As typical underactuated systems, tower crane systems present complicated nonlinear dynamics. For simplicity, the payload swing is traditionally modeled as a single-pendulum in existing works. Actually, when the hook mass is close to the payload mass, or the size of the payload is large, a tower crane may exhibit double-pendulum effects. In addition, existing control methods assume that the hook and the payload only swing in a plane. To tackle the aforementioned practical problems, we establish the dynamical model of the tower cranes with double-pendulum and spherical-pendulum effects. Then, on this basis, an energy-based controller is designed and analyzed using the established dynamic model. To further obtain rapid hook and payload swing suppression and elimination, the swing part is introduced to the energy-based controller. Lyapunov techniques and LaSalle’s invariance theorem are provided to demonstrate the asymptotic stability of the closed-loop system and the convergence of the system states. Simulation results are illustrated to verify the correctness and effectiveness of the designed controller.
To transfer heavy payloads to the desired location, tower cranes have been widely used in many fields, such as construction sites. Compared with other cranes, tower cranes have the advantage of having a small footprint-to-workspace ratio, and the disadvantage of complicated nonlinear dynamics due to the rational characteristics of the cranes. Like other cranes, tower cranes are typically underactuated nonlinear systems, positioning and sway suppression/elimination are the preliminary task.1–6 Till now, the control issues of tower cranes are still open and challenging.
During the past several decades, many researchers have kept a watchful eye on dealing with the control problem of tower crane systems, and a lot of works have been reported. Two common open-loop controllers are input shaping7–9 and optimal velocity control,10 which are simple and, hence, easy to be implemented in practical applications. However, their control performance might be influenced by external disturbances and parametric uncertainties. To improve the robustness, some closed-loop control methods including gain scheduling feedback control,11 laser-based path tracking control,12 model predictive control,13 recurrent neural network-based control,14 energy-based control,15 and adaptive sliding mode control (SMC) method16 are designed for tower crane systems.
However, the abovementioned control methods completely neglect the hook mass and the distance between the hook’s CoG (center of gravity) and the payload’s CoG, and on this basis, treat the payload swing as that of a single-pendulum. In some situations, the payload mass cannot be neglected, and the payload size is usually large. On this occasion, the payload will rotate around the hook, that is, double-pendulum effects. Compared with the single-pendulum model, the double-pendulum model is much closer to the actual condition. Therefore, although the double-pendulum tower cranes present more complicated dynamics, the study of their control problem is of both theoretical and applied interest. Vaughan et al.17 and Zhang et al.18 using the simplified model, an input shaping controller is proposed to eliminate the residual swing. However, the input shaping method belongs to the open-loop control method, and it is sensitive to external disturbances. Moreover, it needs to assume that the hook and the payload only swing in a plane. In fact, the swing of the hook and the payload is not constrained in a plane, but will deviate from the original swing plane to a sphere, that is, the spherical pendulum. Therefore, we establish the dynamic model for tower cranes with double-pendulum and spherical-pendulum effects first. Then, an energy-based control method with hook and payload sway reduction is proposed. After that, Lyapunov techniques and LaSalle’s invariance theorem are utilized to demonstrate the stability of the closed-loop system and the convergence the states. Finally, simulation results are provided to show the correctness and effectiveness of the designed energy-based controller with hook and payload sway reduction.
The main contribution of this paper is concluded as follows.
The dynamic model of the tower crane system with double-pendulum and spherical-pendulum effects is established, which provides a model for realizing positioning and sway reduction control.
The proposed controller is simple; therefore, it is easy to be implemented in practical applications.
This paper is organized as follows. The dynamics of tower crane systems with double-pendulum and spherical-pendulum effects are described in section “Dynamic model of tower crane systems with double-pendulum and spherical-pendulum effects.” In section “Energy-based controller with hook and payload sway reduction,” energy-based controller with hook/payload swing suppression and elimination is designed. In section “Stability analysis,” stability analysis is provided. Simulation results are given to show the superior control performance of the proposed controller in section “Simulation results and analysis.” Section “Conclusion” gives some concluding remarks.
Dynamic model of tower crane systems with double-pendulum and spherical-pendulum effects
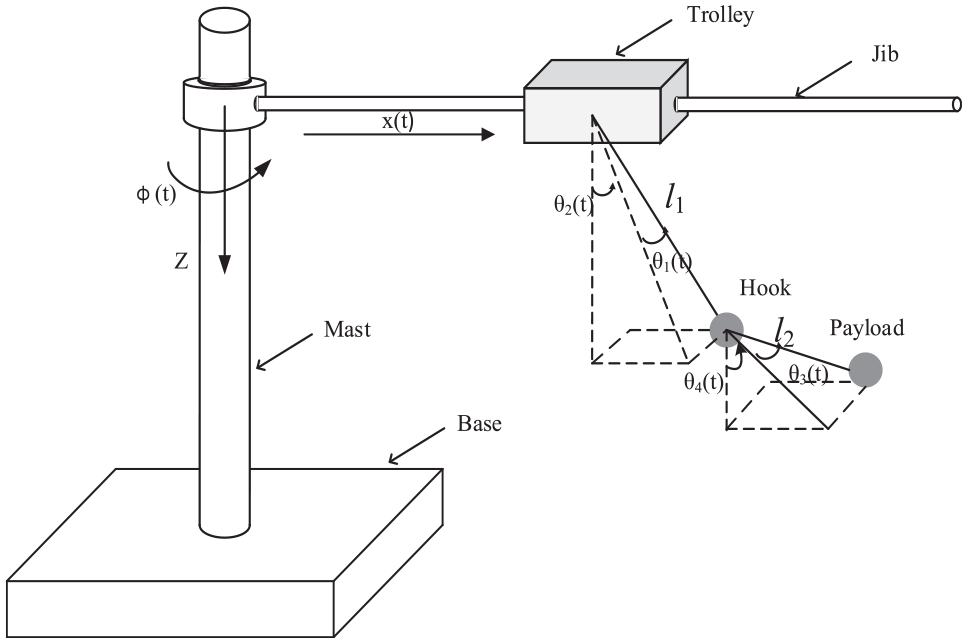
In this section, the dynamic model of the tower crane system with double-pendulum effects is established. Figure 1 gives the schematic diagram of tower crane systems with double-pendulum effects. As can be seen from Figure 1, the position vectors of the trolley, the hook, and the payload can be obtained as
where x represents the trolley displacement; and denote the distance between the trolley and the hook, and the distance between the hook and the payload, respectively; and , , , , , , , and stand for the abbreviations of , , , , , , , , and , respectively.
Schematic diagram of tower crane systems with double-pendulum and spherical-pendulum effects.
The angular velocity vector of the tower systems with double-pendulum effects is denoted as
where represents the jib slew angle.
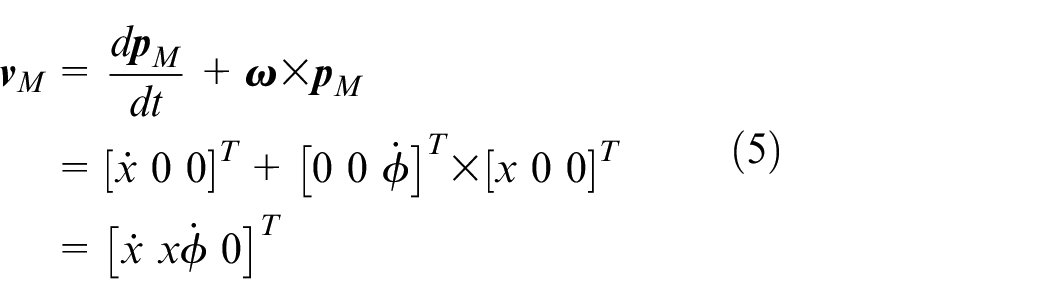
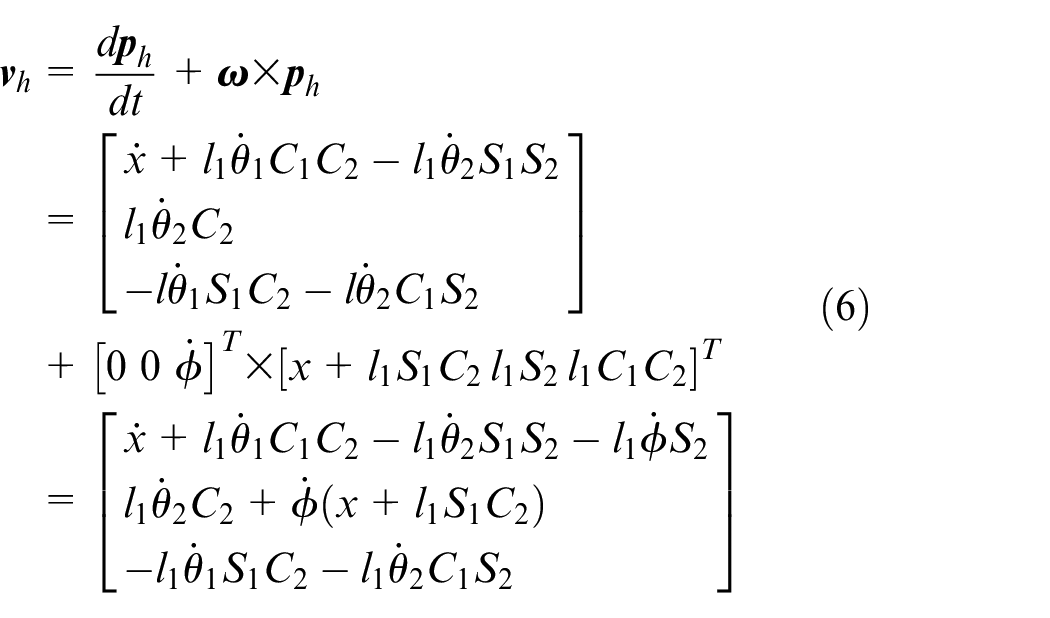
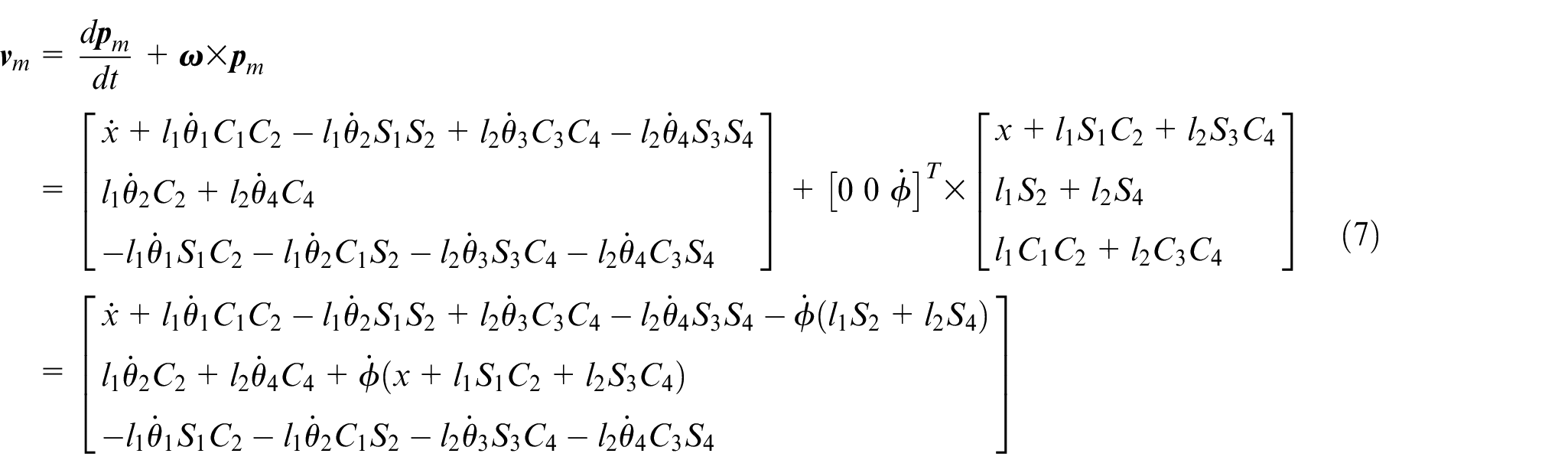
The velocity vectors of the trolley, the hook, and the payload are as follows
The kinematic energy of the tower crane systems with double-pendulum effects is given as follows
with J being the moment of inertia of the jib, E standing for the kinematic energy of the system, representing the trolley mass, and and denoting for hook mass and the payload mass, respectively.
The potential energy of tower crane systems with double-pendulum effects is given by
where g stands for the gravitational acceleration and P denotes the potential of the energy.
where M denotes the slew control torque and represents the friction torque.
In a similar way, the following results are obtained as follows
with F represents the translation control force; denotes the friction force; and stand for the abbreviations of and , respectively; and and are air friction-related coefficients. The detailed expressions of and are defined as follows19–21
with , , , and are friction-related parameters.
In practical applications, the payload is always beneath the jib. Therefore, the following assumption is reasonable.
Assumption 1: The payload swing angles satisfy22–24
Energy-based controller with hook and payload sway reduction
In this section, an energy-based controller with payload sway reduction is developed.
The total energy of the system V is obtained as
where q denotes the state vector and stands for the inertia matrix, which are defined as follows
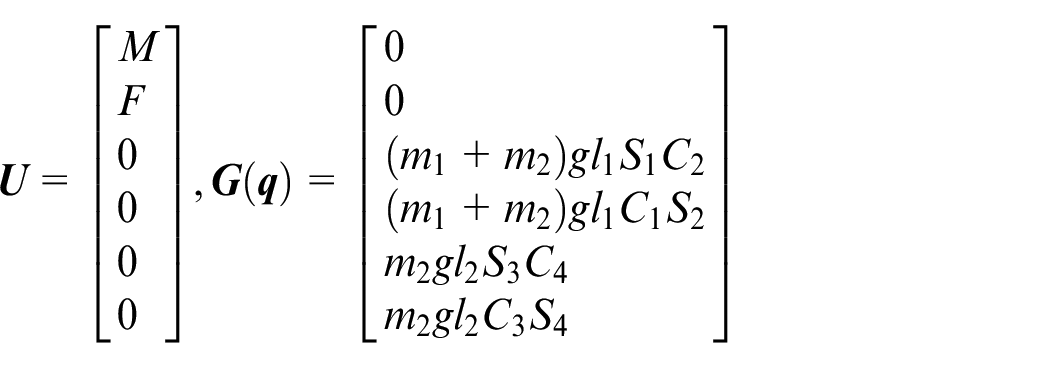
where denotes the centripetal-Coriolis matrix, U stands for the control vector, and represents the gravity vector, and the property 25,26 is used. The detail expressions of U and are given as follows
It follows from equation (25) that the tower crane system with M and F as the inputs, and as the outputs, is passive and dissipative.
According to the structure of equation (25), an energy-based controller is proposed as
where and stand for the error signals, the first terms are used to guarantee accurate positioning, which will be discussed in the subsequent section. They are defined as
where and stand for the jib target angular position and the trolley target position, respectively.
To obtain rapid hook/payload sway suppression and elimination, the hook and the payload swing-related information is added to the designed controller, and by doing so, equations (26) and (27) are improved as follows
Stability analysis
In this section, the stability of the closed-loop system and the convergence of the states are provided. The following theorem summarizes the main results of this paper.
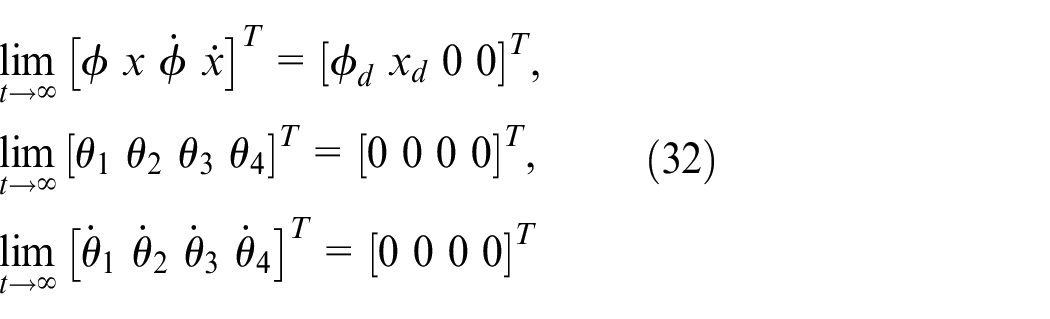
Theorem 1: The proposed method in equations (30) and (31) can drive the jib to desired angular position and the trolley to the desired position, respectively, and at the same time, it can suppress and eliminate the hook and the payload swing, in the following sense
Proof: The following Lyapunov candidate function is introduced
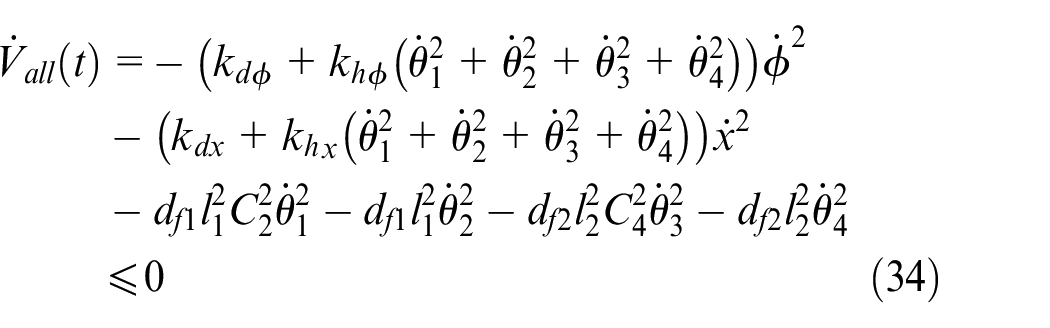
Differentiating equation (33) with respect to time, and substituting the results of equations (25)–(27) into the resulting equation, one has
It follows from equations (33) and (34) that the closed-loop system is Lyapunov stable at the desired equilibrium point,27–29 and it is obtained that
Then, using LaSalle’s invariance theorem,27–29 Theorem 1 can be proven.
Simulation results and analysis
In this section, some simulation results are provided to validate the correctness and effectiveness of the proposed energy-based controller. To this end, two groups of numerical simulation tests are given. In the first group, the proposed controller is compared with the proportional-derivative (PD) controller. Then, the robustness of the proposed controller with respect to sudden changes of payload mass, cable length, and initial payload swings, and external disturbances is verified in the second group.
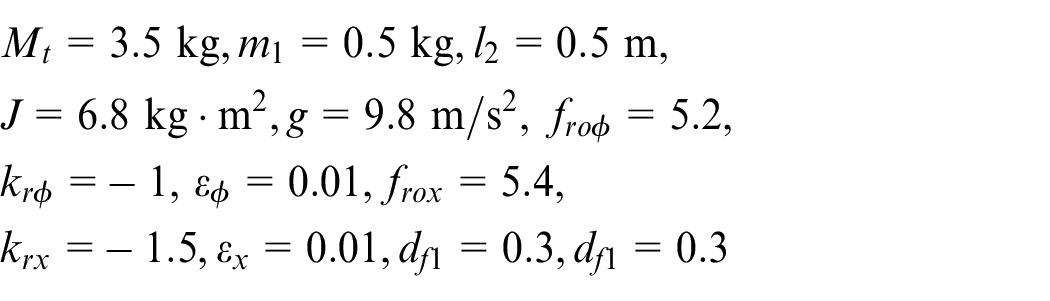
The parameters of the tower crane system with double-pendulum and spherical-pendulum effects are set as follows
Unless otherwise mentioned, , , , , , and are set as , respectively. The target jib slew angle and the desired trolley translation position are set as , respectively.
The initial jib slew angle, trolley translation position, hook swing angles, and payload swing angles are set as , respectively.
Simulation group 1: In this group, to better show the control performance of the proposed energy-based control method with hook and payload sway reduction, we compare it with the PD controller.
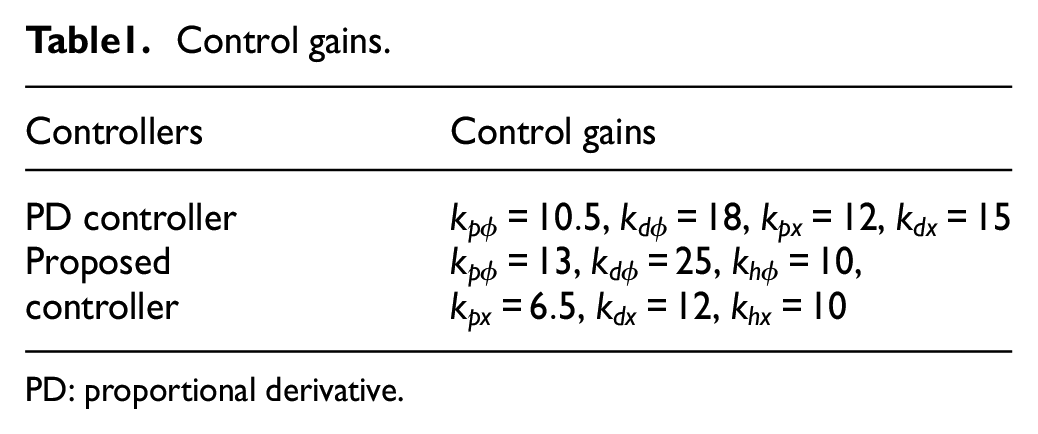
By trial and error method, the control gains of the proposed control method and the PD control method are chosen as shown in Table 1.
Control gains.
Controllers
Control gains
PD controller
, , ,
Proposed controller
, , , , ,
PD: proportional derivative.
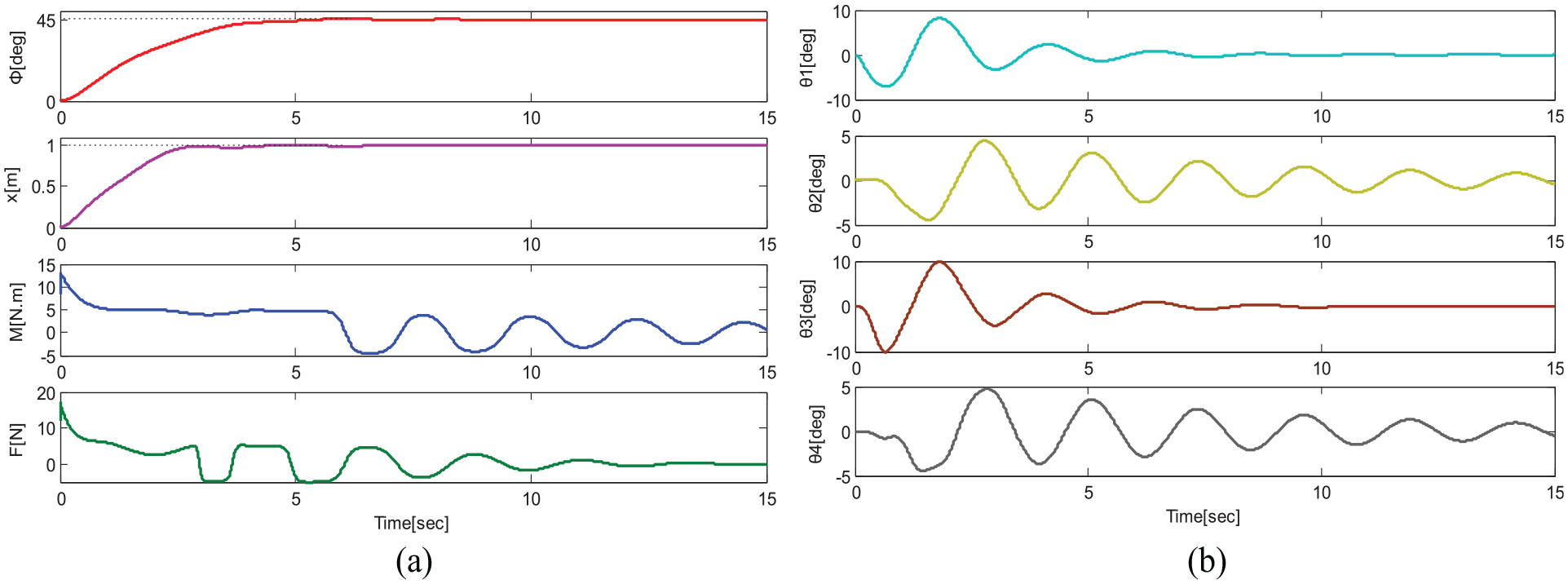
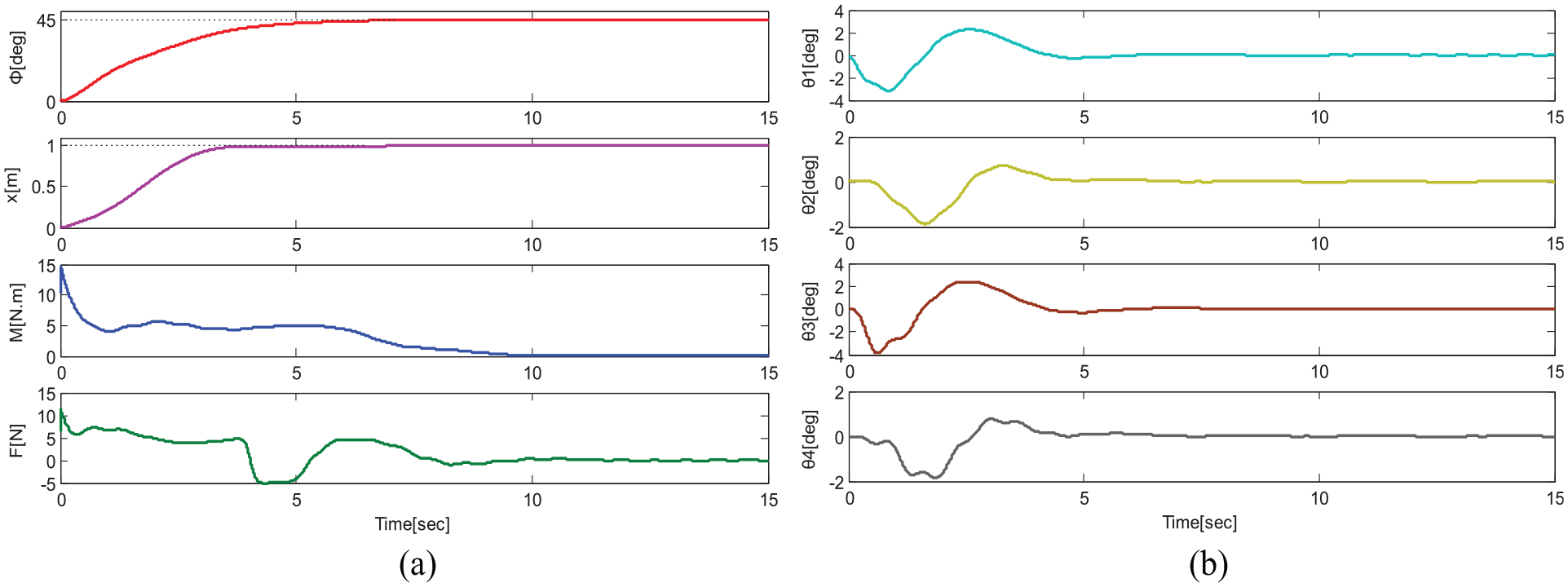
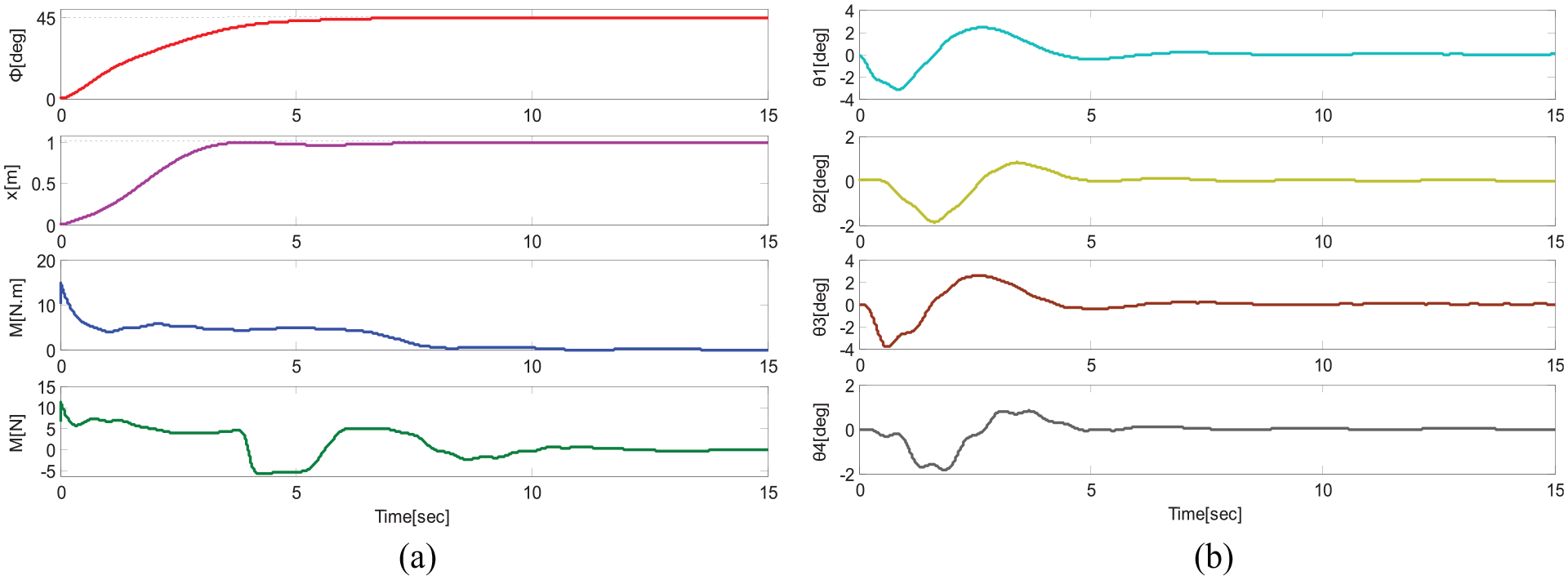
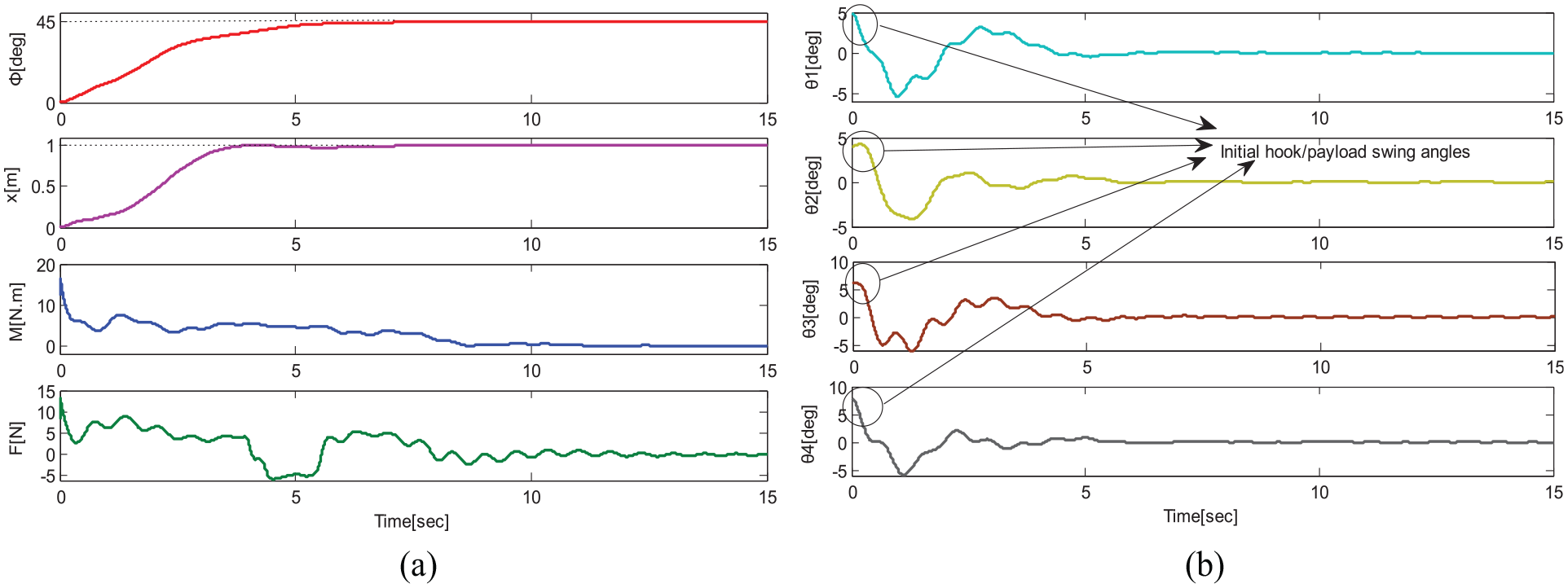
The simulation results are shown in Figures 2 and 3. It is seen that with similar transportation time for positioning (both within 5 s), the proposed energy-based control method with hook and payload sway reduction shows better swing suppression and elimination effects. More precisely, the hook/payload swing angles are suppressed and eliminated within a smaller range by the designed controller (, , , , , , , ) than by the PD control method (, , , , , , , ). , , , represent the maximum swing angles and the residual swing angles.
Simulation group 2: In this group, to further verify the robustness of the designed controller, the following four cases are taken into consideration.
Case 1: Sudden change of the payload mass . The payload mass is changed from 0.5 to 1 kg at t = 3 s, while its nominal value is still kept the same as it in simulation group 1.
Case 2: Sudden change of the cable length . The cable length is changed from 1 to 1.5 m at t = 2 s, while its nominal value is still kept the same as it in simulation group 1.
Case 3: Initial hook/payload swings. The initial payload swing angles are set as , , , and , respectively.
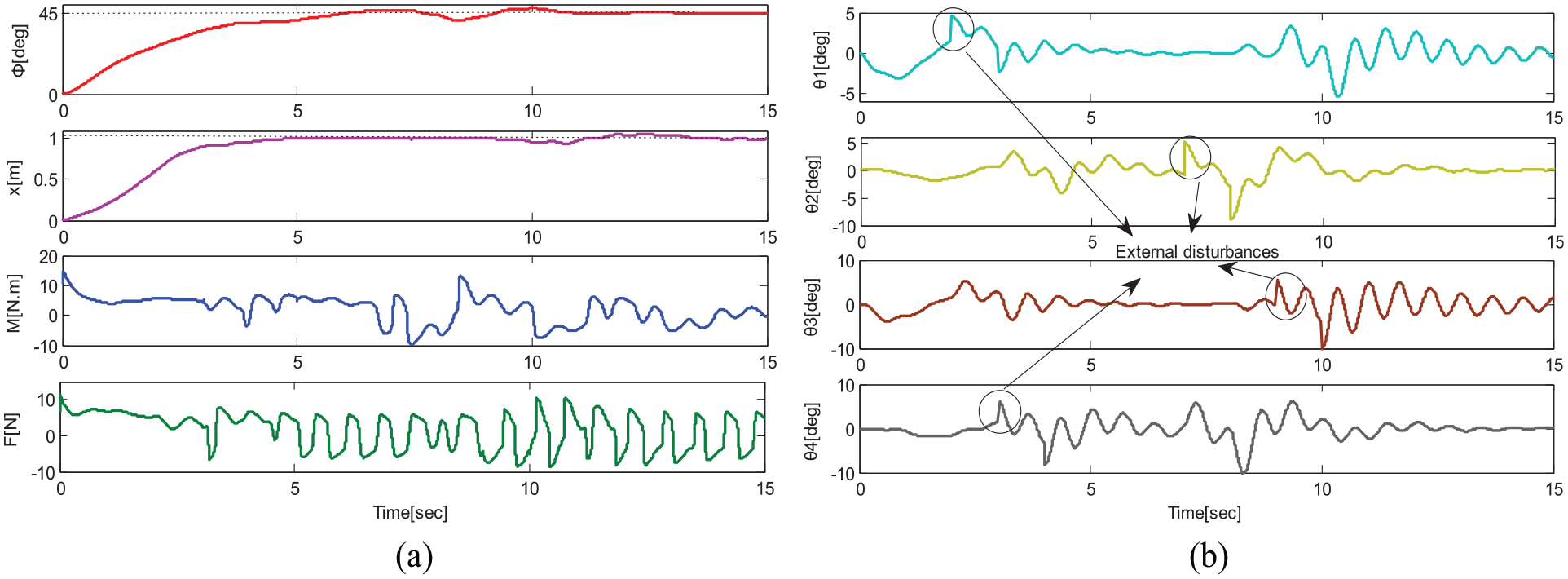
Case 4: External disturbances. To emulate external disturbances, such as winds, various external disturbances are added to the hook/payload swing angles. More precisely, impulsive disturbances with an amplitude of 5 deg are added to between 2 and 3 s, impulsive disturbances with an amplitude of 5 deg are added to between 7 and 8 s, impulsive disturbances with an amplitude of 10 deg are added to between 9 and 10 s, and impulsive disturbances with an amplitude of 6 deg are added to between 3 and 4 s.
Group 1: simulation results of the PD controller (a): the jib slew angle, the trolley displacement, the slew control torque, and the translation control force; (b): the hook swing angles, and the payload swig angles.
Group 1: simulation results of the proposed controller (a): the jib slew angle, the trolley displacement, the slew control torque, and the translation control force; (b): the hook swing angles, and the payload swig angles.
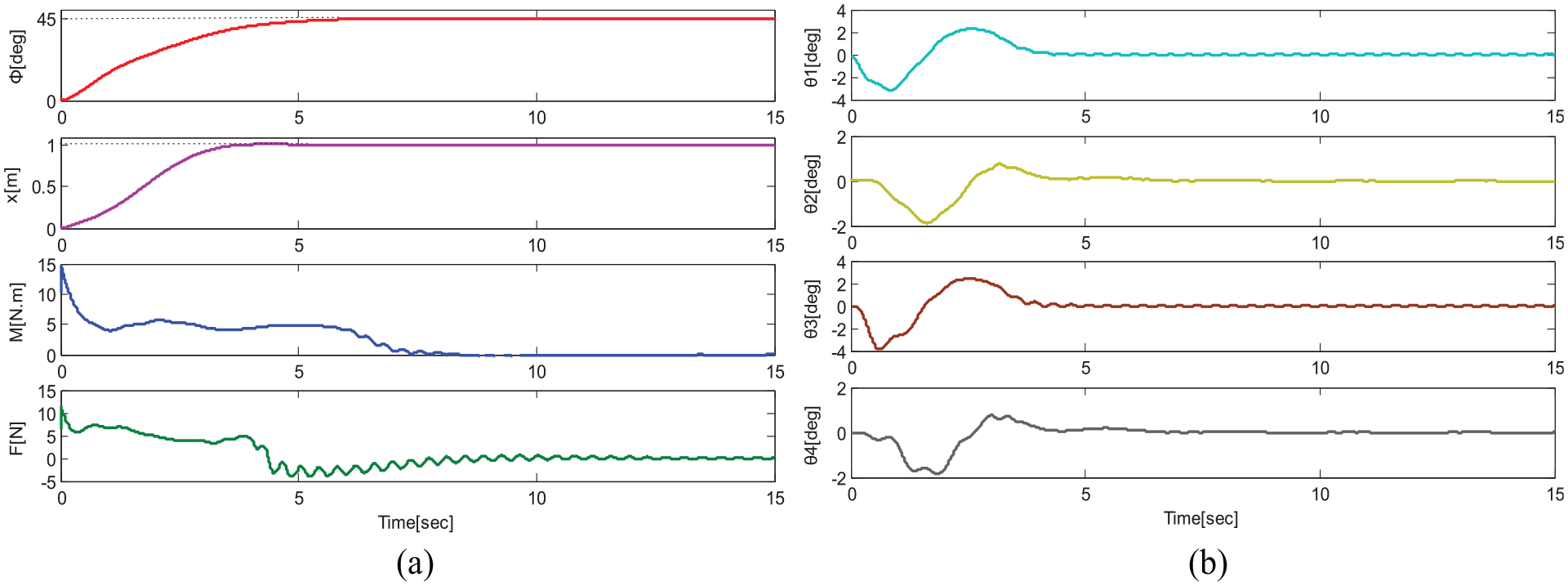
The simulation results for the above four cases are shown in Figures 4–7 in order. By comparing Figures 4 and 5 with Figure 3, it is seen that the overall control performance of the proposed control method, including positioning and swing suppression and elimination, is not affected much by sudden change of the payload mass and the cable length, implying that it is robust with respect to system parameters. It is noted from Figures 6 and 7 that the initial payload swing angles and the unexpected external disturbances are attenuated and damped out by the suggested control method. It can be concluded from the above analysis that the proposed controller shows strong robustness.
Group 2: simulation results of the proposed controller of Case 1. (a): the jib slew angle, the trolley displacement, the slew control torque, and the translation control force; (b): the hook swing angles, and the payload swig angles.
Group 2: simulation results of the proposed controller of Case 2. (a): the jib slew angle, the trolley displacement, the slew control torque, and the translation control force; (b): the hook swing angles, and the payload swig angles.
Group 2: simulation results of the proposed controller of Case 3. (a): the jib slew angle, the trolley displacement, the slew control torque, and the translation control force; (b): the hook swing angles, and the payload swig angles.
Group 2: simulation results of the proposed controller of Case 4. (a): the jib slew angle, the trolley displacement, the slew control torque, and the translation control force; (b): the hook swing angles, and the payload swig angles.
Conclusion
In this paper, using Lagrange’s method, we model the tower cranes with double-pendulum and spherical-pendulum effects. On this basis, the energy-based controller with hook and payload reduction is proposed. We use Lyapunov techniques and LaSalle’s invariance theorem to validate the stability. Numerical results are provided to validate the superior control performance of the designed energy-based sway reduction controller. To the best of our knowledge, it is the first closed-loop method for tower cranes with double-pendulum and spherical-pendulum effects. In our future work, the experimental results will be provided to prove the practical control performance of the designed controller.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflict of interests with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key R&D Program of China under Grant No. 2018YFB1305400, the Key Research and Development (Special Public-Funded Projects) of Shandong Province under Grant No. 2019GGX104058, the National Natural Science Foundation for Young Scientists of China under Grant No. 61903155, and the Natural Science Foundation of Shandong Province under Grant No. ZR2019QEE019.
ORCID iD
Menghua Zhang
References
1.
ZhangM. Finite-time model-free trajectory tracking control for overhead cranes subject to model uncertainties, parameter variations and external disturbances. T I Meas Control2019; 41(12): 3516–3525.
2.
ZhangMZhangYChengX. An enhanced coupling PD with sliding mode control method for underactuated double-pendulum overhead crane systems. Int J Control Autom Syst2019; 17(6): 1579–1588.
3.
SunWSuSXiaJ, et al. Adaptive fuzzy tracking control of flexible-joint robots with full-state constraints. IEEE T Syst Man Cy-S. Epub ahead of print 4 October 2018. DOI: 10.1109/TSMC.2018.2870642.
4.
SunWSuSXiaJ, et al. Adaptive tracking control of wheeled inverted pendulums with periodic disturbances. IEEE T Cybernetics. Epub ahead of print 20 December 2018. DOI: 10.1109/TCYB.2018.2884707.
5.
LiSLiJMoY. Piezoelectric multimode vibration control for stiffened plate using ADRC-based acceleration compensation. IEEE T Ind Electron2014; 61(12): 6892–6902.
6.
MaghsoudiMJRamliLSudinS, et al. Improved unity magnitude input shaping scheme for sway control of an underactuated 3D overhead crane with hoisting. Mech Syst Signal Pr2019; 123: 466–482.
7.
YangTSunNChenH, et al. Neural network-based adaptive antiswing control of an underactuated ship-mounted crane with roll motions and input dead zones. IEEE Trans Neural Netw Learn Syst. Epub ahead of print 6 May. DOI: 10.1109/TNNLS.2019.2910580.
8.
JaafarHIMohamedZShamsudinMA, et al. Model reference command shaping for vibration control of multimode flexible systems with application to a double-pendulum overhead crane. Mech Syst Signal Pr2019; 115: 677–695.
9.
OuyangHHuJZhangG, et al. Decoupled linear model and s-shaped curve motion trajectory for load sway suppression control in overhead cranes with double-pendulum effect. P I Mech Eng C-J Mec2019; 233: 3678–3689.
10.
DevesseWRamteenMFengL, et al. A real-time optimal control method for swing-free tower crane motions. In: Proceedings of IEEE international conference on automation science and engineering, Madison, WI, 17–20 August 2013, pp. 336–341. New York: IEEE.
11.
OmarHMNayfehAH. Gain scheduling feedback control of tower cranes with friction compensation. J Vib Control2004; 10(2): 269–289.
12.
LeeGKimHHLeeCJ, et al. A laser-technology-based lifting-path tracking system for a robotic tower crane. Automat Constr2009; 18(7): 865–874.
13.
BöckMKugiA. Real-time nonlinear model predictive path following control of a laboratory tower crane. IEEE T Contr Syst T2014; 22(4): 1461–1473.
14.
DuongSCUezatoEKinjoH, et al. A hybrid evolutionary algorithm for recurrent neural network control of a three-dimensional tower crane. Automat Constr2012; 23: 55–63.
15.
SunNWuYChenH, et al. Antiswing cargo transportation of underactuated tower crane systems by a nonlinear controller embedded with an integral term. IEEE T Autom Sci Eng2019; 16(3): 1387–1398.
16.
WuYSunNFangY, et al. An increased nonlinear coupling motion controller for underactuated multi-TORA systems: theoretical design and hardware experimentation. IEEE T Syst Man Cy-S2019; 49(6): 1186–1193.
17.
VaughanJKimDSinghoseW. Control of tower cranes with double-pendulum payload dynamics. IEEE T Contr Syst T2010; 18(6): 1345–1358.
18.
ZhangZWuYHuangJ. Differential-flatness-based finite-time anti-swing control of underactuated crane systems. Nonlinear Dynam2017; 87(3): 1749–1761.
19.
SunNYangTFangY, et al. Nonlinear motion control of underactuated three-dimensional boom cranes with hardware experiments. IEEE T Ind Inform2018; 14(3): 887–897.
20.
PanHJingXSunW, et al. A bioinspired dynamics-based control adaptive tracking control for nonlinear suspension systems. IEEE T Contr Syst T2018; 26(3): 903–914.
21.
SunNYangTFangY, et al. Transportation control of double-pendulum cranes with a nonlinear quasi-PID scheme: design and experiments. IEEE T Syst Man Cy-S2019; 49(7): 1408–1418.
22.
LeATLeeSG. 3D cooperative control of tower cranes using robust adaptive techniques. J Frankl Inst2017; 354(18): 8333–8357.
23.
SunNWuYChenH, et al. An energy-optimal solution for transportation control of cranes with double pendulum dynamics: design and experiments. Mech Syst Signal Pr2018; 102: 87–101.
24.
LiCYiJWangH, et al. Interval data driven construction of shadowed sets with application to linguistic word modeling. Inf Sci. Epub ahead of print 12 November 2018. DOI: 10.1016/j.ins.2018.11.018.
25.
SunNLiangDWuY, et al. Adaptive control for pneumatic artificial muscle systems with parametric uncertainties and unidirectional input constraints. IEEE T Ind Inform. Epub ahead of print 19 June. DOI: 10.1109/TII.2019.2923715.
26.
WuZXiaXZhuB. Model predictive control for improving operational efficiency of overhead cranes. Nonlinear Dynam2015; 79(4): 2639–2657.
27.
LeeDHKimTWJiSW, et al. A study on load position control and vibration attenuation in crane operation using sub-actuator. Meas Control. Epub ahead of print 16 May. DOI: 10.1177/0020294019847703.
28.
ZhangMZhangYChenH, et al. Model-independent PD-SMC method with payload swing suppression for 3D overhead crane systems. Mech Syst Signal Pr2019; 129: 381–393.