
Abstract
Computed torque control is an effective control scheme for trajectory tracking of robotic manipulators. However, computed torque control requires precise dynamic models of robotic manipulators and is severely affected by uncertain dynamics. Thus, a new scheme that combines a computed torque control and a novel model-assisted extended state observer is developed for the robust tracking control of robotic manipulators subject to structured and unstructured uncertainties to overcome the disadvantages of computed torque control and exploit its merits. The model-assisted extended state observer is designed to estimate and compensate these uncertain dynamics as a lumped disturbance online, which further improves the disturbance rejection property of a robotic system. Global uniform ultimate boundedness stability with an exponential convergence of a closed-loop system is verified through Lyapunov method. Simulations are performed on a two degree-of-freedom manipulator to verify the effectiveness and superiority of the proposed controller.
Keywords
Introduction
Robotic manipulators are multivariable, time-varying, highly coupled, multi-input multi-output systems that are widely used in industrial automation. Computed torque control (CTC) 1 is a well-known and effective strategy in trajectory tracking control of robotic manipulators among numerous control schemes. A CTC can realize the decoupling control of robotic dynamics and achieve a favorable performance in a trajectory tracking task on the basis of feedback linearization. However, a conventional CTC only works well on the assumption that a precise and complete dynamic model of a manipulator, which is impractical, given the presence of structured and unstructured uncertainties, is available. Structured uncertainties indicate that the dynamic model of a manipulator is clear, but its parameters are inaccurate. Unstructured uncertainties are unmodeled dynamics, including gear frictional forces, external disturbance, high-frequency dynamic modes of a robotic manipulator, and joint and link flexibility. These uncertainties may severely affect the performance of a CTC. Therefore, control of robotic manipulators that are subject to uncertainties has a pivotal role in the field of robotics. 2,3
Considerable works on modified CTC schemes for uncertain robotic manipulators have been reported to utilize the attractive features of a CTC and alleviate the effects of these uncertainties. Adaptive approaches 4,5 have been introduced to adapt to the varying environment and improve the tracking precision of a manipulator in the presence of structured uncertainties. Wang 6 proposed two adaptive control schemes to realize the objective of task–space trajectory tracking, regardless of uncertain kinematics and dynamics. However, adaptive control law cannot handle unstructured uncertainties. Shi et al. 7 proposed a simple controller with computed torque-like structure enhanced by integral sliding mode, which is posed as a perturbation estimator. Their research indicated that a sliding mode estimator is effective in addressing structured and unstructured uncertainties. However, this estimator causes undesirable chattering, which can degrade the performance of trajectory tracking.
Several intelligent control strategies have been incorporated to alleviate these uncertainties. Neural network is a modern intelligent tool that has been extensively investigated in controlling robotic manipulators considering their universal function approximation and learning capabilities. Gao et al. 8 employed a radial basis function network to approximate the nonlinear uncertainties that degraded the performance of a CTC simultaneously. Doan et al. 9 proposed a new adaptive synchronized CTC algorithm on the basis of neural networks for three degree-of-freedom planar parallel manipulators. The uncertainties of the control system are adaptively compensated online by a bank of neural networks and error compensators. However, the structures of such neural networks are typically complicated, thereby causing heavy computational burden and difficulties in designing and parameter tuning.
A fuzzy logic system is a universal approximator that can be used to learn lumped uncertainties of robotic systems. Song et al. 10 developed a new approach that combines CTC and fuzzy control (FC) for trajectory problems of uncertain robotic manipulator systems. FC, as a compensator, is used to provide auxiliary joint torques to attenuate the influences of uncertainties. Mohan and Bhanot 11 investigated three kinds of conventional CTC plus adaptive control schemes and conducted a comparative study of their performance. Chen et al. 12 incorporated different fuzzy compensators into a CTC for a robust tracking control of a manipulator and compared their performance under the same structured and unstructured uncertainties. Chen et al. 13 proposed a computed-torque plus robust adaptive compensation control scheme using an adaptive FC algorithm and a robust H∞ control mode to address structured and unstructured uncertainties, respectively. All the aforementioned fuzzy compensators can improve control performance appreciably. However, most of their fuzzy rules are formulated through designers’ experience, which is not constantly useful for different circumstances. Furthermore, a lookup table-based controller may be afflicted with the tedious and cumbersome progress of establishing the lookup table.
Observers have also been utilized to tackle uncertainties. 14 In recent years, a novel observer for compensating uncertainties called extended state observer (ESO) has developed rapidly. Han 15 proposed an ESO to estimate the total disturbance in real time. As a summary of all uncertainties in a system, the total disturbance is estimated as an extended state and compensated in a feedforward way. Wang and Gao 16 compared ESO with two other advanced state observers, that is, high-gain and sliding mode, and concluded that ESO is much superior in handling uncertainties and disturbances. ESO-based control schemes have been widely used in industrial control fields, 17 –20 including robots. 21 –24 However, considerable parameters of a nonlinear ESO that is originally presented by Han is difficult to tune. Moreover, Gao 25 proposed a linear ESO. Linear ESO is essentially a special case of the classic nonlinear ESO. It is convenient to design and has only one tunable parameter that concerns the bandwidth of the observer. Therefore, this ESO is practical.
Nearly all aforementioned applications of ESO in a robotic manipulator control assumed that all of the system knowledge are totally unknown. However, estimating the uncertainties caused by absent model information in complex systems, such as robotic manipulators, is a heavy burden for ESO. Large gains are required to obtain high estimate speed and accuracy, thereby making ESO more sensible to measure noise. If partial knowledge of a robotic system is available, then it can be incorporated into the ESO. Thus, only part of the uncertain model and external disturbances must be estimated. Therefore, the burden of the ESO can be significantly reduced, and the estimation performance can be enhanced.
In this study, a control scheme that combines the conventional CTC and a model-assisted extended state observer (MESO) is proposed for the trajectory tracking control of robotic manipulator systems with structured and unstructured uncertainties. The system can be viewed as two subsystems, namely, a nominal system with a priori knowledge of dynamic model and an uncertain system with all uncertainties and disturbances. The CTC is utilized to handle the nominal system, and the MESO, which serves as a compensator, is used to estimate and eliminate structured and unstructured uncertainties as a lumped disturbance online. The approach fully uses known dynamic knowledge and is convenient to implement. The Lyapunov stability of the proposed controller is analyzed, and the global uniform ultimate boundedness (GUUB) of a closed-loop system with exponential convergence is proved. The effectiveness and priority of the proposed algorithm are demonstrated by simulations on a two-link planar robotic manipulator.
The remainder of this article is organized as follows. The “Problem formulation” section presents the robotic dynamics and formulates the problem. The “Design of the MESO compensator” section designs the MESO for compensating uncertain dynamics. The “Stability Analysis” section discusses the CTC-MESO controller and verifies the stability through Lyapunov stability theory. The “Simulation results” section illustrates the feasibility and performance of the proposed controller through simulations. Finally, the “Conclusion” section summarizes the conclusions drawn from this study.
Problem formulation
According to Lagrangian or Newton–Euler formulation, the dynamical equation of an n-link rigid robotic manipulator with uncertainties can be presented as

where
In this study, the following assumptions are required.
Assumption 1
The desired trajectory
Assumption 2
The joint angular position q and velocity
If

where
The substitution of equation (2) into equation (1) results in a closed-loop system equation as

If kv and kp are selected properly, then the errors will be zero asymptotically.
However, achieving the exact dynamic models of the manipulators is infeasible, and the unmodeled dynamics cannot be ignored in practice. The nominal model is denoted by

where

The substitution of equation (5) into equation (1) yields

where

Here, f aggregates the structured and unstructured uncertainties. Moreover, the presence of f can deteriorate the tracking performance of the conventional CTC and may render the robot system unstable.
To improve robustness, a compensator is designed to eliminate the effects of uncertainties caused by friction, parameter variation, external disturbance, and load variation. The new control law of a CTC plus a compensator can be expressed as

where τ0 is the torque provided by the conventional CTC in equation (5), τc expresses the torque produced by the desired compensator, and

Block diagram of the CTC-MESO control scheme. CTC: computed torque control; MESO: model-assisted extended state observer.
Design of the MESO compensator
A novel observe algorithm called MESO is utilized to obtain a real-time estimation of uncertainties and disturbances.
The MESO is constructed as follows.
We can deduce that

If

where

where
If

where

where

where

The estimation error

If

where

Here, A is Hurwitz.
Lemma 1 26
For any Hurwitz matrix A and t > 0, a positive constant C exists. Thus,

where
Lemma 2
The designed MESO for subsystem (12) is considered, and if

That is, the estimation error of the MESO is bounded within a finite time.
Proof
Solving equation (17) follows that

where t 0 is the initial time. According to lemma 1, we can obtain

where
Thus, we can obtain

The first term decreases exponentially. Therefore, the estimation error is bounded by
We define

where
Let

Remark 1
Lemma 2 shows that the estimation error of the MESO is bounded. A large observer gain ωo indicates a small estimation error. Furthermore, a large gain increases the speed at which the MESO tracks the total disturbance. However, a high gain leads to an increased noise sensitivity. In this study, the dynamic modeling information is incorporated in the MESO, which can reduce the requirement for high observer gains and further enable the MESO to be minimally susceptible to sensor noise.
Remark 2
Lemma 2 is obtained under the assumption that
Following the aforementioned results, the controller (8) can be implemented at present. The architecture of the overall closed-loop system is depicted in Figure 1.
Stability analysis
Let
Lemma 3
Let V(t) be the Lyapunov function of any given continuous time system. 28 If V(t) satisfied the following differential inequality, then

where λ is a positive constant, and

If assumptions 1 and 2 hold, then the following theorem can be stated:
Theorem 1
The robotic manipulator system (1) with uncertainties is considered. If h(t) is bounded, then the control law (8) that combines the CTC and MESO, with equations (13) and (15), can guarantee the GUUB of the closed-loop system.
Proof
Let
We define an error variable

The time derivative of z can be inferred as

The Lyapunov function V is defined as follows

The derivative of Vwith respect to time is

The substitution of the control law (8) into equation (30) yields
where
According to lemma 3, the closed-loop system can be guaranteed to be GUUB. The exponential convergence rate of V is specified by λ. If
Simulation results
In this section, simulations with a two-link planar elbow manipulator 29 demonstrated in Figure 2 are conducted to verify the efficiency and superiority of the proposed controller. The dynamic equation of the robotic manipulator in equation (1) is derived as follows
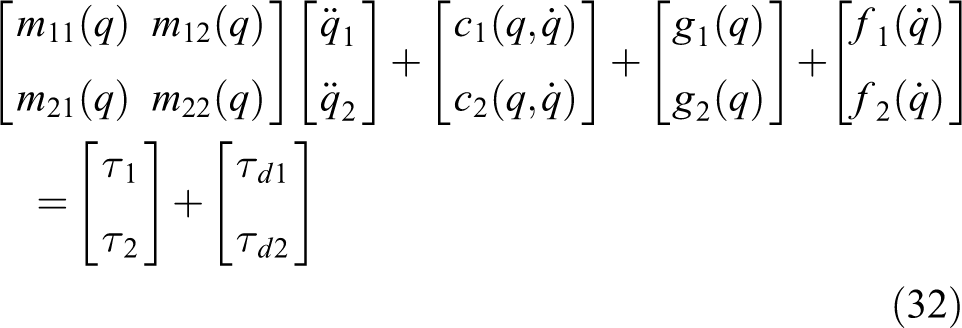
where

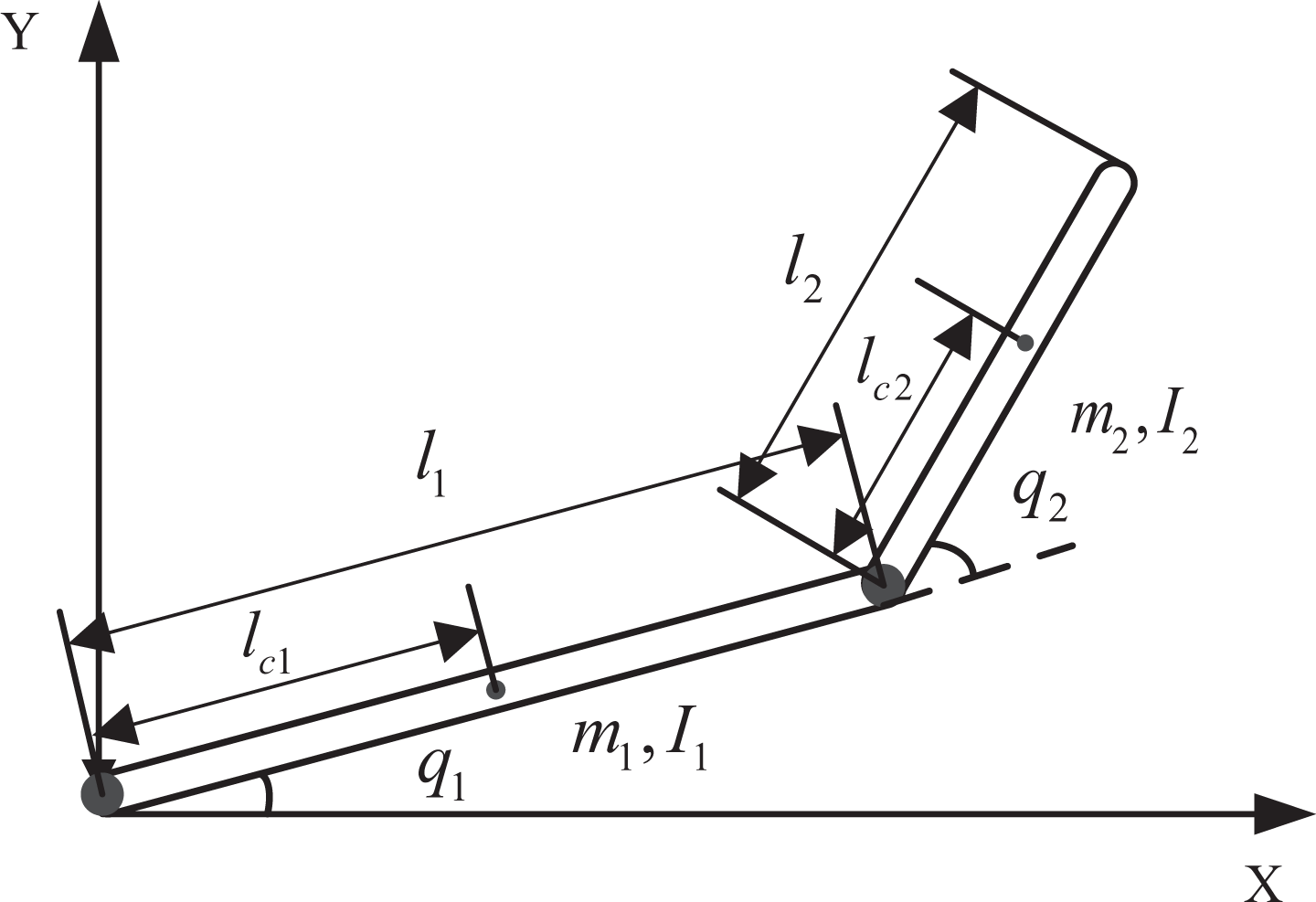
Two-link planar elbow manipulator.
Simulation parameters of the two-link robotic manipulator.

The control objective aims to design a controller to enable the angles of the joints to track desired reference trajectories well while time extends infinitely. The desired joint trajectories are selected as
The following performance indices are applied 30 to evaluate the performance of control laws.
A. Integral of the absolute value of the error (IAE)

B. Integral of the time multiplied by the absolute value of the error (ITAE)

IAE and ITAE are error criteria for evaluating the tracking performance of an entire error trajectory, where Tr is the total running time. The IAE penalizes small errors and increases for positive or negative errors. The ITAE criterion penalizes long-duration errors because time appears as a weighting factor in the criterion.
1. Trajectory tracking without parameter uncertainties or external disturbances
In this case, the conventional CTC is applied to a robotic system without uncertainties. In particular, a precise dynamical mode is assumed to be obtained. In addition, external disturbances and friction forces are negligible. The control law is obtained as

The designed parameters are selected as
Figures 3 and 4 exhibit the position tracking errors and requested control input torques, respectively. The position tracking error converges to zero immediately after a transient given errors in initial configuration. Thus, the conventional CTC with a precise dynamical model is effective and has a favorable position tracking performance for robotic manipulators without uncertainties. However, uncertainties constantly exist in a practical system, thereby rendering the conventional CTC minimally attractive when a high performance is required.

Position tracking error without uncertainties. (a) Joint 1, (b) joint 2. CTC: computed torque control.
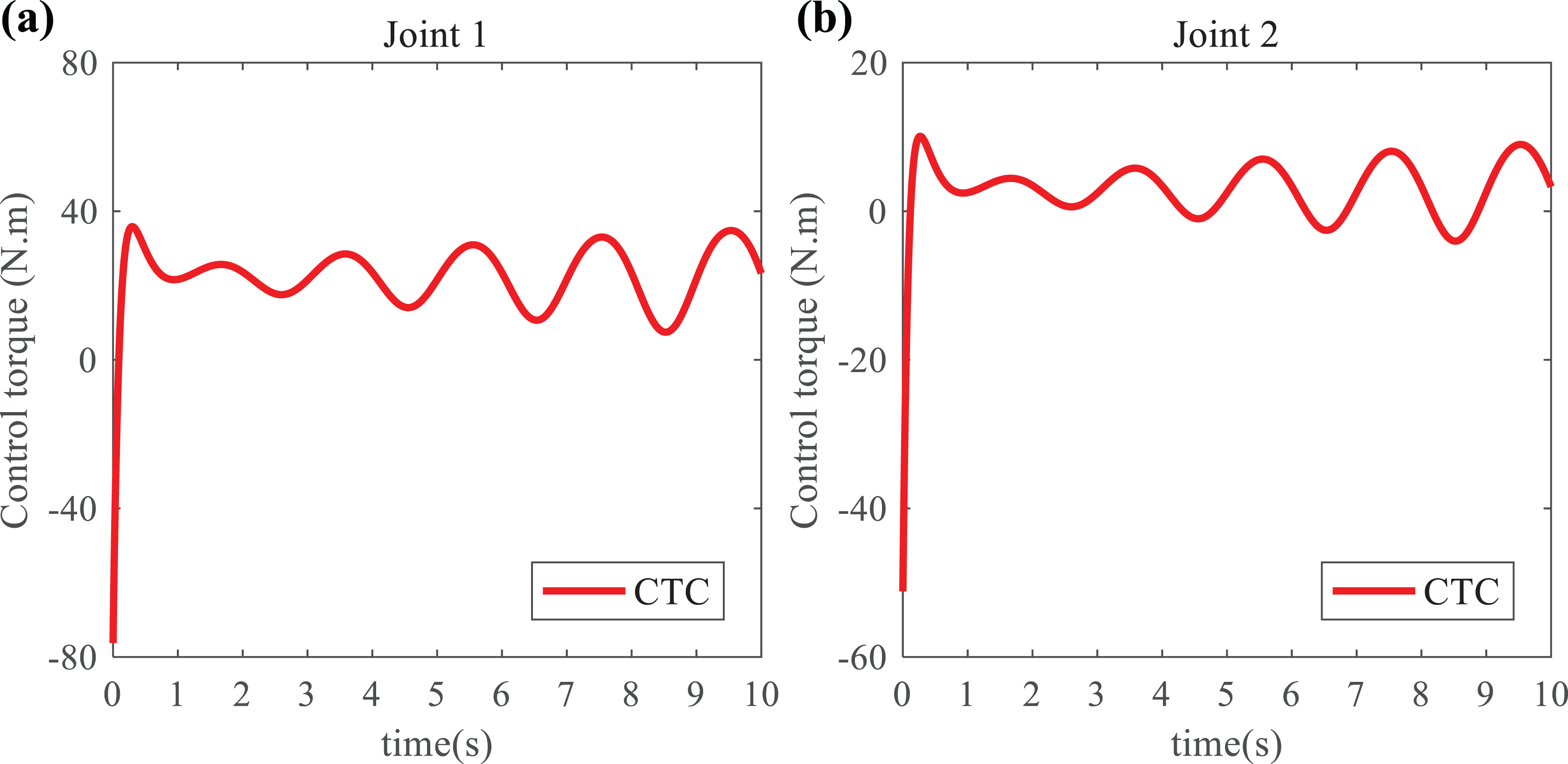
Control torque without uncertainties. (a) Joint 1, (b) joint 2. CTC: computed torque control.
2. Trajectory tracking with parameter variations and external disturbances
In this condition, five control laws for the following cases are applied to the robotic manipulator with uncertainties for comparison.
In contrast to a previous case, these controllers are designed using nominal rather than actual parameters, and a friction force is attached to each joint, as expressed in equations (32) and (33). Moreover, external disturbances are considered and assumed to be
Case 1
The conventional CTC. In this case, the control law is the same as that in equation (36).
Case 2
The proposed CTC-MESO controller. In this case, the control input torque can be obtained by using equation (8).
Case 3
Control without model information. In this case, the control law is the same as that in equation (8), but all model information is assumed to be unknown. Letting

The control law can be rewritten as

If all model knowledge is discarded, then the CTC-MESO degrades to a proportional–derivative (PD) controller with acceleration feedforward (PDAF) and conventional ESO compensator. The PDAF can be considered a special type of CTC when the model information is absent. Here, total disturbance f must be compensated increases to

For comparison, parameters kv
and kp
of all controllers are selected to be the same as those in previous cases. The observer gains are selected as
Case 4
A modified CTC called finite-time inverse dynamic tracking controller (FIDC) proposed by Su and Zheng. 32 The FIDC law is obtained by

where
Case 5
A model-free control law called PD with sliding mode control (PD-SMC). 33 The PD-SMC is defined as

where
Figure 5 depicts the position tracking errors when structured and unstructured uncertainties are considered. Figure 6 displays the corresponding control input torques. Figure 5 demonstrates that the performance of the conventional CTC and FIDC are significantly deteriorated, given parameter variations and external disturbances compared with that in the previous case. The CTC and FIDC cannot handle this severe disturbance well, and the tracking errors display relatively large oscillations, which may cause instability of the closed-loop control system, when the value of m
2 changes at

Position tracking error with uncertainties. (a) Joint 1, (b) joint 2. CTC: computed torque control; MESO: model-assisted extended state observer; PD: proportional–derivative; PDAF: PD controller with acceleration feedforward; SMC: sliding mode control; FIDC: finite-time inverse dynamic tracking controller.

Control torque with uncertainties. (a) Joint 1, (b) joint 2. CTC: computed torque control; MESO: model-assisted extended state observer; PD: proportional–derivative; PDAF: PD controller with acceleration feedforward; SMC: sliding mode control; FIDC: finite-time inverse dynamic tracking controller.
The tracking performance is much better in the CTC-MESO controller than other controllers in the transient and steady states. The tracking errors are remarkably minimal, and unexpected effects can be attenuated well. The system can rapidly return to a stable state with light oscillation when parameter variation occurs. The high-accuracy tracking performance originates from the effectiveness of the MESO. Comparison results demonstrate that uncertainties caused by parameter variations and external disturbances can be estimated and compensated by the MESO effectively. Figure 7 illustrates that the estimation error remains minimal, except for the pulse-type error caused by the discontinuity of Coulomb friction when the velocity changes its sign. In particular, the MESO can estimate the total disturbances rapidly and accurately.
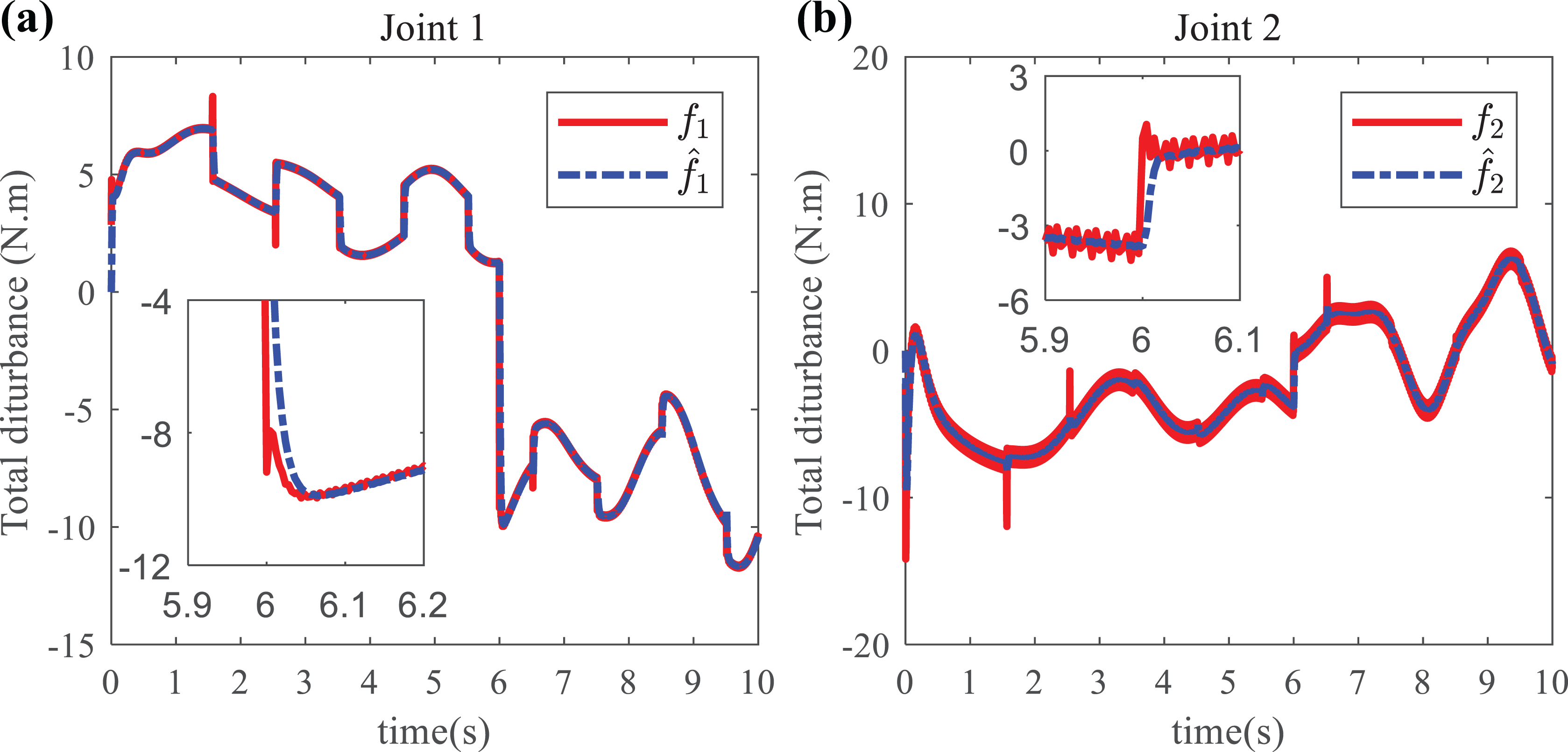
Disturbance estimation of the MESO in case 2. (a) actual total disturbance f
1 of joint 1 subsystem and its estimation
Figure 5 depicts that the tracking performance of the PDAF-ESO controller is also remarkably improved over the CTC. However, the oscillations of the tracking errors still cannot be ignored. A fluctuation of position appears when parameter variation occurs suddenly. Figures 7 and 8 exhibit that the time consumed in estimating and compensating for the sudden disturbance is longer in the ESO than in the MESO. In fact, ESO is a special instance of the MESO when model information is unknown. This instance eases the burden on the controller design by requiring minimal model information but at the expense of a high gain to acquire a requirement of a high tracking speed and favorable estimation accuracy of a disturbance in accordance with lemma 2, which results in increased noise sensitivity. Figures 7 and 8 and the comparison between equations (7) and (39) demonstrate that the total disturbances are smaller in case 2 than in case 3. This condition is due to the fact that MESO uses known model information to reduce the estimation burden largely. The MESO must only estimate the total disturbance, which excludes the known partial information. Therefore, the MESO can acquire favorable estimation accuracy and tracking speed without requiring high observer gains, thereby enabling the MESO to be less susceptible to measuring noise than the ESO while still maintaining the simple structure and easiness to implement. The estimation of large uncertainties is a heavy burden for the ESO. The ESO fails to offer a satisfactory estimation performance considering the abrupt changes caused by parameter variation or discontinuity of Coulomb friction.

Disturbance estimation of the ESO in case 3. (a) actual total disturbance f
1 of joint 1 subsystem and its estimation
Table 2 and Figure 5 suggest that the tracking performance of the proposed CTC-MESO controller is superior to the conventional CTC and other controllers. The composite controller significantly enhances the quality of control and demonstrates robustness against structured and unstructured uncertainties.
Performance indices with uncertainties.

IAE: integral of the absolute value of the error; ITAE: integral of the time multiplied by the absolute value of the error; CTC: computed torque control; MESO: model-assisted extended state observer; PD: proportional–derivative; PDAF: PD controller with acceleration feedforward; SMC: sliding mode control; FIDC: finite-time inverse dynamic tracking controller.
Conclusion
In this study, a modified CTC scheme has been proposed to address the problem of trajectory control of a robot manipulator subjected to structured and unstructured uncertainties. First, the concept and restrictions of the conventional CTC were reviewed in detail. Second, a MESO compensator was incorporated into the conventional CTC to handle inevitable uncertainties. The MESO was used to estimate the total disturbance, including simultaneous structured and unstructured uncertainties. The stability of the proposed controller was confirmed through Lyapunov theory. Simulations of a two-link elbow planar robot manipulator were conducted to demonstrate the feasibility of the new scheme. The simulations confirmed that the proposed CTC-MESO controller can significantly attenuate the effects of uncertainties and improve the system tracking accuracy and disturbance rejection property in comparison with the conventional CTC and PDAF-ESO. The results indicated that the MESO has higher accuracy and faster response, in the meantime, it provides better disturbance attenuation than the classic ESO. The designed controller has the advantages of simple structure, easy regulation, and solid robustness. Furthermore, the performance improvement is obtained without excessive input control torques, which does not yield the actuator saturation. Therefore, it is suitable for industrial application.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by Special Foundation for National Integrated Standardization and New Model of Intelligent Manufacturing, China (grant no. Z135060009002-132) and National Natural Science Foundation of China (grant no. 51875323).