
Abstract
Introduction
Drones can transmit live video and geographic coordinates during the planning stages for search and rescue operations and the operations themselves. There are few simulation studies in which drones provided rescue support. However, the literature does not contain any simulation studies involving the use of drones to locate lost “victims” represented by dummies in rivers. We developed a simulation model to compare the first visual contact times for drone-assisted search techniques (DAST) and classic search techniques (CST).
Methods
In this prospective experimental simulation study, we used both DAST and CST to perform a series of river searches for unconscious victims (represented by dummies). We calculated the first visual contact times, total scanned area, scanned area per minute, flight-walking distances, and flight-walking speeds and compared the results between both groups. The data are presented as mean±SD.
Results
We performed 20 search and rescue operations, 10 with the CST and 10 with the DAST. The time to reach the victim was 823±177 s using CST and 80±14 s using DAST. The area scanned by unit time was 3091±54 m2·min-1 using CST and 22,640±1622 m2·min-1 using DAST.
Conclusions
The drone-assisted search technique located a simulated victim drifting in a river faster than the classic search technique. The use of drones in search and rescue operations could improve the time to find victims.
Introduction
According to World Health Organization data, drowning is the third leading cause of unintentional deaths worldwide, accounting for >236,000 deaths annually. The actual figures might be higher due to inadequate reporting. 1 -6
Ninety percent of these deaths occur in low- and moderate-income countries, and many occur in rivers.1,2,5,6 Males and young people <25 y account for most of the drowning fatalities, and children <5 y are the highest risk group—however, the actual figures might be higher due to inadequate reporting. 6 The measures to protect against drownings vary depending on regional dynamics. 7 According to the World Health Organization data, factors leading to drowning deaths include a lack of protective barriers, adults failing to supervise children, inadequate swimming skills, the absence of warning signs in dangerous regions, alcohol consumption, water-borne transport, and natural disasters. Proper training of rescuers is one of the most important factors affecting mortality and morbidity in drowning cases.
There are several predictors of poor outcomes in drowning victims, such as the length of time the victim’s head stays under water (submersion duration) and the time to restore oxygenation to the brain. According to the European Resuscitation Council and the American Heart Association, prolonged submersion times are associated with poor outcomes.8,9 Finding victims as soon as possible is critical with regard to removing them from the water and administering medical intervention. Delays can lead to significant neurological or cardiopulmonary disabilities or death.
Different factors affect rescue efforts and the ability to find victims in river and lake drownings. It is often challenging to locate victims due to river currents, the incline of the watercourse, rugged terrain, and plant cover. Consequently, a substantial number of individuals involved in search and rescue operations may be involved in locating the victim.
Unmanned aerial vehicles
Although there are experimental studies on search and rescue operations with drones, to our knowledge, no previous studies have considered the use of drones in the search for individuals at risk of drowning in rivers.15,16 This study aimed to evaluate the practicality of using drones to locate simulated victims lost in rivers and compare the results with classic search techniques.
Methods
In this prospective experimental simulation study, search operations were conducted using dummies to simulate unconscious victims swept away in water at a temperature of 23°C on a sunny day in October 2020. The location was the Çoruh River in Bayburt, Turkey, 1480 m above sea level. The water flow rate was 2.4 km·h-1. Both the drone-assisted search technique (DAST) and the classic search technique (CST) were used.
The primary endpoint of the study was to compare the times of the first visual contact with the victim by CST and DAST. Victim detection using CST involved a 2-member team searching along the river’s edge and examining the watercourse. For the DAST searches, the drone pilot controlled the drone from the starting point and attempted to locate the dummy by examining live images transmitted to a tablet integrated into the drone’s remote control system.
To determine the flow velocity of the river, we identified an area at the midpoint of the river 10 m wide using starting and ending points. A red plastic ball 10 cm in diameter was used as a floating instrument for calculating rivere plastic ball from the starting point and calculated how long it took to reach the endpoint. We repeated this process 4 times and the elapsed time was averaged. The water flow velocity was measured by calculating the distance covered in unit time and measured as 2.4 km·h-1 at the beginning of the simulation. River flow was not measured before each search.
We used dummies to simulate a typical unconscious victim drifting in the river. We prepared these dummies by filling boiler suits (coveralls) with dry sawdust. Each dummy was 180 cm tall and weighed approximately 40 kg (Figure 1). Ten dummies were prepared and assigned numbers. Wet dummies were not weighed after the study was performed.

To simulate the unconscious victim, boilersuits were filled with sawdust.
The starting point was determined as 40°23'6.61"N latitude and 40°17'33.75"E longitude. A drone pilot, a local guide, a coordinator, and 4 different teams—1 throwing team (TT) and 3 search teams (STs) of 2 officials each (Figure 2)—were ready at the starting point. The TTs duty was to drop the dummies into the water. Each of the 3 STs consisted of 2 search and rescue officials who had received standardized training from the Turkish Ministry of Health in basic search and rescue operations, including swift-water rescue, administering medical interventions at the scene, and learning various response techniques in natural disasters (avalanches, floods, earthquakes, etc). All the STs had cell phones with internet connections and could establish the global positioning system (GPS) location of the first visual contact point. The coordinator created a WhatsApp messenger group consisting of all the STs and the coordinator to facilitate communication and save the GPS data. The coordinator’s task was to set the time for each search operation, alerting the search teams and the drone pilot to begin the search operations.

Classic search technique; 2 search teams are searching for the dummy along the watercourse.
The study used a DJI Mavic 2 Pro (SZ DJI Technology Co., Ltd., Shenzhen, China) brand drone, which can transmit live video and 4K (3840x2160) video recordings, with a range of 8 km and speeds up to 72 km·h-1 (in sport mode). It was operated by a drone pilot licensed by the Turkish Civil Aviation General Directorate. The drone pilot monitored live images taken by the drone using an iPad Pro 11 tablet linked to the remote control. The drone also recorded the images onto a microSD card inside the drone. Three spare drone batteries were kept ready and charged during the study to avoid battery problems. Because the drone recorded its route and flight coordinates, it subsequently recorded the first visual contact points using a DJI Go 4 app on the iPad Pro 11.
For the first rescue operation, dummy-1 was dropped into the water by the TT. After 3 min, the coordinator alerted the drone pilot and ST-1 to search for the dummy simultaneously. ST-1 began its search operation following the river course direction on one side of the riverbank. The entire riverbed could be seen from one side of the river because of the sparse plant cover around the river and the acceptable transparency of the water. For this reason, a one-side search operation was enough to conduct the CST operations. The clock was started when the search commenced, and it was stopped when ST-1 established the first visual contact. The coordinator recorded the total search time at this time. ST-1 recorded the GPS information for the first visual contact point using WhatsApp’s location-share function and shared it with the coordinator via the WhatsApp group. For the DAST operations, the drone pilot started the search simultaneously with ST-1. The coordinator started the clock, and the drone pilot elevated the drone to a height of 50 m. The camera angle was directed toward the watercourse, and the search began downstream (Figure 3). When the drone pilot made his first visual contact with the dummy, the coordinator recorded the time elapsed. The drone recorded the first visual contact location on the flight records. After all search operations ended, the coordinator saved the GPS data from the DJI Go 4 application. The drone then flew back to the starting point and waited for the next search operation. After CST and DAST operations finished, ST-1 retrieved dummy-1 from the river, returned to the starting point, and rested for their next search operation.

Picture of a dummy found by the drone.
The second search operation started with dummy-2, which the TT dropped into the water. After 5 min, the coordinator alerted both the drone pilot and ST-2 to begin their search operation simultaneously, following the same procedure that was explained previously.
The same procedure was repeated 8 more times using new dummies each time and varying the waiting times before beginning each search according to the following schedule: 8, 10, 15, 20, 25, 30, 35, and 40 min. In total, 10 search operations were conducted using new dummies for each search. One of the STs took part in each search operation and the same drone was used for all search operations (Table 1). Each ST then rested until it was their turn to conduct another search. All search operations were completed on the same day.
Simulation results for the classic search and the drone-assisted search techniques
ST, search team.
Mann-Whitney U test was used for all comparisons.
P<0.001;
P=0.496;
P=0.406.
The data specified with the same superscript were compared statistically among themselves.
For both the CST and DAST operations, we calculated the scanned area and flight/walking distance for each search using Google Earth Pro (Figures 4 and 5). We calculated first visual contact times, total scanned area, scanned area per min and walking and flight speed data. The data were analyzed using SPSS 23.0 software (IBM, USA) and are presented as mean±SD with 95% confidence intervals. Intergroup comparisons were made by applying nonparametric Mann-Whitney U tests. Confidence levels were chosen and statistical significance was set at P<0.05.
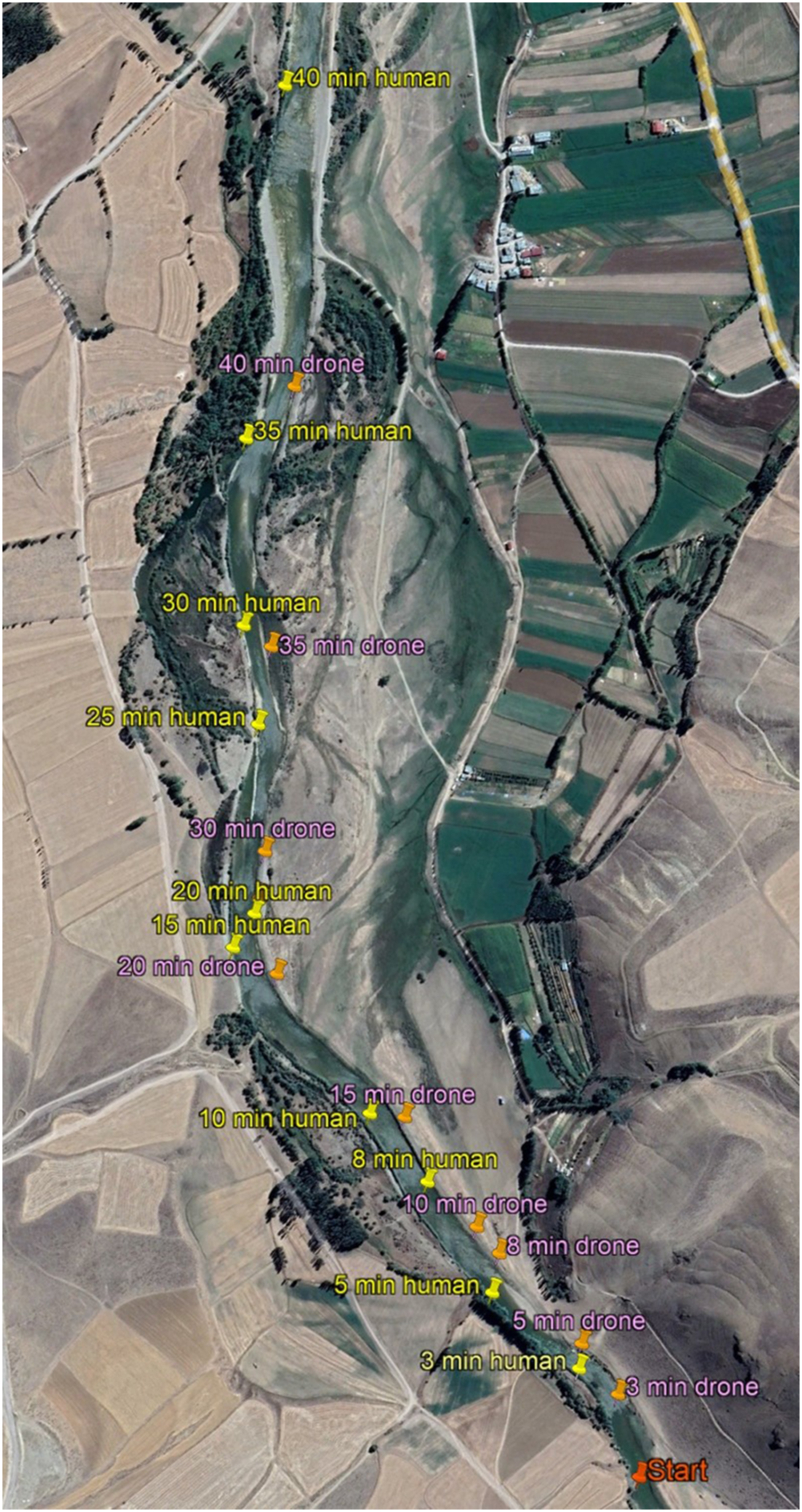
View of the total search area and found points, on Google Earth Pro screen.
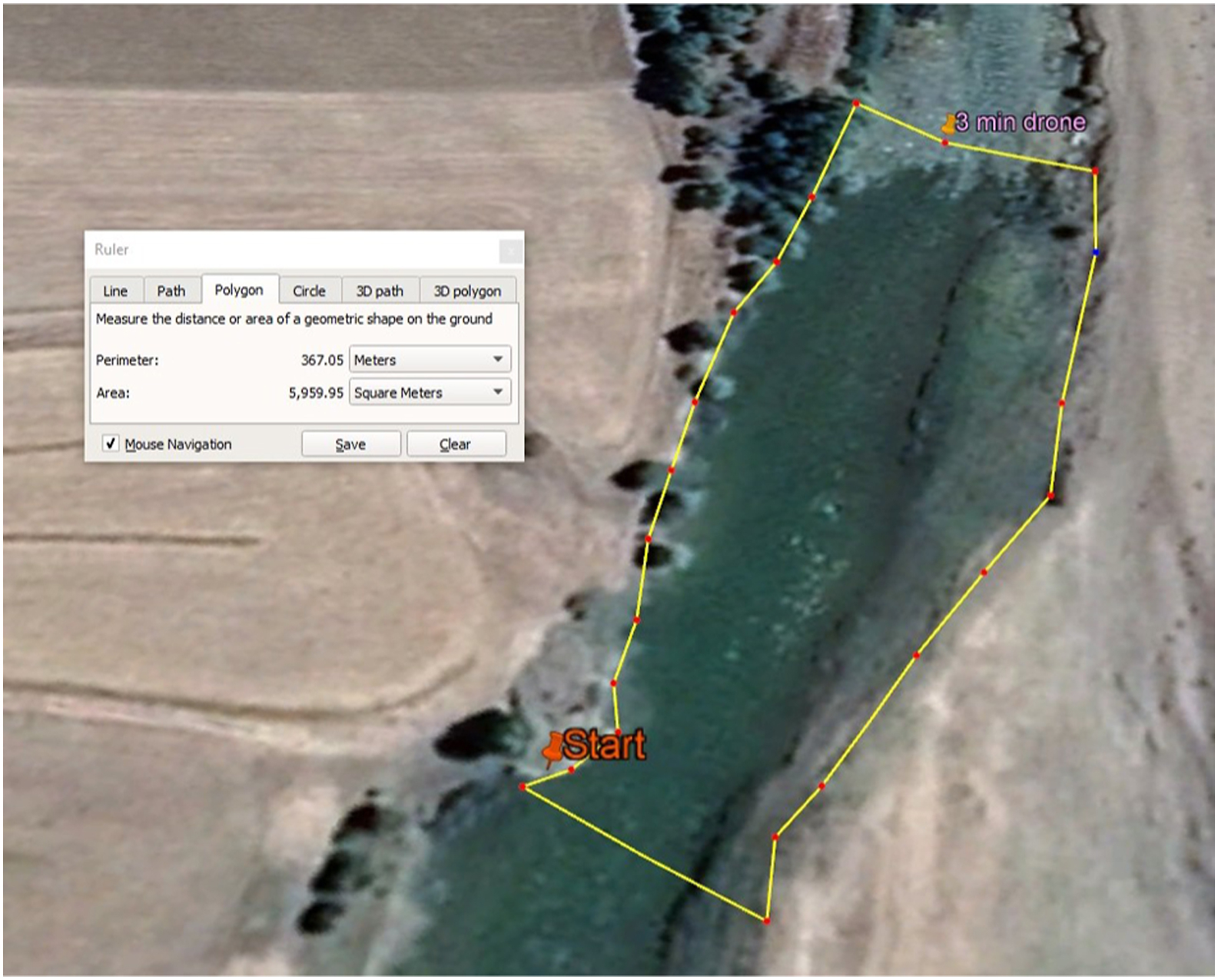
Method of calculating the area of the riverbed scanned from the starting point to the point of first visual contact (using Google Earth Pro).
Results
For the CST operations, the first visual contact time was calculated as 823±177 s. For the DAST operations, the first visual contact time was calculated as 80±14 s (P<0.001). For the classic search, the average river surface area scanned per minute was calculated as 3091±54 m2·min-1 as compared with 22,640±1622 m2·min-1 for the DAST searches (P<0.001). The data obtained from the study are shown in Table 1. Walking and flight speeds represent average values for each search separately.
Discussion
The principal finding from this study is that the simulated victim was located significantly faster in all drone-assisted search operations. Time is a crucial criterion, especially in submersion cases. According to the ERC 2021 resuscitation guideline, a shorter submersion duration is associated with better outcomes. 8 In addition, the American Heart Association’s adult basic life support 2020 guideline emphasizes that people with <5 min of submersion time have better neurological outcomes than those who stay underwater longer. 9 Survival probability is extremely low in water warmer than 6°C if the submersion time is >30 min. In waters colder than 6°C, the probability of survival is extremely low if the submersion time is >90 min. 17 However, if the water is excessively cold, the resulting hypothermia may offer neuroprotection compared with average body temperature, and there may be a better chance of survival as the submersion time increases. 18
First visual contact times were significantly shorter using DAST compared with CST (P<0.001). The time spent locating a victim is very crucial in search and rescue operations, which cannot proceed to the next stage without finding the victim. If the location of a victim is accessible, shortening the first visual contact time may reduce the time spent initiating rescue operations. In contrast, if accessing a victim is impossible or challenging, no relationship can be established between first contact and removal time.
The water flow speed in the present study was 2.4 km·h-1. Given that a river’s speed of flow may vary at different locations in the river course, we measured water flow speed at the river center and the closest point from the surface, where a river has the highest velocity. River flow velocity could have been perceived as low, but the literature does not define an ideal water flow velocity for this kind of simulation study.
Rescuers play a critical role in river drowning cases. All rescuers risk their lives. There is a high prevalence of fatal and nonfatal drowning among untrained persons attempting to perform in-water rescues. 19 The search area can sometimes be huge in search operations, and accordingly, the search team may consist of many people. Drones can locate victims using fewer personnel and speed up the transition to the rescue phase of the operation. The use of drones means that fewer search and rescue personnel will need to work in risky areas.
The literature contains studies of different drone-assisted search simulations performed in a variety of scenarios, all of which generated their methodologies to approximate real-world experience as closely as possible.15,16,20 In our study, we tried to simulate as close to reality as possible a search for a victim drifting in a river.
It may be more beneficial in actual search and rescue operations to apply a hybrid method with live images obtained from drones to locate the victim and the rescue performed by search and rescue teams. This technique is currently used in some search and rescue operations, but there is no detailed study examining this issue in the literature.
Study Limitations
In drone-assisted search operations, certain conditions can challenge the drones’ technical capabilities, such as bad weather, plant cover in the search area, and the level of visibility. Different weather and terrain conditions (such as trees, rocks, and current velocity) can also affect the time it takes to locate the victim in classic search operations. For our study, we had favorable weather conditions and accessible terrain. Our study did not assess performance in high water flow conditions or with different numbers of search officials.
We used the WhatsApp messenger for communication and mobile data service quality was good in the study area. Radio communications are an alternative means of communication that can be used depending on regional requirements.
Search and rescue simulations present several inherent challenges, including selecting the proper dummy, and our choice of dummy could be considered the principal limitation of our study. We used dummies with blue apparel, and this color choice might have helped our searches. The color and design of the apparel on a dummy can increase the dummy’s visibility. The dummies’ composition may produce different reactions after contact with water. Thus, drifting or submerging characteristics may differ. We prepared these dummies by filling boiler suits with dry sawdust. The approximate weight of each dummy was 40 kg. However, we did not weigh the wet dummies to determine whether they reached actual adult human weight after contact with water. Therefore, we cannot comment on whether our dummies could simulate the mass of an unconscious victim drifting in the water.
Conclusions
The drone-assisted search technique located a simulated victim drifting in a river faster than the classic search technique. The use of drones in search and rescue operations could improve the time to find drowning victims, which may potentially affect survival.
Footnotes
Acknowledgements
Author contributions: Study concept and design (MC, SP, AG); acquisition of the data (MI, MY, MFB); analysis of the data (MC, MY, MFB); drafting of manuscript (MC, MI, MY, MFB); critical revision of the manuscript (MC, SP, MI, AG); approval of the final manuscript (all authors).
Disclosures: None.
Funding
Financial/Material Support: The study was supported by the scientific research projects division of Karadeniz Technical University.