
Abstract
In this paper, a human-machine shared stability control strategy is proposed for a walking-chair robot with human in the loop. We consider the human in the loop as the torso of the robot and human movement as disturbance control to the system stability. Then the safe input regions for joints are given based on the zero moment point(ZMP) criterion. The control inputs to the system are defined according to the safe input regions. When the system state stays in the safe region, the control input select the human input. When the system state leaves the safe region, a safe control is determined according to the safe input set and the human input, which changes with the different system states. The control input is determined to be the combination of the human input and the safe control. Smooth transition from human input to snapped safe input is achieved so as to guarantee the rubust of the stabilitiy control. Simulation is done to analyze the influence of human input on system stability. The results show that the strategy increase the system stability with human in the loop.
1. Introduction
In recent years, the researches on the robots are actively executed to help the aged and disabled. Considering that conventional wheelchairs are restricted their movements in complicated environments, bipedal robots can be used as the alternative for the people with handicap of walking. Bipedal robots have better mobility than wheeled robots, especially for moving on rough terrain, steep stairs or in obstacle environments. Toyota developed the i-foot robot as a walking, mountable personal transportcapable of three-dimensional mobility. The biped locomotor WL-16 was developed which can walk up and down stairs (Yusuke, S.; Takuya, H. & Yutaka M. et al., 2004). A walkig-chair robot named JWCR-1 was developed in our laboratory (Zheng, Cheng-Yi; Zhao, Qun-Fei; Ma, Pei-Sun; Zhang, Hui-Qing & Gou, Zheng, 2006) (Cao, Xi; Zhao Qunfei & Ma, Peisun, 2007). However, with their widespread use comes the concern for complicated conditions. Faults in robot's control are difficult to be predicted and possible aberrant behavior of a robot is potentially dangerous to human personnel in its vicinity. In order for bipedal robots to succeed in the real world, stability control is necessary. The stability control for human-carrying walking robot is more complex and difficult than for conventional humanoid because the human can influence the stability by control input or body motion. The human and robot can be considered as a closed control loop in stability study and the influece of human can not be ignored. The term “human in the loop” refers to systems where an operator controls a device with a desired task. The operator acts on the device depending on information received from it and the environment. The control method with human in the loop is the alternative because the human operator in the control loop is capable of generating control signals adaptive to task and workspace variations. The walking stability control of tradational bipedal robots has been studied for many years (Huai, Chuangfeng & Feng, Yuefa, 2006) (Hurmuzlu, Y.; Genot, F. & Brogliato, B., 2004) (Lim, Hun-ok; Yamamoto, Yousuke & Takanishi, Atsuo, 2000), nevertheless, most of them focus on the humanoid robots without considering the condition of human on the robot. The fundamental control problems with human in the loop have still not been solved in the related papers.
The main purpose of this paper is to propose a shared control strategy with a human in the loop to guarantee system stability. This paper falls into the category of human-machine shared stability control. Human-machine interaction as an attractive research area has been studied extensively in the papers with both military and civilian applications (Downes, Patrick M.; Michael, J.; Kwinn Jr. & and Brown, Donald E., 2004). Our approach rests on several seemingly loosely related theoretical foundations, that is, control with human in the loop (Ren, Wei & Beard, Randal W. 2005), zero moment point (ZMP) based stability control (Vukobratovic, M. & Borovac, B., 2004), and reactive control techniques. We use ZMP to define safe regions for the system, a “safe input set” can be defined accordingly, which corresponds to all safe controls for these regions. If the system is within a specified safe region, the human input will be used as the control input to the system even if it is outside the safe input set. If the system is outside the specified safe region, the human input will be snapped to the safe input set. In this case, the actual control input to the system will be the closest control element in the safe input set. The basic idea behind this approach is that both system stability and basic performance are guaranteed in the presence of human inputs. Simulations are performed and their results prove the validity of the proposed method. All the research work is based on the walking-chair robot JWCR-1 we developed for the aged or handicapped.
2. ZMP Based Safe Input Set
2.1. The Biped Walking-Chair Robot
The bipedal walking-chair robot JWCR-1 we adopt as our experiment apparatus is shown in Fig. 1, which can accomplish humanoid walking, assist the handicapped to walk on the flat or brae, avoid the obstacle or up and down the stairs. It is composed of a torso and two identical legs. Human fixed in the chair can be considered as the torso with 3 degree of freedom (DOF) on the pitch-axis, roll-axis and yaw-axis. Each leg has 6 DOF. As for the control system, 12 DC servo motors are centrally controlled through Baldor NextMovePCI2 by the control computer. The control computer is installed at the back of the waist.

JWCR-1 robot
The biped robot with human in the loop is modeled with 12-DOF system using the multi-body dynamics method in three dimensional planes as shown in Fig. 2 and Fig. 3. The posture change of human body can be considered as sway around the joint. The motion of biped robots is generated by synchronizing two planar motions. Models in these two planes called sagittal and lateral plane. The origin of the absolute coordinate system coincides with the ankle joint of the supporting leg.

Model in Sagittal Plane with Human in the Loop
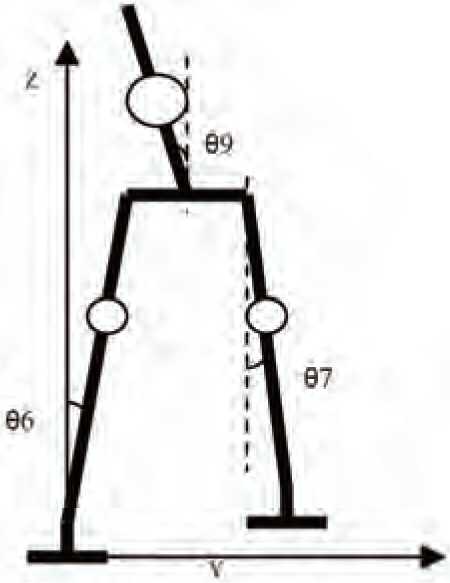
Model in Lateral Plane with Human in the Loop
To reduce the work of human operator as much as possible, the robot moves automatically by following working program given to the computer in advance. While the robot is moved by the computer, human operator observes the change of the environment and the robot motion. When the information given in advance is not accurate or there are some changing in the environment, the human operator overrides the computer operation to correct the motion of the robot by using the joystick.
2.2. ZMP Based Safe Region
To ensure the stability of a biped robot, it is needed that the foot of the supporting leg is stationary on the ground during the motion in each step. Methods of walking pattern synthesis based on ZMP have been proposed. The ZMP method has been proposed first by Vukobratovic. The ZMP stability criteria states that the biped will not fall down as long as the ZMP remains inside the convex hull of the foot-support. The ZMP is defined as the point on the ground about which the sum of all the moments of the active forces equals zero. If the ZMP is within the convex hull of all contact points between the feet and the ground, the biped robot is possible to walk. Hereafter, this convex hull of all contact points is called the stable region. Basically, these investigations first design a desired ZMP trajectory, then derive the hip motion or torso motion required to achieve that ZMP trajectory. One difficulty in the control of biped robot is to avoid an unexpected rotation of the supporting feet, thus the ZMP must be inside the supporting sole.
The human resultant force F⇀ D = f x i⇀ + f y j⇀ + f z k⇀ and moment M⇀ D = τ x i⇀ + τ y j⇀ + τ z k⇀ act at point D, the ZMP at point P. The coordinates of ZMP with human in the loop in sagittal plane and lateral plane can be represented as follows (Huang, Q.; Yokoi, K.; Kajita, S.; Kaneko, K.; Arai, H.; Koyachi, N. & Tanie, K., 2001),

where m i are masses of link-i, n=7, (x i , y i , z i ) are positions of the masses of link-i, I i are matrix of moment inertia, ω i are angular velocity vector, g̅ is gravity acceleration vector, (x zmp , y zmp , 0) is the coordinates of point P, The subscript ‘i’ means the part of system which marks the number ‘i’ in the model. From above equations it is clear that when human in the loop changes posture, he changes the forces on the robot as while then he changes the coordinates of the ZMP.
The human in the loop provides two kinds of control input via joystick and body motion respectively. The kind of control input via joystick operates the robot to start, stop, change the velocity or complete some special action such as up and down the stairs. Both kinds of input change the ZMP of the system and then change the stability of system. Define these two kinds of input X 1 and X 2 as

Where θ i is the angular of the joint. According to the model shown as figure 2, we can get the relationship function F 1 and F 2 to replace motion parameters in equation (1) with X 1 and X 2 .

Let X = (X1 T : X2 T ) T be the human input set. The motion parameters in equation (1) can be replaced according to equation (3), and the ZMP of the system can be defined as

When we plan the walking pattern of the biped robot, the human influence can not be forecasted to determine the parameters. The minimum distance between the ZMP and the boundary of the stable region is called the stability margin. Let [S bx , S fx ] be the stable region in sagittal plane, and [S by , S fy ] be the stable region in lateral plane. According to the definition the stable regions during a walking period are shown as Fig. 4 and Fig. 5. Where D s is step length, W is the space between center of left and right foots. The shadow region means the effective stable region.

Stable Region during Single Support State.

Stable Region during Double Support State.
Then we can define the safe input set of human in the loop according to this criterion. The safe criterion can be defined as follows:

In the gait planning of the biped robot without considering human control, the robot input is designed in stable region. If D>0, it means the human input is in safe region and the robot will walks according to the input control information. Otherwise the human input is outside the safe region, the robot is dangerous to tip over. In this case, the system will overridden the control input to guarantee the safe while satisfy the human willingness. In this section, we propose an approach to stability shared control. The basic idea behind this approach is that both system stability and minimum levels of performance are guaranteed in the presence of human inputs.
3. Human-machine Shared Control
In the Biped Walking-Chair Robot system with human in the loop the user and machine must share control. The user is responsible for high-level control of the system, such as route-planning and some navigation actions, while the machine overrides unsafe maneuvers. The main theme of our approach is to preserve human intention as much as possible while guaranteeing system stability. The system attempts to change the user's command as little as possible while insuring safe, effective travel. In addition to jointly determining the motor command, the user and the robot must be able to cooperatively adapt to changes in environmental or function conditions. Human users adapt rapidly and naturally but machines must be programmed to adapt in response to changes in measurable variables. The sensors equipped on the robot feedback the motion information of the whole system according to which the robot's gait is adjusted in real time. This makes human-machine co-adaptation difficult, because it requires that the machine monitor user adaptation in real time.
We consider a control scenario a human controls the biped robot in a room. We want to give the human authority and flexibility to drive the robot but modify or override his or her control under hazardous situations. The mechanism of shared control system with human in the loop is shown as Fig. 6. The human operator controls the joystick and his or her body moves to provide the control input X which is judged to select safe control mode. If the robot is safe, that is, its states are within the safe set, the human input will be adopted to control the robot. Otherwise, the human input X will be overridden by a new control element, detailed in the sequel, in the safe set.
We define the safe region for X as R(c) = {X : D(X) ≥ c}. Where c represents the tolerance for stabilitying with c > 0 and can be specified based on the design requirement. Accordingly, define the safe input set as

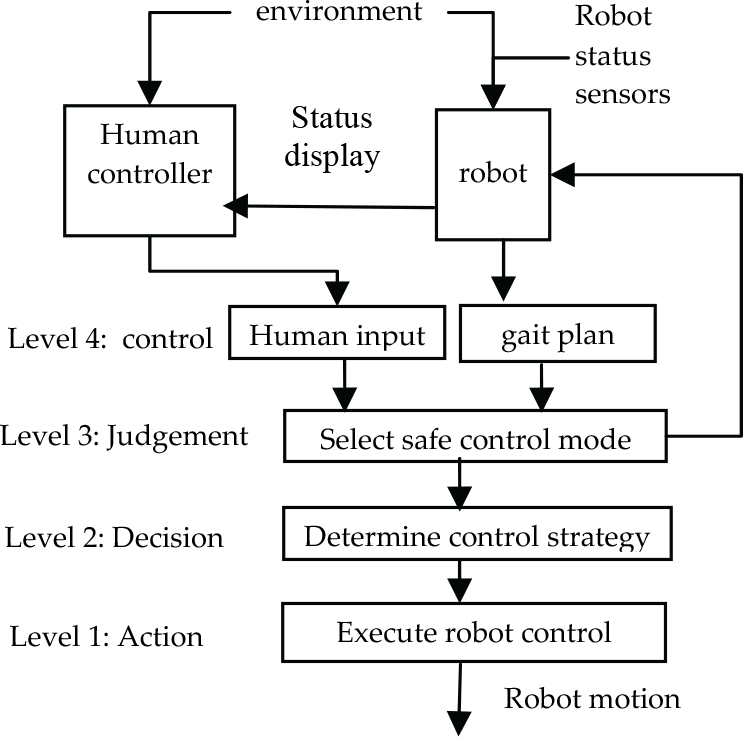
Mechanism of Shared Control System
The overall static safe region can be constructed as R s (c) = ∩i=1 K R i (c i ), where c = [c1, ···, c K ] T , K represent to 3n+6, and the overall static safe input set can be constructed as U s (X) = ∩i=1 K U i (X). Note that in the above research for the safe input i set, we did not consider the possible input constraints for the system, which can be incorporated conveniently by constraining X ∈ R sc , where R sc is the constraint set for the input.
Note that X ∈ IR
K
and X1 ∈ IR
m
. The input X2 can not be changed by the robot. Define the robot control input to overridden X
1
as

and the new control input can be constructed as X r = (X3 T X2 T ) T . Therefore, the safe region for X r can be defined as U r = {X r : X3 ∈ U3}, U3 = {u : (u T X2 T ) T ∈ U}. Define the continuous scalar function k : IR m → [0, 1] as follows:
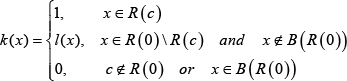
Where B (•) represents the boundary of safe region, ε = (ε1 … ε m ) T with ε i > 0, and l(x) ∈ [0 1] can be any continuous function in x. The introduction of function l(x) defines a smooth transition from human input to snapped control input when the system starts moving out of the safe region. Accordingly, the control input can be defined as

Where d(X1) is the safe control snapped from the human input to the safe input set U given by

From Eq. (8), we can see that the control input to the system is the human input when the system state stays in the safe region and is switched to the safe control when the system state leaves the safe region. When the human input is overridden in unsafe regions, the control input X r to the system approximates the human input as closely as possible from the safe input set. The function k(x) in Eq. (7) can be constructed based on design requirements. The tolerance vector c in Eq. (7) guarantees transition from human input to the safe control starts when the system state is close to the boundary of the safe region. Even with the system state outside the safe region, if the human input is within the safe set, it will be the input to the system. Otherwise, the closest element in the set will be chosen as the input to the system. Human in the loop can compensate the system instability to keep the system safe.
4. Simulation and Evaluation
As noted above, the human input X2 is unpredictable and can not be changed by the robot. Its influence on the system stability is necessary to be analyzed. Considering that robot walks in the sagittal level plane, human body swings to disturb the stability of the system. The influence can be described by three motion parameters: swing angle θ8, angular velocity Θ̇8 and angular acceleration Θ̈8. There is

According to the model, human is considered as a pole swing around the joint with the chair. Let θ8 ∈ [0, π/6] rad, Θ̇8 ∈ [0, 6] rad/s, Θ̈8 ∈ [0, 6] rad / s2 be the constraints. The walking pattern is periodic, therefore only two adjacent periods is considered. The predefined parameters T c =2/s, D s =0.3m, X sd =0.09m, X ed =0.09m. The simulation results are as followed.
The influence of θ8 is shown as Fig. 7, from which we can see the change of the safe criterion D(X) due to θ8. We chose four θ8 value and project the results as Fig. 8 to identify the influence of θ8 on the system. It's clear that bigger θ8 value cause smaller safe criterion D(X). Given the tolerance for the stabilitying c=0.03 for example, we can get the safe region for θ8 as R(0.03) = {θ8 : D (θ8)> 0.03}. As shown in Fig. 7, In one walking period, when time t ∈ [0, T1], any θ8 with constraints θ8 ∈ [0, π/6] rad is a safe input. 8 When t ∈ [T1, T2], big θ8 will be outside of safe region and cause the system destabilization. According to the shared control with human in the loop discussed above, the robot gait is revised to adjust ZMP and stable regions to keep the system safe when human input is outside the safe region. The adjusted result is shown as Fig. 9.
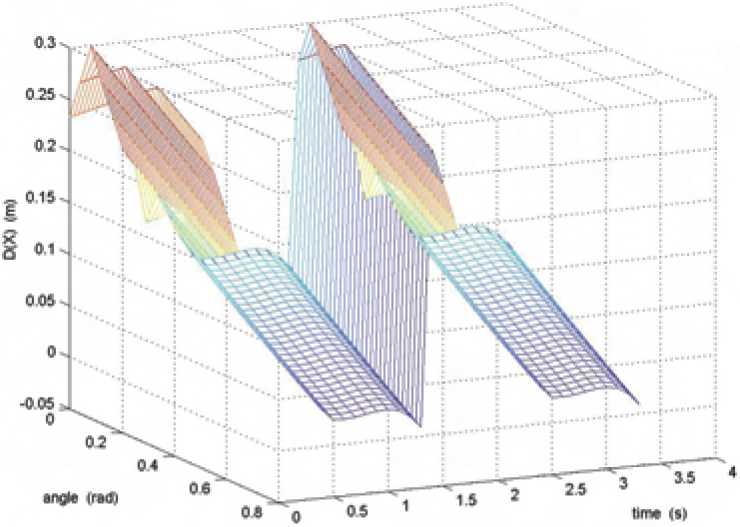
Influence of human swing angle θ8 on the stability
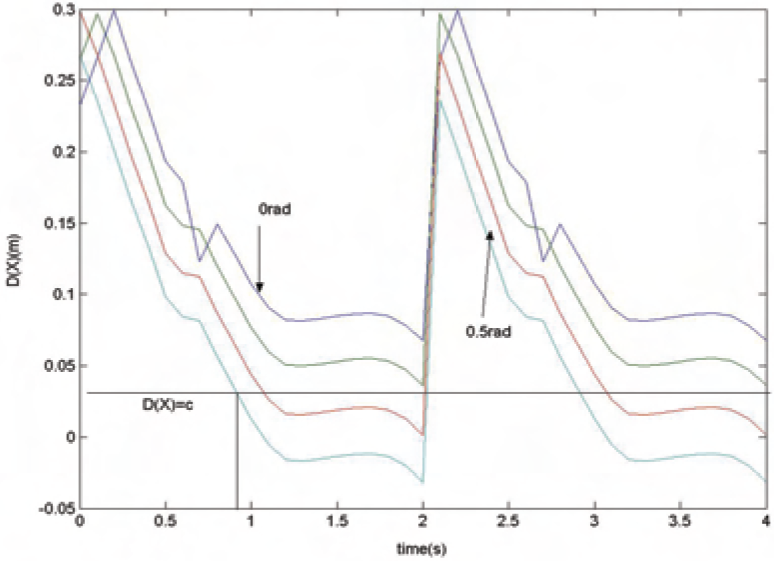
Projection of D(X) with different θ8

Projection of D(X) with adjustment
We can see the influences of human angular velocity and acceleration similarly which are shown as Fig. 10 and Fig. 11. The results indicate that any input in the constraints is the safe input for Θ̇8 and Θ̈8. From the simulation, we can gain the conclusion that human swing angle have more influence on system's stability than the others, followed with human angular accelerations and human angular velocity. The ZMP moves to the same direction with the human body, and the accelerations make a reverse influence on the ZMP. Swing with large scope or high frequency makes the negative influence on the stability of system, while swing with slow velocity and small scope has positive influence on the stability.
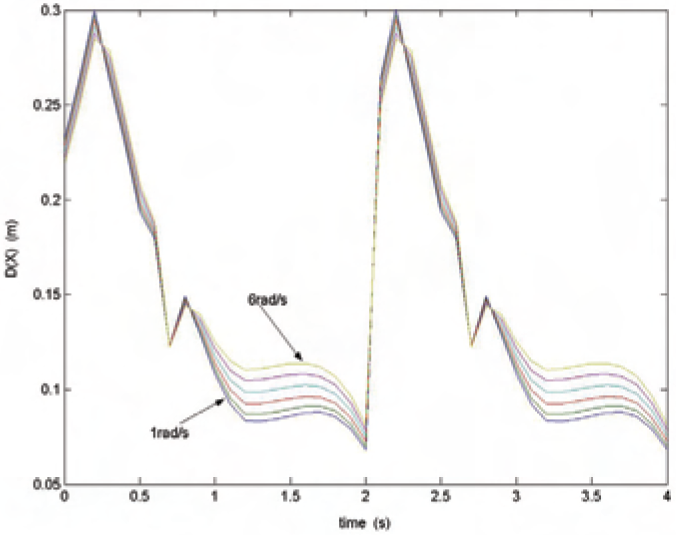
Projection of D(X) with different Θ̇8

Projection of D(X) with different Θ̈8
According to the results, the human motion can be limited to keep the system stable. On the other hand, when the system becomes unstable in unexpected cases, the passenger can swing his body to keep the system safe. The human can compensate the unpredictable instability base on the simulation results to reduce the robot's work. For example, when an external force acts on the robot, the stability criterions of input control, result with human compensation and with system adjust are shown in Fig. 12. Compare with these results it's clear that the right human compensation can reduce the robot's work on redesign the ZMP trajectory and gait. Note that the stability of robot works in lateral plane can be simulated similarly.

Projection of D(X) with adjust and human compensation
5. Conclusion
This paper has presented a preliminary scheme of human-machine shared stability control for a walking-chair robot. ZMP stability criterion is used to define the static safe input sets with human in the loop. The control input is considered as a combination of the human input and the safe control input, which is determined to be the human input when the system state stays in the safe region, and is switched to the safe input when the system state leaves the safe region. The shared control permits human to play an important role in the stability control loop.
The proposed method is simulated using the walking-chair robot JWCR-1 carrying a passenger. According to the results the right human control can compensate the machine control. Smooth transition from human input to snapped control input is achieved to increase the robustness of the stability. Our future study will focus on how to combine the real-time control and stable control with human in the loop.
Footnotes
6. Acknowledgement
We would like to acknowledge that our work is supported by the National Natural Science Foundation of China (NSFC) under grant 60575049 and 60675042.