
Abstract
In this paper, aiming at the problem of high-precision trajectory tracking of the gantry welding robot system under the influence of uncertain factors, a composite adaptive fuzzy compensation controller based on the computed torque control strategy has been proposed. The controller is composed of an adaptive fuzzy feedback control strategy and a dead zone adaptive fuzzy control strategy, which realizes high-precision trajectory tracking of the gantry welding robot, improves the solving speed of the control algorithm, and its tracking errors has been reduced. Screw theory and Lie group lie algebra are used to solve the problem of high algorithm complexity of controllers in multi-degree-of-freedom robot systems due to Newton-Euler dynamics modeling. Based on the computed torque control, the adaptive fuzzy feedback control strategy is adopted to compensate for the modeling errors and external disturbances in the gantry welding robot system, and the dead zone adaptive fuzzy control strategy is designed to compensate for the nonlinear dead zone structure with unknown parameters. The Lyapunov equation is introduced to prove the stability of the controller. Finally, the controller designed in this paper is compared with the conventional controller through simulation and experiment on the gantry welding robot platform, which verifies the effectiveness and superiority of the controller.
Keywords
Introduction
The gantry welding robot system is a complex multi-input, multi-output, and nonlinear uncertain system. Dynamic modeling and control strategy design are the basis of high-precision trajectory tracking control. Therefore, how to establish a dynamic equation with low complexity and ensure the robustness of the control system is widely concerned by researchers.1–3
For the dynamic research of welding robots, there are three modeling methods: the Lagrange method, the Newton Euler method, and the Kane method. Zi et al. 4 established the kinematic equations by the DH parameter method, calculated the kinetic energy and potential energy of the system by the analytical mechanics method, constructed the Lagrange function to establish the dynamic equations, and used the dynamic equations established by the Lagrange method to carry out sliding mode control of the welding robot; Song et al. 5 used the Newton Euler method to establish dynamic equations through the recurrence of motion and force, and analyzed the dynamic deformation of the spot welding robot under high speed and heavy load; Liu et al. 6 based on the Kane equations, forward dynamic equations for parallel robots are proposed, and the effectiveness of the equations is verified. The above methods are based on the kinematics established by the DH parameter method for dynamic modeling, since the angular velocity and linear velocity are characterized separately, the corresponding dynamic equations increase sharply when deriving high-order quantities. Compared with the cumbersome joint local coordinate system of the DH parameter method, the exponential product formula based on screw theory has the advantages of simplicity and efficiency. By setting the inertial coordinate system at the base and the tool coordinate system at the end (marked S and T), and using the six degrees of freedom parameters to completely describe the pose relationship between the two adjacent coordinate systems, the disadvantages of the high-order derivation of the DH parameter method can be eliminated.7–10
Lie group lie algebra is used as an analysis tool in modern mathematics, combined with screw theory to characterize the velocity and force. This representation method makes the angular velocity combined with the linear velocity, force, and torque without separate calculation, which can improve the calculation efficiency and make the process expression clearer.11–13 Park et al. 14 established the dynamic equation of the robot by using the advantages of Lie algebra and screw theory in derivation; Huang Xinghua et al. 15 used Lie group lie algebra and screw theory to describe the Newton Euler equation and Lagrange equation, and analyzed the classical two degree of freedom robot as the research object; Yang et al. 16 established concise and efficient dynamic equations based on Lie group lie algebra and screw theory, and carried out dynamic analysis for heavy industrial robots with elastic joints. Applying the above dynamic modeling method to the gantry welding robot system can effectively improve the calculation efficiency of the controller and then improve the tracking effect of the controller.
The trajectory tracking control of the gantry welding robot has been studied and designed based on the theory of dynamic modeling. The Newton Euler equation based on screw theory and Lie group lie algebra is used to obtain a faster solution speed. Due to the strong coupling and nonlinearity of the robot system, it is necessary to improve the traditional control strategy to compensate for the impact of structured and unstructured uncertainties. The structured uncertainty is the changing dynamic parameters, which are caused by the differences in the weight, size, and mass distribution of the robot. The unstructured uncertainty is the unmodeled dynamic parameters, which are caused by the dead zone factors of nonlinear friction in the power transmission system and external disturbances. Scholars have proposed a series of methods to deal with structured and unstructured uncertainties for robots, combining traditional control algorithms such as sliding mode control and computed torque control with intelligent control algorithms such as adaptive control, fuzzy control, and neural network control, and then designing a hybrid control algorithm with complementary advantages to deal with complex working environment.17–19 Wang et al. 20 proposed extended state observer control to deal with uncertain factors to optimize the input torque, and used backstepping control to reduce the jitter in sliding mode control; on the basis of sliding mode control, Wang et al. 21 used a low-pass filter to reduce the high-frequency chattering signal in sliding mode control, and used fuzzy control to simulate the external disturbances and the dynamic uncertain signals, so that the controller could effectively suppress chattering caused by sliding mode control algorithm. Robustness and chattering are a pair of contradictions in sliding mode control, when the system is in the sliding mode stage, it will traverse around the sliding surface, causing chattering and consuming the energy of the control system. However, it is this characteristic that makes sliding mode control maintain a certain robustness. Therefore, the design of sliding mode control should not only consider the dynamic motion quality when the approaching motion reaches the sliding surface, but also make the system state on the sliding surface reach the equilibrium point in a finite time, which leads to the difficulty and complexity of the design of sliding mode control.
As a classical nonlinear traditional control scheme, the computed torque control method has been widely used in robot systems, through nonlinear feedforward control, the output torque is adjusted in real time according to the given trajectory to ensure the trajectory tracking accuracy. Due to the excessive dependence on the accurate system model, it is vulnerable to the influence of the uncertainty in the robot system, and the control accuracy of the trajectory tracking cannot be guaranteed in the robot control.22–26 In order to reduce these uncertainties, Song et al.
27
used the computed torque method to control the system with accurate dynamic parameters, and compensated for the modeling errors and external disturbances based on the fuzzy feedback controller, which ensured the stability of the closed-loop system. Chen et al.
28
designed an adaptive feedforward fuzzy compensator and an adaptive feedback fuzzy compensator to compensate for the modeling errors and external disturbances on the basis of computed torque control, which effectively improved the control performance. Chen et al.
29
used the adaptive fuzzy control algorithm to approximate the modeling errors based on the computed torque control, and designed a robust H
The nonlinear dead zone structure is also included in the unstructured uncertainty of the gantry welding robot system. Under the effect of control input dead zone, the motion becomes more complex and affects the dynamic characteristics and steady-state accuracy of the system.30–32 For dual arm space robots, Zhan et al. 33 proposed the finite time adaptive control scheme and constructed the smooth dead zone inverse to reduce the influence of dead zone nonlinearity; Jiang et al. 34 introduced the smooth inverse adaptive dead zone to compensate for the asymmetric dead zone structure of unknown parameters, which guaranteed a high accuracy tracking in the dual arm robot system. Chen et al. 35 introduced the adaptive fuzzy feedforward compensator and the dead zone adaptive fuzzy compensator respectively on the basis of the computed torque control, and verified the effectiveness of the controller. In order to avoid the limit cycle oscillation caused by nonlinear dead zone factors on the gantry welding robot and cause system instability, it is necessary to consider the influence of nonlinear dead zone factors on the control performance of the gantry welding robot in addition to considering the modeling errors and external disturbances uncertainties.
In this research, we focus on the trajectory tracking control strategy of the gantry welding robot under the influence of uncertain factors, and propose a compound adaptive fuzzy compensation controller based on the computed torque control. The simulation and experimental comparison of the proposed trajectory tracking control schemes on the gantry welding robot platform, the effectiveness and superiority of the proposed control schemes are verified. The main contributions of this paper are as follows:
Using the mathematical tools of screw theory and Lie group lie algebra, combined with the Newton Euler method, the dynamic equation of the gantry welding robot has been established. The angular velocity and linear velocity are mapped to velocity vectors, and the torque and force vectors are mapped to force vectors. Combined with the adjoint representation of Lie group lie algebra, the algorithm complexity of the dynamic equation is reduced, and a simple and efficient inverse dynamic equation has been derived.
Based on the computed torque control of the inverse dynamic equation, the fuzzy algorithm is applied to the online adaptive learning of the feedback errors, which can correct the given target of the system and eliminate the influence of system modeling errors and external disturbances on the trajectory tracking controller in the gantry welding robot system. According to the asymmetric dead zone characteristics of unknown parameters, a dead zone adaptive fuzzy compensator is established to eliminate the influence of nonlinear dead zone factors on the control performance of the gantry welding robot and improve the control performance of the system.
Dynamic modeling
Lie group lie algebra and screw theory
Lie group is a differential manifold operated by a smooth group with geometric symmetry, and it is a finite dimensional smooth popular group. As a smooth manifold, the tangent space at the unit element of Lie group is defined as lie algebra. Three-dimensional rotation group

Where
According to the Chasles theorem, the motion of the link in space can be expressed as rotation around an axis and translation along a straight line. The Lie algebra of three-dimensional transformation group

Where

Where
Adjoint mapping
The transformation relationship between Lie algebra

The sign

The sign

The adjoint operator of

Where

Product exponential formula
As shown in Figure 1, according to screw theory, the relative pose between the links can be expressed as:

Where
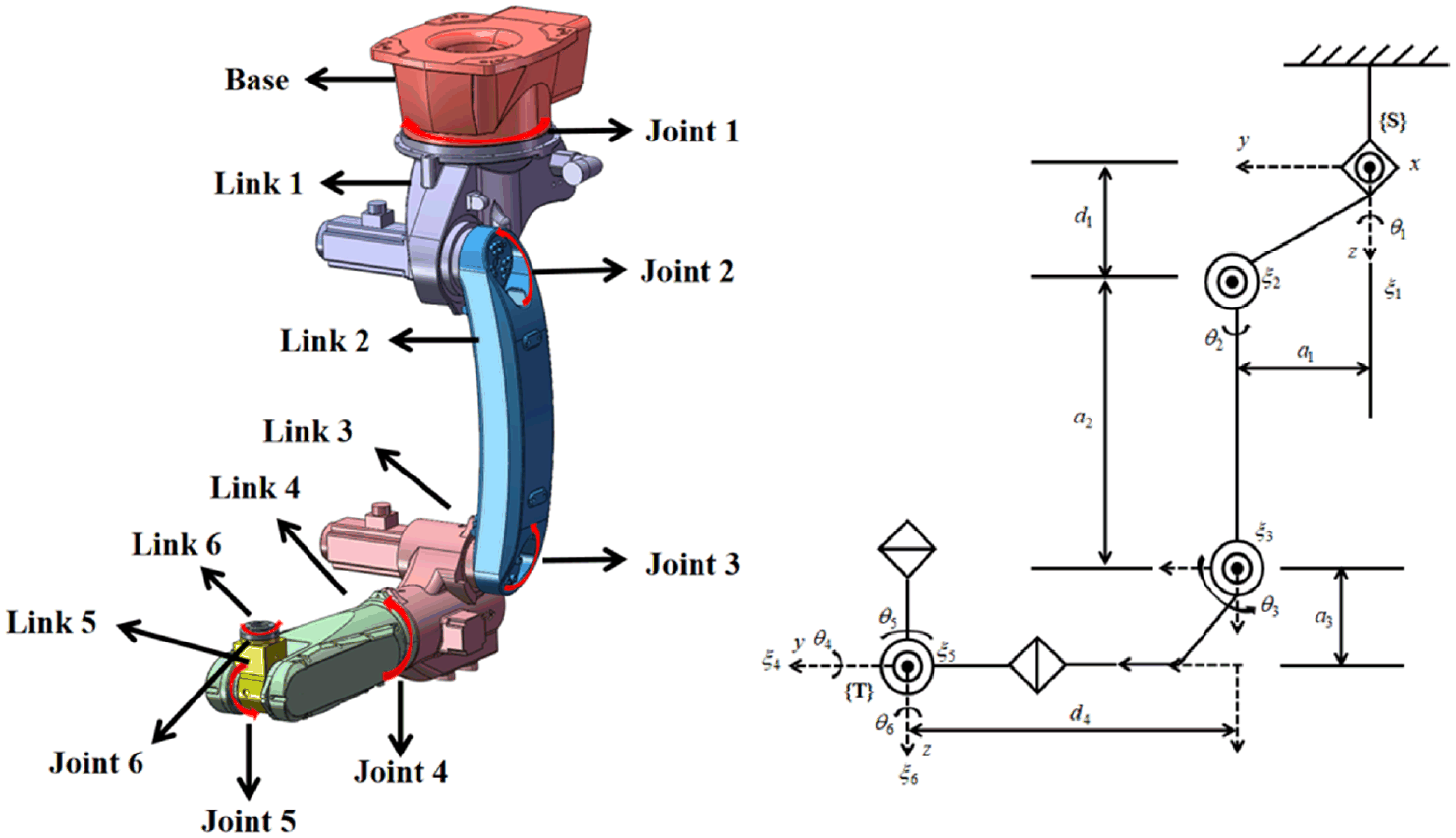
Welding robot and its link coordinate system.
Then the pose of the end of the robot manipulator relative to the base coordinate system is expressed as:

Derivation of dynamic equation
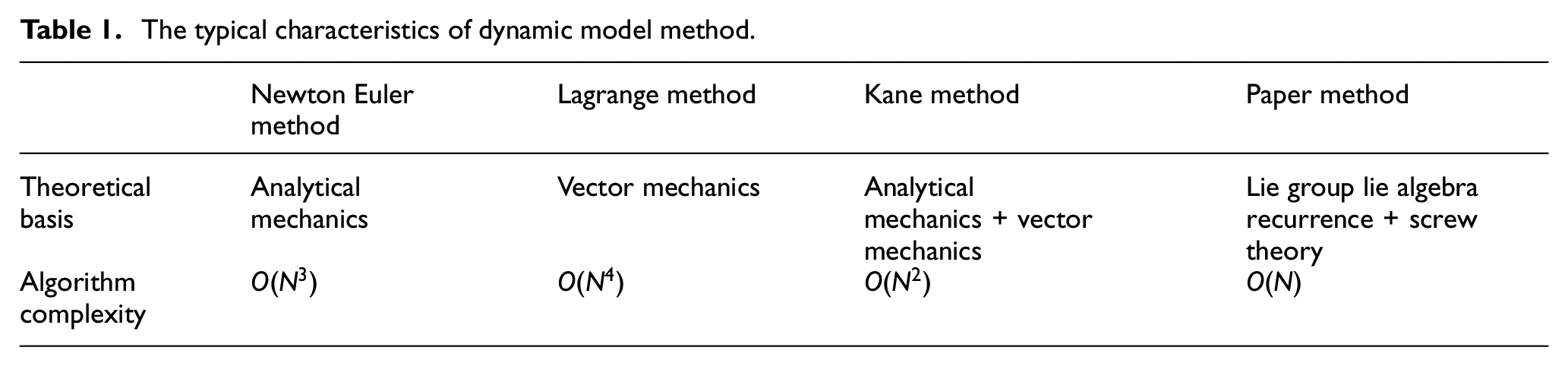
Based on Newton-Euler recursion method, the dynamic equation established by Lie group lie algebra expresses the generalized velocity, generalized acceleration, and generalized force of rigid body through six-dimensional screw, and describes the robot’s motion in a clearer and more concise way by using the geometric properties of screw theory, which greatly improves the efficiency of dynamic modeling. The algorithm complexity of dynamic modeling method is shown in Table 1.
The typical characteristics of dynamic model method.
Derivation of the generalized velocity of the link

Where

From the product exponential formula,

Combined with the adjoint transformation of the Lie algebra, the generalized velocity of link i in the body coordinate system can be expressed:

Derivation of the generalized acceleration of the link
The Lie algebraic expression of the generalized acceleration:
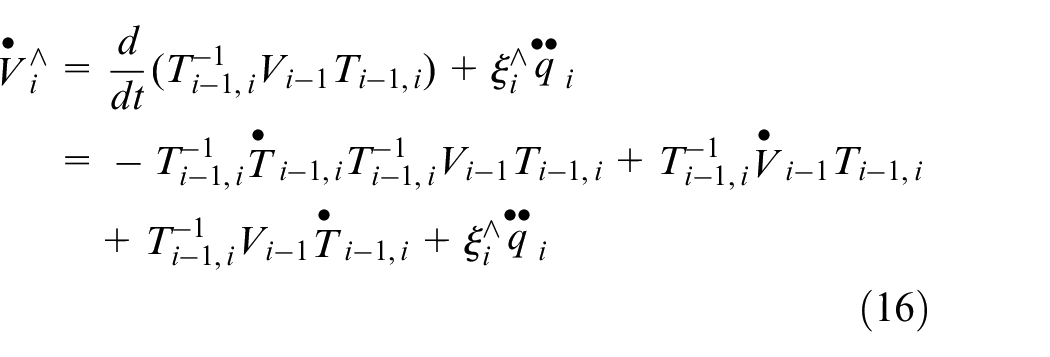
Combined with the adjoint transformation of the Lie algebra, the generalized acceleration of link i in the body coordinate system is:

Derivation of the generalized force of the link
In the body coordinate system {i}, the resultant force acting on link i is:

Where
Then

After the above equation (19) is brought into (18), combined with the properties of adjoint transformation of the Lie algebra, it can be simplified:

Where

Dynamic equation integration
The generalized force and torque of link i are expressed by Lie algebra as follows:


Summarizing the above derived formula, the matrix form of the inverse dynamic equation of the robot is:

Where
Trajectory tracking control strategy
As a strongly coupled and nonlinear robot system, the gantry welding robot is inevitably affected by structured and unstructured uncertainties. In order to improve the robustness of the controller, the adaptive fuzzy feedback control strategy and dead zone adaptive fuzzy control strategy are used to compensate for the structured and unstructured uncertainties. Therefore, considering the influence of structured and unstructured uncertainties in the robot system, the expression of the dynamic equation is:

Where

Where
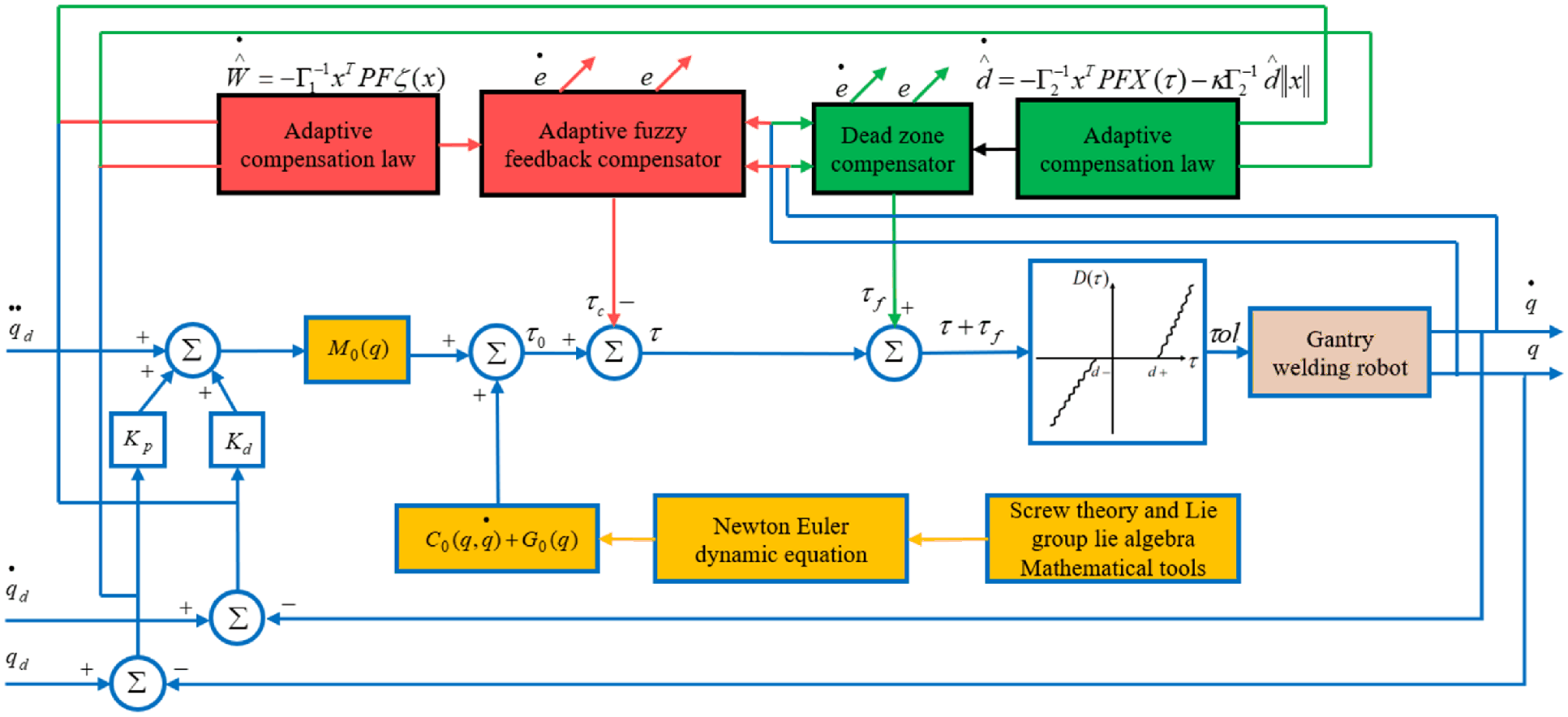
Schematic diagram of control strategy.
Computed torque control method
This section first designs the controller of computed torque control method. Define

The control law of the computed torque control method is:

Adaptive fuzzy feedback control strategy
In this section, the adaptive fuzzy feedback control strategy is designed for the modeling errors of structured uncertainty and external disturbances of unstructured uncertainty. Without considering the influence of nonlinear dead zone structure, the closed-loop control equation of the gantry welding robot system is expressed as:

Where

Where

Where

The ideal value of

In order to reduce the tracking errors of the gantry welding robot, the adaptive fuzzy control law

Where
Dead zone adaptive fuzzy control strategy
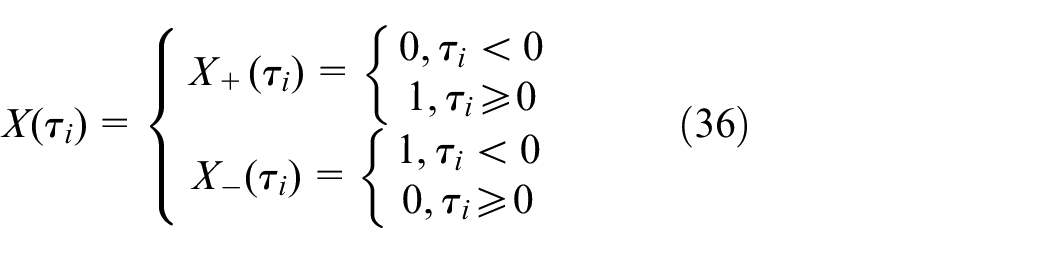
Due to the nonlinear factors of dead zone, the stability of the control system will be greatly affected. If the above controller is directly used, the accuracy of the output of the system will decrease, resulting in a flat top of the dynamic output, and may also produce limit cycle oscillation, reducing the stability of the control system. In this section, the dead zone adaptive fuzzy control strategy is designed for the asymmetric dead zone with uncertain parameters, and the control input after the system input passes through the dead zone structure is defined as:

Where
In order to eliminate the influence of the dead zone factors on the gantry welding robot system, the output of the dead zone adaptive fuzzy compensation controller is:

Where
The ideal value of

Where

Where
Proof of stability
The controller designed in this paper combines the adaptive fuzzy feedback control strategy and the dead zone adaptive fuzzy control strategy respectively on the basis of the computed torque control method. The adaptive fuzzy feedback control strategy compensates for the modeling errors of structured uncertainty and external disturbances of unstructured uncertainty, and the dead zone adaptive fuzzy compensation strategy compensates for the asymmetric dead zone in the unstructured uncertainty. Therefore, the closed-loop error dynamic equation of the controller designed in this paper is as follows:

Define

Where
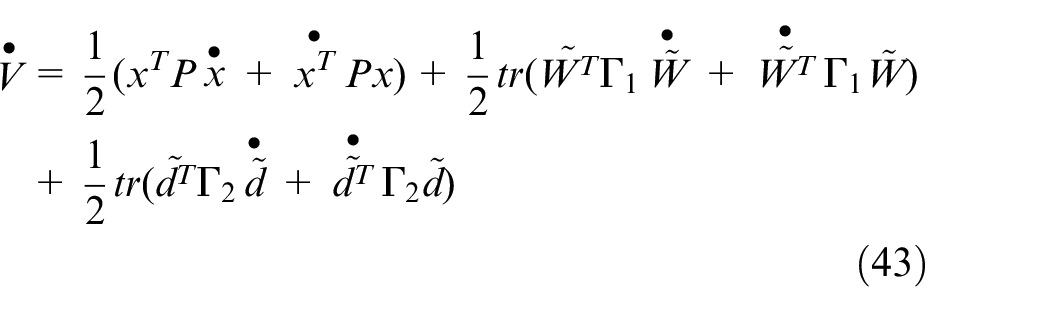
In order to prove that the controller can ensure the stability and satisfactory tracking performance of the closed-loop system, the Lyapunov equation is introduced.

Where
Derivation of time
Bring (41) into the upper, available:
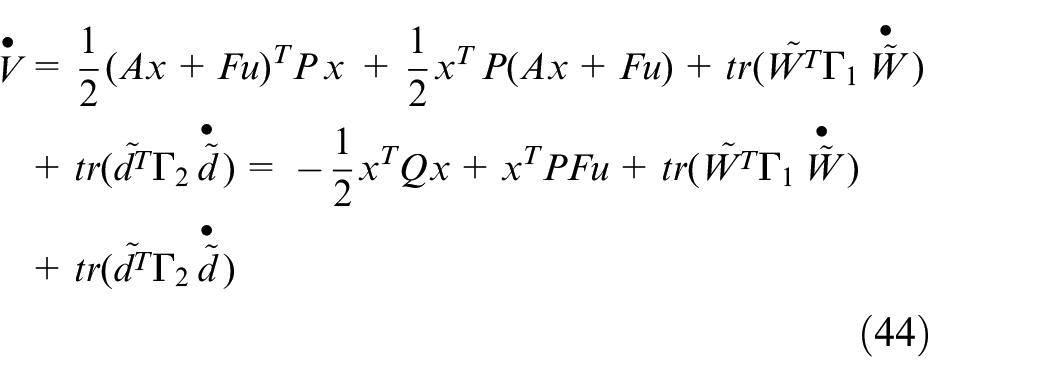
Because
Bring (34) and (39) into the above formula to obtain:

Substitute

Where
In order to satisfy
In order to establish the model, only:

The above formula shows that
Simulation and experiment
In this section, in order to verify the effectiveness and superiority of the proposed control strategy, the gantry welding robot provided by China Shipbuilding Heavy Industry 716 Research Institute is taken as the test object.
Simulation
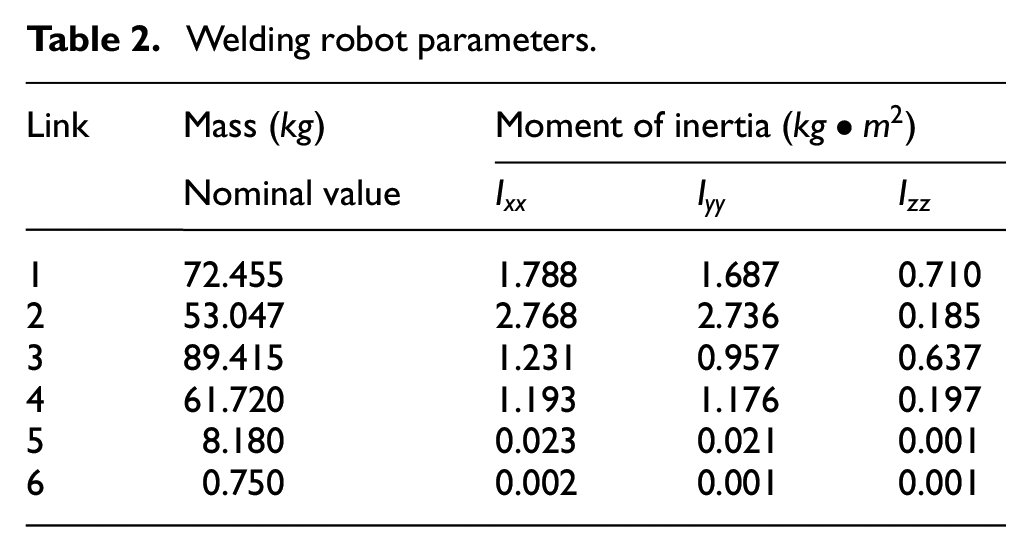
In Dynamic modeling and Trajectory tracking control strategy the dynamic modeling of the gantry welding robot system has been completed, and the adaptive fuzzy feedback control strategy and dead zone adaptive fuzzy control strategy are designed based on the computed torque method to compensate for the structured and unstructured uncertainties. In this section, the gantry welding robot model provided by the China Shipbuilding Heavy Industry 716 Research Institute is used for simulation to test the performance of the designed control strategy (AFF-DZAF-CTC), and compared with the adaptive fuzzy feedback computed torque control strategy (AFF-CTC) and the computed torque control strategy (CTC). The joint parameters of the welding robot are shown in Table 2. Figure 3 shows the scene and simulation interface of the gantry welding robot.
Welding robot parameters.
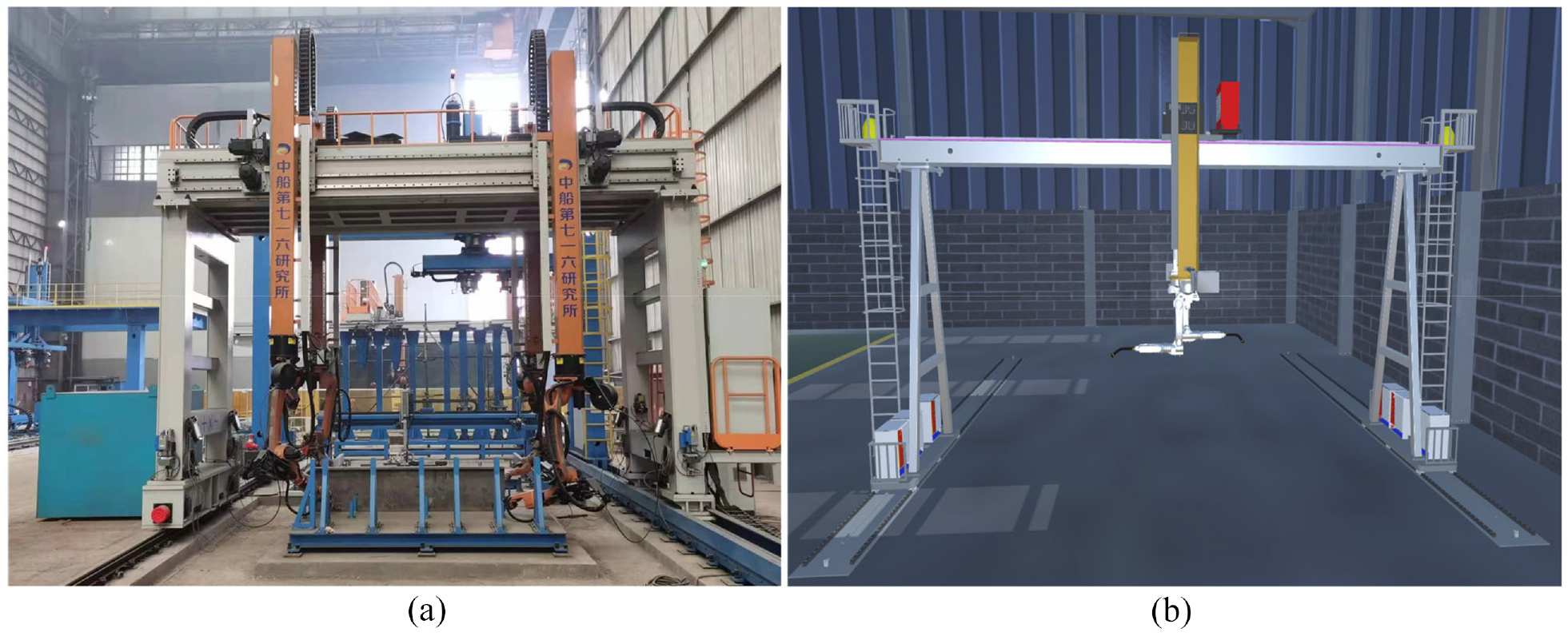
Gantry welding robot: (a) gantry welding robot site and (b) simulation interface.
Because it is impossible to obtain an accurate dynamic model of the gantry welding robot in the process of welding, this paper assumes that
The control parameters in the trajectory tracking controller are selected as follows:
The trajectory tracking strategy simulation experiment of the gantry welding robot has been carried out, and the three control strategies mentioned above are constructed by importing the three-dimensional model into ROS. Taking six joints of the gantry welding robot as the research object, the expected trajectories of six joints are defined as sinusoidal working conditions to simulate the motion state of each joint in the welding process, and the trajectory tracking results of the three control strategies are summarized. Figure 4 shows the simulation process of each joint of the gantry welding robot after a given continuous expected trajectory, and the continuous motion process of each joint from 0 rad to 1 rad.
Welding simulation process: (a)–(d) is the movement process of each joint of the welding robot from 0 rad to 1 rad.
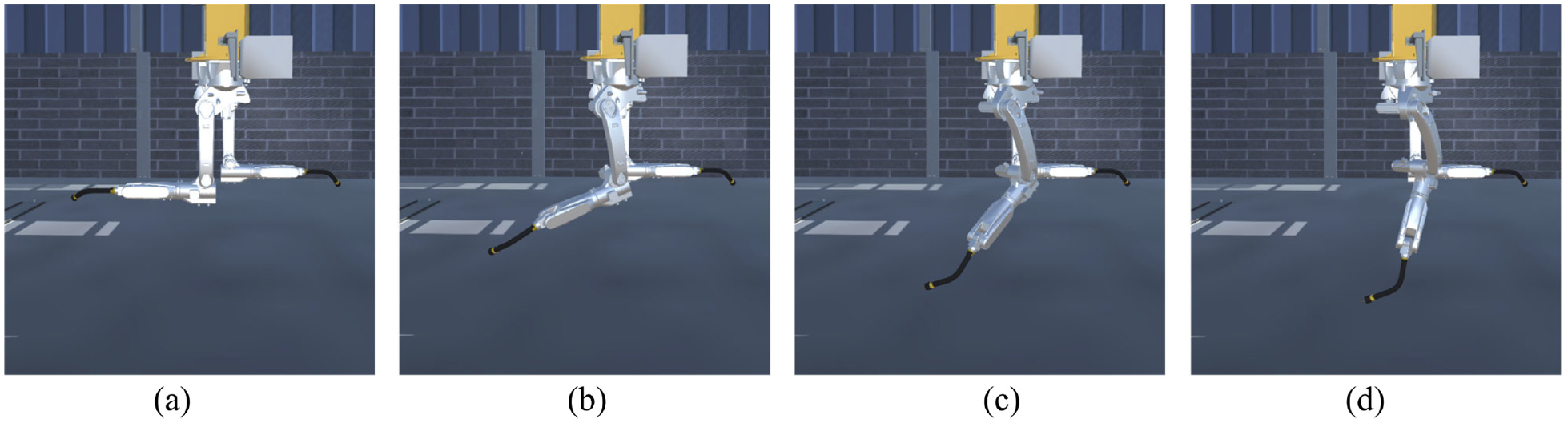
From the results in the Figure 5, the trajectory tracking accuracy and stability of the three control strategies are different under the influence of structured and unstructured uncertainties. Under the continuous signal input, with the increase of time, the control strategy designed in this paper can always follow the input signal stably. However, the errors of the CTC increases gradually with the increase of time, and there is a significant mutation in the angle change, which lead to a sharp increase in the speed or decrease to a negative value, resulting in a significant jitter of the angle change of the gantry welding robot, making the system produce limit cycle oscillation, leading to instability of the system. It cannot meet the requirements of continuous trajectory tracking, but also cause equipment wear to the gantry welding robot. The reason is that CTC cannot maintain the robustness of the controller system under the influence of modeling errors, external disturbances, and nonlinear dead zone. However, AFF-CTC only compensates for the modeling errors and the external disturbances, and does not compensate for the nonlinear dead zone. Therefore, it cannot stably follow the input signal, resulting in large tracking errors. In addition, in the process of real-time solution, the Newton-Euler equation and the Newton-Euler equation expressed by screw theory and Lie group algebra are completely consistent in the solution results, but the Newton-Euler equation does not respond quickly in the solution speed, which will lead to the gradual accumulation of tracking errors in CTC and AFF-CTC due to the limitation of the solution speed.
Angle and angular velocity changes of six joints of gantry welding robot under sinusoidal working condition: (a) joint1, (b) joint2, (c) joint3, (d) joint4, (e) joint5, and (f) joint6.
In order to further reflect the trajectory tracking control performance of the three control methods and evaluate the trajectory tracking effects of different control strategies, the maximum error value and root mean square error value of simulation data are used for error analysis in this paper, as shown in Figure 6.
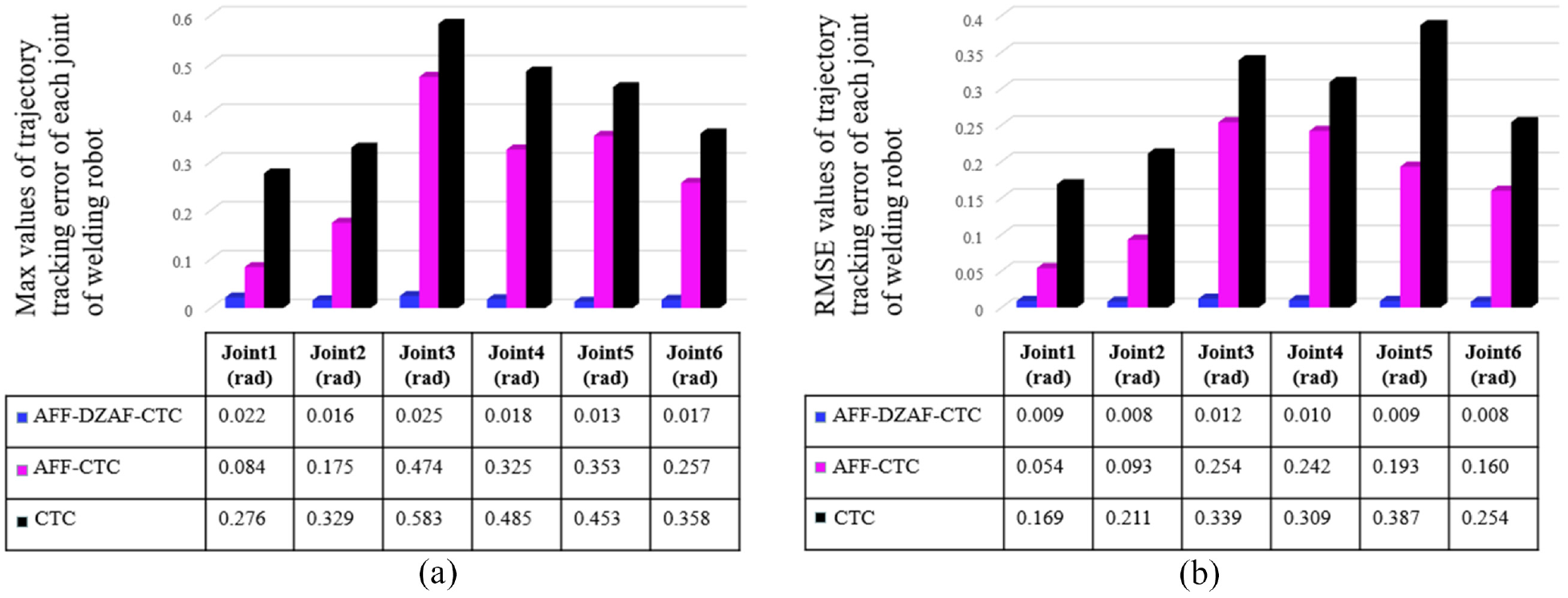
Joint errors of three different control strategies: (a) max values of trajectory tracking error of each joint of the welding robot and (b) RMSE values of trajectory tracking error of each joint of the welding robot.
It can be seen from the error diagram that AFF-DZAF-CTC has small absolute error and root mean square error. According to the above statistical data, AFF-DZAF-CTC has the best control performance. For each joint angle, it has the smallest tracking errors and the smallest fluctuation range.
Experiment
At the welding site, the gantry welding robot is driven by a servo motor to obtain the torque data of each joint of the gantry welding robot, which is transmitted to the computer through serial communication. Figure 7 shows the software platform for trajectory tracking control of the gantry welding robot.
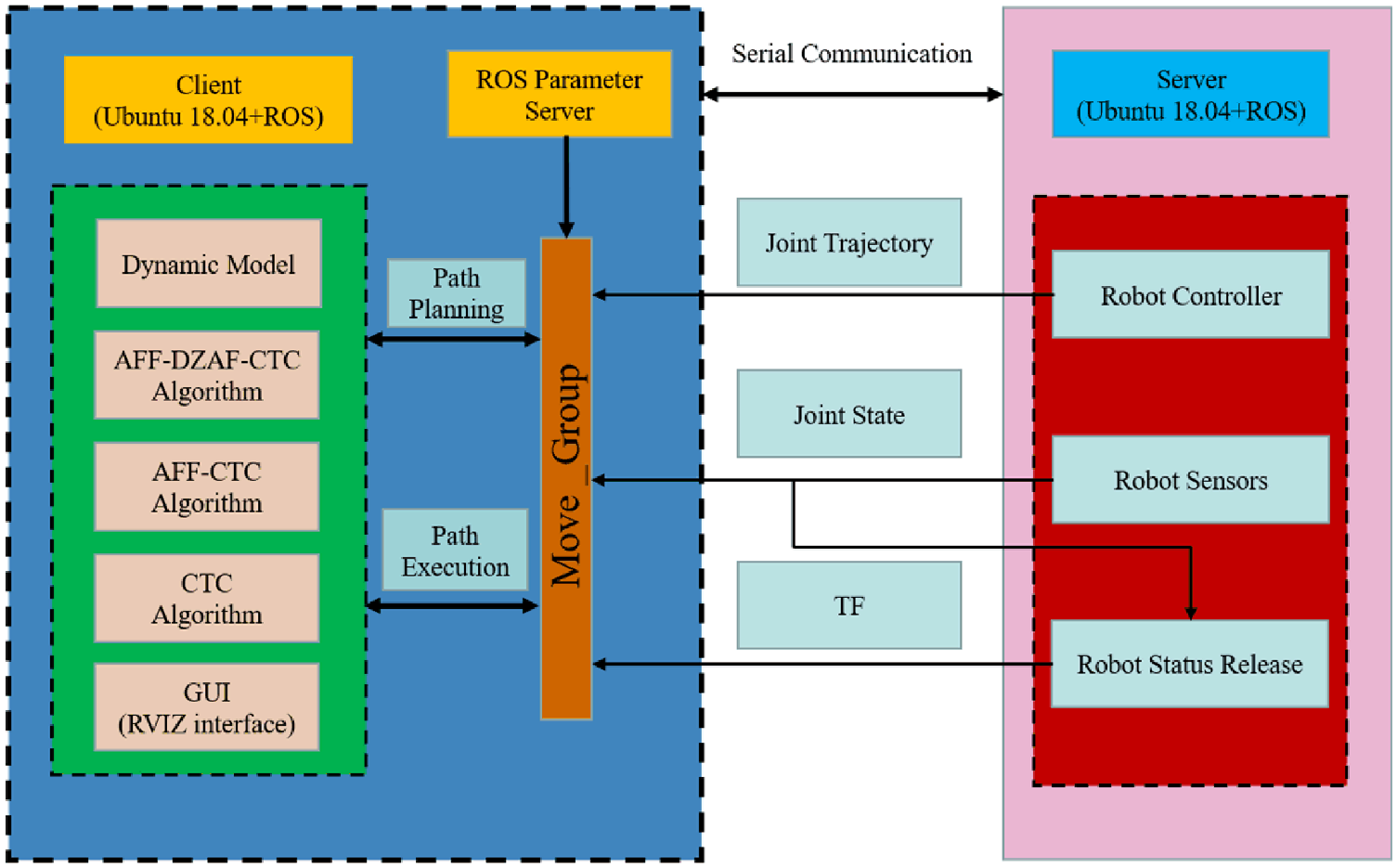
Software platform.
The robot operating system (ROS) under the Linux platform is used to realize the control operation of the gantry welding robot. The client system includes the dynamic modeling and control strategy module. All modules are developed through the API interface provided by the gantry welding robot SDK and ROS. The server system subscribes to the command information sent by the client through the LAN and parses the robot control mode and parameters to the motor controller to drive the joint rotation.
The gantry welding robot is interpolated by quintic spline in the joint space, and the gantry welding robot is made into a URDF file. The trajectory of the end effector of the welding robot is planned through the joint simulation of the RViz and the Gazebo tools. Start the RViz GUI interface, run the corresponding plug-in, write the executable program of three control algorithms using the C # language, and compare the three different control methods, namely CTC, AFF-CTC, and AFF-DZAF-CTC.
Under welding parameters such as welding current, welding voltage, and welding speed are the same, the above three control strategies are verified for the linear welds required for ship welding. Figure 8 shows the comparison of the three control strategies after welding. It can be seen that the traditional CTC method cannot track the desired trajectory stably at the end of the welding robot torch under the influence of uncertain factors, and due to the chattering phenomenon, the appearance of the weld defects and poor forming are caused. From the AFF-CTC welding results, it can be concluded that the system can maintain a certain degree of robustness under the compensation of the adaptive fuzzy feedback control strategy. However, since the adaptive fuzzy feedback control strategy cannot compensate for the nonlinear dead zone structure, when the signal enters the dead zone, the signal information is missing, resulting in weld distortion, which cannot meet the requirements of ship welding. The AFF-DZAF-CTC designed in this paper can effectively eliminate the influence of structured and unstructured uncertainties on the welding robot system, maintain the trajectory tracking accuracy at the end of the welding torch, eliminate the jitter caused by the motion process and improve the robustness of the control system.

Comparison of welding results: (a) CTC, (b) AFF-CTC, and (c) AFF-DZAF-CTC.
Figure 9 shows the joint torque of the end welding torch when the gantry welding robot welds with three controllers. CTC requires that the driving motor has a large initial output torque, which will affect the structure of the driving motor and the welding robot itself, and increase the energy consumption required for welding. Although the AFF-CTC method has fluctuation phenomenon, it is generally smooth and not violent, which can effectively compensate the output torque. However, due to the uncertain dead zone structure of the control input, the control output has a small range of energy intensive jitter, which reduces the performance of the system control system and causes weld distortion. The control torque curve of the AFF-DZAF-CTC method is smoother and the effective value of the torque is reduced, which can eliminate the jitter generated in the control process. Therefore, by contrast, AFF-DZAF-CTC technology has the best control performance among the three control modes.
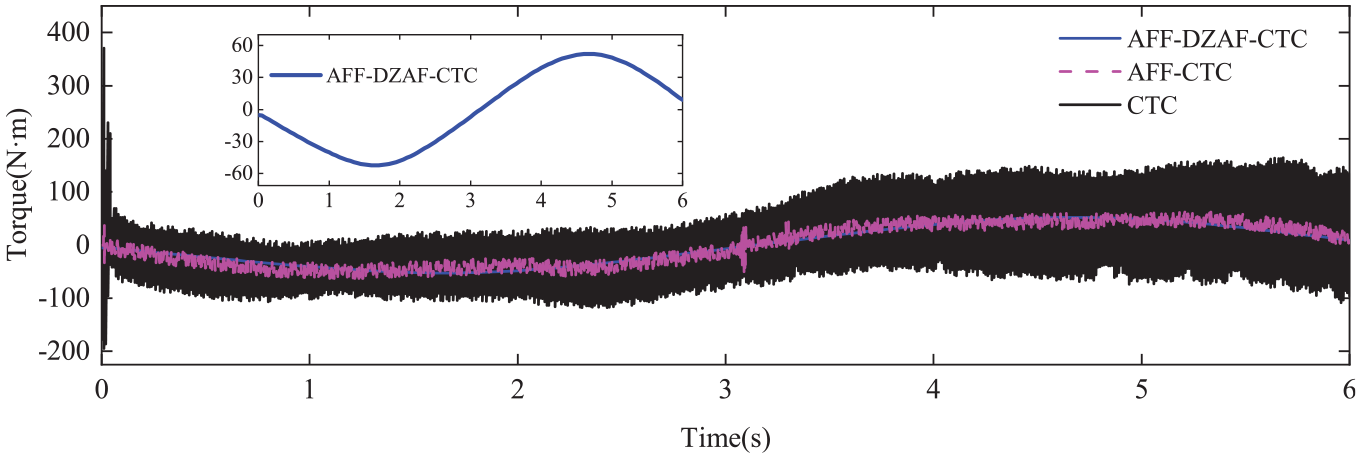
Joint torque comparison diagram.
The experimental results show that the AFF-DZAF-CTC proposed in this paper for the gantry welding robot system has higher trajectory tracking accuracy, lower tracking errors, stronger robustness, and faster solution speed among the three control strategies. At the same time, under the influence of structured and unstructured uncertainties, it eliminates the vibration caused by the computed torque control method, and can better meet the flexibility index of each joint during welding and meet the welding requirements when dealing with higher precision and higher standard welding work.
Conclusion
In this paper, using the mathematical tools of screw theory and Lie group lie algebra, combined with the Newton Euler method, the dynamic equation of the gantry welding robot has been established. Combined with the adjoint representation of Lie group lie algebra, the algorithm complexity of the dynamic equation is reduced, and a concise and efficient inverse dynamic equation is derived. Aiming at the strong coupling and nonlinear gantry welding robot system, the trajectory tracking simulation and experiments of each joint of the gantry welding robot are carried out by combining an adaptive fuzzy feedback controller and a dead zone adaptive fuzzy compensator on the basis of the computed torque control. Through the comparison of three trajectory tracking control schemes, the AFF-DZAF-CTC control strategy designed in this paper can not only improve the computational efficiency, but also effectively eliminate the influence of modeling errors, external disturbance, and nonlinear dead zone factors in the gantry welding robot system. It is of great significance to improve the real-time performance of the robot control algorithm, optimize the mechanical structure design and ensure high-precision operation. It has a certain representativeness and versatility in the field of electromechanical control, and has a wide application prospect. In the future, the cooperative work of the gantry dual-arm welding robot will be studied.
Footnotes
Author contribution
Conceptualization, YX and JY; methodology, HW; software, LC and YJ; validation, HW; formal analysis, HW; investigation, HS, CL, and BZ; resource, YX; data curation, HW; writing – original draft preparation, HW and HS; writing – review and editing, JY; visualization, LC; supervision, YX; project administration, YX; funding acquisition, HS, CL, and BZ. All authors have read and agreed to the published version of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by High-Tech Ship Scientific Research Project from the Minis-try of Industry and Information Technology ([2019]360) and Zhengzhou University Youth Talent enterprise cooperative innovation team support program (32320375).
Ethics approval
The authors hereby state that the present work is in compliance with the ethical standards.
Consent to participate
Not applicable.
Consent for publication
The manuscript has not been published before and is not being considered for publication elsewhere.
Availability of data and materials
The data used to support the findings of this study are included within the article.