
Abstract
The self-reconfigurable modular robot consists of many identical modules. By connecting to/disconnecting from other modules, the whole structure of the robot can transform into arbitrary other configurations. First, the lattice-type self-reconfigurable modular robot is proposed and its disconnected/connected mechanism is analyzed, which can finish self-morphing action. Second, the basic configuration of the module is analyzed with the eigenvector matrix. The motion rules are proposed. Third, the possible motion space is described with the geometric feature of modules which is effective for performing the self-morphing process. Then, the self-morphing motion process is described with the driving function and the adjacency matrix which is useful to solve the computation problem and optimize the motion paths of the robot during the self-reconfigurable morphing process. Final, an experiment of three-module motion and a simulation of multi-module's self-morphing process are shown to prove that the above analyses are effective.
Introduction
Modular self-reconfigurable (MSR) robots consist of a set of standardized electromechanical modules which can dynamically change their geometric structure to complete different task requirements. The MSR robots can be classified as the lattice-type and the chain-type depending on whether their modules use substrate reconfiguration where the modules are placed on a lattice (in either 2D or 3D). Chain-type self-reconfigurable robots have a higher degree of mobility than lattice-type systems do, because the degrees of freedom of chain-type robots are often less constrained than those of lattice-type systems. Lattice-type robots, on the other hand, can easily self-reconfigure and are suitable for forming various static configurations, but they have difficulty in generating motion.
Recently, the research on three-dimensional model has made remarkable progress and many types of robots have been proposed. There are two classes of three-dimensional systems, a class based on lattice systems and a class of linear or string systems. In the former class, the shape of a module is determined by the lattice systems, such as a cubic structure (3-D self-reconfigurable mechanical system) (Murata, S., Yoshida, E., etc, 2001), Fracta 3D (Murata, S., Kurakawa, H., etc, 1998), two hemispheres joined modules (ATRON)(Christensen, D., C., 2006), Telecube(Suh, J. W., Homans, S. B., & Yim, M. H., 2002), the crystal module (Crystalline) (Bulter, Z., & Rus, D., 2003), the “I-Cube” modules (I-Cube) (Unsal, C., & Khosla, P. K., 2000), the rhombic dodecahedron modules (Proteo) (Yim, M., Zhang, Y., etc, 2001), two semi-cylindrical parts (M-TRAN) (Kurokawa, H., Tomita, K., 2008) and M-Cube (Fei, Y.Q., & Zhao, X.F., 2007), (Fei, Y.Q., Zhang, X., & Xia, Z.X., 2009). The latter class of system is a linear or string-type system, such as the cubic modules (Polybot) (Yim, M., Zhang, Y., etc, 2002), the tetrahedral and octahedral modules (Tetrobot) (Hamlin, G. J., & Sanderson, A. C., 1998), CONRO (Castano, A., & Will, P., 2000) and so on.
In this paper, we describe the configuration of a 3-D, like cubic shape, lattice MSR robot called M-Cubes. Its mechanical structure is presented, which can finish self-morphing and self-repairing actions when bad modules appear. The motion rules are proposed. Then, the possible motion space is described with the geometric feature of modules. Thus, each module can calculate its next position according to its neighboring modules and the corresponding three-module motion can be chosen, which is useful for finishing the self-morphing process.
Module hardware
Structure of module
The lattice-type self-reconfigurable modular robot “M-Cubes” (Modular-Cubes) is proposed. Its inner structure and connecting/disconnecting mechanism are different from those of Fracta 3D (S. Murata, H. Kurakawa, etc, 1998). Each module composed of a central cube and six rotary arms distributed on the six sides of the central cube (Fei, Y.Q., Zhang, X., & Xia, Z.X., 2009), as shown in Fig. 1. The rotary arm has a connection shaft and a connection hole. The connection shaft has a lock system, which can lock the connection when the shaft is inserted into other module's hole. Then, two modules can connect to each other firmly. The connecting arm can rotate along its axis.

M-Cubes module
Figure 2 shows the inner mechanics of the M-Cubes module. There's a DC motor in the central cube, which is the power supply of the connecting arms. The rotation of the motor is transmitted to the six transmission shafts by a gear system. There's a clutch on each transmission shaft to control whether the connecting arm should rotate or not.

Inside mechanics of M-Cubes module
The disconnected and connected mechanism is one of the crucial components of a reconnectable module. Due to the unique features of reconfigurable robots, such a mechanism must be power efficient, reliable, compact and flexible to operate.
Each rotary arm (Fig.1, Fig.2.) can connect with/disconnect from other modules. When the robot system needs to finish self-morphing or self-repairing action, the reconnectable side (rotary arm) can finish connecting with or disconnecting from its neighboring side. Especially, when the bad module appears, the reconnectable sides can finish the self-repairing action. If a module is damaged, its neighbors should be able to disconnect it from the system without any constraints from the damaged module. For these purposes, we have designed the disconnected/connected mechanism that allows disconnection to be accomplished at either side of the connection. This is critical for a self-reconfigurable robot to finish the self-morphing action or discard any damaged modules for self-repairing action.
Figure 3 shows this disconnected/connected mechanism of a module. Each rotary arm (reconnectable side) consists of one expansile hole (connection hole) (Fig.4) and one extension peg (connection peg) (Fig.5). The expansile hole mainly consists of two connecting grippers, one cover, one sleeve, one track and one screw rod (Fig.4 c). The hole can open and change its shape when its neighboring module is bad and it needs to disconnect from the bad module and finish the self-repairing action (Fig.4). Generally, the hole keeps closed state (Fig.4 a). When the connection/disconnection appears among good modules, the expansile hole does not open. When a good module wants to disconnect from the bad module, the hole of the good module is open (Fig.4 b) and disconnect from the bad module. Then, this hole returns to its closed state again. When a good module wants to connect to the bad module, the hole of the good module is open and connects to the bad module. Then, this hole returns to its closed state again.
The disconnected/connected mechanism of a module

The structure of one expansile hole
The diagram of one extension peg
The extension peg mainly consists of three beads, a pin, a shell and a piston (Fig.5 b). The hole can accept and lock the incoming peg by meanings of beads. The hole can release a lock by releasing the beads of a good module or open the hole when its neighboring module is bad.
It is important to find an unambiguous, valid and accurate module representation to reduce the M-Cubes system computation and simplify the complexity of the control algorithm in the self-reconfigurable morphing process. Many researchers successfully apply topology theory to solve the module representation. A remarkable effort to formalize this representation was made by Castano and Will (Castano, A., etc, 2002, 2001). They discovered and identified a robot configuration by using graphs and digraphs, and then applied this methodology to the Conro robot. Saidani proposed a distributed algorithm which transforms a quadruped robot into a chain by defining the notion of the graph topodynamics (Saidani, S., 2004).
In the M-Cubes system, a module is represented as a vertex, and a connection between modules as an edge.
Single module
To express clearly the position of each module, the coordinate systems are set up (Fig. 6). ∑ o is a global coordinate system. ∑ i (i=1, 2,…n) is the local coordinate system whose origin is at the center of each module and whose axes are vertical to rotary sides. A line from the center of the peg to the center of the hole is defined as the peg-hole line (Fig. 7). In order to understand the state of each rotary side, the eigenvector matrix is used to describe each module.

The coordinate system
The peg-hole line
For the rotary sides which are vertical to the axis X: If the peg-hole line points to the direction of the axis Z, the state is 1, or else it is −1. If the peg-hole line points to the direction of the axis Y, the state is 2, or else it is −2.
For the rotary sides which are vertical to the axis Y: If the peg-hole line points to the direction of the axis Z, the state is 1, or else it is −1. If the peg-hole line points to the direction of the axis X, the state is 2, or else it is −2.
For the rotary sides which are vertical to the axis Z: If the peg-hole line points to the direction of the axis X, the state is 1, or else it is −1. If the peg-hole line points to the direction of the axis Y, the state is 2, or else it is −2.
Each module can be depicted with eigenvector Li (s1, s2, s3, s4, s5, s6) (s j denoting eigenvalue, j=1,2,3,4,5,6, s1 is on +X side, s2 is on -X side, s3 is on -Y side, s4 is on +Y side, s5 is on +Z side, s6 is on -Z side,). In order to obtain the state of each rotary side from the topology graph, we give some rules. The solid arrow detaching from this, s j represents 1 and the virtual one represents −1. The solid arrow pointing to this side, s j represents 2, and the virtual one represents −2.
For multi-module system, the following rules are given:
If there is nothing on the rotary side, the value of s
j
is 0 and the arrow is not used. If there is an obstacle on the rotary side, the value of s
j
is 4 and the arrow is not used. If two modules are connected, the values of s
j
in the two connecting sides are 3. The two sides are connected with a solid line. If there is a module on some rotary side but they are not connected. The above rules are used.
Thus, the self-reconfigurable robot with n modules can be described with nx6 eigenvector matrix (Fig. 8).

The topological structure of 12-module robot system
From (1), the configuration of the self-reconfogurable robot with 12 modules (Fig. 8) can be obtained.
According to the geometric feature of the self-reconfigurable robot, there are three kinds of motion: single module motion, two-module motion and three-module motion.
Single module motion
There are six sides in each module. Each side can rotate 90°, −90° and 180° (Fig. 9). Thus, there are 18 kinds of single module motion.

Basic motion of single module
We use rotP(m i , pα, θ) to describe the single module motion. Here rotP stands for the single module motion, m i stands for the i-th module, (i = 1, 2, …, n), pα stands for the rotary sides (α = 1, 2,…,6), θ stands for the rotary angles (θ= 90°, −90° or 180°).
There are two kinds of two-module motion. One is connection or disconnection between two modules. We use conP (m i , m j , piα, pjβ) or disconP (m i , m j , piα, pjβ) to describe this kind of motion, respectively. Here i, j = 1, 2,…, n; α, β = 1, 2, …, 6, m i , m j stand for two neighboring modules, piα, pjβ stand for the rotary sides. The other is the rotary motion between two modules (Fig. 10). We use rotM(m i , m j , piα, θ) to describe this kind of motion. Here rotM stands for the rotary motion, m j stands for the basic module (j=1,2,…n and j≠i), θ stands for the rotary angle between two modules.

Rotary motion of two modules
Three-module motion can really change the positions of the modules. Three modules are named as follows: a base module, a rotary axis module and a motion module. In the XY plane, there are three kinds of three-module motion (Fig. 11). In Fig. 11 a, the rotary axis module rotates 90° or −270°. In Fig. 11 b, the rotary axis module rotates −90° or 270°. In Fig. 11 c, the rotary axis module rotates ±180°.
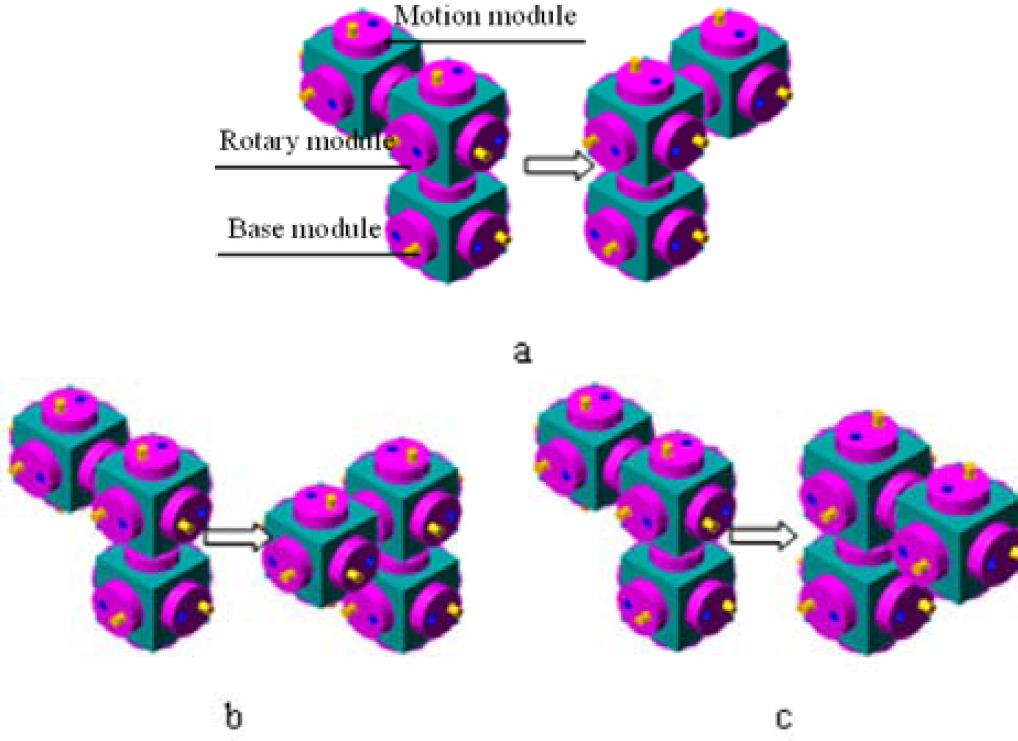
Three-module motion
We can use movM (m i , m j , m k , θ) to describe the three-module motion. Here movM stands for the three-module motion. m j stands for the base module. m k stands for the rotary axis module, j,k=1, 2,… n, j ≠k≠i. θ stands for the rotary angle between two modules.
According to the rules of the chessboard and the basic motion of modules, single module of the lattice-type self-reconfigurable robot can change its space position only with its neighboring modules. In order to perform the morphing motion of the lattice-type self-reconfigurable robot, all possible spaces' positions which the module can arrive at must be studied. Then the self-morphing process can be done.
The motion space of the self-reconfigurable robot can be divided into several small cubes which are same as modules. The coordinate system (Fig.12) can be set up. The origin of the coordinate system is on the center of one bottom module. Assuming each module is a 1×1×1 cube, the center coordinate of each module can be marked. All possible motion spaces of modules can be described with these coordinates

Motion space of self-reconfigurable robot
Each module can move in the XY plane, YZ plane and XZ plane. We will describe the possible motion spaces of modules in the XY plane, the other two are the same. In Fig.13, the rotary module and the base module are superposed. In the XY plane, there are four possible rotary axes around one module. According to the number and the position of the axes, the possible motion spaces of modules are not the same. Assuming the coordinate of the motion module is (x, y, z).
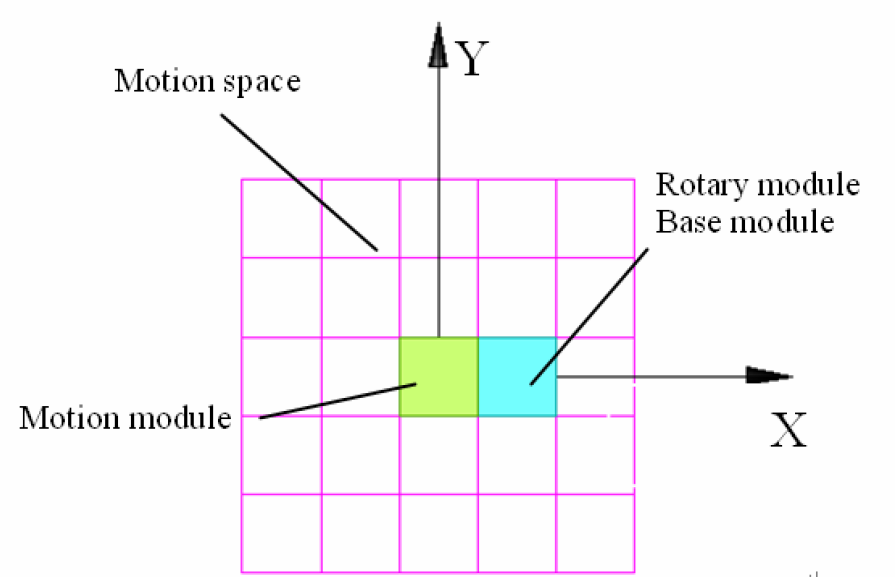
Module's motion space
If there are four rotary axes around the motion module, the module cannot move in the XY plane. Thus, the possible motion space is 0.
If there are three rotary axes around the motion module, the possible motion spaces are (x±1, y±1,z), (x, y±2,z), (x+2,y, z)(Fig.14 a). (x±2, y, z), (x±1, y±1,z), (x, y+2, z)(Fig.14 b). Each has four kinds of motion spaces.
If there are two rotary axes around the motion module, there are three kinds of layout. Thus, the possible motion spaces are:
(x±1, y±1,z), (x±2, y, z) (Fig.15 a); (x+2, y, z), (x, y+2, z), (x±1, y+1, z) and (x+1, y−1,z) (Fig.15 b), (x, y−2, z), (x+2, y, z), (x±1, y−1,z) and (x+1, y+1,z) (Fig.15 c); In Fig.15 a, each module has six kinds of possible motion spaces. In other figures, each module only has five kinds of possible motion spaces.
If there is only one rotary axis around the motion module, there are one kind of layout. Thus, the possible motion spaces are: (x+1, y±1,z), (x+2, y, z). Each module has three kinds of possible motion spaces.

The motion space in the XY plane of module that has 3 axes

The motion space in the XY plane of module that has 2 axes

The motion space in the XY plane of module that has one axis
According to the above analysis, if there are two rotary axes around the motion module, there are the most possible motion spaces. If there are more or less two rotary axes around the motion module, it is not benefit to the movement of the module. With one or two three-module motion, modules can arrive at their next position. In order to perform the morphing process, the possible motion spaces must be obtained. Thus, each module can calculate its next position according to its neighboring modules and the corresponding three-module motion can be chosen.
Self-morphing Motion Planning Algorithm
The M-Cubes system is a nonlinear system with multi-degree of freedom. As more modules are added to the system, the possible reconfiguration of a group of modules from an initial configuration to a final configuration based on some constraints increases exponentially. This leads to computational complexity in determining an optimal or a near optimal method. So a morphing method based on a driving function and the adjacency matrix is selected to give a near optimal solution. In the initial reconfiguration phase, the driving function is utilized to drive modules to the geometry center of the final configuration based on the local rules. Compared with the method used in (Tomita, K., Murata, S. & Yoshida, E. 1998), (Yoshida, E., Murata, S. & Kurokawa, H. 1998, 2001), our method based on the local rules can reduce the system computation. When a module reaches the vicinity of the final configuration's geometric center, the driving function dies and the adjacency matrix will be used to compute the steps from each module position to the present goal position, and then the minimal steps are selected. By repeatedly adjusting modules coincidence with unoccupied objective position, the final configuration can be completed. The geometric center G g of the final configuration and the distance S t i between the center of module i and G g at time t can be expressed as follows:


The difference between S t i and St+1 i could be used as the driving function f i =S t i -St+1 i . When module i moves to one direction so that the value of f i is bigger, this motion direction will be more encouraged. If the value of f i is negative, this motion direction will be discouraged.
The motion priority in the reconfiguration process is shown in equation (4)

The motion priority of a module is decided by two factors: S t i , Λ t i . Λ t i is utilized to express the number of the neighborhood module connecting with module i at time t, called the degree of module i at time t. In other words, Λ t i indicates the edge number of the node m i connecting with the other nodes. Obviously, if a module is farther from the center of the final configuration or the number of Λ t i for this module is smaller, this module has more motion priority. Different value of coefficient α, β will influence different reconfiguration sequence between modules, and then bring into being different possible motion paths and steps when the system completes the final configuration. As a result of our experiments, the right value of coefficient α, β are decided by the module number of the robot system and the distance between the start location and the goal location.
In the start phase, control of the reconfiguration consists of the following three steps. Each module (1) tests if it is movable and, if so, calculates the value of δ i (t); (2) compares the value of δ i (t) with neighboring modules by the local communication. If the value of δ i (t) is biggest in the neighboring modules, module i calculates all the reachable positions and prepares for moving. If the value of δ i (t) is equal to that of some neighboring modules but bigger than that of the others, the system randomly selects one of modules having biggest priority value and prepares for moving this module; (3) calculates the value of f i in all the reachable positions. If all values are negative numbers, this module stops moving. If some values are positive numbers, module i moves to the position producing bigger value of f i .
There will be at least one module motion at one time based on above rules. Parallelism insures the stabilization and scalability of the system. When module i reaches at most one unit distance from the center of final configuration (S
t
i
⩽1), the system changes the control algorithm and starts another control algorithm to complete the final configuration. In order to select minimal steps to reach the desired location, we define the following lattices space set:
S
t
m
is the lattice space set that the configuration at time t is occupying. S
t
p
is the unoccupied lattice space set at time t that movable modules in the present configuration can reach in only one reconfiguration process. Obviously, S
t
m
∩S
t
p
=Ø. S
f
is the lattice space set that the final configuration possesses.
Based on the above three sets, four intersections are defined as follows:

Depth first search algorithm can be used to find the topology structure of S
t
j
. The adjacency matrix A
t
can be expressed as (5):

K is the element number of set S t j . V i is the lattice space of set S t j . At time t, if a module at the lattice space V i can reach the lattice space V j in only one step, a t ij is equal to 1.
If it cannot, a
t
ij
is 0. If a module at the lattice space V
i
cannot reach the lattice space V
j
under any circumstances, a
t
ij
is ∞. The adjacency matrix A
t
is utilized to represent in how many steps a module reach another lattice space of set S
t
j
. The system planner only moves non-overlapped modules in set S
t
q
to non-overlapped module positions in set S
f
until the reconfiguration is complete. If a
t
ij
is equal to 1 and V
i
∈S
t
q
, V
j
∈S
t
n
, the system planner moves module i to the position V
j
. If the above condition does not exist, the system planner computes the square of A
t
as follows.

Where

It can be seen by equation (7) that a t il a t lj is not equal to 0 under condition that only a t il and a t lj are 1. It means if a t il a t lj is not equal to 0, the module can start from position V i , via position V l , then to position V j . So the value of (a t ij )2 denotes how many paths the module can start from position V i to position V j in two steps. If modules in set S t q cannot reach the position in set S t n in one step, the system planner computes (A t )2 and tries to find if there is a path finish the task. If it cannot, the system planner continues to compute (A t )3 and so on until the module in position V i moves to the goal position V j . The final configuration will be competed by repeating the above reconfiguration process.
An experiment about the basic motion of a three-module self-reconfigurable robot is shown in Fig.17. Only one module cannot change its own position. There should be at least 3 modules if the position of one module needs to be changed. As shown in Fig. 17 a, the rotary arm of module 1 that connects to module 2 rotates along its own axis so that module 2 rotates with it. Because module 2 has a firm connection to module 3 by one of its arms, module 3 rotates as well. Consequently, the position of module 3 is changed, while the positions of module 2 and module 1 remain the same as before, shown in Fig.17 b. This is the basic morphing motion of M-Cubes modules.

Basic morphing motion of a three-module self-reconfigurable robot
Simulation of the self-morphing process
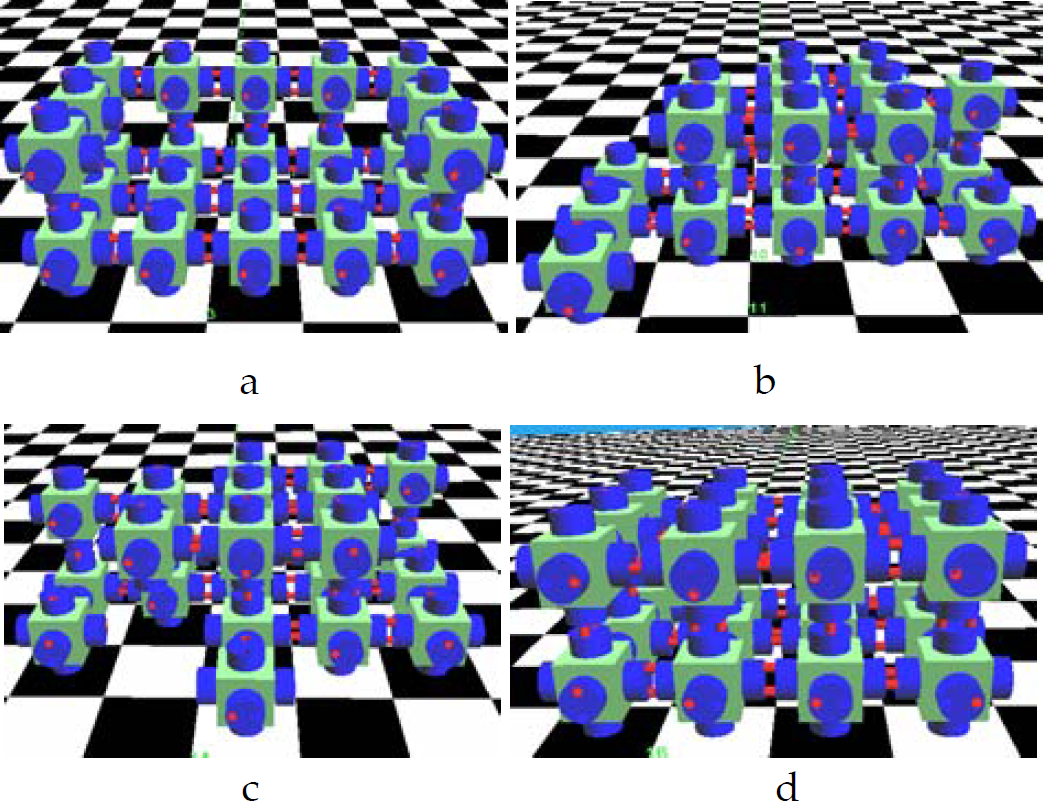
A simulation of the self-morphing process is shown in Fig. 18 under condition that gravity, friction and inertia etc are negligible. The initial configuration is the couch-shaped (Fig.18.a). Fig. 18.b shows snapshots of the first self-morphing phase. Fig. 18.c is a snapshot showing that a module reaches at most one unit distance from the center of final configuration. Fig. 18.d shows the final configuration. The simulation results prove that above self-morphing algorithm is highly efficient.
In this paper, we have presented a lattice, self-reconfigurable modular robot. Each module composes of a central cube and six rotary arms. On each rotary arm, there are one expansile hole (connection hole) and one extension peg (connection peg). This structure can make the modular robot system finish self-morphing or self-repairing action when the bad modules appear. The basic configuration of the modules is analyzed with the eigenvector matrix. The model can express information on modules position, connecting relationship and so on. The possible motion rules are proposed. And the possible motion space based on the geometric feature is described which is useful to finish the self-morphing process in the lattice-type self-reconfigurable robot. Then, a new self-morphing motion method based on the driving function and the adjacency matrix is described. The method provides a shortest path from the initial configuration to the final configuration. Finally, an experiment about the basic morphing motion of a three-module self-reconfigurable robot is presented, and a simulation of multi-module self-morphing motion process is shown to prove that the analyses are effective.
Footnotes
8.
This work is supported by NSFC Grant 50305021, 50775145 and State Key Laboratory of Robotics (No.RL0200906).