
Abstract
Introduction
“Critical separation” is a simple method for spacing searchers intended to produce a predictable probability of detection (POD). A more precise method, based on effective sweep width (W), has been adopted only slowly. Accurate PODs are critical in planning priorities in future operational periods. Therefore, it would be useful to know what POD a critical separation determination actually produces.
Methods
Detection ranges (Rd) were measured on high- and low-visibility adult mannequins (stuffed Tyvek suits of varying colors) and a red helmet detected by 6 searcher volunteers. Conversion factors previously described in the literature were used to convert Rds into predicted Ws and the previously described logit model to convert Ws into PODs.
Results
The Rds were 26±6 m (mean±SD) for the high-visibility mannequin, 15±5 m for the low-visibility mannequin, and 24±6 m for the helmet used in the critical separation determination. The predicted Ws were 47±15 m, 16±8 m, and 42±14 m, respectively. Critical separation would therefore result in predicted PODs of 67±17% or 32±16% for nonresponsive adults in high- versus low-visibility clothing.
Conclusions
Critical separation is a simple, quick way to array searchers in the field. The current study suggests that the value of critical separation in producing the 50% target POD will depend on the whether the search object used for the critical separation determination has a similar detectability/W to the actual target of the search effort. Still, the results from a critical separation determination may offer more predictability and reliability than the common practice of POD estimation by team leaders.
Introduction
Lost-person searches usually must be undertaken with insufficient resources to look in every possible place the search subject may be located. Because of this, search planners rely on estimated probabilities that the subject is located in each segment within the total search area (probability of area [POA]) and the probability that a given search effort would find a subject assuming he or she is present in that segment (probability of detection [POD]). These are used to predict overall probability of success (POS) and to direct further search efforts via the Bayesian equation POS = POD × POA.1,2
However, POD has proved difficult to determine with any accuracy. The classic means for determining PODs, which requires search-team leaders to estimate them, results in large errors that likely undermine any attempt to quantify search efforts. 3 An alternative method, called critical separation, employs a “Northumberland rain dance”—named for the Northumberland National Park Rescue Team of the UK which originated the technique, and is described in the methods. The rain dance positions searchers so that they are separated by the distance at which a given search object, if placed between each searcher pair, can just be seen by both. This was meant to achieve a 50% POD for that search object. 4 The search object was meant to stand in for a typical “clue” found during a search, which in turn could alter the priorities for assigning search efforts, under the assumption that “there is only one search subject, but many clues as to his or her whereabouts.”
The critical separation method did not fully take into account current search theory even at the time of its publication.1,4 In particular, at the time it did not fully incorporate methods for quantifying POD via effective sweep width (W), a distance-scaled quantity that can be measured into the field and converted into POD via the logit model, which takes into account W, the number of detectors, and the length of the path each detector moves through a search area to calculate POD.1,2 The logit model has since been used to determine the POD a rain dance should produce, but that report was theoretical and did not involve field measurements. 5
Another limitation of critical separation is that the object selected to be at the center of a rain dance is arbitrary. The author of the current study was taught to use a helmet. The original method used a rucksack. It is not clear how either relates to a human search subject, let alone the variety of clues that a subject may generate in a search area. Although it is operationally useful to find clues, the ultimate goal of a search is to find the subject, and even good estimates of clue detection do not directly address that issue.
As mentioned, the critical separation spacing is the combination of the distances at which the search object is visible to searchers on opposite sides of that object. Thus, it is essentially twice the detection range (Rd), the maximum distance at which a searcher can spot an object of known location and which is used as a rough estimate for W in setting up a sweep width experiment. 1 The author and colleagues reported a means for converting Rd to W. 6 The chief observation of that study was that W can be predicted from Rd through a simple multiplication process but that high-visibility objects must be multiplied by different conversion factors than low-visibility objects.
For subjects wearing colors of unknown contrast with the environment, it would arguably be most useful to plan for both a high- and low-visibility subject. This is because either under- or overestimating PODs poses distinct problems: Underestimates lead to lingering search efforts in empty areas, and overestimates risk abandoning an area in which the subject is present but has not yet been detected.
To acquire a translation between searcher separation as classically conducted in a Northumberland rain dance and field observations that can be directly related to the search objects used in standard effective-sweep-width experiments, the author took advantage of a field-search training exercise conducted by Mountaineer Area Rescue Group (MARG) and the Appalachian Search and Rescue Conference in Cheat Lake, West Virginia. Before conducting a line-search training, the standard Tyvek mannequins from previous sweep-width experiments3,6,7 were used in the context of a rain dance/critical separation determination to acquire Rd values that we could use to predict Ws and PODs. 6
Methods
The methods previously reported for deriving Rd values3,6,7 were used, employing the standard Tyvek mannequin search objects. These consisted of a white mannequin (high visibility in the original studies) vs such a mannequin spray-painted olive green (low visibility), with the high-visibility mannequin adorned with a blaze orange hunter’s vest. The originators of the ground search and rescue (SAR) sweep-width methods used these mannequins because, when stuffed with shipping boxes to a chest height of 25 to 30 cm, they have a visual cross-sectional area close to that of a supine adult human (0.49 m2 for the mannequin, 0.54 m2 for the human). 3
The current study made the following changes to that method. The Northumberland rain dance procedure was followed instead of the more formalized Rd determination described in those reports. Unlike the earlier studies, instead of a single searcher determining Rds for an arbitrary search object around the compass points, multiple searcher pairs spaced themselves arbitrarily in a circle around each search object. The pairs of searchers stood on opposite sides of the search object (Figure 1). They moved outward until they lost sight of the object and then moved back in until they could just see the object. By looking across the object to the partner on the opposite side, the searcher gained a sense of how far the partner should be in the search line (in Figure 1, the combined d for each of the 2 searchers opposite each other). The distance between each pair of searchers is the “critical separation” intended to maximize searching efficiency and achieve a 50% POD. 4 Each pair of searchers performed a rain dance simultaneously on each search object. Note that each distance will vary due to differences in terrain and vegetation around the search object, and so for the purposes of this study the mean value was used to estimate spacing. (In a real search effort, the overall effectiveness of the team effort will be determined by this mean spacing. 7 )
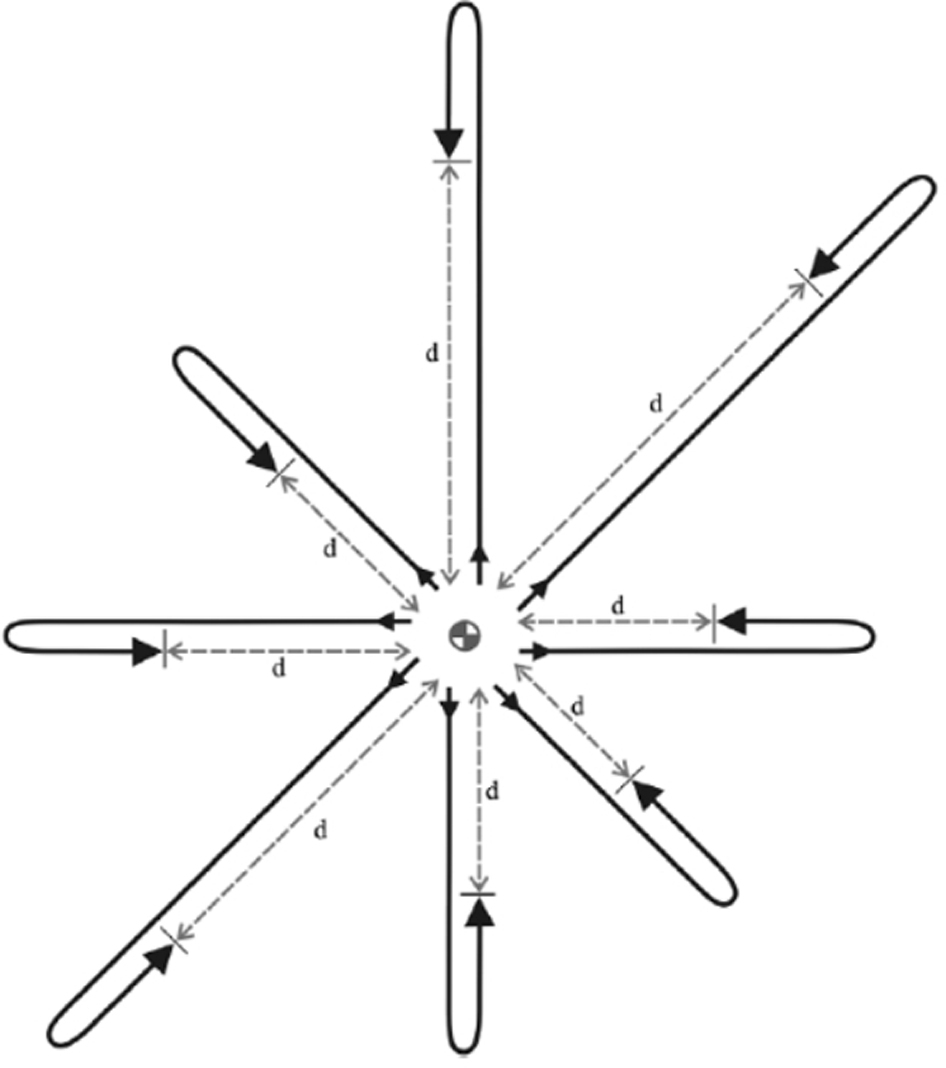
Determination of detection ranges (Rd) using multiple searchers. The Northumberland rain dance, as performed in this study, differs from the previously reported Rd (d, in the figure) determination in that instead of 1 searcher performing each rosette in sequence at set compass points, an arbitrary, even number of searchers performs the distance determinations simultaneously, each noting the distance to his or her partner opposite the search object. Figure from Koester et al. 6 Reprinted with permission from the Wilderness Medial Society. ©2014 Wilderness Medical Society.
The 24 h preceding the experiment had seen some snowfall. Though the temperatures during this daylight experiment were above freezing, throughout the observations in the current study the ground remained covered with white snow. This posed a challenge because previous winter experiments had been conducted in “brown winter” conditions without snow cover. Thus, the usual high-visibility mannequin—a white Tyvek suit with a blaze orange vest—was no more visible than the vest alone. Therefore, the usual mannequins were reversed, with the white mannequin on its own employed as the low-visibility search object, and the orange vest on the olive-green spray-painted mannequin (previously used as a low-visibility object) as the high-visibility object. The white mannequin was indeed much harder to see, and the dark of the green mannequin, paired with the orange vest, provided much better contrast with the snow, as can be seen in the following results. The helmet used as the critical separation search object was a Petzl Ecrin Roc helmet in red (Petzl America, West Valley City, UT).
Locations were recorded with a Garmin GPSmap 62s GPS receiver (Garmin International Inc., Olathe, KS). A Nikon ProStaff Laser 440 Rangefinder (Nikon Corporation, Tokyo, Japan) was used to determine the distance between each searcher and the search object. In 1 case (searcher #3, high-visibility mannequin), it was impossible to obtain a measurement due to reflection of the laser by intervening vegetation. In another (searcher #6, low-visibility mannequin), the Rd was too short for the rangefinder to register (under 10 m). In the latter case, the searcher measured out the distance by putting one foot immediately in front of the other, counting the foot-lengths, and then measuring his boot with a tape measure to find the conversion between foot-lengths and meters.
The experiment was undertaken from daylight hours of 1158 through 1239 in November 2018. Data collection for each of the 3 search objects therefore took an average time of approximately 14 min. As described, multiple pairs of searchers performed the rain dance simultaneously on each search object. The location of the experiment (the USNG coordinates of the placement of the clue) was 17SPD0138691223, in Coopers Rock State Forest, West Virgina. The location was chosen arbitrarily, being close to the parking area but outside the area designated for the subsequent search training. The area (climate type: hot continental regime, mountains) was a central Appalachian broadleaf forest dominated by maple, beech, and birch, with an understory of sometimes thick greenbrier. The density of greenbrier had a noticeable effect on Rd, with searchers in thicker greenbrier obtaining shorter Rds. None of the vegetation in the immediate area was leafed, a blanket of snow covered the ground, and much of the vegetation had a coating of ice.
The logit model,
1
which is the standard method in use for calculating POD operationally,
3
was employed for converting W to POD. This model, sometimes referred to as the log odds model, is based on a logarithmic/exponential relationship between POD and search thoroughness:


For a single searcher within an area A, itself a single sweep defined by d multiplied by an arbitrary lateral distance L to the searcher’s left plus L to his or her right, the coverage equation simplifies to

Thus, if the searchers are spaced at 2 × L, C will be W divided by that spacing. When using critical separation, the average spacing will be twice the mean Rd for the arbitrary search object, and thus the spacing will equal 2 × Rd for that object.
Participants in this study consisted of 6 members of several volunteer SAR teams who were attending a class offered by MARG on the use of mapping software in managing lost-person search incidents. The class included a short field segment in which students carried out 1 of the field tasks that they had created; the Northumberland rain dance/Rd measurements were undertaken immediately before that task. For these measurements, participants signed safety release forms that explained the risks of outdoor activities.
The current report employed GraphPad Prism version 5.02 software to perform most of the statistical testing. The University of British Columbia, Vancouver, online calculator was used to propagate the errors in the conversion from Rd to W and POD. 8 The first comparison, between the measured Rd values for each search object (Figure 2), employed a 1-way analysis of variance on the individual searchers’ detection distances, with a Bartlett’s test for equal variances and a Tukey’s multiple comparison posttest (note the statistical package used does not return an exact P-value for the latter, only noting whether it meets P<0.05, P<0.01, etc.). The second (Figure 3), based on the projected PODs and associated propagated errors, employed a 1-way analysis of variance using the projected PODs, propagated SD, and n values for each of the 3 groups, with a Tukey’s multiple comparison posttest. Finally, 1-sample t tests were employed to compare each projected POD with the theoretical 50% POD of the original critical method. Data are expressed as mean±SD. All tests were 2-tailed, with P<0.05 set as the threshold for statistical significance.
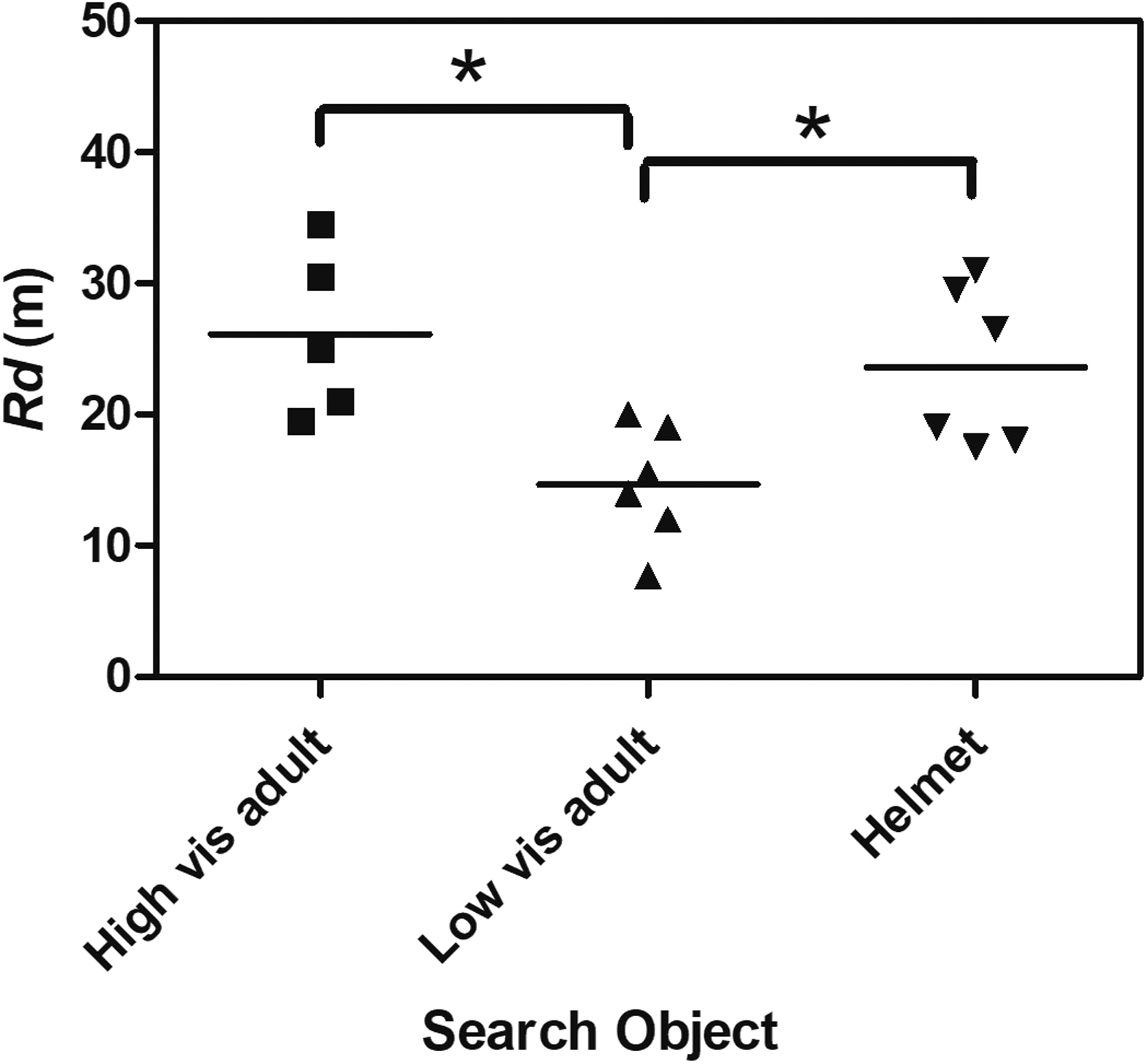
Detection ranges (Rd) for each search object and searcher in meters. Horizontal line is the mean for each object. High vis adult, high-visibility mannequin; low vis adult, low-visibility mannequin; helmet, red helmet. *P<0.05 significance; other differences not significant.
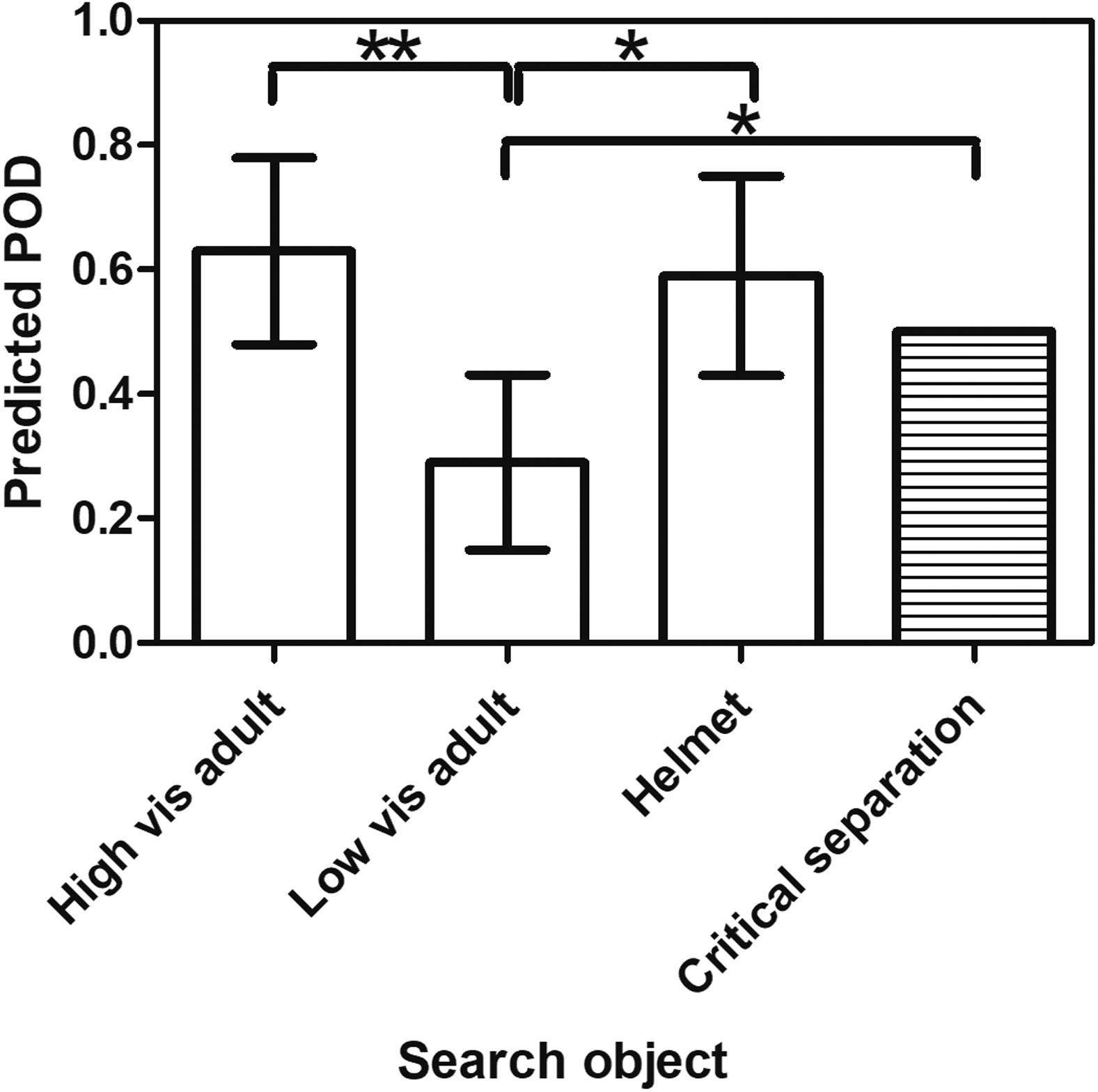
Predicted probability of detection for each search object, compared with the critical separation projection of 50%. Error bars are ±SD. High vis adult, high-visibility mannequin; low vis adult, low-visibility mannequin; helmet, red helmet. *P<0.05; **P<0.01; other differences not significant.
Results
The individual Rds achieved for each search object by each searcher can be found in Table 1. The means of these individual Rds were 26±6 m for the high-visibility mannequin, 15±5 m for the low-visibility mannequin, and 24±6 m for the helmet (Figure 2). These were significantly different (F=6.307, total degrees of freedom [df]=16, P=0.011); the variances within each group were not (Bartlett’s statistic=0.531, P=0.767). In the posttest, the low-visibility mannequin’s Rd was significantly smaller than that for the high-visibility mannequin or the helmet, but the helmet and high-visibility mannequin Rds were not significantly different from each other. From previous results, 6 the multiplication factor for converting from Rd to W for the high-visibility mannequin would be 1.8±0.4 and that for the low-visibility mannequin 1.1±0.4. The contrast between the helmet and the snow led to it being designated “high visibility,” and so its factor would be the same as that of the high-visibility mannequin. Multiplying the Rds by those factors produced predicted Ws of 47±15 m, 16±8 m, and 42±14 m, respectively.
Rd by searcher
Rd, detection range observed for each search object; High vis adult, high-visibility mannequin; low vis adult, low-visibility mannequin; helmet, red helmet; n/d, not determined because intervening vegetation prevented the laser from reaching the search object.
Employing the critical separation method, the spacing between searchers in the search line would therefore be twice the Rd for the helmet, or 47±12 m, as described in the methods. Using the logit conversion described in the methods, the resulting predicted PODs for the high-visibility mannequin, low-visibility mannequin, and helmet would therefore be 67±17%, 32±16%, and 59±16%, respectively (Figure 3). These were significantly different (F=8.803, total df=16, P=0.003); the posttest showed significant differences for the high-visibility vs low-visibility mannequins and for the low-visibility mannequin vs the helmet. Note that the POD was significantly different from the critical separation projection (50%) for the low-visibility search object (t=3.674, df=5, P=0.014) but not for the high-visibility object (t=1.938, df=4, P=0.125) or the helmet (t=1.378, df=5, P=0.227).
Discussion
These results indicate that the critical separation method would produce a fairly high POD in the range of 60 to 70% for a subject in high-visibility clothing, but a lower POD (about half that) for a subject in low-visibility clothing. This compares with the critical separation method’s intended target POD of 50%. The result also depends on the conditions that existed at the search training in November 2018 and the identity and characteristics of the arbitrary object used for the critical separation determination.
Though critical separation has been criticized in some SAR circles for being insufficiently grounded in search theory, the predicted POD for the helmet (59%) in this study is not significantly different from the method’s projected POD of 50%. However, this is a somewhat circular argument because both are relying on predictions of POD rather than direct measurement. One difference is that the earlier model could not take into consideration the observation 2 decades later that the relationship between Rd and W differs depending on how much a given search object’s color contrasts with the background in a given search area. 6
The issue becomes more complex once one considers how well the search object in the rain dance represents the actual subject in a given lost-person search. Certainly, these results suggest the helmet would not provide a good estimate for the W and POD for a subject in low-visibility colors. Although not significant given the small data set in the current study, the difference between the high-visibility mannequin’s POD (63%) and the 50% projection might prove significant with more data.
Critical separation might be expected to provide more valid W predictions for a search area when more search objects, and objects more relevant to the search subject, are used. However, bearing in mind the large errors seen in PODs estimated in the field, it may be that using even a single object would provide more accurate PODs than those acquired through estimation by field searchers, which averaged an absolute error of 23% for a high-visibility search object and 25% for a medium-visibility object in one study (ie, an actual POD of 50% would be erroneously reported as 75% or 25% for the latter on average, with many estimates even less accurate). 3 By comparison, the errors of 9% for the helmet, 17% for the high-visibility search object, and 18% for the low-visibility object projected in the current study are relatively small.
Limitations of The Current Study
The current study only employed measurements of 6 searchers detecting 3 search objects. The ensuing “small data” are statistically vulnerable to outlier results and thus must be regarded as preliminary.
The search objects used in this trial were the standard stuffed Tyvek mannequins previously employed.3,6,7 Although there is a possibility that they may not adequately reflect the difficulty of spotting a supine, unconscious human in the woods, it seems likely that other limitations to the methodology will limit predictability of search effort more strongly. Major examples follow.
A previous report indicated that W can be predicted given Rd, albeit with fairly large uncertainties, particularly with the low-visibility objects (likely owing to the small number of times W has been determined for low-visibility objects). 6 These large uncertainties are manifest in Figure 3. In addition, one should bear in mind that the conversion from W to POD depends on the logit model, which has not yet been validated in the ground SAR context—at least, not to the extent that it has in maritime search.1,2 This is 1 of the most critical open questions currently facing operational search-management methods. It also makes the results in Figure 3 tentative. A larger study, which took into account both hits and misses on search objects the location of which are not known to the searchers to calculate POD directly, will be necessary to validate those conclusions.
Another question that limits the interpretation of the current results is whether the relationships between a rain-dance item—typically, an arbitrary piece of equipment carried by 1 of the searchers—and a search subject, or for that matter between any 2 search objects of different size and color, would be at all consistent. As an example, in a previous study, the high-visibility mannequin had a W 3 times that of the low-visibility mannequin in the summer and 2.5 times in the winter. 7 W relationships between the high- and low-visibility mannequins of 2.1- to 2.6-fold have been reported. 3 If these relationships are not reasonably consistent, it will be difficult to draw conclusions from any field measurement that does not include the exact search object of interest.
It is very important but also difficult to define the target of a given search effort. The search subject is the ultimate goal of a SAR effort, and the mannequins used in this and other sweep-width determinations are arguably the best stand-in short of an actual person (the latter posing logistical problems for repeated measurements). Yet SAR responders also train to look for clues as to the location of the subject (eg, items dropped, footwear impressions).
Although many sweep-width experiments have attempted to address this issue (most commonly employing gloves of varying colors as clues), the extreme variety of potential clues makes determining the relationship between 2 clues far more difficult, particularly because it is often impossible to foresee in a given search effort which objects may become clues. In the case of a critical separation determination before a search effort, the object used for that determination will only be predictive in locating the lost person to the extent that it is similar to an object possessed and dropped by that lost person. (Searchers may well detect an object dropped by the subject regardless of whether the critical separation object represents it, but in the absence of such a detection, search planners will only be able to gauge the POD that would have been expected for the former and use that information for further planning if the critical separation object does represent it.)
The current study used only the mannequins because the initial critical separation method was meant to provide rough estimates of POD for all of the above; thus, comparing it against the mannequins was a far better defined task to address in a single experiment. Quantifying the effects of search-object color, size, and shape on POD beyond those of a human form remains, arguably, an ill-defined task in land SAR research for these reasons.
Finally, perhaps the most important limitation is the open question of whether differences in terrain and vegetation present in even a relatively small search area could vary the W values, and thus the PODs, to the extent that no reliable predictions or after-the-fact analyses will be valid. Simple comparisons of season and vegetation have been made, 7 but it remains to be seen how “portable” a given set of Ws will be in regard to similar environments in neighboring regions, different locales within a region, or even different search assignments in the same area. This is a critical subject for future research, as it is larger than just the sweep-width methodology. If a huge library of data is required to evaluate search effort with any accuracy, such a library may never be assembled and the probabilistic logic behind current methods of search management must be reassessed.
Conclusions
Under the conditions of the current study, critical separation will produce searcher spacing that provides a POD at or above the 50% target for the critical separation method for high-visibility search subjects. The actual POD may be significantly lower for low-visibility subjects. Ultimately, whether the method achieves the target POD will depend on how similar in color, shape, and size the search object used for the critical separation determination is to the target of a given search effort. Nonetheless, the method’s results appear to be more predictable and reliable than the common practice of POD estimation by team leaders.
Footnotes
Acknowledgments
I thank team members from MARG, SAR Ohio, and Allegheny Mountain Rescue Group (AMRG) for volunteering to participate in this experiment; Heather Houlahan for helping to organize the experiment and the subsequent field-search training; and Patty Lindsay for organizing the larger exercise and obtaining the Cheat Lake volunteer fire department meeting hall, food, etc. Special thanks to Coopers Rock State Forest Superintendent Jan Dzierza, Don Scelza, and Patty Lindsay for reviewing this manuscript.
Financial/Material support: The SAR exercise that hosted this experiment received in-kind support from the Cheat Lake volunteer fire department, which offered its meeting hall at no cost; and Fox’s Pizza, Subway, Starbucks, and Kroger of Morgantown, WV. GraphPad donated its Prism statistics software.
Disclosures: None.