
Abstract
In this article, nonlinear uncertainty has been investigated for a hypersonic reentry vehicle subject to actuator saturation via active disturbance rejection control technology. A nonlinear extended state observer is designed to estimate “total disturbances,” which is compensated with a linear controller. Both convergence of the nonlinear extended state observer and stabilization of the closed-loop system are studied in this article. Some simulation results are given to illustrate the effectiveness of the proposed method.
Keywords
Introduction
Being widely used in military and civil, hypersonic reentry vehicles (HRVs) are profoundly significant in the word. The key issue of attitude tracking of HRVs has received considerable attention. 1,2 Although there are internal and external disturbances such as three-dimensional coupling relative dynamics, rarefied air, complicated temperature variation, possible wind shear, or other uncertainty, the HRV system has highly nonlinear characteristics. 3 –5 It is difficult to achieve a real-time and precise control for an HRV system. According to the literature, various schemes related to attitude control design for HRVs have been developed over the past decades. In the study by Zong et al., 6 a combined nonlinear observer and back-stepping technique has been adopted for designing a dynamic output feedback controller to track velocity and altitude reference trajectories. In some studies, 7,8 sliding model controllers have been introduced for HRV attitude tracking problems in the presence of multiple uncertainties under control constraints. Many effective neural network controllers have been investigated via a back-stepping approach for longitudinal dynamics of generic hypersonic aircrafts. 9,10 Moreover, both altitude and velocity are controlled to follow a given desired trajectory in the presence of aerodynamic uncertainties. 11 Furthermore, there is still room for further advancement on this issue, which motivates us to make an in-depth study in this article.
Both complicated environment and uncertain disturbances in the flight process of HRV are difficult to be measured. To overcome the disadvantages caused by uncertain disturbances in nonlinear systems, some investigations have been done in recent years. 12 –14 To efficiently tackle unknown external disturbances, a nonlinear disturbance observer has been developed for a class of nonlinear systems. 15 In the work by Chen and Ge, 16 both a state observer and a nonlinear disturbance observer have been developed to estimate unmeasured states and unknown compounded disturbances, respectively. In earlier studies, a method of Kriging approximation was adopted to estimate the uncertainty for hypersonic aircraft model. 17,18 To promise the robustness and disturbance rejection performance for tracking control of air-breathing hypersonic vehicles, a nonlinear disturbance observer–based control law has been presented in the studies by Yang et al. 19,20 In the work by Zheng et al. and Godbole et al., extended state observer (ESO), one of the most important components of active disturbance rejection control (ADRC), has been widely used to estimate uncertain terms or disturbances for nonlinear systems. 21,22 An ESO has been proposed for attitude control of a missile model to estimate nonlinear parts in real-time aerodynamics. 23,24 In the study by Xia et al., 25 inertia uncertainty and external disturbances have been estimated by ESO to guarantee state variables of tank gun system to converge to reference states. For the nonlinear HRV system, different forms of ESO have also been applied to estimate uncertainties in attitude and angular rate loop. 26,27 Moreover, nonlinear tracking differentiator (TD) as other component of ADRC has been used for fewer control consumption and smooth transient performances in the studies by Shao et al. 27,28 Note that actuator saturation exists commonly in systems. To deal with the problem of actuator saturation in HRV systems, filters with magnitude limit constraints have been used. 29,30 In the study by Chen et al., 31 a parameter adaptive method has been used to deal with unknown time-varying disturbances and input saturation to achieve improvement in robust controllability of hypersonic flight vehicles. The disturbance observer–based terminal sliding mode control has been employed to follow the desired attitude command signals of the hypersonic flight vehicles subject to unknown disturbances and input saturation. 32 Thereby, HRV systems with actuator saturation have not yet been fully investigated via ESO in ADRC. The main goal of our work is to improve the results of actuator saturation of an HRV system with nonlinear uncertainty.
In this article, ADRC is used to deal with the problem of nonlinear uncertainty in an HRV system with actuator saturation. TD is applied to arrange a transient process for a reference trajectory of the HRV system. Particularly, the HRV system is transformed into a multi-input multi-output system (MIMO) system with aerodynamic torques and attitude angles. A nonlinear ESO (NLESO) is designed to estimate the “total disturbance,” which is compensated with a real-time nonlinear error feedback controller. The problem of actuator saturation is also considered in this article to avoid actuator supersaturation harming the whole HRV system. In this article, some simulation results are given to illustrate the effectiveness of the proposed method.
The article is organized as follows. In the second section, the model of HRV is introduced. ADRC for the HRV system is designed in the third section. The convergence analysis of NLESO and stabilization analysis of the closed-loop HRV system are dealt with in the fourth section. Some simulation results are shown to demonstrate the effectiveness of the proposed method in the fifth section and the final section concludes
Notations: In this article, the superscripts “T” stand for the transpose of a matrix. ℝ denotes the set of real numbers. The shorthand diag{⋯} denotes the block diagonal matrix. ∥⋅∥ stands for the Euclidean norm. sat(⋅) stands for the saturation function, and the expression of sat(u) is

The expression of

HRV model with actuator saturation
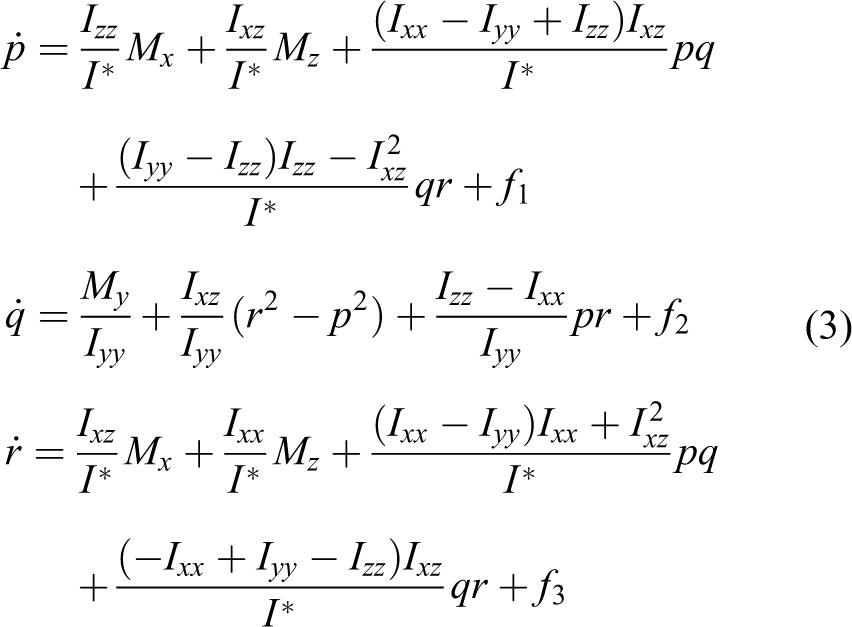
Consider a rigid HRV described by the following attitude kinematics and dynamics equations 33

and

where χ is the heading; γ is the flight-path angle; δ, τ, and ΩE are the latitude, longitude, and Earth’s angular velocity, respectively. α, β, and σ are angles of attack, sideslip, and bank, respectively. p, q, and r are angular rates of body-fixed reference frame of HRV. Mx, My, and Mz are aerodynamic torques of attack, sideslip, and bank angles, respectively. f1, f2, and f3 denote external disturbances. I is the inertial tensor in the body frame of HRV defined as

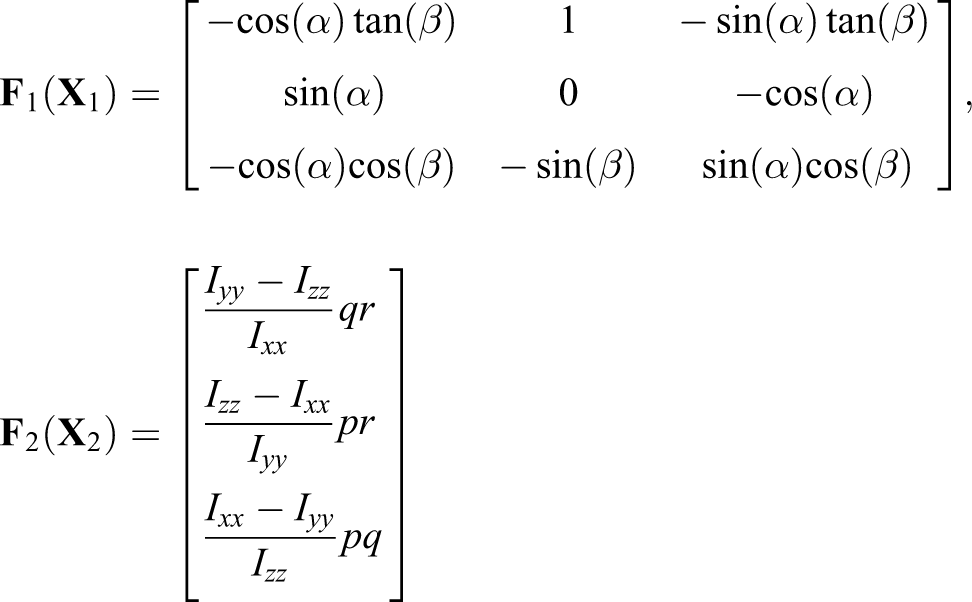
Note that system (2) is rewritten to the following form
In order to separate controllers from states and set disturbances produced by uncertainties in aerodynamics parameters and other factors as disturbance combinations Δ, which are unknown but bounded, the rotational equations in (1) and (3) of motion are rewritten as

and

For simplicity and actuator saturation being considered, equations (4) and (5) are rewritten as the following nonlinear form

where



Next, set
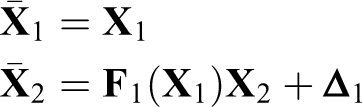
So system (6) is rewritten in the following form

where

The form of differential equation for the state space expression (7) is given as

The main purpose studied in this article is to control the attitude angles precisely for HRV. By setting

Based on the second-order differential equation (9) and denoting

Remark 1
In this article, both the controller outputs and the attitude errors are considered for input signals of the ESO to estimate “total disturbance” of the HRV. By adopting the control scheme of ADRC, not only stability is ensured but also oversaturation is overcome for the HRV system (1).
ADRC for HRV system
In order to achieve the precise attitude control of HRV with nonlinear uncertainty and actuator saturation, an ADRC is designed in this section. The block diagram of ADRC for the tracking errors system (10) of HRV is given as Figure 1. As shown in Figure 1, the ADRC consists of TD, NLESO, and linear state error feedback controller (LSEFC). “S” denotes differential link to get the differential signal
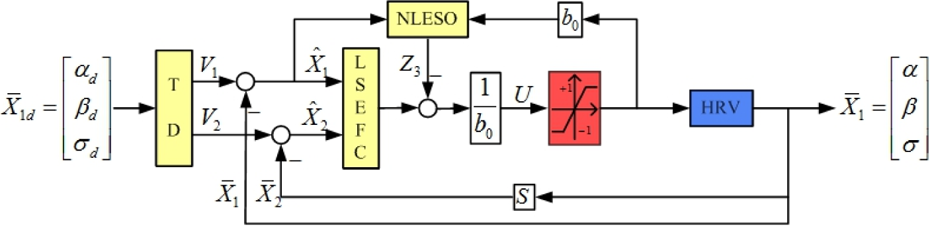
Block diagram of ADRC for the HRV system. ADRC: active disturbance rejection control; HRV: hypersonic reentry vehicle.
TD for HRV
To avoid tracking error that are too large to damage the HRV system at the beginning or to avoid sudden change in reference value, TD is applied to arrange a transient process for the reference signal. By arranging the transient process, smooth signal and its corresponding differential signal are obtained. The expression of TD adoption 34 is as follows

where

where
By TD (11), the relational formula is obtained as

Remark 2
The essence of arranging transient process is that changing parameters ξ and h design an angular acceleration signal fhan(⋅) for the reference angular signal
NLESO for HRV
In this subsection, an NLESO is introduced to deal with the unknown nonlinearity of system (10). Note that

where

where

Subtracting (14) from (13), the estimate error system is written as follows

where
LSEFC for HRV
In this subsection, a nonlinear error feedback controller is designed to ensure that the output angle

Denoting

where
Analysis of NLESO and closed-loop system
Convergence analysis of NLESO
The following assumption is to study convergence of the estimated error system (16).
Assumption 1
For



and

hold.
Theorem 1
Consider the estimation error system (16) for an HRV with nonlinear uncertainty and actuator saturation described in (13).
35
Conditions (19), (20), (21), and (22) are satisfied with

where

holds for any ε ∈ (0,ε0).
Proof 1
Let positive definite function V1(η) be a candidate Lyapunov function of the estimation error system (16). By conditions (19), (20), (21) and (22), the following differential form of first order for V1(η) is given as

From

Equation (23) is rewritten as follows

By solving the differential equation (24), one has

The relational expression (15) between ηi and
where
The right-hand side of equation (25) shows that ∥η∥ → 0 as ε → 0. From equation (26),

holds for any ε ∈ (0, ε0). Based on the above analysis, convergence of the NLESO (14) is demonstrated.
Stability analysis of closed-loop system
For subsequent, denote
Assumption 2
The state feedback ϕ(⋅) is locally Lipschitz constant C0, that is, 35

For any state


and

Lemma 1
Consider the closed-loop system (10) of HRV.
36
Let Ω0 be a compact subset of ℝ3. For any
Theorem 2
Consider the tracking error system (10) of HRV with TD (11), NLESO (14), and controller (18).36 Conditions (27), (28), (29), and (30) are satisfied with

hold to obtain
Proof 2
Considering the condition of Lipschitz for ϕ(⋅) and Lemma 1, controller

There exists 0 < ε2 < ε1 such that
Then equation (31) of
which means that actuator of HRV works in the unsaturation zone, that is, sat(

The right side of (32) indicates that
Simulation results
In this section, some simulation results are given to show the effectiveness of the theoretical results provided in this article. The initial value and desired value of attitude angles are denoted as [12.60°,−11.46°,−27.29°] T and [15°,0°,−30°] T , respectively. Other parameter values of systems (1) and (3) are obtained from the study by Bollino et al. 37 The external disturbances of HRV are denoted as follows

To achieve accurate tracking results and protect the system operating at steady state with actuator saturation, through Theorems 1 and 2, the adjustable parameters of ADRC for HRV system (10) are listed in Table 1.
The parameters of ADRC for HRV with actuator saturation.

ADRC: active disturbance rejection control; HRV: hypersonic reentry vehicle.
The control effectiveness of attitude angles α, β, and σ for HRV system (7) with actuator saturation is shown in Figure 2. As shown in Figure 2(a), the fact output angles α, β, and σ can track the desired angles αd, βd, and σd at about 1.5 s, respectively. The estimations of the nonlinearity and uncertain disturbance on system (10) estimated by NLESO (14) are shown in Figure 2(b). It shows that NLESO has strong ability to estimate the “total disturbances” of the nonlinear HRV system, practically. The controllers of sat(uα), sat(uβ) and sat(uσ) are shown in Figure 2(c), which indicates that actuator saturation appears during the convergence of states.

Effectiveness of attitude angles control for HRV with actuator saturation. (a) Tracking angles; (b) estimations of nonlinearity and uncertain disturbances; (c) control signal. HRV: hypersonic reentry vehicle.
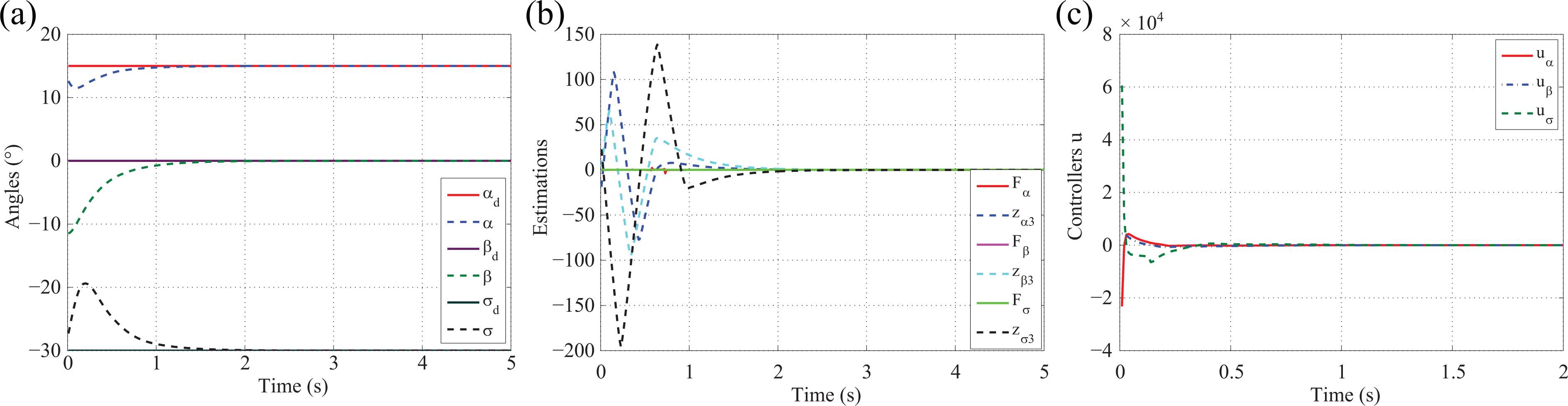
Moreover, the simulation of attitude control for HRV without actuator saturation is also considered in this section. The adjustable parameters of ADRC for system (10) are listed in Table 2. The simulation results of three attitude angles are shown in Figure 3. Figure 3(a) shows that the three attitude angles α, β, and σ can track the desired angles αd, βd, and σd at about 2 s. The estimations of “total disturbances” are shown in Figure 3(b). Moreover, the order of magnitude of control inputs uα, uβ, and uσ to 104 is shown in Figure 3(c).
The parameters of ADRC for HRV without actuator saturation.

ADRC: active disturbance rejection control; HRV: hypersonic reentry vehicle.
Effectiveness of attitude angles control for HRV without actuator saturation. (a) Tracking angles; (b) estimations of nonlinearity and uncertain disturbances; (c) control input signals. HRV: hypersonic reentry vehicle.
The comparison of two simulation results indicates that ADRC has fast and accurate control effectiveness to deal with nonlinearity and uncertain disturbance in HRV system (6) in spite of the presence of actuator saturation.
Conclusions
In this article, the advantage of ADRC is introduced for a nonlinear and uncertain HRV system with actuator saturation. An NLESO is proposed to estimate the nonlinearity and uncertain disturbance of HRV system and compensate with a nonlinear controller in real time. Both convergence of the NLESO and stabilization of the closed-loop system are given. Finally, some simulations have indicated that there are many advantages in using ADRC to deal with uncertainties and nonlinearities for an HRV system subject to actuator saturation.
Footnotes
Acknowledgements
The authors would like to thank the anonymous reviewers for their detailed comments which helped to improve the quality of the paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the National Natural Science Foundation of China (61573301, 61503323, 61603365), the Science Fund for Distinguished Young Scholars of Hebei Province (F2016203148), the China Postdoctoral Science Foundation (2015M571282).