
Abstract
Fitting a wireless capsule endoscope (WCE) with a navigation feature can maximize its functional benefits. The rotation of a spiral-type capsule can be converted to translational motion. The study investigated how the spiral structure and rotational speed affected the capsule's translation speed. A hand-held instrument, including two permanent magnets, a stepper motor, a controller and a power supplier, were designed to generate rotational magnetic fields. The surfaces of custom-built permanent magnet rings magnetized radially were mounted in spiral lines with different lead angles and diameters, acting as mock-up capsules. The experimental results demonstrate that the rotational speed of the magnetic field and the spiral have significant effects on the translational speed of a capsule. The spiral line with a larger lead angle and the rotating magnetic field with a higher speed can change the capsule's rotation into a translational motion more efficiently in the intestine.
1. Introduction
WCE has become a routine inspection tool in clinical checks since it (PillCam, Given Imaging Ltd., Israel) was approved by the U.S. FDA in 2001 [1–2]. Compared with conventional probe endoscopy, WCE shows great potential advantages. For example, WCE is much more comfortable for patients due to non-invasive exploration of the gastrointestinal (GI) tract. It is safer to perform in diagnosis [1–4]. However, in the rest of the GI tract, such as the stomach, oesophagus and colon, the probe endoscopes retain their advantages [5–6]. The main limitations of the current WCE include potential retention, the possibility of missing a suspicious region and the inability to visualize the circumference of the intestine. These limitations are related to another disadvantage: that is, its passive and random motion manner, as it is driven by natural peristalsis of the GI tract and gravity [7–8].
Many scholars have explored possible solutions for manoeuvring microrobots in the GI tract. For example, in the early period, Phee et al. proposed a robot imitating inchworm locomotion [13], and Quirini et al. and Gábor et al. separately presented legged and swimming microrobots [9–10]. Recently, some scholars presented investigation systems generating external driving magnetic fields using a permanent magnet or electromagnet. Kósa et al. propelled an endoscopic capsule by means of the strong magnetic field of MRI [11]. Carpi et al. reported that the capsule was magnetically steered via a robotic magnetic navigation system (Niobe, Stereotaxis, Inc, USA) in the GI tract of a pig [12]. Keller and Swain et al. reported magnetical guidance of a WCE in the human oesophagus and stomach [13,14]; similarly, Ciuti et al. reported a method for the magnetic steering and locomotion of a WCE [15]. Arthur et al. presented the 5-DOF manipulation of a magnetic capsule in fluid using a single permanent magnet [16,17].
Magnetic guidance for WCE is a growing research area. As weaker resistance forces act on WCE, dragging a magnetic WCE in the organ with bigger cavities has its advantages. However, it is difficult to control magnetic field strength; thus, WCE sometimes turns over in the bigger organ cavities. The small and large intestines have small cavities and some winding parts, making driving a WCE forwards by rotation a useful method. Arthur et al. proposed generating rotating magnetic fields with a single permanent magnet for the propulsion of untethered magnetic devices; however, constraining the actuator magnet to special positions may preclude the use of rotating-permanent-magnet actuation in the experiment due to the presence of obstacles [18,19]. Lien et al. presented a cheap solution for generating rotational magnetic fields by rotating a permanent magnet, which is referenced in our experiments [20]. If the surface of the capsule is mounted spirally, the rotation of the capsule will be transformed to a translational movement [21–22]. The moving speed of a capsule in the intestine will improve.
In this study, a hand-held magnetic driving instrument (MDI), recommended by Lien et al. [20], was developed for driving the capsule in the small and large intestines of a pig by generating rotational magnetic fields. Ten dummy capsules, similar to commercialized WCEs on the market in dimension (pillcamSB2:11mm×26mm) and mounted using a different spiral structure, were fabricated for investigating how spiral structures affect translational speed. Several segments of the small and large intestines of a pig were used for an ex vivo experiment. The data can be utilized as references in developing the actual WCE in the future.
2. Experimental Set-up
Experiments included two important equipment parts: the dummy capsule and the instrument generating the rotational magnetic field. The two parts were handmade. The following sections introduce the two equipment parts.
2.1. Dummy capsules
Nine capsules with spiral structures were fabricated. A custom-built cylindrical permanent magnet ring magnetized as S and N poles (fig.1 (a)) was used as a shell. A hot-melt glue bar (main ingredient: Ethylene-vinylacetate copolymer), heated to 70oC in the melting glue gun, flowed into the ends of the magnet ring to shape the dome manually. In addition, the dome prevents the intestinal mucus from flowing into the ring. The detailed parameters of the magnet ring are listed in Table 1. The maximum magnetic flux intensities of the poles were measured using a Tesla meter (HT20, Shanghai Hengtong Cidian Technology Ltd., China).

Poles of the magnet ring and dummy capsules
Copper wires covered with an ethylene-vinylacetate copolymer were glued onto the surface of the magnet rings, acting as spiral structures. The spiral part was only within the cylindrical magnet's surface, not stretching to the dome parts, as shown in Fig.1(b). To investigate how the spiral structure influences the capsule's translational motion, the spiral lines were arranged in different diameters and lead angles. The final parameters of the capsules are shown in Table 2.
Parameters of the magnet ring

Parameters of the dummy capsules

2.2. Magnetic driving instrument
In the experiments, the rotational speed of the magnetic fields was expected to be adjustable, and convenient steering of the MDI was desired. Based on the requirements, we adopted a rotating permanent magnet using a stepper motor to generate magnetic fields. The MDI included a stepper motor, a motor driver, a controller, a power supplier and two-bar permanent magnets, the dimensions of which are L5cm×W0.8cm×H0.6cm. The maximum magnetic flux intensity on the surface was about 595 mT. The stepper motor rotated precisely at a resolution angle of 1.8o. One end of the aluminium shaft connected with the axis of the stepper motor through the connector, the other end of the shaft fixed two bar magnets with opposite poles close together. The speed of the stepper motor was adjustable by changing the parameters of the programme. Additionally, when a reflecting strip was glued to the connector, the rotational speed of the stepper motor was also non-contactly measured using an infrared tachometer (DT-2234B, Lutron Electronic Enterprise Ltd., Taiwan). The general view of the MDI is shown in Fig. 2.

General view of the MDI
3. Experimental Measurements and Results
A 50cm-long segment of a plastic tube with the diameter of 5 cm was split in half, and one half was used to hold the intestines. Before experiments, the intestine with no debris was cut open axially; then it was put in the tube. To guarantee the freshness of the intestines, the small and large intestines of a pig were bought every morning from a slaughterhouse. The daily experiments were completed within two hours.
As there was no reference about the rotational speeds of the stepper motor for the experiments, we chose speeds from 9 rpm (revolutions per minute) to 216 rpm. Similarly, as there was no reference about the length of the intestines, through several tentative tests, we selected 40cm-lengths of intestines for the measurements of translational speeds.
As the length of the bar magnet was 5 cm, the scope of the rotational magnetic fields was about 5 cm. The capsule would move 40 cm along the intestines, so the MDI should move according to the capsule's position. The MDI was located under the plastic tube, and its pedestal could be moved by hand using the operational panel. During each measurement, one operator kept the bar magnet under the capsule when it was moving forwards rotationally. The other operator recorded the time via stopwatch. Each measurement was repeated five times. To improve accuracy, two operators were trained three times before performing the formal experiments. All experiments were carried out in an ordinary lab at room temperature of 25oC for three days. The minimum and maximum distances between the surfaces of the bar magnets and capsule, and the magnetic flux intensities on the surface of the capsule induced by bar magnets, are shown in Table 3.
Distance and magnetic flux intensity

3.1. Translational speeds in porcine large intestines
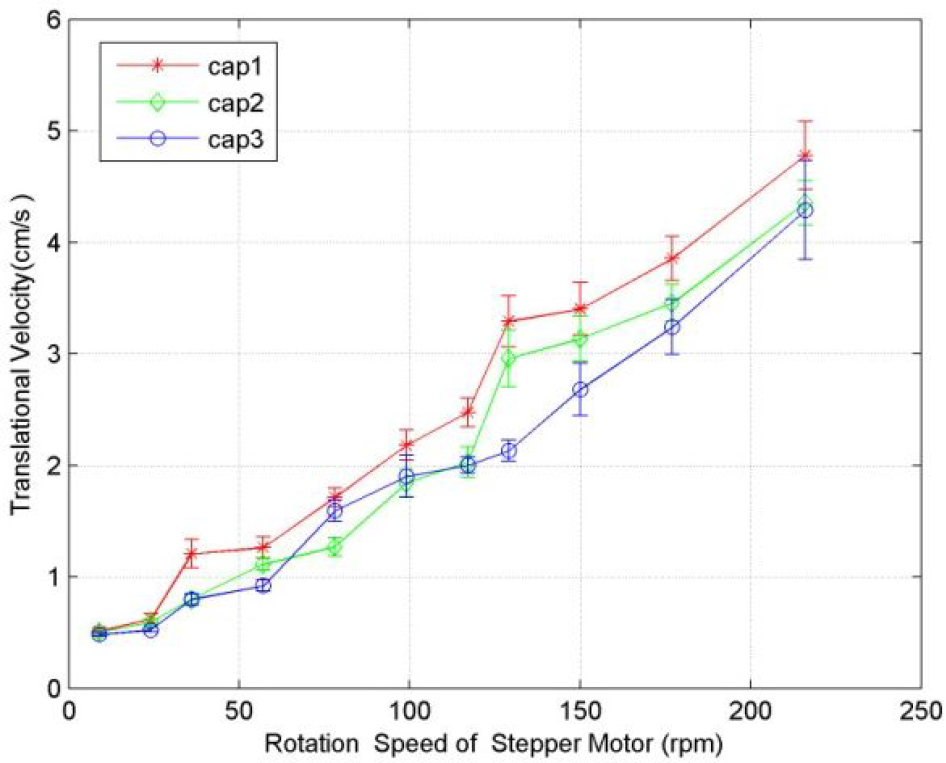
Fig. 3, Fig. 4 and Fig. 5 show the translational speeds of capsules in porcine large intestines. It is noticeable that the translational speeds of capsules increase with growth of the rotational speed of the stepper motor. From Fig. 3, it is uncertain whether cap1, cap2 or cap3 is best according to translational velocity. According to Fig. 4, cap4 is better than both cap5 and cap6. Similarly, Fig. 5 shows that cap7 is better than cap8 and cap9. Cap4 has the highest translational speed in all the dummy capsules. From Fig. 4 and Fig. 5, it can be found that the capsules mounted along a spiral line with the largest lead angle have higher translational speeds. The translational speed rises slightly when the diameter of the spiral line increases from 0.5 mm to 1mm, and then it goes down when the diameter of the spiral line increases from 1 mm to 2 mm. Cap4, with the largest lead angle and a 1mm diameter spiral line, has the best performance in the porcine large intestines from the point of view of translational speed.

Translational speeds of cap1, cap2 and cap3 in porcine large intestines, and the error bar represents the standard deviation computed by five samples

Translational speeds of cap4, cap5 and cap6 in porcine large intestines, and the error bar represents the standard deviation computed by five samples
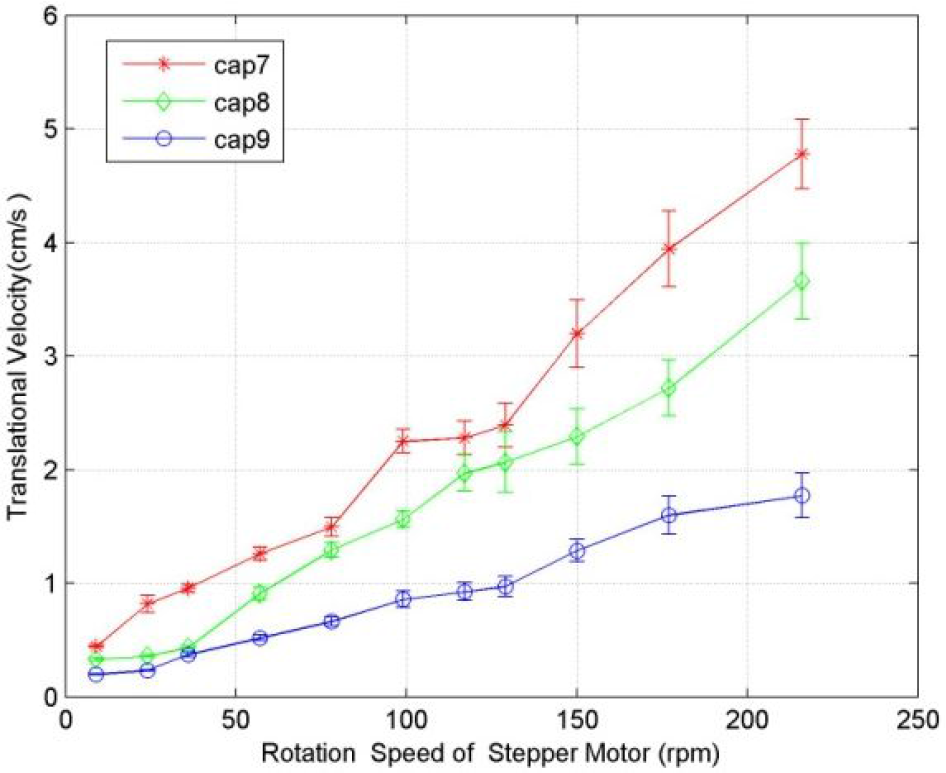
Translational speeds of cap7, cap8 and cap9 in porcine large intestines, and the error bar represents the standard deviation computed by five samples
3.2. Translational speeds in porcine small intestines
The measurement approach for porcine small intestines is similar to that described in Section 3.1. From Fig. 6, Fig. 7 and Fig. 8, it is apparent that the translational speeds rise with an increase in the rotational speed of the stepper motor, and that the translational velocity of the capsule mounted along spiral lines with a maximum lead angle is best. The translational speed in porcine small intestines rises slowly when the diameter of the spiral line increases from 0.5 mm to 1 mm, and it decreases when the diameter of the spiral line increases from 1 mm to 2 mm. Similarly, cap4 has the best translational motion performance in porcine large intestines.
Translational speeds of cap1, cap2 and cap3 in porcine small intestines, and the error bar represents the standard deviation computed by five samples

Translational speeds of cap4, cap5 and cap6 in porcine small intestines, and the error bar represents the standard deviation computed by five samples

Translational speeds of cap7, cap8 and cap9 in porcine small intestines, and the error bar represents the standard deviation computed by five samples
3.3. Translational speed of a capsule with no spiral line
To investigate the performance of a capsule with no spiral line, the translational speeds of cap10 in both small and large intestines were measured. As shown in Fig. 9, its translational speed is apparently lower than that of other capsules, which shows that the spiral can effectively improve the translational speed. A qualitative interpretation is presented here. As folds exist on the inner walls of the intestines, the capsule with no spiral sinks into the folds and costs some time as it has to climb out. The spiral with a small diameter extends the capsule's ability to overcome the resistance of folds through increasing friction. However, as the spiral's diameter increases, the increment of resistance exceeds the ability of the spiral to overcome the resistance.

Translational speeds of cap10 in porcine large and small intestines, and the error bar represents the standard deviation computed by five samples
4. Data Analysis
The aforementioned experimental results demonstrate that the rotational speed of the stepper motor (that is, the rotational speed of the magnetic field), the diameter and lead angle of the spiral are factors affecting the translational speed of the capsule. In addition to these factors, the following conditions are assumed to be satisfied.
The capsule is not blocked by a collapsed intestine wall.
The total diameter of the capsule and spiral is less than the inner diameter of the intestines.
The resistances of the peristalses are precluded.
To determine the rotational speed of the magnetic field, and whether the diameter and lead angle of a spiral line have significant influence, a three-variable linear regression mode is exploited to analyse it. The linear regression mode is expressed as (1), while x1, x2, x3 and v denote the rotational speed, lead angle, diameter and translational speed, respectively.

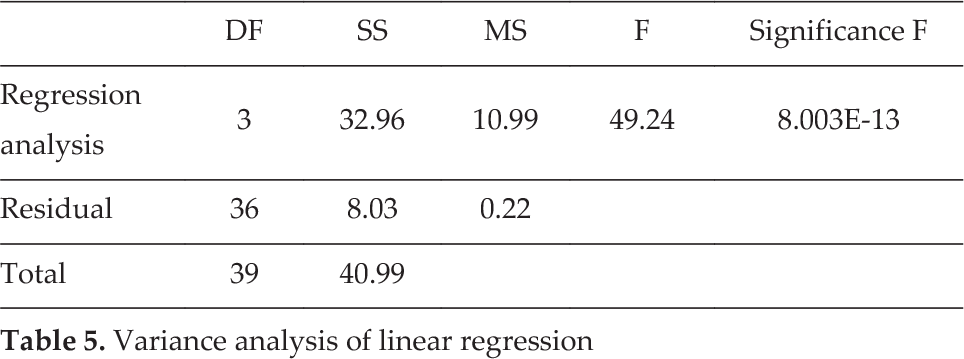
Five typical rotational speeds of the stepper motor, three lead angles and three diameters of spiral lines, and the corresponding translational speeds of capsules in porcine large intestines, are listed in Table 4. After inputting these data into the software Excel (Microsoft Inc., U.S.), the variance analysis of linear regression is listed in Table 5. The significance F is 8.003E-13 (<<0.01), which demonstrates that the rotational speed of the magnetic field, the lead angle and the diameter of the spiral have joint significant influences on the translational speed of capsules. The P-values of b0, b1 and b2 are less than 0.001 (as shown in Table 6), so we can state that the rotational speed of the magnetic field, the lead angle and the diameter of the spiral have significant influences on the translational speed. The value of b3 is negative, which shows that the translation speed decreases as the diameter increases, and it accords with the measurements. By using the same three-variable linear regression mode and the measurements of capsules in porcine small intestines, the same analysis results are obtained (see the appendix).
Translational speeds in porcine large intestines and impact factors

Variance analysis of linear regression
Regression parameters

5. Conclusions
Nine capsules with different spirals and one capsule with no spiral were fabricated to investigate motion in both porcine large intestines and porcine small intestines. With the magnetic coupling of the magnet ring and rotational magnetic field, the capsule moved forwards rotationally. Experimental results demonstrate that the rotational speed of the magnetic field, the lead angle and diameter of the spiral have significant joint influences on the translational speed of the capsule, and also have separate effects on the capsule's translational speed in the intestines. The results show that a larger rotational speed of the magnetic field and the lead angle of the spiral improve the translational speed of the capsule, while a larger diameter of the spiral reduces the translational speed of the capsule. The study cannot tell whether the rotational speeds of the magnetic field, the lead angle or the spiral's diameter have greater abilities to enhance the capsule's translational speed.
The domes of the capsules were variable because they were shaped manually. If the contact area between the dome's surface and the intestinal wall is large, then the results of this study are likely to have been affected. However, in the experiment, only the dome's edge touches the intestinal wall. Therefore, the non-consistently shaped domes had only a small influence on the results.
In the experiment, magnetic flux intensities induced by the bar magnet on the surface of the magnet ring ranged from 5 mT to 9 mT, which was enough to propel the capsule. The magnetic field induced by the permanent magnet decreased rapidly, so the distance between the capsule and rotational magnet was maintained at 3.5 cm in the experiments, while the thickness of most people's abdomen walls are larger than 3.5 cm; therefore, future work will focus on the elongation of this distance. Moreover, the rotating capsule may injure the organ, so ensuring a secure rotational speed of the capsule should be further investigated in the future. After necessary technical verifications and clinical experiments, the active locomotion mode of capsule endoscopes can be beneficial to patients who need digestive tract examinations.
Footnotes
6. Acknowledgements
This project was supported by the National Natural Science Foundation of China (Grant No. 61202196, 61501428), the Scientific Research Fund of Sichuan Provincial Education Department (Grant No.12ZA200) and the Yibin Scientific and Technological Project (Grant No.2013ZSF010), and was also supported by the Doctoral Fund of Yibin University (Grant No. 2011B06).
Appendix
Regression parameters

| Coefficient | t-value | P-value | |
|---|---|---|---|
| b0 | 0.243 | 1.561 | 0.127 |
| b1 | 0.019 | 22.117 | 1.526E-22 |
| b2 | 0.033 | 5.08 | 1.176E-05 |
| b3 | -0.248 | -3.472 | 0.0013 |