
Abstract
This article presents a computed-torque controller plus adaptive fuzzy trajectory feedforward compensator suitable for the trajectory tracking control of uncertain underwater vehicle. To address the issue of unavailable normalization factor, an adaptive fuzzy trajectory feedforward compensator is proposed and assembled at the input trajectory level of the computed-torque controller rather than at the joint drive torque position. The compensator serving as a low-pass filter is implemented outside the inner control loop by adjusting the desired characteristic depth. Due to the nearly unchanged internal control algorithm, the adaptive fuzzy compensator is feasible to implement and is robust when varying the feedback gain in the inner control loop. Moreover, an adaptive dead zone fuzzy compensator is designed to reduce the effect of the dead zone on the actuators of underwater vehicles according to the unknown input dead zone characteristics. To validate the effectiveness of the proposed controller, simulations are conducted for a desired characteristic depth, and the performance of the proposed controller has been compared with conventional controllers to illustrate the usefulness and efficiency of the proposed controller.
Keywords
Introduction
The depth control of autonomous underwater vehicles (AUVs) is an important technology for successfully completing tasks in complex environments. Submarine oil pipeline inspection, underwater welding, shipwreck search, terrain survey of unknown waters, and so on require AUVs with good depth tracking performance. Due to the strong multi-coupling and the parameter uncertainty, especially the fluid force parameters such as additional mass and damping coefficient, the difficulty of the depth control of the underwater vehicle is increased. The controller needs to better adapt to changes in system parameters to resist complex external environments.
There were many research results on the depth control of AUVs. Many research works were conducted for controlling AUVs with different techniques such as adaptive control,1,2 sliding mode control,1,3,4 fuzzy control,5–7 artificial network control,8,9 and indirect robust control. 10 Nag et al. 11 proposed H∞ controller, which considers the uncertainties in hydrodynamic parameters due to altered operating conditions and also provides an appropriate control mode for desired setpoint tracking and interference suppression. Joo and Qu 12 proposed an H∞ controller also considering uncertainties in hydrodynamic parameters due to altered operating conditions and providing appropriate control activities for desired point tracking and interference suppression. Song and Arshad 13 focused on hovering AUV and developed a robust sliding mode depth controller which can minimize the effect of external interference on system performance. Wang et al. 14 proposed a smoothing function of fuzzy controller for depth control of underwater vehicles based on variable structure control and fuzzy logic. It can be seen from the literature that it is difficult to obtain accurate mathematical models, and the impact of environmental disturbance and other uncertainties on system performance is the difficulty of controller design.
Although the computed-torque control method based on inverse kinematics has been widely used in robot control,15–17 there are few applications on underwater vehicles, due to the time-varying nonlinear modeling error between nominal model and real model. It is difficult to achieve desired control performance only by computed-torque control. Radial basis function (RBF) neural network control has the universal approximation characteristic; it is therefore widely used in the computed-torque control to compensate the tracking error caused by the uncertainty. Jiang et al. 18 designed RBF neural network fault compensator on the basis of the computed-torque control method. Elmokadem et al. 19 combined the computed-torque control with sliding mode compensator to solve the trajectory tracking problem of underwater vehicle on a horizontal plane, which use sliding mode control to overcome the perturbation of system parameters. Chen et al. 20 proposed an adaptive fuzzy compensator based on computed-torque control, which uses the adaptive fuzzy algorithm to improve the trajectory tracking performance of the system under external uncertain disturbances. Generally, compensation signal of the aforementioned fuzzy compensators is appended at joint drive torque position, which might require data normalization and de-normalization for good signal matching. However, many normalization factors that are inaccurate or unavailable can cause performance degradation and even the instability of control system. Furthermore, these fuzzy compensators located in the inner control loop may affect the control performance of the closed-loop system through the feedback gains of the compensator depending on the inertia matrix. To address the issue of the unavailability of normalization factor, this article presents an adaptive fuzzy trajectory feedforward compensator. This compensator is conceptually different from those presented previously. In this compensator, the compensation of robotic model uncertainties can be achieved outside the inner control loop by adjusting the desired characteristic trajectory rather than the normalization factor.
The dead zone phenomenon is involved in the nonlinear characteristics of the actuators of underwater vehicles.21–23 Failing to eliminate the influence of dead zone characteristics on the system may cause output error and may produce the limit cycle oscillations of the system, 24 which can reduce the control performance and even make the system unstable. Xia et al. 21 proposed a fuzzy neural network robust adaptive control as the dead zone compensator for the input dead zone characteristics, which eliminates the adverse effects of dead zone characteristics on the system. Makavita et al. 22 designed command governor adaptive control for the actuator dead zone of underwater drone measurement noise to improve system controllability and tracking performance. The use of the auxiliary task method by Ropars et al. 23 adds additional constraints to the thrust distribution of horizontally redundant underwater vehicles in order to eliminate the effects of the dead zone of the thruster from the response. For underwater vehicle, the motion situation becomes more complex under the effect control input dead zone, which affects the accuracy of the motion and even leads to control failure. Therefore, it is necessary to consider the influence of dead zone on the control performance of underwater vehicles.
In this study, we focus on the depth control of underwater vehicles with uncertain input dead zones and design a composite adaptive fuzzy controller based on computed-torque control strategy. Based on the computed-torque control of inverse kinematics, the fuzzy algorithm is applied to online adaptive learning of feedback errors and to modify the given target of the system, eliminating the influence of system parameter perturbation and external disturbance. According to the unknown input dead zone characteristics, an adaptive dead zone fuzzy compensator is built to eliminate the bad effect of dead zone on system performance. The stability of the closed-loop system is proved using Lyapunov stability theorem. Taking the depth control of underwater vehicles as an example, the simulations are carried out. The results demonstrate that by adaptively compensating the given target of the system and the unknown dead zone characteristics of the control input, respectively, this method can well overcome the shortage of the computed-torque algorithm and improve dynamic and robust performance of the system.
The rest of this article is organized as follows. Section “Dynamic modeling of underwater vehicles” describes the nominal model and the simplified model of the vertical dynamics of underwater vehicles. Section “Adaptive fuzzy compensation controller” describes a composite adaptive fuzzy controller based on the method of computed-torque control. The results and discussions of the simulation are presented in section “Simulated results and discussions.” Section “Conclusion” concludes this study.
Dynamic modeling of underwater vehicles
The underwater vehicle’s model and its reference coordinate system are shown in Figure 1, where {I} is the inertial coordinate system, and {B} is the body coordinate system. The dynamic model of the underwater vehicle on the vertical plane is expressed as the following matrix form

where M is the AUV inertial matrix including additional mass, C(v) denotes the Coriolis centripetal force, D(v) is the fluid damping matrix of AUV, g(η) is the restoring force matrix, τd is external interference, τ is the torque vector produced by the propeller, v is the velocity vector in the body coordinate system, η is the position vector of vertical planar model of underwater vehicle in the inertial coordinate system, and J is a coordinate transformation matrix.

Underwater vehicle’s model and definition of its coordinate system.
The conversion between the body coordinate system and the world coordinate system can be realized using the above formula. We assume that the gravity center and the buoyant center of AUV coincide, and gravity and buoyancy are equal. Then, the restoring force matrix g(η) can be ignored. Assuming that the speed of the underwater vehicle is low, the Coriolis centripetal force C(v) can be ignored. The simplified dynamic equation on the vertical plane is as follows

where η = [x, z, θ] T are the position vector of vertical planar model of underwater vehicle in the inertial coordinate system; v = [u, w, q] T is the longitudinal, heave velocity, pitch angle velocity vector in the body coordinate system; M is the AUV inertial matrix including additional mass; D(v) is the fluid damping matrix of AUV; τd is external interference; τ is the torque vector produced by the propeller; J is a coordinate transformation matrix; and M, D(v) and J are described as follows, respectively

where m is the mass of AUV; Iy is the moment of inertia;
By considering the fact that

To eliminate the acceleration error, the computed-torque control law can be designed as follows:
25

where
Substituting equation (4) into equation (2) yields

By considering the fact that

Rearranging equation (6), the closed-loop error dynamic equation can be rewritten as follows

where
There is modeling error in the dynamic model of the underwater vehicle, such as the error
Adaptive fuzzy compensation controller
Unsymmetrical dead zone fuzzy compensator
The characteristics of dead zone for the actuators of underwater vehicles are that the control system is insensitive to small signals and presents an undesirable discontinuity around the origin. When the signal enters the dead zone, the signal information is missing, which causes a large tracking error of the system. Failing to eliminate the influence of dead zone characteristics on the system may cause output error and may produce the limit cycle oscillations of the system, which can reduce the control performance and even make the system unstable. The nonlinear characteristics of asymmetrical dead zone of parameter uncertainty are illustrated in Figure 2. Ignoring the uncertain nonlinear perturbation of dead zone, the system input of AUV can be expressed as a control input after passing through dead zone

where τ is the control input before entering the dead zone, τol is the control input after dead zone, b =[b–, b+] T is the parameter of the unknown dead zone and b+∈R and b–∈R.
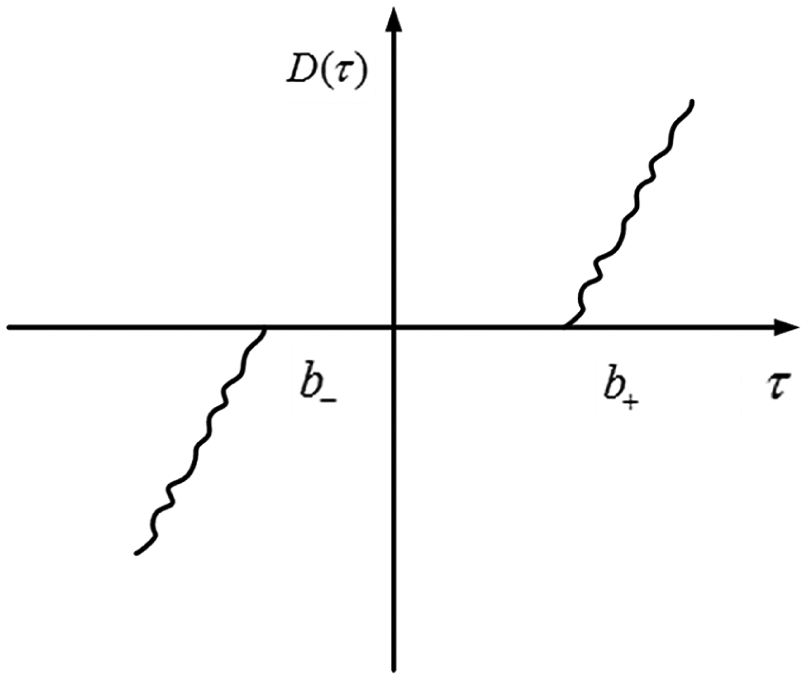
Nonlinear characteristics of asymmetrical dead zone.
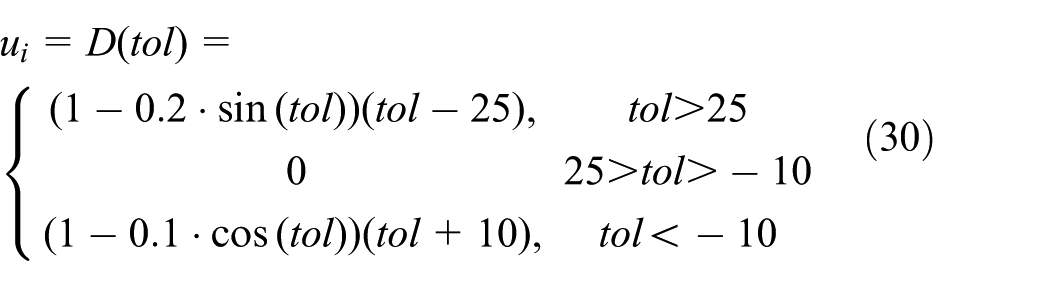
Dead zone has a great influence on the performance of the control system, which decreases the stability of the control system. Therefore, the impact of the dead zone characteristics of thrusters on the system cannot be ignored. A dead zone compensator is applied. The dead zone compensation rules are designed as follows: if (τi > 0), then
The membership function of uncertain dead zone parameters is designed as follows

The output function τfi of the dead zone compensator is determined by the following fuzzy rule: if (τi∈X + (τi)), then

Design of adaptive fuzzy trajectory feedforward compensator
To address the issue of unavailable normalization factor, an adaptive fuzzy trajectory feedforward compensator is proposed and assembled at the input trajectory level of the computed-torque controller rather than at the joint drive torque position. As shown in Figure 3. zd is the target depth. yf is the output function of adaptive fuzzy feedforward controller, which is target to compensate the depth value. zr is the modified target depth value after feedforward compensation. z is the measured depth of AUV. The compensator serving as a low-pass filter is implemented outside the inner control loop by adjusting the desired characteristic trajectory rather than the feedback channel. Due to the nearly unchanged internal control algorithm, the adaptive fuzzy compensator is feasible to implement and is robust when varying the feedback gain in the inner control loop.
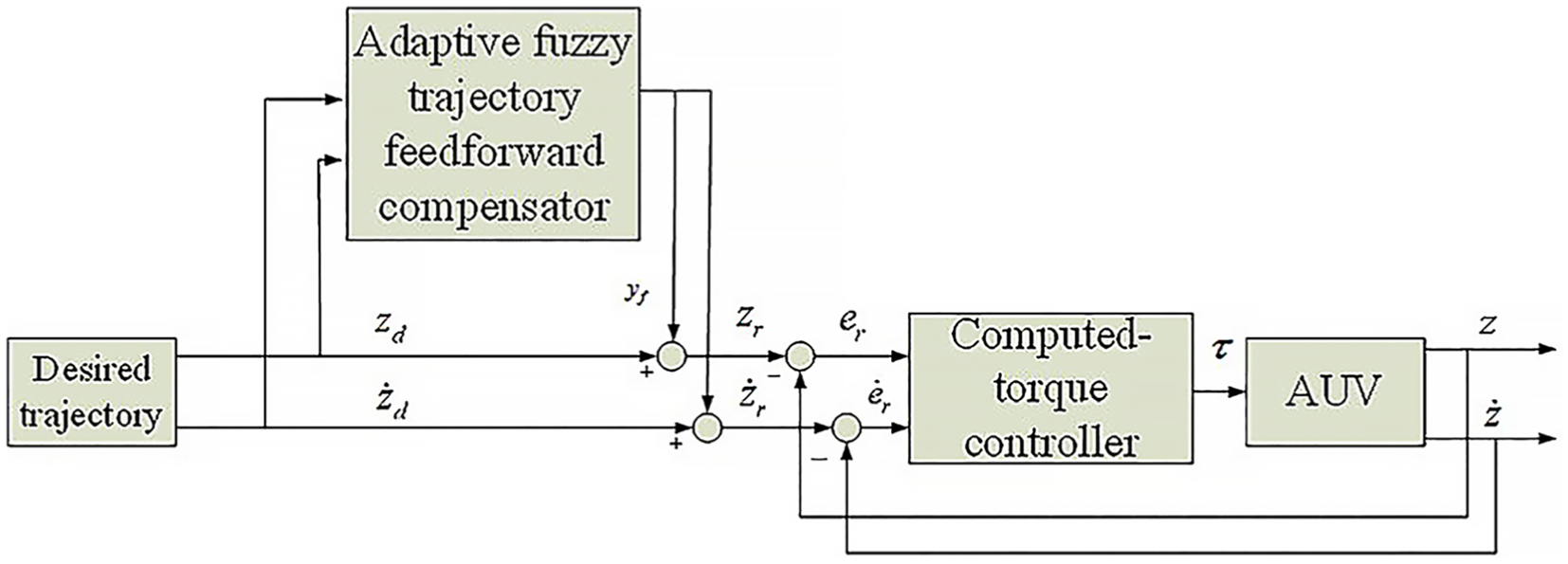
Control structure based on adaptive fuzzy feedforward compensation controller.
Let

As can be observed from Figure 3, the three real error terms

In order to eliminate the errors, the adaptive fuzzy trajectory feedforward compensator is designed as

where

Adaptive fuzzy compensation for uncertain terms
Figure 4 illustrates computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensation for AUVs. The desired depth trajectories

Block diagram of computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensation for autonomous underwater vehicles.
The compensator is composed of an adaptive fuzzy trajectory feedforward compensator and a dead zone fuzzy compensator. The adaptive fuzzy compensator estimates the structured uncertainties and is the main component of the compensator. The dead zone fuzzy compensator is employed to reduce the effects of the dead zone characteristics of the actuators of underwater vehicles on the control system. Hence, the total control torque τol is the sum of the control torque

To reduce the tracking errors, the output parameter


where e = zd – yf – z and
To eliminate the influence of dead zone characteristics on the system, the output function


where
Convergence proof
After considering the dead zone compensator, the closed-loop error dynamic equation of the computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensation is written as follows

where

where

Theorem 1
For the dynamic equation (1) of the underwater vehicle on the vertical plane, under the assumption that the unknown dead zone is bounded||B|| ≤ BM, a control law based on computed-torque controller and adaptive fuzzy compensator for system uncertainty is adopted, as expressed in equation (15). Adaptive law in equation (17) for the adaptive fuzzy trajectory feedforward compensator and the adaptive law in equation (19) of the dead zone fuzzy compensator satisfy Lyapunov stability condition, and the system is finally consistent and stable.
Proof
A positive definite candidate Lyapunov function is defined as

where Γ1 and Γ2 are two positive constants,

where Q ≥ 0.
Differentiating V with regard to the closed-loop error dynamic equation (20) results in

Substituting

Substituting equation (17) and equation (19) into equation (25) yields

Since

Since

To make

From the foregoing, the following results can be obtained:
Simulated results and discussions
REMUS underwater vehicle is applied to validate the effectiveness of the computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensation. The nominal parameters in the vertical plane motion model of REMUS underwater vehicle are taken as follows:
26
the mass of underwater vehicle is m = 30.48 kg; the moment of inertia is Iy = 3.5 kg m2/rad; additional mass matrix is
In the depth tracking test, the control target is to force the controller to track a desired depth zd = 0 m, and the initial state is set as follows: longitudinal velocity of underwater vehicle s0 = 2 m/s; w0 = 0.02 m/s; q0 = 0.04 rad/s; z0 = 2 m. The control parameters in the computed-torque controller are chosen as kv = kp = 10. The matrix Q in equation (23) is selected as Q =[500 0;0 500]. For the given matrix Q, we can solve the positive definite symmetric matrix P from the Lyapunov equation (23). The value of the positive constant in the adaptive fuzzy control law of equation (17) is picked as Γ1 = 20. The parameter in the adaptive fuzzy control law of equation (19) is chosen as Γ2 = 250 with κ = 0.2. Five fuzzy labels (i.e. NB, NS, ZO, PS, and PB) are utilized to describe the universe of discourse of each fuzzy input term. The following membership functions are selected as
Example 1
The conventional computed-torque controller is applied to the REMUS underwater vehicle. Its control drive torque is written as

A series of numerical simulation results of the depth tracking trajectories and control drive torques under the actions of the conventional computed-torque controller are illustrated in Figure 5. It can be seen that the tracking displacement errors tend to deteriorate. Moreover, it is noteworthy that the estimated parameter values of the control drive torques fluctuate remarkably, which might exceed the limitations of actuators. Hence, some compensators should be appropriately designed and embodied in the conventional computed-torque controller to reduce the effects of uncertainties.

Depth tracking performances of the conventional computed-torque controller: (a) response curve of system depth z and (b) control input τ1, τ2, and τ3.
Example 2
The computed-torque controller plus adaptive fuzzy trajectory feedforward compensator is applied to the REMUS underwater vehicle. Its control drive torque is defined as

Figure 6 demonstrates the depth tracking performances under the actions of the computed-torque controller plus adaptive fuzzy trajectory feedforward compensator. Compared with uncompensated example shown in Figure 5, the tracking errors in transient and steady state in the second example, shown in Figure 5, are remarkably reduced. The reason is that the external disturbances and unknown parameter uncertainties are reduced by the adaptive fuzzy compensator in equation (16). As shown in Figure 6(c), the adaptive fuzzy compensator can be used for online identification of complex modeling uncertainties of the system. Although there are fluctuations in the initial stage, it is generally smooth, and can effectively compensate for the control input. However, due to the existence of uncertain dead zone in the control input, there is a wide range of energy intensive tremble in the control input, as shown in Figure 6(b). This tremble will cause the chattering of the mechanical system, reduce the performance of the system control, and is very unfavorable to the closed-loop control of the system.

Depth tracking performances of the computed-torque controller plus adaptive fuzzy trajectory feedforward compensator: (a) response curve of system depth z; (b) control input τ1, τ2, and τ3; and (c) output of adaptive fuzzy trajectory feedforward compensator yf.
Example 3
The computed-torque controller with uncertain dead zone compensator is applied to the REMUS underwater vehicle, and its control drive torque is calculated as

Figure 7 illustrates the depth tracking performances of the computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensator. The simulation results demonstrate that the proposed controller tracks the desired depth extremely well and reaches convergence rapidly. Comparing Figures 5(a) and 7(a), the dynamic and static performances of the proposed controller have been slightly improved, after the addition of the only uncertain dead zone compensator into the conventional computed-torque controller. However, the control performances are still unsatisfactory. As can seen from Figures 6(a) and 7(a), it is clear that the computed-torque controller plus the single adaptive fuzzy trajectory feedforward compensator can achieve better control performances than the computed-torque controller with the only uncertain dead zone compensator. However, the smoothness of the control input torque shown in Figure 7(b) clearly demonstrates the advantage of the uncertain dead zone compensator over the single adaptive fuzzy trajectory feedforward compensator without dead zone compensation in Figure 6(b).
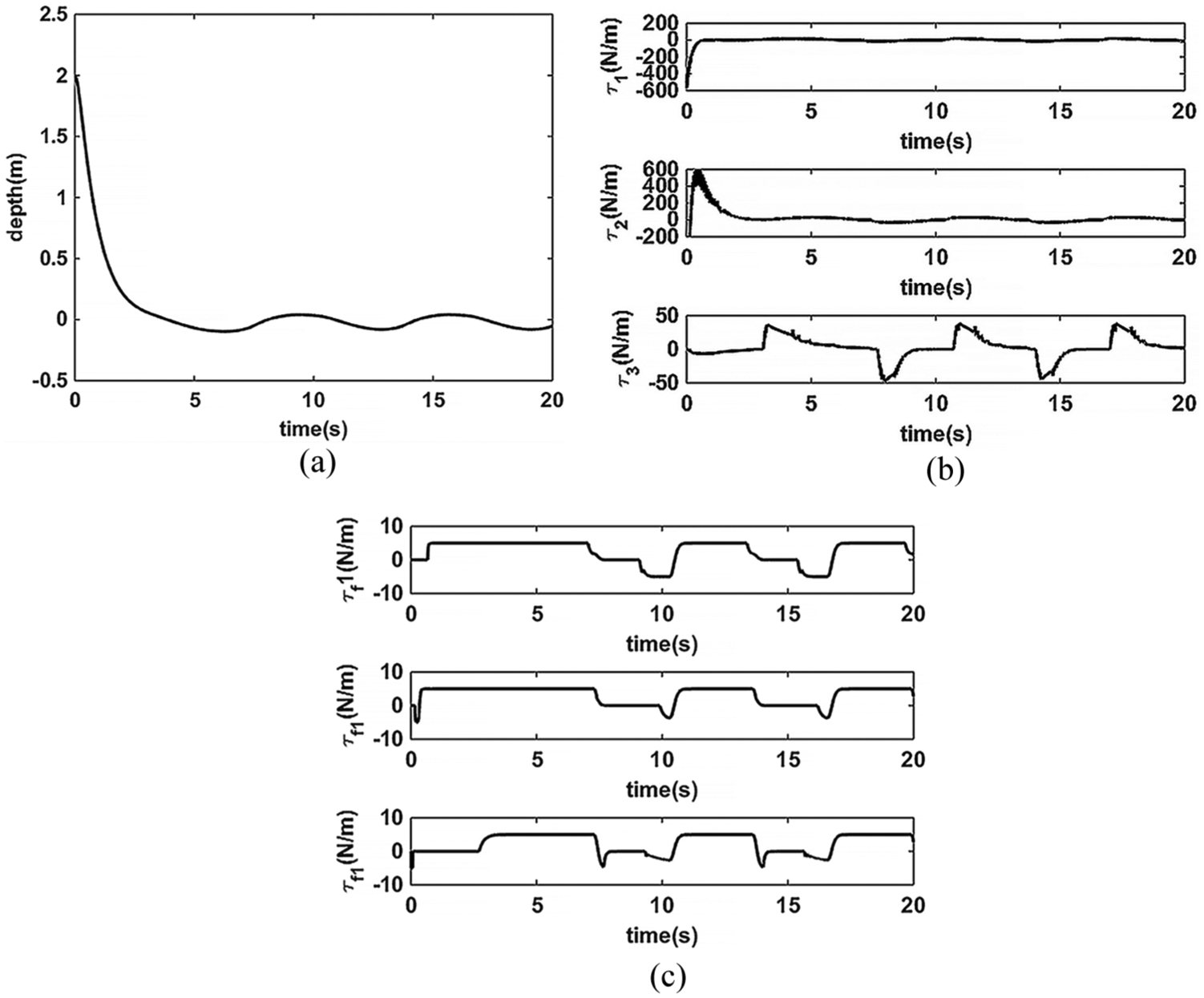
Depth tracking performances of the computed-torque controller with uncertain dead zone compensator: (a) response curve of system depth z; (b) control input τ1, τ2, and τ3; and (c) output of uncertain dead zone compensator τf1, τf2, and τf3.
Example 4
The computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensator is applied to the REMUS underwater vehicle, and its control drive torque is calculated as
Figure 8 demonstrates the depth tracking performances under the actions of the computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensator. By comparing Figures 5 and 8, it is clear that after adding the two adaptive fuzzy compensators, the dynamic and static performances of the proposed controller are improved, and the control input torque has no obvious change. From the simulation results in Figures 6–8, it is clear that the compensation ability of the union of the two adaptive fuzzy compensators is more robust than only adaptive fuzzy trajectory feedforward compensator, or only uncertain dead zone compensator.
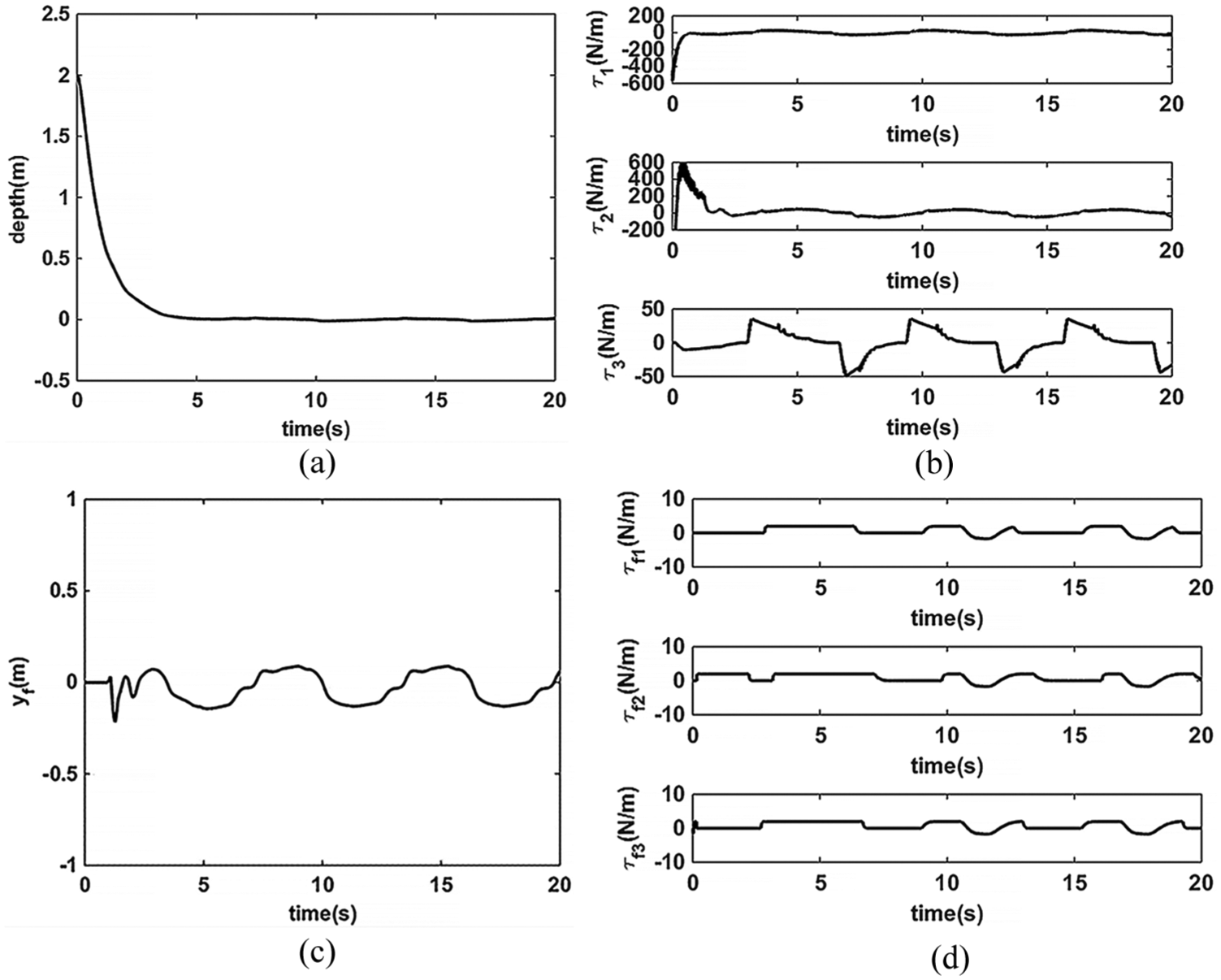
Depth tracking performances of the computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensator: (a) response curve of system depth z; (b) control input τ1, τ2, and τ3; (c) output of adaptive fuzzy trajectory feedforward compensator yf , and (d) output of uncertain dead zone compensator τf1, τf2, and τf3.
Conclusion
In this article, the computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensator is proposed for depth tracking control of REMUS underwater vehicle with uncertain dynamic model. The adaptive fuzzy trajectory feedforward compensator serves as a low-pass filter at the input trajectory level rather than at the joint drive torque position, and it offers good compensation performance by adjusting the desired characteristic trajectory outside the inner control loop. Compensating at the input trajectory level provides several benefits over other fuzzy compensators at the joint drive torque position. First, the adaptive fuzzy compensator outside the inner control loop is feasible to implement due to the nearly unchanged internal control algorithm. Second, it provides robust performance to varying feedback gains in the inner control loop. Moreover, an adaptive dead zone fuzzy compensator is built to eliminate the bad effect of dead zone on the actuators of underwater vehicles according to the unknown input dead zone characteristics. The computed-torque controller plus adaptive fuzzy trajectory feedforward compensator based on uncertain dead zone compensator guarantees that all control signals are bounded and the closed-loop system is globally and asymptotically stable. The regulation and depth tracking performances of the proposed controller have been demonstrated by simulations of REMUS underwater vehicle with uncertain dynamic model.
Footnotes
Handling Editor: Dan Zhang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Major Scientific and Technological Innovation Project of Shandong Province with Grant No. 2017CXGC0923 and Key Research and Development Program of Shandong Province under Grant Nos 2017GGX30112 and 2018GGX103025.