
Abstract
This paper aims to solve a major drawback of walking robots i.e. their inability to react to environmental disturbances while navigating in natural rough terrains. This problem is reduced here by suggesting the use of a hybrid force-position control based trajectory generation with the impact dynamics into consideration that compensates for the stability variations, thus helping the robot react stably in the face of environmental disturbances. As a consequence, the proposed impact-based hybrid control helps the robot achieve better and stable motion planning than conventional position-based control algorithms. Dynamic simulations and real world outdoor experiments performed on a six legged hexapod robot show a relevant improvement in the robot locomotion.
Keywords
Introduction
Walking robots are in the focus of high interest because of their terrain adaptation capabilities to access unstructured terrains in natural environments. However, complete adaptive locomotion in unstructured terrains requires a relatively complex control framework that also suffers from problems such as foot-planning, gait stability, motion planning and autonomous navigation in the presence of external forces.
In studies related with motion planning of walking robots, researchers have been trying to realize robots that exhibit complex, biologically inspired locomotion. In a few research studies [1]–[2], biologists investigated reflex-based coordination schemes used by walking creatures found in nature to develop gait-like behaviors for terrain adaptation. Another group of researchers, modeled methods like [3] & [4] to plan stepping patterns using sensor fusion. However, these methods have generally been unsuccessful in dealing with external perturbations.
An alternative approach was investigated as presented in [5] to explicitly model gaits with unique stepping patterns through learning techniques [6] for specific tasks. Other research studies in this field [7–8] consider legged locomotion on irregular and steep terrains in which the motion planning is realized through a non-gaited approach to ensure dynamic stability at every posture of the robot while walking. However, the crucial problem that these approaches suffered was the challenging task of achieving accurate transition between different gaits while maintaining stable locomotion in the presence of external disturbances.
Trajectory Generation and Literature Review
Zero moment point (ZMP) based stability criterion [9] is typically used for ensuring stable locomotion in legged robots. Through literature review, it has been well understood that the ZMP control variables are functions of positions and accelerations of the links and the body of a robot, which can be computed online however, implementation of control algorithms for trajectory generation using these expressions is quite difficult in the presence of unexpected external forces. In order to overcome the difficulties associated with the use of ZMP-based trajectory generation methods in control algorithms, approximated models have been proposed in literature [10] rather than the actual detailed models. Furthermore, some studies [11] – [13] have proposed approaches to estimate simple relations between robot Centre of Mass (COM) coordinates and the ZMP to demonstrate stable ZMP-based reference generated trajectories. In some closely related studies [14] – [15], it has been proposed that in order to obtain true biologically inspired locomotion, the ZMP trajectories should move along the robot body during the propel phase of the walking gait.
In [16], a method is proposed for straight line stable walking in bipedal robots using discontinuous ZMP reference trajectory generation with the help of Fourier series approximation. Furthermore, experimental work to demonstrate significance of ZMP-based reference generation techniques is conducted in [17] – [18] which present tuneable walking patterns using single and double support phases in bipedal robots. In recent years, methods like foot rotation indicator (FRI) [19], feasible solution of wrench (FSW) [20], contact wrench sum (CWS) and contact wrench cone (CWC) [21] have been proposed as a substitute to ZMP and the support polygon. However, ZMP is simpler in terms of implementation in control algorithms in comparison to these other indicators. As a consequence, legged locomotion is often controlled and evaluated based on the ZMP criterion.
Motion Planning
In the field of ZMP-based motion planning, many researchers have proposed navigation methods based on trajectory planning for stable locomotion. A few of these research studies include [22] which propose pattern generation by the preview control of the ZMP, [23] that are based on an assumption of a virtual supporting point, [24]–[25] which propose real-time trajectory generation based on analytic solutions and [26–27] deal with the algorithms on optimization gaits for improved dynamical stability and low energy cost. Furthermore, research studies [28] – [32] present real-time gait planning methods using generalized ZMP based pushing motion algorithms implemented on bipedal and humanoid robots to formulate adaptive locomotion for climbing and walking over a slope or an inclined floor using genetic algorithms, sensor fusion and visual information. In some references [33]–[35], virtual-slope-walking algorithms are implemented on biped robots using dynamic simulations to control the stride and walking velocity for levelled grounds only. Though these research studies present excellent approaches to realize stable locomotion using ZMP-based leg trajectory generation however, the problems of ZMP definition in a natural rough terrain is still partially investigated through the work found in literature. In natural rough terrains, prior knowledge of the terrain information is not always available therefore in contrast, this paper aims to improve the robustness of legged locomotion with the help of a method that enables the robot to efficiently react to environmental disturbances.
This paper mainly focuses on the motion planning based on impact dynamics involved in adaptive walking. To accomplish this feat, we propose a control framework constituting a modified (with the impact dynamics into consideration) hybrid force-position controller to deal with the environmental disturbances. As a consequence, the proposed reactive gait improves walking stability in the presence of unexpected perturbations.
The paper is structured as follows: the problem approach is defined in section 2 which describes the dynamics of a six-legged hexapod robot with the help of Langrange dynamics and impact dynamics modelling. Our proposed control system is described in section 3 for trajectory generation. Finally, the proposed controller is functionally evaluated using dynamic simulations and real-world experiments in section 4 to conclude the significance and performance of the proposed motion planning method.
Modelling and Control
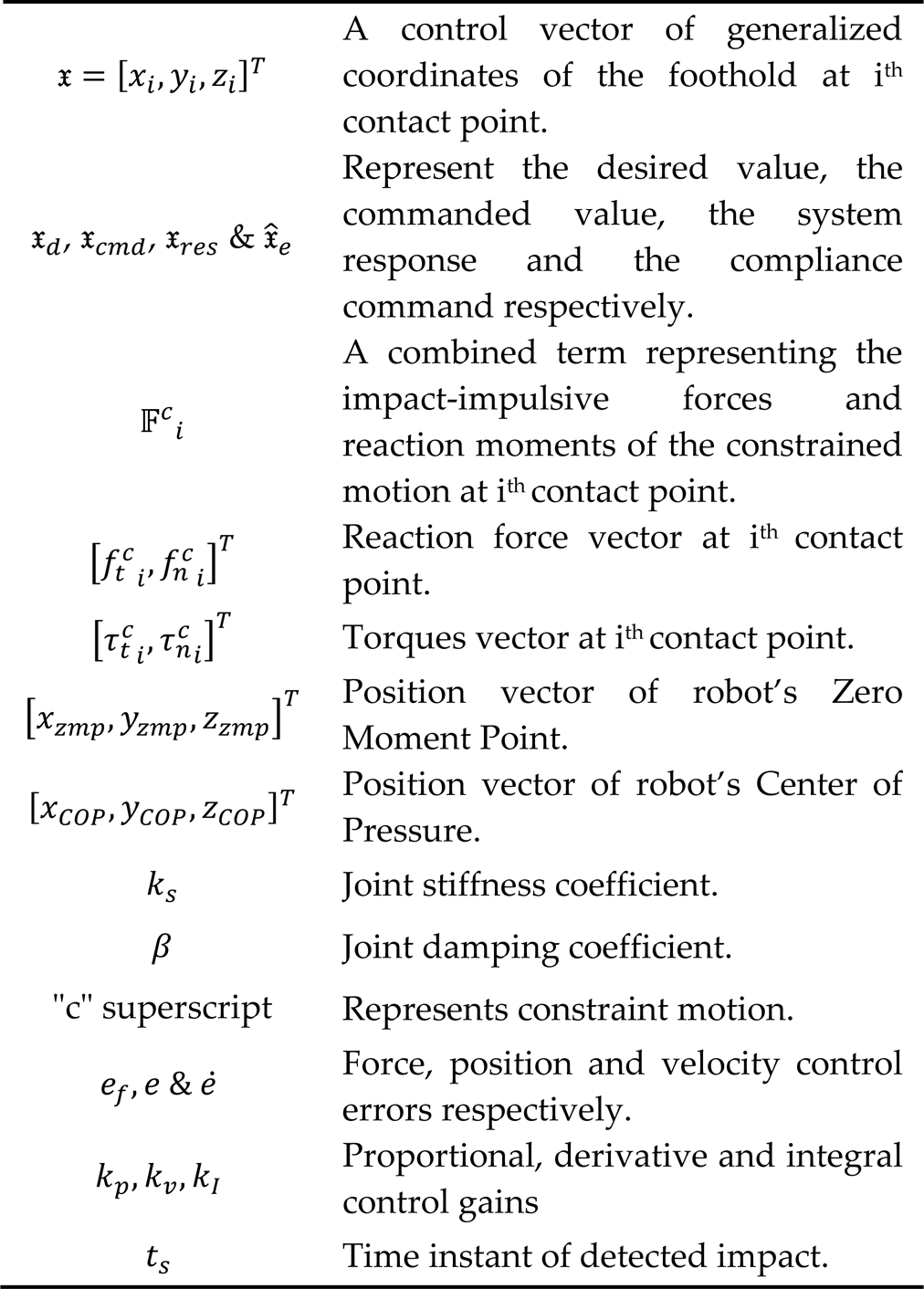
This section outlines the model of the robot and the controller encompassing the motion dynamics of a six-legged hexapod robot with 6-DOF motion capabilities. The prototype robot which we used in this research is a six-legged hexapod robot with a 3-DOF leg design, previously been reported in our earlier works [36, 37], shown in Figure 1. The kinematic model of the robot as described in [36, 37] constitutes forward and inverse kinematic equations to determine the foothold position and pose of the robot body in space. On-board sensors include: a force sensing resistor (FSR), a force-torque sensor (Nano17), and a MEMS-based accelerometer-gyroscope module embedded in each foot. Additionally, an IMU attached at the motion centroid of the robot with an ultrasonic range sensor for posture control and edge detection. Table 1 enlists the parameters of the mathematical model of our robot while, section 2.1 describes the nomenclature used throughout the paper for the ease of understanding of the modelling and control formulations.

Physical model of our six legged hexapod robot.
Physical parameters of the robot.

Control Architecture
In recent years, force control has been intensively studied to design force-based control methods such as operational space method [38], dynamic hybrid position-force control [39], compliant motion control [40, 41], object impedance control [42], motor dynamics-based hybrid control [43] and adaptive force control [44–46]. However, conventional force and position based control methods suffer from kinematic and dynamic stability issues as investigated in [47, 48], friction and stiction problems as identified in [49], asymptotic stability issues in impedance and Cartesian compliance control [50], dynamic problems [51] and the bandwidth limitation investigation [52]. In the light of these research studies, we describe a robust impact-based controller (with modified hybrid force-position control algorithm to compensate the impact dynamics during robot-environment interactions) that switches between the position and force controls based upon phase of the gait for reactive trajectory generation.
The core idea is that, the involved leg is transferred to its planned foothold location during its swing phase with a position control to precisely acquire the desired foothold position. During the impact, the force control is enabled to smoothly make the ground contact with minimum rebound and drift. As the involved leg enters its support phase, the control is switched back to position control in order to maintain its acquired foothold position. Thus, the control switches between pure position control and hybrid force-position control depending upon the phase of the gait. The proposed impact control is described in the following subsection.
Impact Control
Introducing the well known Newton-Euler dynamic model [53, 54] as described in (1)

Where,

Where, the tangential and normal components of the reaction forces and the torque at contact points are represented by (3) & (4) respectively.
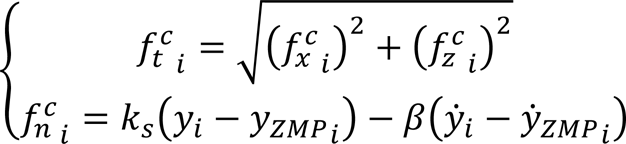

Zero moment point considered in this paper is a 3D-ZMP and is given by (5)

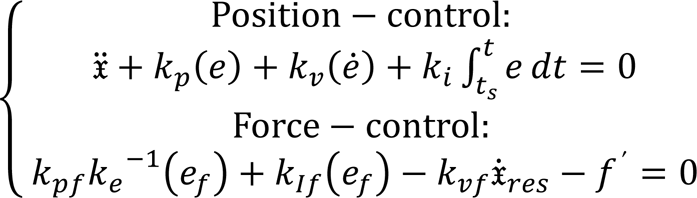
It is crucial for stable walking to smoothly and firmly place foot on the ground with zero velocity. Impact is characterized by impulsive forces arising during the robot-ground interaction for a very small duration t s . Here, the ground and the impacting foot of the robot's leg are modelled as rigid bodies therefore, compliance is only modeled in the normal direction and the contact is assumed to be under the effect of a translational sliding (estimated using foothold's linear acceleration) and rotational drift (approximated using foothold's angular velocity). Thus, the impact angular velocities and linear accelerations are taken into consideration to model differential impulses in the tangential and normal directions through the coulomb friction law [53, 54]. The compliance command to incorporate the effect of environmental dynamics is described in (6)

Using a force controller only can be dangerous after the impact, since it may allow the leg to be dragged back to the ground with a very high speed if the leg leaves the ground contact due to rebound or tripping effect, which may result in instability. In order to ensure that a sufficient contact is maintained with the ground, a position control may be coupled with the force control to drag the leg back to the ground when required. Thus, our controller is designed to switch between a pure position controller for the swing motion and a hybrid force-position controller for the impact (constrained motion). The force control activates as soon as the force-torque sensor detects a force (f e ) that is greater than the minimum detectable force f min of the sensor; meanwhile the position control remain in active state to track the planned leg trajectories to establish contacts with the ground. For an unknown nonlinear environment, the closed-loop force dynamics are considered by describing a force feedback control with positive acceleration as given in (7).


Taking Jacobean on the both sides of (8) yields (9).

Writing (9) in torque-form, we get (10).

Where, 𝔛 = [x y z]
T
is a control vector of generalized coordinates of the foothold, 𝔛
d
is the desired value, 𝔛
cmd
is the commanded value, 𝔛
res
is the system response value and
This control framework as shown in Figure 2 will help to bring the leg in contact with the ground smoothly using the position control if bouncing occurs after the impact to eventually achieve the desired force at the contact point.
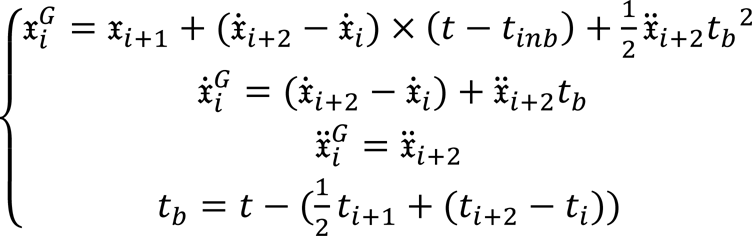
The leg trajectory considered here consists of two segments, one a cubic spline from free space to the ground, the other a cubic spline with parabolic blends from the contact point to a final point on the ground. The swing velocity is considered to follow a trapezoidal velocity profile which imposes a continuous acceleration in the lift phase, a steady velocity in the swing phase and a continuous deceleration in the drop phase.
At runtime, the trajectory generator constructs leg trajectories in terms of
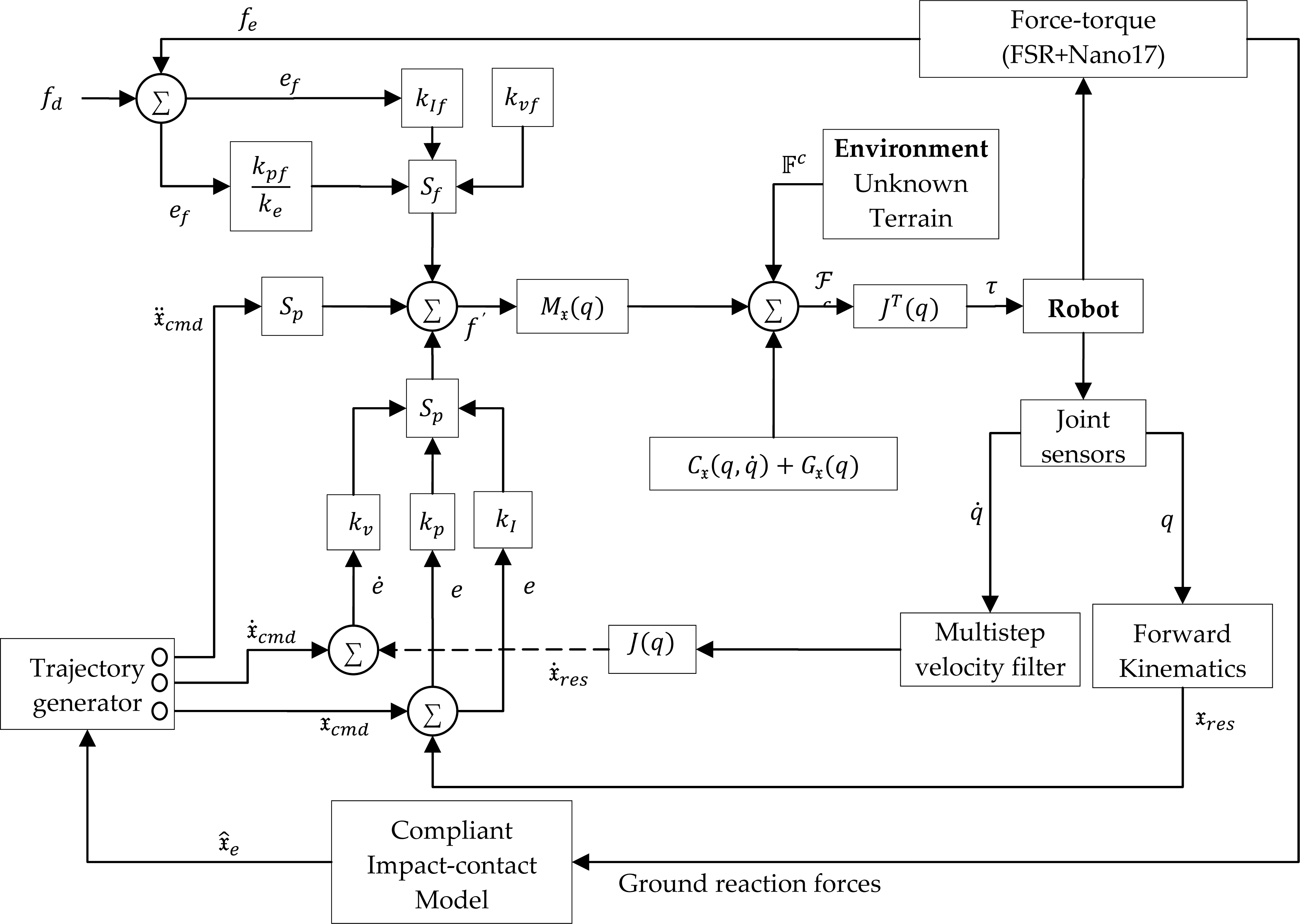
Overall framework of the proposed control system. The control errors are:
In order to evaluate the success of our proposed control algorithm, initial experiments were conducted through dynamic simulations using an open dynamics engine provided by Microsoft robotics developer studio. Simulation tests were designed to focus upon the success of the proposed control algorithm. The robot walks on a terrain generated using height-field maps as shown in Figure 3.
The robot is commanded to perform straight-line walking between two reference waypoints (20 meters apart). Initially, ZMP and stability index [56] are computed online while the robot walks up the hill against the disturbances (arising from ground irregularities) using a sequential gait without considering the impact dynamics. The robot struggled and eventually tumbled down as shown in Figure 4 where the ZMP of the robot escapes out of the support polygon at z = 8 meters.
Next, the simulation test is repeated using the proposed controller which modifies the gait pattern to compensate the disturbances arising during the impact phase. The straight-line walking with minimal tracking errors is achieved using the proposed controller as shown in Figure 5 where the ZMP remains within the support polygon throughout the robot walking, satisfying dynamic stability criterion and the robot was able to walk up till the desired distance (z = 20 meters).

A view of robot following a reference path in a dynamic simulation visual environment.
Further results are shown in Figure 6 in terms of tracking of foothold's position and joint torques. The close matching of position, velocity and acceleration plots validate the position-control capability of our proposed controller to efficiently track the desired positions, velocities and accelerations with consideration of impact dynamics. Similarly, as apparent from the close matching of the joint torques plot, the controller is capable of performing force-control efficiently.
To further evaluate the performance of our proposed control method, we draw a comparative evaluation of the results obtained using a conventional position-based controller for trajectory generation without considering the impact dynamics with the results obtained using our proposed controller. Figure 7 shows the realization of trajectory generation using the proposed SPB method. As apparent from the attitude tracking results shown in Figure 8(A), the conventional controller was incapable of dealing with external forces which is evident from significant fluctuations in the attitude angles of the robot during walking over the rough terrain. In contrast, these fluctuations are minimal when the robot was steered with the impact dynamics into consideration. Similarly, the stability indicator as shown in Figure 8(B), a large value is obtained when using our proposed controller which stays throughout the robot walk concluding a more stable and energy efficient gait. The results reported in Figures 6, 7 & 8 are sufficient to demonstrate the success of our proposed controller in handling disturbances using impact dynamics into consideration with adequate walking stability.

Plot of zero moment point with planned footholds and support polygon without considering the impact dynamics.

Plot of zero moment point with planned footholds and support polygon with the impact dynamics into consideration

Results of dynamic simulations carried out using the proposed controller

Foothold planning and trajectory generation achieved using the proposed controller
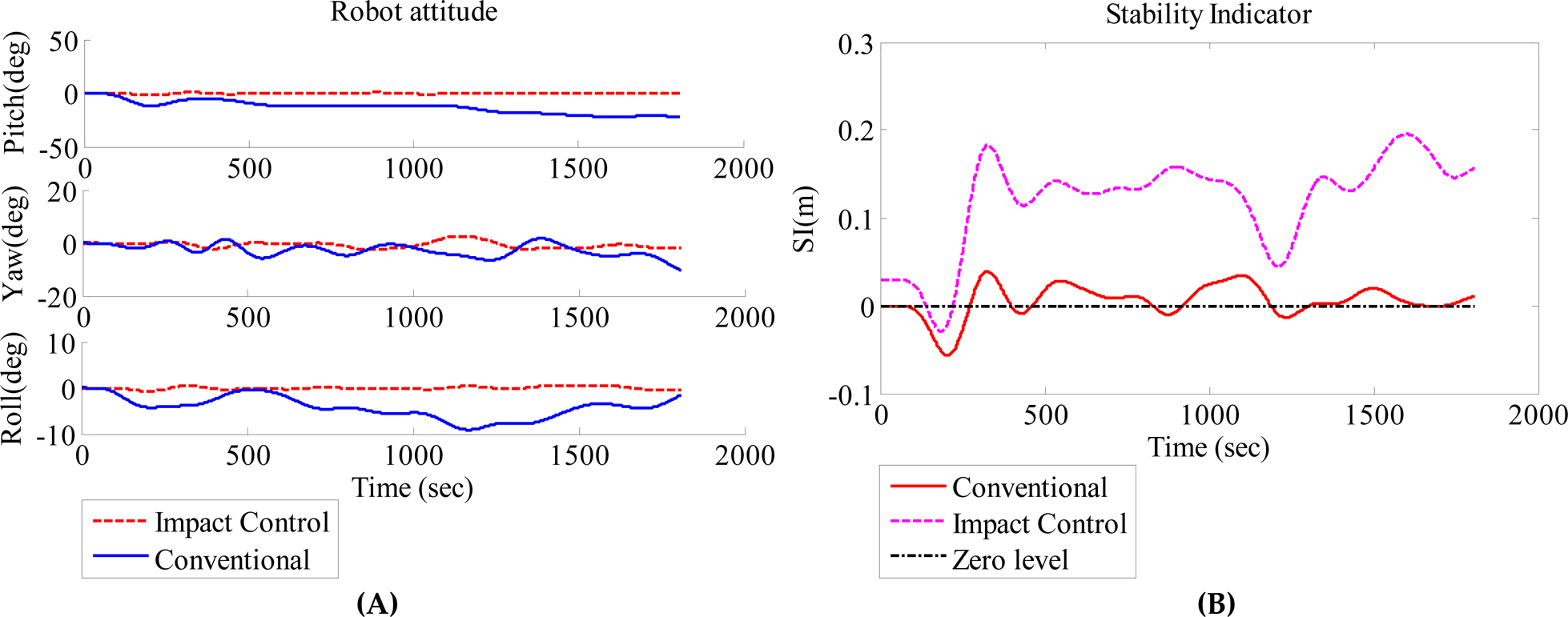
Comparison of attitude control and stability indicator achieved with and without using the proposed controller
Force-torque measurements were taken using a force-torque sensor (ATI Nano 17) embedded in each foot. A high sampling rate (100Hz) was set for the computation to increase the control accuracy and reduce the effect of uncertainties, especially for the force control. In the experiments, the leg was propelled with positions in x, y & z coordinates of a planned foothold and a constrained orientation to perform swing in air. After the detection of the contact with the ground, force was commanded.
Real experiments were conducted on a ground with different surface conditions such as sand, rolling stones, soft mud and hard concrete as shown in Figure 10. The shape, stiffness, and coefficients of ground friction & restitution at the contact surface were uncertain. A total of 15 tests were performed on various surfaces as shown in Figure 10, and the results concluding to the best achievable values comparable to conventional adaptive walking controllers are discussed here. The robot was commanded to travel down an inclination of 45° from a height of 1 meters approximately (pictorially shown in Figure 10(A)), using first a conventional force-position controller (k p = 0.9, k v = 0.8, k f = 0.3), and then using our proposed controller (k p = 0.72, k f = 0.05, k d = 23, k i = 0.7), in order to show how the proposed impact control provides better adaptation to both the environment and disturbances.
If we compare the measured forces of the foot of the leg 1(swing phase shown in Figure 9) in one gait cycle as obtained using a conventional force-position controller and our proposed controller, we observe in Figure 9(A) that the results obtained using a conventional controller show significant fluctuations in the force response during the support and swing phases of the gait cycle. The fluctuations during the support phase are mainly due to the rebounding of leg during impact with the ground at the start of the support while, the fluctuations in the swing phase are due to the sensor noise (that comes from the piezoelectric nature of the force sensors) when the leg is transferred in air with a rapid speed. In contrast, the proposed herein controller makes the foot contact with the ground smoothly that is apparent from the steady force response (without fluctuations) during the support and swing phases. This can also be observed in Figure 9(B), where foot y-positions are shown to represent a steady and smooth contact with the ground without much fluctuation when using the proposed controller.
Furthermore, when the conventional controller was used, the stability indicator decreases during the impact in the support phase and then it remains at a low level in the swing phase as apparent in the Figure 9(C). However, when the proposed controller is used, the leg recovers from the impact disturbances, and the stability margin increases after a transient response during the impact in the support phase eventually stabilizing at a level higher than its initial state for the rest of the swing phase as shown in Figure 9(C). This validates the ability of our proposed controller to compensate for the stability losses due to foot-speed changes during the rebound.
As apparent from this comparative analysis, it is evident that the experimental results clearly demonstrate the significance of considering the impact dynamics in a hybrid force-position control scheme. The results reported in Figure 9 represent improvement in gait stability related to the improvement in walking performance.
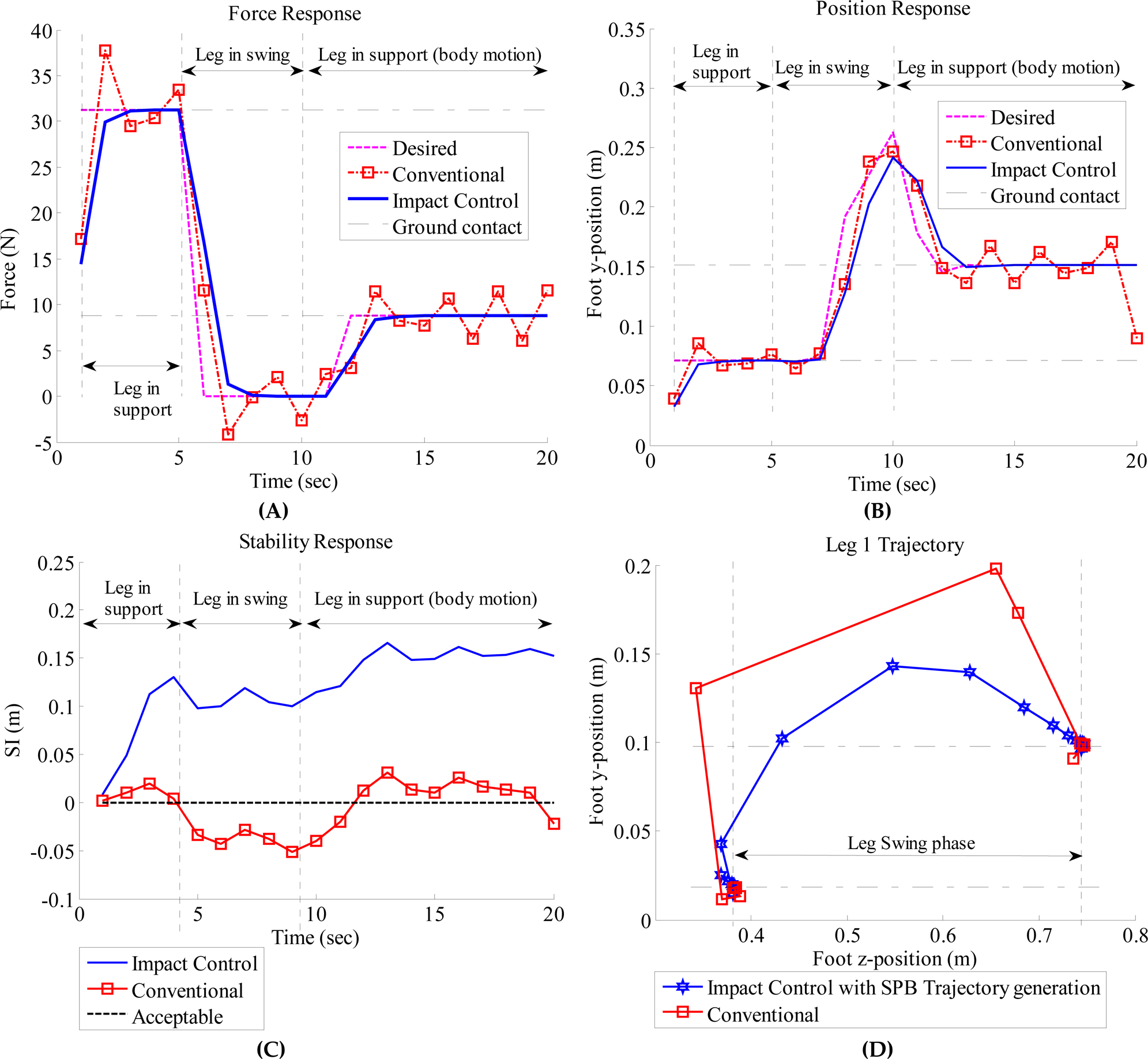
Experimental results obtained from outdoor experiments on a six legged hexapod robot.

Pictorial demonstration of robot performing walking routines in unstructured and rough terrains. (A) shows walking experiments performed on a ground with a 45° elevation composed of soft mud to mainly test the attitude control, (B) shows walking over a ground with dry sand and small rolling stones, (C) shows navigation in an unstructured environment (ground with concrete bricks and obstacles).
A modified hybrid force-position controller has been proposed that incorporates the impact dynamics of the robot with the environment which has improved the position control performance, in particular in the case of tracking the desired leg trajectories and efficient force control to compensate the environment disturbances significant during the robot-ground interactions. The underlying gait adaptation methodology adopted in this paper is inspired from the natural gait adaptation carried out by legged creatures found in nature to balance the external forces by generating reactive walking patterns with disturbance compensations. The proposed controller takes the impact dynamics into consideration to counteract impulsive disturbances during leg-transfer phases which generally reduce the gait stability, increasing the probability of tumbling down as a consequence.
Initial experiments were designed to focus upon the adaptation to external or environmental disturbances using a six legged hexapod robot. By comparing the stability margins of the two experiments as shown in Figure 9(C), we can infer that when using a conventional position-based trajectory generation, the stability index increases with time during the support phase but drops drastically during the swing phase mainly due to the combined phenomenon of destabilizing effects of leg transfer and force disturbance. In contrast, when using the proposed controller, the stability index drops during the swing phase but remains higher throughout the robot walking that concludes that the emerging gait is more stable with increased robustness to external disturbances. As apparent in Figure 9(C), even the conventional controller keeps enough stability index however, if during this period of leg transference a disturbance is generated or the robot speed increases (that may increase the leg accelerations and leg inertia), this controller is more likely to allow the robot to tumble down actually during this period of time. Therefore, the improvement in the gait stability as identified by the stability index is a measurement of the robustness to unexpected dynamic disturbances.
The conventional position-controlled gait is stable at low speed due to the slow transient response of the controller however at higher speeds (for an average gait speed of about 3cm/sec) the rigidity of the conventional position-controlled gait generates large oscillations that make the gait unstable. In contrast, the gait stability index when using the proposed controller is much larger for the same speed that concludes a more stable and more capable gait to handle unexpected disturbances. As the speed increases, this method also suffers from low dynamic stability but, the results remain at values comparable with the best stability values of other conventional position-controlled methods.
Realizing that walking robots are superior to wheeled robots because of their terrain adaptation capabilities but on the other hand, they suffer from low speed and poor stability in difficult terrains, the results reported here show that the proposed hybrid force-position control with impact dynamics into consideration is a relevant improvement in the control of walking robots and their adaptation to natural environments.