
Abstract
To overcome the disadvantages of conventional computed-torque control and fuzzy control, and to exploit their attractive features, this paper proposes two types of adaptive control scheme combining conventional computed-torque control and different fuzzy compensators for the robust tracking control of robotic manipulators with structured and unstructured uncertainties. Fuzzy compensators based on feed-forward and feed-back are developed to compensate these uncertain dynamics. On the basis of Lyapunov stability theory, a tracking error limit is derived for the closed-loop control system and the convergence and stability of the control schemes are proved. Comparisons of their performances with conventional computed-torque controllers under the condition of these uncertainties are carried out. The validity of the two types of adaptive control scheme is shown by numerical simulations of a three-link rotary robot manipulator.
1. Introduction
Robot manipulators with high-speed and high-precision trajectory tracking are in urgent demand in advanced manufacturing fields, such as packaging and assembly of micro-electronic products [1]. High-speed and high-precision mean that the robot manipulator completes pick-and-place operations with good control performance. However, controller design is subject to structured and unstructured uncertainties, which stem from the strong coupled and nonlinear dynamic system of robotic manipulators. Structured uncertainty is characterized by correct dynamic models which contain uncertain dynamic parameters due to the imprecision of the manipulator link properties, unknown loads, inaccuracies of the torque constants of the actuators, and so on. Unstructured uncertainty is characterized by unstructured dynamics resulting from the presence of high-frequency dynamic modes of the manipulator, nonlinear friction, and so on [2]. These uncertainties may have a dramatic effect on a controller's performance and may induce instability. To deal with these uncertainties, some authors [3–5] have proposed several adaptive control schemes, where the adaptive sliding mode control is an effective and popular means of dealing with the parameter variations and external disturbances. Kuo [6] also proposed a novel adaptive fuzzy sliding mode control method, where fuzzy rules effectively alleviate the input chattering. In order to compensate the friction force, Ohri [7] presented an adaptive fuzzy compensator based on the sliding mode control. Lin and Hsu [8] discussed a direct adaptive fuzzy sliding mode control method, where a fuzzy compensator is used to tune both the premise and the consequence parts of fuzzy rules. Lu [9] revised the adaptation laws of the algorithm discussed by Lin and Hsu [8] and applied it to robotic manipulators. Li [10] presented a new fuzzy sliding mode controller with a fixed-order compensator based on the theory of sliding mode control and fuzzy control. In order to achieve robustness with respect to external disturbances, unstructured dynamics, and model uncertainty properties of muscle-joint dynamics, Kobravi [11] proposed a robust control framework, which is based on the combination of an adaptive nonlinear compensator with a sliding mode control. Zeng [12] presented a fuzzy sliding mode control strategy based on support vector machines, where a fuzzy control algorithm completes adaptability to system disturbance. Zhu [13] designed a fuzzy support vector machine control strategy to reduce the oscillation of the sliding mode control. Although the sliding mode control has the ability to provide high robustness for control systems, undesirable chattering on the sliding surface due to frequent switching can deteriorate control system performances [14]. Another problem of the sliding mode control schemes is that all of the upper and lower bounds of uncertain parameters need to be obtained before the design of the controller. Thus, if the controlled systems have many unknown parameters, the design of the sliding mode controller will become very difficult.
Computed-torque control is one effective model-based control scheme that can offer a large variety of advantages over model-free methods, such as potentially higher tracking accuracy, lower feedback gains, and lower energy consumption [15]. However, it has become widely recognized that the tracking performance of this method in high-speed operations is severely affected by structured and unstructured uncertainties [16]. Fuzzy logic system has also been widely applied to generate auxiliary joint torques to compensate these uncertainties. Song [17] developed a new approach to solve trajectory tracking problems of robotic manipulators through combing computed-torque control and fuzzy control. Although the fuzzy control part in the approach can approximate uncertainties in robotic manipulator, parameters in the fuzzy control part need to be determined and tuned by a complex Lyapunov equation, which will result in a complex controller design. Chen [18] combined the conventional computed-torque control with a fuzzy logic system to improve trajectory tracking performance of an industrial robot. However, because the fuzzy logic rules in the fuzzy control system are determined by some experimental data and designers' experiences rather than the fuzzy adaptive control law, it is very difficult to ensure stability for the general fuzzy control systems with uncertain dynamics. Mohan and Bhanot [19] presented an investigation into three kinds of hybrid fuzzy control algorithms combined with a conventional computed-torque controller. Although performances of a hybrid controller improves appreciably compared to their respective fuzzy or conventional counterparts, the fuzzy controller used in these algorithms is a lookup table-based controller rather than a self-adaptive fuzzy controller, and therefore presents the disadvantage of having to build up the lookup table, which can be a long process.
To overcome these disadvantages and exploit the attractive features of conventional computed-torque control and fuzzy control, this paper proposes two types of adaptive control schemes combining the conventional computed-torque control and different fuzzy compensators for the robust tracking control of robotic manipulators with constructed and unconstructed uncertainties. The stability and convergence of the tracking error are guaranteed by using the Lyapunov method. The experiment is carried out on the first three links of a PUMA 560 robotic manipulator. Numerical simulations are employed to assess the performance of the two types of adaptive controller.
This paper is organized as follows. Section 2 outlines the dynamic modelling of the robot manipulator and the model descriptions of fuzzy logic systems. This is followed in Section 3 by the formulation of the two proposed adaptive controllers. Their performances are verified through computer simulations of a three-link rotary robot manipulator. The results are illustrated in Section 4 along with comparisons between controllers. In Section 5, we conclude with remarks and suggestions for further studies pertaining to the complex control problem.
2. Problem formulation and preliminaries
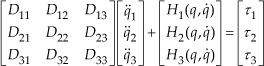
The dynamic equation of a

where the vectors q,q̇,q̈ are the joint angle, the angular velocity, and the angular acceleration, respectively; Diq) is the n × n symmetrical positive definite inertia matrix; H(q,q̇) is the n×1 vector of Coriolis, centrifugal torques and gravitational torque; F(q,q̇) are uncertainties including friction terms and external disturbances, and so on; and τ is the n×1 vector of actuator joint torques.
The robot dynamic Eq. (1) represents a highly nonlinear and coupled system. In most practical cases, the model is not exactly known. Thus, only nominal estimations of the model are available for controller design. Computed-torque control is the most effective approach for robot motion control when a nominal robot dynamic model is available. In this case the control law can be written as

where d̂(q), Ĥ(q, q̇) are estimations of D(q) and H(q, q̇), respectively; Kv and Kp are n×n symmetrical positive definite gain matrices; qd is the desired joint trajectory; e = qd – q is defined as trajectory tracking error vectors.
Substituting Eq. (2) into Eq. (1) yields the following closed loop tracking error dynamic equation in the statespace form:

where
Since there are always uncertainties in the robot dynamic model, the ideal error response cannot be achieved in general. The actual system performance is governed by Eq. (3), which will result in the computed-torque control not being robust in practice. To improve robustness, we introduce a multi-input and multi-output fuzzy logic controller as a compensator for the uncertainties due to friction, disturbance, or payload variation. In this paper, the final output result of a multi-input and multi-output fuzzy system is expressed by the following definition.

where ȳlj is the point in Vj at which fuzzy membership function μBl (yj) achieves its maximum value, which is assumed to be 1; Ail and Blj are the linguistic variables of the fuzzy sets in the subspace Ui and Vj, described by their membership functions
The fuzzy basis function can be defined as
Thus, Eq. (4) can be rewritten as follows:

where ξ(x) = (ξ1(x),…, ξM(x))
T
is the fuzzy basis function vector, and
Then, the overall output of a multi-input and multi-output fuzzy logic system can be rewritten as

where Θ is an (M × m) matrix and Θ j denotes the (M×1) jth column of the matrix Θ.
3. Adaptive fuzzy computed-torque control schemes
3.1 Adaptive control schemes
In this section, two types of adaptive control schemes combining computed-torque controller and fuzzy compensators are designed to compensate the uncertainties. The configuration of the adaptive control scheme based on a feed-back fuzzy compensator (FBC) is shown in Fig. 1. The controller takes the actual commands as the input variables of fuzzy rules, and the error is used to tune parameters of the fuzzy compensator.

Configuration of FBC-based adaptive controller.
The configuration of the adaptive control scheme based on a feed-forward fuzzy compensator (FFC) is illustrated in Fig. 2. At first glance, the FBC-based and FFC-based adaptive controllers have a common adaptive learning concept, that is, the feedback-error is used to tune parameters of the compensator. But a closer investigation reveals their differences in the following areas: (1) the type of training signals; (2) the process of taming dynamic uncertainties; (3) the input parameters of the fuzzy logic system. In both control schemes, the output Φ of the fuzzy compensator cancels out the uncertainties caused by an inaccurate dynamic model. The main difference between the two control schemes is that the input vectors in the FBC-based adaptive controller are calculated as a function of the actual positions and velocities (q(t) and q̇(t)), while in the FFC-based adaptive controller, the input vectors are calculated as a function of the desired positions and velocities (qd(t) and q̇d(t)).

Configuration of FFC-based adaptive controller.
The robot joint torques in the two types of controller are depicted as follows.


where τff and τfb are the joint torques in the FBC-based and FFC-based adaptive controllers, respectively; qd, q̇d are the desired position and velocity; q, q̇ are the actual position and velocity. For the sake of simplicity, the following torque equation is used to represent both schemes (8) and (9):

Thus, the corresponding closed loop tracking error dynamic equation is (under the assumption q ≅ qd in the FFC-based case)

Since the control objective is to generate joint torques Φ to reduce the error signal Ψ in Eq. (11), clearly minimizing the error signal Ψ by the use of fuzzy compensator allows us to achieve ideal computed-torque control directly.
3.2 Fuzzy compensator design
In order to make the joint motions of the robotic system follow the desired trajectories, the computed-torque controller τ0 in Figs. 1 and 2 is connected to the compensator τ
f
to generate a controller signal τ for the robot manipulator. That is, the control law is given by

where τ0 is the output torque of the computed-torque controller, defined as Eq. (2), and τ f is the output torque of the fuzzy compensator.
The Φ in Eq. (11) is defined by an ideal fuzzy logic system as

where ε(x) is reconstruction error of the fuzzy logic system; ξ(x) = (ξ1(x),ξ2(x),…,ξN(x))
T
is the fuzzy basis function vector, and ξi(x) corresponds to Eq. (5); x = (q̇T,qT)
T
is the input vectors of the fuzzy system. Θ* ∈ RN×N in Eq. (13) is an optimal weight matrix and is defined as follows:
where ΩΘ, Θ
x
denote the sets of suitable bounds on Θ and x, respectively, and

Thus, the fuzzy compensator control law τ
f
in Eq. (12) can be defined as follows:
From Eq. (12) and Eq. (16), the tracking error dynamic Eq. (11) can be rewritten as

where
On the basis of the above discussions, the following result can be established by Lyapunov stability theory.
where P is a unique n×n positive definite symmetrical matrix, which satisfies the following Lyapunov equation:

Then, the closed-loop system is asymptotically stable.

The derivative of V with respect to time is given by

From the adaptive control law Eq. (19) and Lyapunov Eq. (20), we can get

Therefore, based on Rayleigh-Ritz theorem 1, we have the following inequality:

The V̇ is negative as long as the term in the brace is positive, which implies

The negative semi-definiteness of V̇ outside the compact set

From Eq. (26), we obtain X ∈ L2. In addition, the boundedness of X implies X ∈ L∞. From Eq. (17) and the boundedness of X,ε, we can get Ẋ ∈ L∞. Due to the facts X, Ẋ ∈ L∞ and X ∈ L2, the result
4. Simulation results and discussions
In this section, we examine the performance of the proposed adaptive fuzzy computed-torque controller through simulations on a three-link rotary robot manipulator gripping an unknown load, shown in Fig. 3. Moreover, we also make a comparison between the proposed controllers and conventional controllers. As shown in Fig. 3, let (x,y,z)
T
denote the position of the end-effector, and the manipulator is modelled as three rigid links (of lengths L1, L2 and L3) with point masses at the distal ends of the links (M1, M2 and M3). Using the conventional Euler-Lagrangian approach, we derive the robot dynamic equation of the three-link rotary robot manipulator as follows:
Three-link rotary robot manipulator.
where


The actual parameter values used for the simulation study are selected as L1 = 0.673(m), M1 = 30.0(kg), L2 = 0.432(m), M2 = 15.91(kg), L3 = 0.432(m), M3 = 11.36(kg). Their corresponding nominal parameter values are assumed as L̂1 = 0.6(m), M̂1 = 20.0(kg), L2 = 0.4(m), M̂2 = 14(kg), L̂3 = 0.4(m), M̂3 = 10(kg). Moreover, a 40kg uncertainty payload is attached to the third link, and coulomb friction and viscous friction forces F(q, q̇) = 80 sgn (q̇) + 10q̇ are added to each joint. The object of the manipulator is to move in a circular way in the horizontal plane following a desired trajectory: xd =0.3 + 0.1 sin (πt), yd = 0.3 + 0.1 cos(πt) and zd =0.7. In the simulation, the initial configuration of the three-link rotary robot manipulator is set as q1 (0) = q2 (0) = q3 (0) = 0 and q̇i = 0 (i = 1,2,3) . To simulate these control schemes of the three-link rotary robot manipulator, the kinematics and dynamic models obtained from Eq. (27) are implemented within the MATLAB environment, and Matlab/Simulink software is used as the simulation tool.
4.1 Comparison studies between adaptive controller and conventional controller
For the purposes of comparison, simulation studies in three cases were conducted, and the tracking performances are described in Figs. 4, 5 and 6.

Tracking performances of three joints where the computed-torque controller takes control action without uncertainties: (a) the first joint; (b) the second joint; (c) the third joint; (d) input torques for three joints.

Tracking performances of the three joints where the computed-torque controller takes control action with uncertainties: (a) the first joint; (b) the second joint; (c) the third joint; (d) input torques for all three joints.

Tracking performances of the three joints where the computed-torque controller plus fuzzy compensator takes control action with uncertainties: (a) the first joint; (b) the second joint; (c) the third joint; (d) input torques for all three joints.
The computed-torque control scheme is designed according to nominal parameters instead of actual parameters. Furthermore, model uncertainties attached to the third link and friction forces added to each joint are also taken into account in the dynamic model. Compared with the first case, it can be easily seen from Fig. 5 (a–c) that the tracking performances in the second case are much worse than in the first case. The evaluation of input torques for the three joints in Fig. 5 (d) displays relatively large oscillations, which might go beyond the limits of actuators. Thus, the conclusion can be drawn that the computed-torque controller with uncertain dynamics will become unstable.
Fig. 6 depicts the tracking performances of the three joints in this case. The fuzzy compensator is used to compensate the uncertain parts ψ = D̂−1 (ΔD(q)q̈ + ΔH(q,q̇) + F(q, q̇)) in Eq. (11) due to uncertainties and external disturbances. The input vector of the fuzzy compensator is defined as X = {xi|i = 1, 2,…,6} = {q1,q̇1,q2,q̇2,q3,q̇3}. The universe of discourse of each fuzzy input is divided into five fuzzy labels, i.e., NB, NS, ZO, PS, PB. The five membership functions are defined as
where Ci are −1, −0.5, 0, 0.5, and 1 as Ai are NB,…, PB, respectively, and σ
i
is equal to 0.2124. The initial values of weight parameters
4.2 Comparison studies between FBC-based and FFC-based adaptive controllers
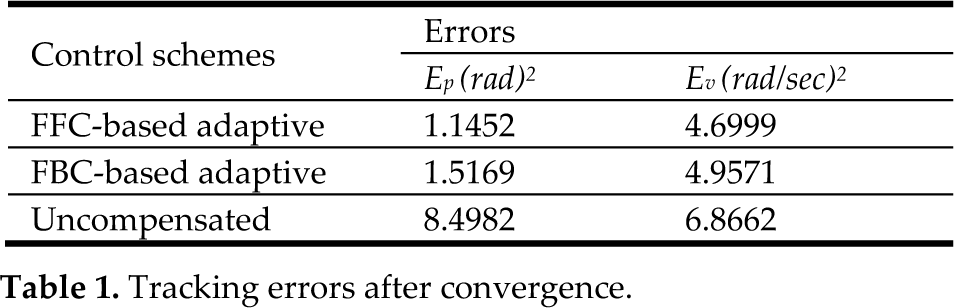
Tracking errors after convergence.

where Ep is the position tracking error; Ev is the velocity tracking error; N is the number of elements of the position vectors; q d i , qi are the desired and actual trajectories, respectively.
As listed in Table 1, there are very clear differences between the three control schemes. The two adaptive controllers demonstrate extremely good control performances compared with the uncompensated case. Moreover, the FFC-based adaptive controller performs slightly better in the circular trajectory than the FBC-based adaptive controllers. The trajectories of the FFC-based adaptive controller and the uncompensated case for one cycle are plotted together in Fig. 7, where the label “A” denotes the trajectory of the FFC-based adaptive controller and the label “B” represents the trajectory of the uncompensated case. As can be seen from Fig. 7, the trajectory of the FFC-based adaptive controller is more close to the desired trajectory.

End point tracking of a circular trajectory for uncompensated and FFC-based control schemes.
5. Conclusions
This paper discusses two types of adaptive control schemes, where feed-forward and feed-back fuzzy compensators are used to compensate modelling uncertainties and external disturbances. Comparisons of their performances with conventional computed-torque controllers under the condition of these uncertainties are carried out. Comparative results demonstrate that the two types of adaptive control schemes are effective in improving control performances in terms of modelling uncertainties and external disturbances. The convergence and stability of the two control schemes are proved by using the Lyapunov method. Computer simulation of a three-link rotary robot manipulator is carried out. Simulation results show that the trajectory tracking errors of the robotic manipulator can be significantly reduced. Further research should be carried out on the more general reduction algorithm of the number of fuzzy rules.
Footnotes
6. Acknowledgments
This work was supported by the National Science and Technology Support Project (grant no. 2011BAF16B01), the teaching research foundation of Shandong University at Weihai (grant no. B2012016), and the Independent Innovation Foundation of Shandong University (grant no. 2012ZRYQ001).