked reaction wheels

where
where

From which it follows that
Having established the complete dynamic model, we now proceed to develop the control strategy for attitude stabilization and tracking.
Programed attitude control and stabilizing control design
This section presents the controller design methodology, covering deviation dynamics (Section 3.1), integral sliding mode control structure with online optimization (Section 3.2), and stability analysis with convergence guarantees (Section 3.3).
For the reduced 4-DOF system, equation (1) can be rewritten as

where

Observe that
Double spherical pendulums, apart from being a classic example for the study of unstable objects, 40 turn out to be an adequate model for several technical applications. The models are often used in the design and calculation of the stability of walking robots, cranes, space elevators, and others.33,34,41 In most cases, the control action is applied at the suspension point and hence the methods related to the total energy of the system are popular.34,42 For the case of swing angle reduction in three-dimensional overhead cranes with a Cartesian coordinates system and taking into consideration the dynamics of Hook and cargo as well as actuator saturation, the authors in 34 proposed a nonlinear controller which is based on energy analysis; then, using the Lyapunov method, the authors guaranteed the stability of the proposed controller. In, 32 an adaptive nonlinear controller for rotary cranes based on the dynamic model of the system has been presented. As for the control objective, sway rejection is achieved and asymptotic stability around the equilibrium point has been proved using Lyapunov techniques.
An adaptive neural network controller which requires only the output feedback position and the velocity signals of the trolley has been proposed in 43 for a swing-free proposal of a planar double-pendulum. Kutsenko et al. 41 implemented a geometric technique and by selecting the initial conditions of oscillations, predict a non-chaotic trajectory for the second pendulum. This passive control uses Pyro-techniques and is implemented to unfold three-dimensional space structures.
The difficulties increase when the state is to be brought to the unstable equilibrium position and when the dynamics of the pivot are considered to be independent. In this case, it is necessary to manage the relative movement of the links in such a way that the gravitational and disturbing forces, as well as the external torques created by the movement of the AV, together with the active control moments, contribute to bringing the pendulum to the desired position. Taking into consideration the fast movement of the AV in position and attitude and the aerodynamic effects on the SC adds the agility requirement to the control algorithm.
To overcome the above-mentioned conditions a robust control algorithm is desirable. Since we deal with an unknown plant where the state variables of both AV and SC are measurable and available, an online optimization method is proposed. The controller should be designed so, that once adjusted, it can be tuned rapidly with the new operating conditions. The algorithm is the modification of the recently proposed controller by Poznyak et al. 44 developed for the linear uncertain Lagrangian dynamic controlled plant with permanent magnet dc-motors. The proposed method has been modified for the present nonlinear case.
Design rationale
The integral sliding mode control (ISMC) with online optimization is selected for this application due to several key advantages: robustness against bounded uncertainties without requiring exact knowledge of disturbance bounds, finite-time convergence guarantees crucial for fast aerial vehicle dynamics, online parameter adaptation through averaged sub gradient optimization eliminating extensive offline tuning, and model-free implementation requiring only cargo position and velocity measurements. The
Deviation dynamics
For the reduced 4-DOF system, in order to resolve the tracking problem for the given nominal attitude trajectories

and the error dynamics

where
Henceforth, it is assumed that
A1 The vector of generalized coordinates
A2 The matrix
A3 The uncertain
A4 The aerial vehicle trajectory and its derivatives are available for feedback.
A5 The cable remains taut throughout the operation and cable dynamics are captured by the pendulum model.
Problem formulation
Objective function
Consider the convex cost function

which promotes uniform convergence across all error coordinates, with a sub-gradient
Under the assumptions A1–A3, a control action

About the sliding variables
To attain the desired behavior a sliding variable

where the time-varying gain
for some

Observe that this sliding variable is affected by only the error in one coordinate.
System convergence in the sliding variable


for some constant
Physical interpretation of mathematical convergence The mathematical convergence result (7) has direct physical significance:

where

with

Defining

and observing

whose energy is defined as
From this last expression will be derived our result. Deriving both sides of equation (10) we have

and using equations (8) and (9), we have
Since

while the second right-hand side term is bounded using the equality

Then,
Integrating the last inequality in the interval
completing squares, and using the fact that

where

which finally leads to the desired result


relation (11) becomes

Main theorem on robust controller
Now, a controller is designed to assure the mechanical system will reach the sliding variable. This is stated in the following theorem.

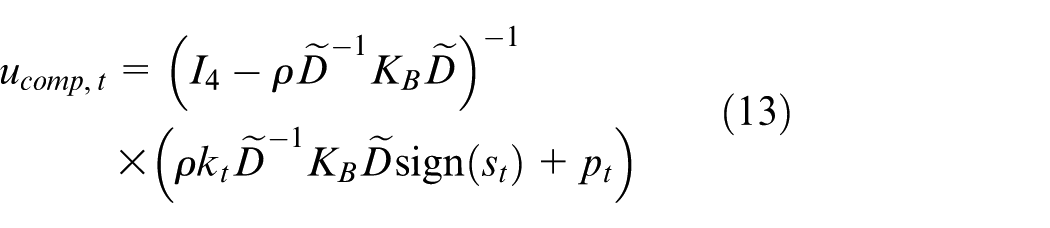
where
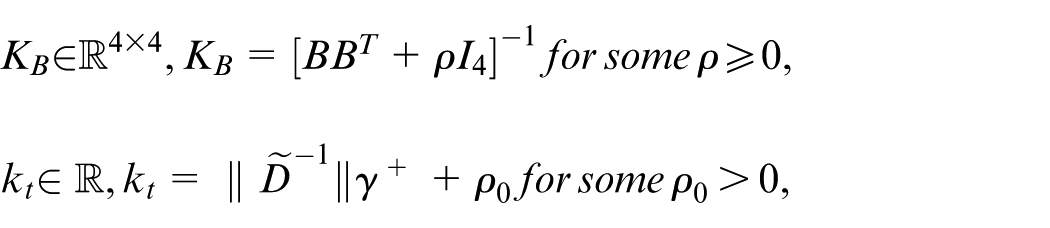
Mathematical design principles for control gains The controller gains are not arbitrary but follow specific mathematical design principles:
Invertibility: The regularization term
Optimal projection:
Robustness: Parameter
Uncertainty domination: The term
Convergence guarantee: The excess gain
Finite-time reaching: The sliding surface is reached in finite time
guarantees the functional convergence of equation (7).

whose derivative is
Using equations (3) and (14) it can be simplified as

By substituting (12) in

since
or

where control law (13) was used. Observe that equations (12) and (13) follow the same strategy as in the feedback linearization controllers. Finally, equation (15) becomes

or equivalently

Thus,
and the Lyapunov function is bounded as

implying

and

which leads to the conclusion that for all

we have that

and it follows from (5) that
The theoretical developments presented in the previous sections are now validated through numerical simulations.
Numerical simulations and results
This section presents simulation results demonstrating the effectiveness of the proposed control approach under two scenarios: (1) stabilization of the cargo to the equilibrium position, (2) tracking of arbitrary attitude references, both under bounded disturbances; and finally, (3) a brief comparison between our control strategy and the conventional sliding mode controller and feedback linearization is discussed.
This section introduces the graphical results of the suspended cargo system’s modeling, stabilization, and attitude control. Bounded disturbances and model uncertainties are included. The bounded disturbance term encompasses wind forces, aerodynamic drag on the payload, and other environmental perturbations. Practical implementation would use control saturation to enforce torque limits. The reported control efforts (10–25 N·m peak) are within typical capabilities of the proposed actuation system. Note that the cost function attains asymptotically its minimum value, with convergence speed that can be adjusted according to the controller’s gains.
The numerical simulations were conducted with the following system parameters: cable length
The system behavior while stabilizing the cargo into the origin is shown in Figures 5 and 6; meanwhile, the system behavior while controlling the cargo attitude to an arbitrary point is shown in Figures 7 and 8.
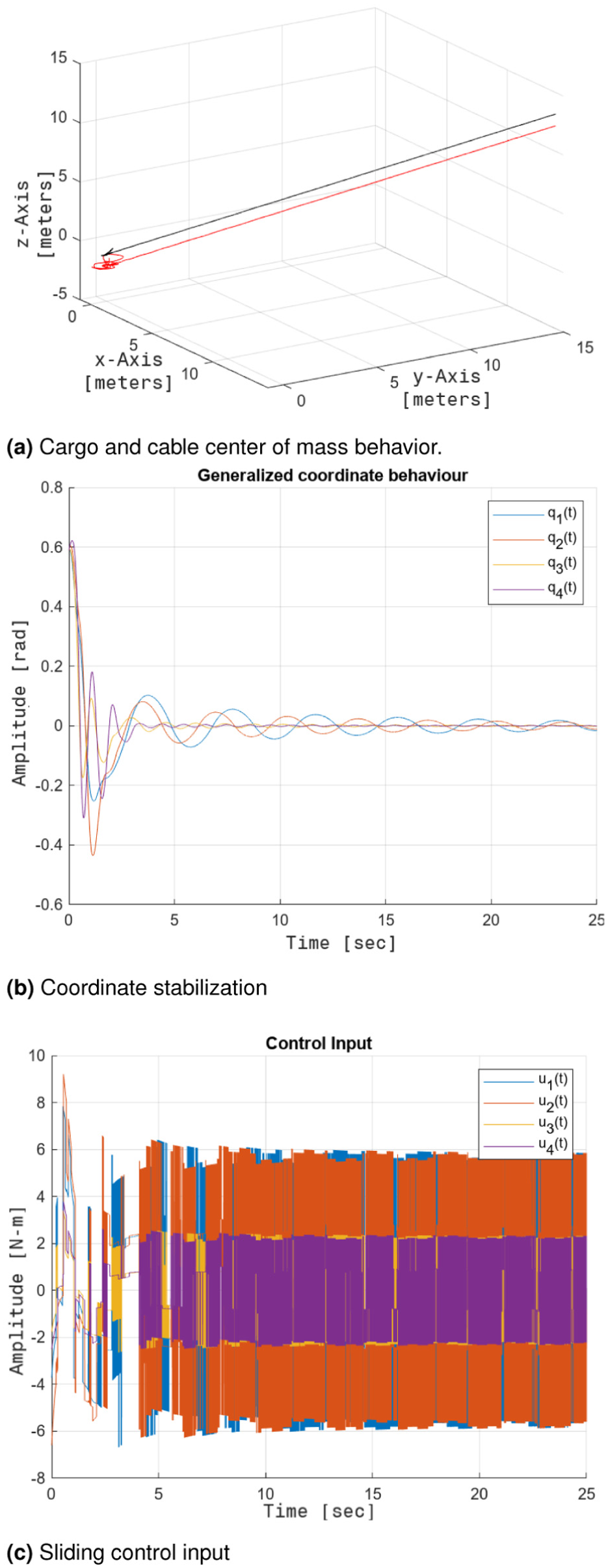
System behavior while stabilizing the cargo to the origin: dynamic response and control signals: (a) cargo and cable center of mass behavior, (b) coordinate stabilization, and (c) sliding control input.
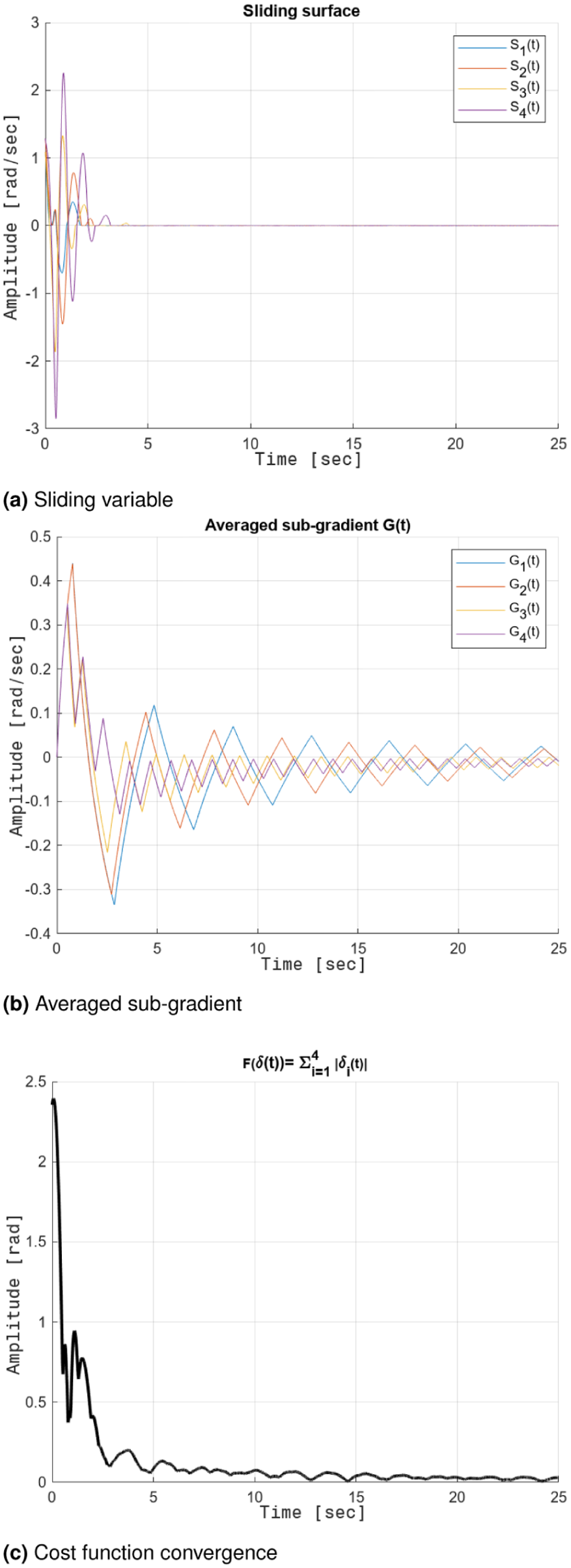
System behavior while stabilizing the cargo to the origin: control surface and algorithm convergence analysis: (a) sliding variable, (b) averaged sub-gradient, and (c) cost function convergence.
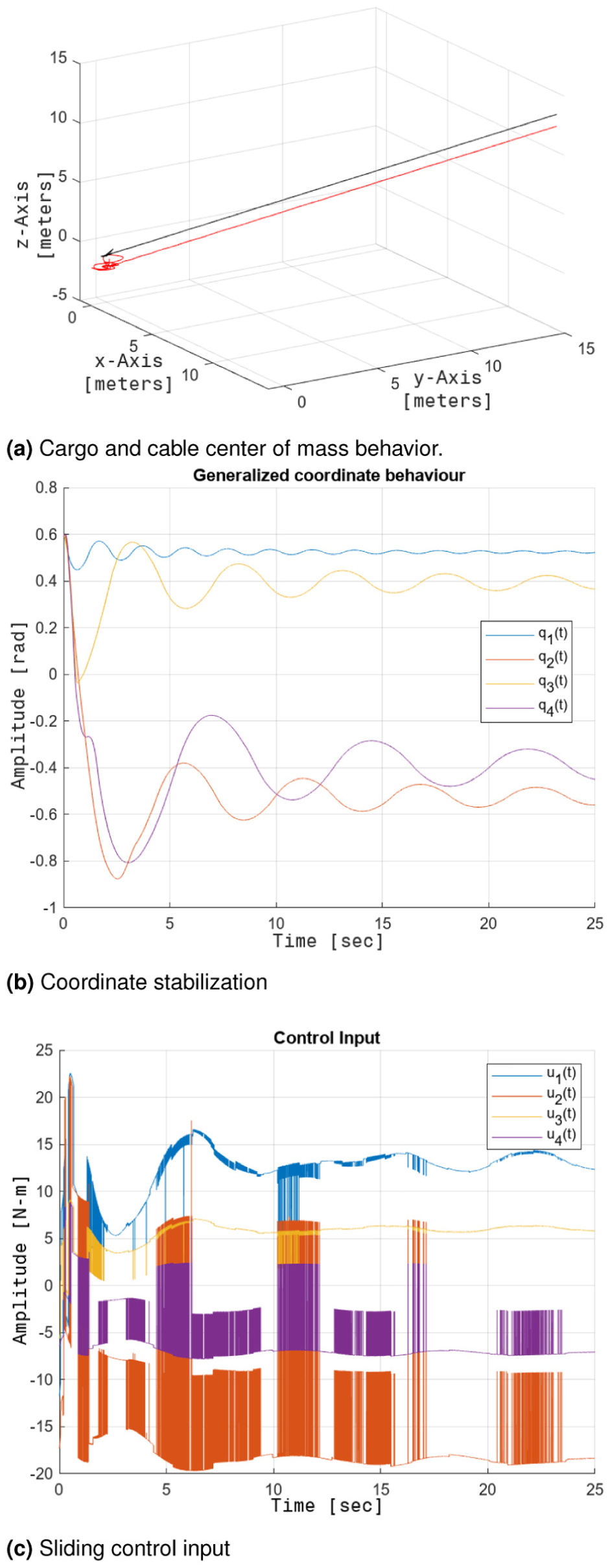
System behavior while stabilizing the cargo attitude to some arbitrary point: dynamic response and control signals: (a) cargo and cable center of mass behavior, (b) coordinate stabilization, and (c) sliding control input.
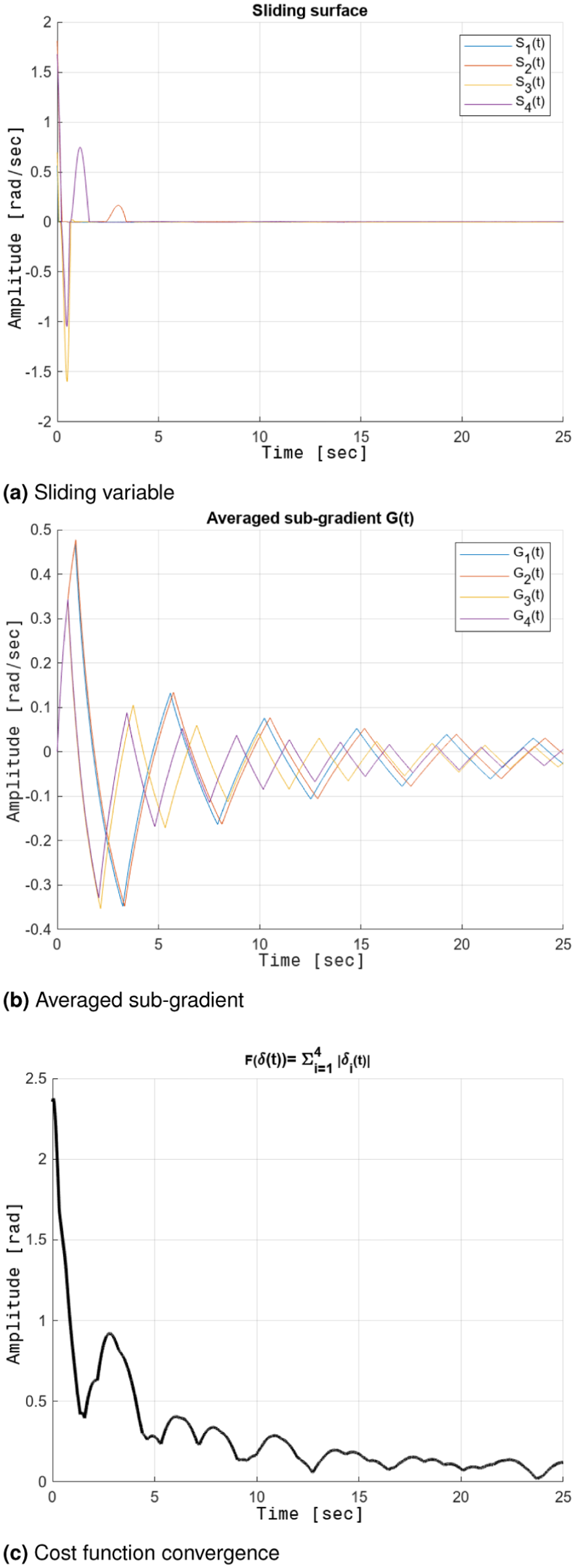
System behavior while stabilizing the cargo attitude to some arbitrary point: control surface and algorithm convergence analysis: (a) sliding variable, (b) averaged sub-gradient, and (c) cost function convergence.
For the case of attitude control to an arbitrary setpoint, the system demonstrates similar robust performance characteristics. The dynamic response and control analysis are presented in Figure 7, while the algorithm convergence is shown in Figure 8.
Quantitative performance comparison
The simulation results provide the following performance metrics across both scenarios. For the stabilization task (Scenario 1, Figures 5 and 6), all four attitude coordinates converge to equilibrium within approximately 5 s with steady-state errors below 0.05 rad. The control effort peaks at approximately 10 N·m during initial transients and settles to a range of 2–6 N·m. The cost function converges from its initial value of 2.5 to near zero within 5 s, confirming the optimization-based approach effectiveness. For the tracking task (Scenario 2, Figures 7 and 8), the controller successfully tracks time-varying oscillatory reference trajectories with peak control efforts of approximately 25 N·m, reflecting the additional demands of trajectory following. The sliding variables reach zero within 5 s in both scenarios, validating the finite-time convergence property established in Theorem 3.1. Qualitatively, the tracking scenario exhibits more variable control signals due to the continuous adaptation required for reference tracking, while the stabilization scenario demonstrates smooth convergence with minimal oscillations. Both scenarios confirm the controller’s robustness under bounded disturbances and the practical feasibility of the control magnitudes for reaction wheel implementation.
Parameter sensitivity
The sliding mode gain
Reliability considerations
The sliding mode control framework provides inherent reliability thanks to its insensitivity to matched uncertainties once the sliding manifold is reached. The formal stability proofs (Section 3.3) guarantee finite-time convergence even under bounded disturbances, fundamental factor for reliable operation. On the other hand, the controller maintains stable under simultaneous parameter variations of 10% (cable length), 10% (mass), and 10% (inertia), demonstrating substantial robustness margins and reliability. For experimental deployment, advanced reliability frameworks integrating machine learning-based anomaly detection and fault diagnosis 46 would provide additional safety layers beyond the sole robustness properties of sliding mode control, representing a valuable direction for future work.
Computational considerations
The control law implementation requires
Chattering mitigation
The saturation function
Controller comparison
The control strategy in (12) was compared with a conventional feedback linearization controller,

and a conventional sliding mode controller,

Figure 9 shows the cost function
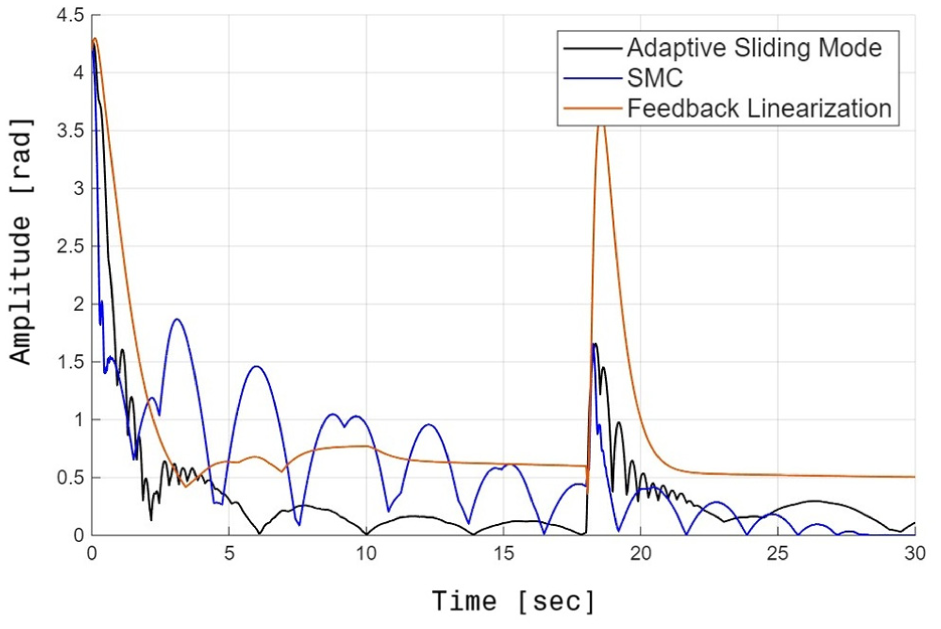
Different behavior between controllers.
For the comparison between the sliding mode controllers, a low-pass filter was included to emulate a more realistic implementation. It can be observed that the adaptive sliding mode controller exhibits faster convergence at the beginning of the experiment. However, due to the decaying factor in the sliding surface of the adaptive controller, its convergence rate may be slower for a perturbation that occurs later in the experiment.
Moreover, as expected, the greatest difference between the proposed adaptive controllers is reflected in the sliding surface behavior (Figure 10), where the decaying coefficient in the novel sliding surface yields better convergence to the sliding surface and significantly reduces the chattering phenomenon.
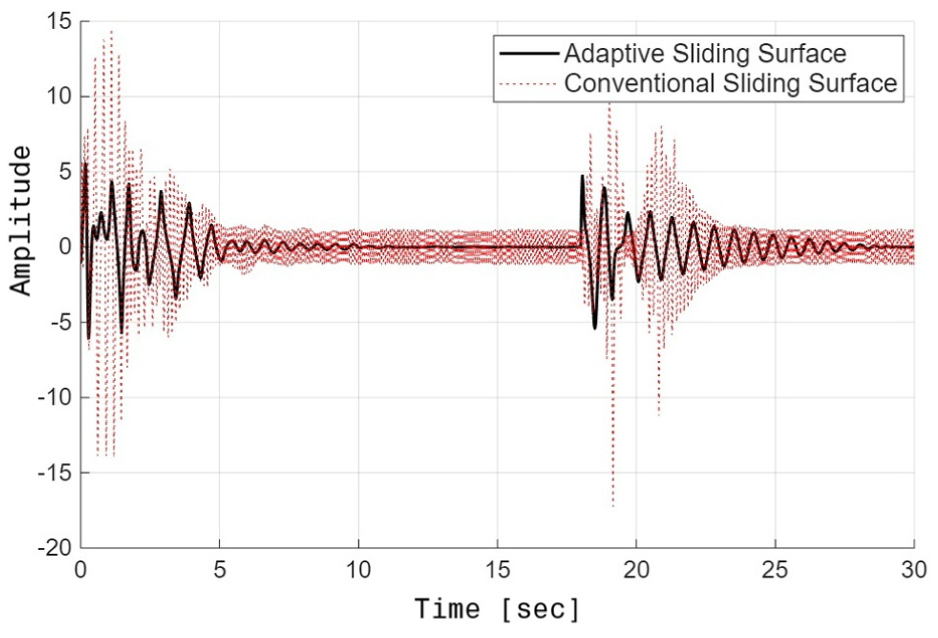
Comparison between sliding surface in both sliding mode controllers.
Conclusions
This paper presents the results of the mathematical model and control of an aerial vehicle-suspended cargo system with an articulated suspension. The system represented as a double spherical pendulum has a highly nonlinear and chaotic character, especially in the case of movement of the AV.
The main contribution of this work is the development of an independent attitude control system that decouples cargo orientation from the aerial vehicle trajectory, addressing a significant gap in current literature. The validity of the architecture, the correctness of the mathematical model, and the effectiveness of the proposed controller are validated through numerical and 3D simulation.
The developed robust control algorithm with online optimization performed accurate attitude control considering the movement of AV and external disturbances. Theoretical analysis provided sufficient conditions for reachability and convergence, with formal proofs establishing asymptotic cost function minimization. Furthermore, the superiority of the integral sliding mode controller, including higher robustness and lower settling time, compared with common sliding mode algorithms is also demonstrated.
The practical implications of this research extend beyond academic contributions, offering potential applications in precision aerial delivery systems, aerial photography and surveying, and specialized cargo transportation where maintaining specific orientations is critical. The independence of cargo attitude control from vehicle trajectory significantly enhances operational flexibility and mission success rates in complex environments.
Future work will focus on experimental validation and integration with vision-based state estimation systems to further advance autonomous aerial transportation capabilities. Incorporating elastic cable dynamics for flexible or long cables represents another valuable extension for future investigation, though it would require a different modeling approach using partial differential equations.
Footnotes
Ethical considerations
This study did not involve human participants or animals; therefore, ethics approval was not required.
Consent to participate
There are no human participants in this article and informed consent is not required.
Consent for publication
This article does not contain any personal information that would require consent for publication.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The code used for analysis is available from the corresponding author upon reasonable request.