
Abstract
Based on screw theory and the principle of one- leg driving by an independent motor, a methodology for the structural synthesis of fully-decoupled three-rotational and one-translational (3R1T) parallel mechanisms is proposed by analysing the characteristics of the input-output relationships for fully-decoupled parallel mechanisms. Firstly, the desired forms for both the direct and the inverse Jacobian matrices of fully-decoupled parallel mechanisms are constructed by virtue of screw theory; this is in order to satisfy the demand that these two Jacobian matrices should be non-zero diagonal matrices. Secondly, the effective screw, the actuated screw and the mobile un-actuated screws of each limb are established via reciprocal screw theory, while all the possible topology structures fulfilling the requirements are obtained, based on different connectivities for each limb. Finally, the desired fully-decoupled parallel mechanisms can be synthesized using the structural synthesis rule, while the structural synthesis of fully-decoupled 3R1T parallel mechanisms can be obtained by exploiting the above-mentioned methodology. Moreover, the Jacobian matrix of a synthesized 3R1T parallel mechanism is deduced to demonstrate the decoupling feature of the parallel mechanism, which also validates the correctness of the methodology for the type synthesis of fully-decoupled 3R1T parallel mechanisms. The contents of this paper provide a reference and possess significant theoretical meanings for the synthesis and development of the 3R1T fully-decoupled parallel mechanisms. Motors are mounted one per leg, with each one of them actuating a one Degree-of-freedom (DoF) of the fully-decoupled parallel mechanism through a one-to-one velocity relationship.
1. Introduction
For more than two decades, parallel manipulator systems have become one of the research interests in robotics. This popularity has been motivated by the fact that parallel manipulators possess some specific advantages in accuracy, rigidity, stiffness and load-carrying capacity, better dynamic performance etc. over serial manipulators[1–2]. Among them, the best-known parallel manipulator is the Delta mechanism [3], which is widely used in practice. Meanwhile, there has been a remarkable advance in relation to the type synthesis of parallel mechanisms, with contributions from many scholars whose work is generally based on group theory[4], screw theory[5], the single-opened-chain synthesis method[6] etc.
In the field of parallel mechanisms, the use of lower- mobility parallel mechanisms requiring fewer than six DoFs for many tasks has drawn a lot of interest, owing to the fact that it leads to fewer links and actuators. Developers stand a good chance of reducing the costs of design and manufacturing. Strong coupling is a prominent feature of parallel mechanisms, which makes parallel mechanisms possess some special advantages over serial mechanisms. However, it is the strong coupling that brings about many difficulties, such as non-linear relationships between input and output, complex workspace, kinematics analysis, trajectory planning and precision control, which also restricts its application. Therefore, the type synthesis of fully-decoupled lower-mobility parallel mechanisms has become a new topic in this area and has captured researchers' attention[7–18]. However, as the authors are aware that most of the work reported above has dealt with the type synthesis of fully-decoupled parallel mechanisms with three-rotational DoFs or three-translational DoFs, respectively, much less work has been reported on the topic of the type synthesis of fully-decoupled 3R1T parallel mechanisms, which is the main contribution of the present paper.
The organization of the present paper is as follows. An overview of the research on parallel mechanisms and the type synthesis of fully-decoupled parallel mechanisms is briefly introduced in Section 1. Section 2 mainly describes the basic concepts of screw theory, the reciprocal screw, the effective screw and the constraint screw. According to the expected kinematic characteristics of the fully-decoupled 3R1T parallel mechanisms, a method is proposed to synthesize the desired forms for both the direct and the inverse Jacobian matrices. Based on the analyses of the direct and the inverse Jacobian matrices, a methodology for the structural synthesis of fully-decoupled 3R1T parallel mechanisms is proposed in Section 3. Based on reciprocal screw theory, the actuated screws and the mobile un-actuated screws of each leg of the fully- decoupled 3R1T parallel mechanism are established, while all the possible topology structures fulfilling the requirements are presented in Section 4. In Section 5, the type synthesis of fully-decoupled 3R1T parallel mechanisms is performed and the Jacobian matrix of a synthesized 3R1T parallel mechanism is deduced, which demonstrates the decoupling feature of the parallel mechanism and validates the correctness of the methodology for the type synthesis of fully-decoupled 3R1T parallel mechanisms. Finally, the main conclusions and possible future works are discussed in Section 6.
2. Basic Concepts of Screw Theory
2.1. Basic concept of screw theory
[19] shows that a unit screw $ can be defined by a pair of vectors $=(

where
2.2. The reciprocal screw
If the two screws $1=(

then they are said to be reciprocal, where a symbol “°” represents a reciprocal product of the two screws, while notation (
2.3. The effective screw
The effective screw expresses a force or a coaxial couple acting on the rigid body by the driver. When $
i
=(
2.4. The constraint screw
When the screw $ is used to describe the prescribed motion of the moving platform of parallel mechanisms, the constraint screw system can be obtained by calculating its reciprocal screw; the constraint screw system represents the restricted DoF of the moving platform of parallel mechanisms. For detailed descriptions of the geometry condition of the constraint screw system and the restricted DoF, please refer to [19].
3. Instantaneous Kinematics Analysis of Fully-decoupled Parallel Mechanisms
This paper will only discuss the type synthesis of fully- decoupled 3R1T parallel mechanisms. Without loss of generality, it can be assumed that the fully-decoupled 3R1T parallel mechanism moves along the Z-axis and rotates around the X-, Y- and Z-axes. Then, the instantaneous kinematics of the parallel mechanism can be determined using reciprocal screw theory. If

where F i is the connectivity of the ith leg. If $ai is the effective screw of the ith leg, it is a screw that is reciprocal to all the twists of the leg, with the exception of the actuated one. By taking the reciprocal product of both sides of Eq. (3) with $ai, this yields:

When the first joint (base-mounted) is assumed to be the actuated one, Eq. (4) can be written in a matrix form, as follows:

Provided that the leg constraint screw system restricts the translational DoF of the moving platform along the X- and Y-axes, the X and Y components of



where
If

where

The
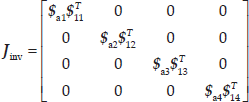
In order to synthesize fully-decoupled 3R1T parallel mechanisms, the Jacobian matrix
If the direct Jacobian matrix is a non-zero diagonal matrix, then the mechanism must be fully-decoupled. Based on this conclusion, a method will be proposed by virtue of screw theory to synthesize desired forms for both the direct and the inverse Jacobian matrices.
It should be noted that the Jacobian matrix is related to the effective screw and the actuated screw on the corresponding leg, while the desired form of the effective screw and the actuated screw should be determined firstly to construct a non-zero diagonal matrix for the type synthesis of fully-decoupled parallel mechanisms. Due to the fact that the actuated screw varies with the configuration of the moving platform, all motors are required to be mounted on the base platform to ensure that the actuated screw will not vary with the configuration of the moving platform of parallel mechanisms.
Zeng et al.[21] pointed out that, for fully-decoupled parallel mechanisms, when the effective screw is a force, the actuated joint can be a prismatic pair or a parallel 2R revolute pair; meanwhile, when the effective screw stands for a coaxial couple, the actuated joint should be a revolute pair. Based on this conclusion, the type synthesis of fully-decoupled 3R1T parallel mechanisms can be accomplished by the driven-chain principle, such that the main idea can be described by the following:
Based on the driven-chain principle, the output of each leg of the 3R1T parallel mechanism should be determined and the effective screw of the driver in each leg can be constructed to satisfy the requirements that both the direct and the inverse Jacobian matrices are non-zero diagonal matrices.
Based on the analysis of the effective screw of each leg, the actuated joint can be determined by means of the conclusion proposed by Zeng et al.[21]; this states that, when the effective screw is a force, the actuated joint can be a prismatic pair or a parallel 2R revolute pair, whereas, when the effective screw stands for a coaxial couple, the actuated joint should be a revolute pair.
According to reciprocal screw theory, the twist of each leg of the fully-decoupled 3R1T parallel mechanism, with the exception of the actuated joint, can be deduced. The effective screws, the actuated screws and the mobile un-actuated screws of each leg are established and all the possible structures of each leg of the parallel mechanism can be synthesized according to the different connectivity of each leg. Repeat steps (a-c) until that structures of each leg of 3R1T parallel mechanism have been constructed successfully.
Based on the structural synthesis rule and the rotational conditions for fully-decoupled parallel mechanisms, as proposed in [15], four legs can be selected from step (c) and connected to the moving platform and base platform; in turn, the type synthesis of fully-decoupled 3R1T parallel mechanisms can be realized.
Please note that: 1) as both the direct and the inverse Jacobian matrices are non-zero diagonal matrices, the Jacobian matrix is a non-zero diagonal matrix, which indicates that the parallel mechanism to be synthesized within this paper is fully decoupled; 2) moreover, a one-to-one correspondence exists between the actuated joint space and the output space of the moving platform, since each DoF of the moving platform is driven by one motor for each leg. A flow chart for the type synthesis of fully-decoupled parallel mechanisms is shown in Figure 1.

A flow chart for the type synthesis of fully-decoupled 3R1T parallel mechanisms
4. Architecture Design for Four Legs of Fully-decoupled 3R1T Parallel Mechanisms
Without losing any generality, it can be assumed that the 3R1T parallel mechanism to be synthesized moves along the Z-axis and rotates around the X-, Y- and Z-axes. In the following section, it assumes that the first leg provides actuation to the platform translation along the Z-axis, while the second, third and fourth legs provide the actuation rotation around the X-, Y- and Z-axes, respectively. As the kinematic characteristics of a parallel mechanisms are concerned with the intersection set of the kinematic characteristics of each leg, which constitute a parallel mechanism, each leg should at least include the kinematic characteristics of the moving platform, while the connectivity of each leg should be at least four. In order to synthesize the fully-decoupled 3R1T parallel mechanism, four legs should firstly be constructed; this will be explained in the following section.
4.1. The first leg
The first leg provides direct actuation to the platform translation along the Z-axis. Since [

That is to say, it must be a screw of zero pitch that is parallel with the X-direction. In this case, according to the analysis described in Section 3, there are three types of actuated screw.
Substituting Eq. (13) into Eq. (9) will result in the following:

where [
A screw system with finite pitch whose direction is parallel to the Z-axis, while the dimension of such a screw system is a maximum of three and a minimum of one.
A screw system with infinite pitch lying in arbitrary planes perpendicular to the Z-axis, in which the dimension of the screw system is a maximum of two, and the directions in the legs are not parallel with each other.
A screw system with zero pitch intersecting with $a1. Its dimension is at least two, while the direction is parallel to the Y-axis and the Z-axis direction, respectively.
4.1.1. The actuated pair, a prismatic joint along the X-axis direction
When the actuated pair is a prismatic joint along the X-axis, the following applies:

According to Gao et al.,[22] where each leg should include the kinematic characteristics of a parallel mechanism, the connectivity of each leg must be at least four. For the selected actuated pair, active un-actuated pairs must be chosen from the above set, while all the possible structures for each leg may be enumerated according to the different connectivity for each leg. The detailed structures of the leg for the first category are shown in Table 1. In the table, T represents the prismatic joint, R is the revolute joint, T and R denote the actuated joint and the subscript, and X, Y and Z indicate the respective axial direction. For simplicity of the structure of each leg, the axial direction of two adjacent pairs is assumed to be parallel or perpendicular with each other.
Possible architectures of the first leg

4.1.2. The actuated pair, a revolute joint around the Y-axis direction
When the actuated pair is a revolute joint around the Y-axis direction, the following applies:

When the actuated joint is a revolute pair, the connectivity of the leg should be at least five; detailed structures of the leg for the second category are also shown in Table 1.
4.1.3. The actuated pair, a revolute joint around the Z-axis direction
When the actuated pair is a revolute joint around Z-axis, the following applies:

Similarly, detailed structures of the first leg for the third category are shown in Table 1.
4.2. The second leg
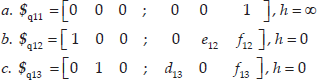
Although the fully-decoupled 3R1T parallel mechanism has three-rotational DoFs, based on the driven-chain principle, the second leg only offers direct actuation to the platform rotation around the X-axis, which means that $a2 can be written as follows:

Assuming that the actuated screw of the actuated pair is $q2=[a2, b2, c2; d2, e2, f2], the actuated screw may lead to the moving platform rotating around the Y- and Z-axes when b2≠0, c 2 ≠0, which does not equate to the desired kinematic characteristics of the parallel mechanism; therefore, $q2 should only take the following form:

Substituting Eqs. (18, 19) for Eq. (9) results in the following:

Clearly, [

Similarly, the twist of the second leg in the fully-decoupled 3R1T parallel mechanism, with the exception of the actuated screw, which is denoted by Eq. (21), can be deduced using reciprocal screw theory. Further inspection shows that the only screw system that belongs to such a complex has two categories:
A screw system with infinite pitch, whose direction can be arbitrary, in which the maximal dimension of such a screw system is up to three and the minimal dimension is two, while the directions of any two screws in the screw system are not parallel with each other.
A screw system with zero pitch, which should not only intersect with, but also be perpendicular to $a2. Its dimension is at least two, while the direction is parallel to the Y-axis and the Z-axis direction, respectively
Table 2 shows all the possible leg architectures resulting from previous considerations.
Possible architectures of the second leg

4.3. The third leg
The third leg offers direct actuation to the platform rotation around the Y-axis. A similar process to the one pursued in Subsection 4.2 can be exploited here in the construction of the third leg. The first step is as follows:

In the same way, Table 3 shows all the possible leg architectures of the third leg.
Possible architectures of the third leg

4.4. The fourth leg
The fourth leg provides direct actuation to the platform rotation around the Z-axis. A similar process to the one pursued in Subsection 4.2 can be exploited here in the construction of the fourth leg. The first step is as follows:

Similarly, Table 4 shows all the possible leg architectures of the fourth leg.
Possible architectures of the fourth leg

5. Type Synthesis of Fully-decoupled 3R1T Parallel Mechanisms
As described in Section 4, all the possible architectures of four legs, which constitute a fully-decoupled 3R1T parallel mechanism, have been constructed successfully, with each leg providing one independent actuation to the platform, respectively. In order to ensure the feasibility of the aforementioned method for the type synthesis of fully-decoupled parallel mechanisms, the type synthesis of fully-decoupled 3R1T parallel mechanisms will be discussed in this section. Due to the fact that the fully-decoupled parallel mechanism in this paper has a three-dimensional rotation feature, based on the rotation condition for parallel mechanism, any two branches of the parallel mechanism should possess a certain directional rotational DoF, while both these two branches should also accompany two translational DoFs, whose axial direction should be vertical to the aforementioned rotational axis. Therefore, when choosing a combination of four legs, it needs to pay special attention to the following principles:
When connectivity of a leg is four (just one leg with four), connectivity of the other three legs must be six.
When connectivity of a leg is five, it needs a leg whose connectivity is five. These two legs can provide three translational DoFs; for example, if the first leg offers translational kinematic characteristics along the X- and Z-axes, then the second leg needs translational kinematic characteristics along the Y- and Z-axes, such that the connectivity of the other two legs must be six.
A fully-decoupled 3R1T parallel mechanism, based on the previous method, is shown in Figure 2. It can be seen that the type for the first leg is

A fully-decoupled 3R1T parallel mechanism
In order to deduce the Jacobian matrix of the fully- decoupled 3R1T parallel mechanism, a fixed reference system, O-xyz, is attached to the base platform, where O is the geometric centre of the base platform. The corresponding input and output parameters of the mechanism are as follows. Symbol l1 actuated by a prismatic joint indicates the displacement of the first leg along the z-axis, θ1 driven by a revolute pair denotes the rotation angle for the second leg around the x-axis, θ2 driven by a revolute pair represents the rotation angle for the third leg around the y-axis, and θ3 driven by a revolute pair is the rotation angle for the fourth leg around the z-axis; meanwhile, the output parameters of the parallel mechanism are represented by the position denoted by (z) of the moving platform and orientation denoted by (α, β, γ). Owing to space limitations, the detailed kinematic analysis of the mechanism will not presented here, although the following relationship between the input and output parameters should be satisfied:

As stated in Section 3, the relationship between the generalized velocity of the parallel mechanism and the generalized velocity of drivers can always be expressed by Eq. (10); therefore, the relationship for the fully- decoupled 3R1T parallel mechanism can be obtained by deriving Eq. (24) with respect to time t:

Eq. (25) can be expressed in a matrix form, as follows:
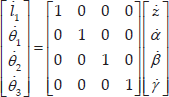
Hence,

Obviously, the Jacobian matrix
6. Conclusions and Future Works
This paper mainly addresses the type synthesis of fully- decoupled 3R1T parallel mechanisms. Conclusions and the focus of future works are presented as follows:
Within this paper, a methodology for the type synthesis of fully-decoupled 3R1T parallel mechanisms is proposed based on screw theory and the driven-chain principle; moreover, the detailed type synthesis of 3R1T parallel mechanisms is performed.
Based on the kinematic characteristics analysis of the input-output relationship for fully-decoupled parallel mechanisms, both the direct and inverse matrices for fully-decoupled 3R1T parallel mechanisms are constructed. This, in turn, provides underlying theoretical grounds for the type synthesis of four legs of the fully-decoupled 3R1T parallel mechanism.
All the possible topology architectures for four legs of a 3R1T parallel mechanism are proposed by means of reciprocal screw theory.
The Jacobian matrix of a synthesized 3R1T parallel mechanism is deduced in order to demonstrate the decoupling feature of the parallel mechanism, which also validates the correctness of the methodology for type synthesis of fully-decoupled 3R1T parallel mechanisms.
Although a methodology for the structural synthesis of fully-decoupled 3R1T parallel mechanisms was proposed by means of screw theory, two limitations should be noted:
Motors are mounted one per leg and each one of them actuates a one DoF for fully-decoupled parallel mechanisms; this is the foundation for the structural synthesis of fully-decoupled parallel mechanisms and it should be complied with strictly.
This paper only deals with type synthesis of fully-decoupled 3R1T parallel mechanisms; however, this research should also be extended to the type synthesis of general fully-decoupled parallel mechanisms. Such research will be the focus of future works.
Footnotes
7. Acknowledgements
This work reported here was supported by the National Natural Science Foundation of China (Grant Nos. 50905075, 51505190 and 51375209), the Six Talent Peaks Project in Jiangsu Province (Grant No. ZBZZ-012), the Jiangsu Province Natural Science Foundation of China (Grant No. BK20150153), the Open Project of the State Key Laboratory of Robotics and System of China (Grant No. SKLRS-2016-KF-06), the Open Project of the State Key Laboratory of Mechanical System and Vibration of China (Grant No. MSV201407), the Open Project of the Key Laboratory of System Control and Information Processing of China (Grant No. scip201506), the Open Project of Jiangsu Key Laboratory of Advanced Food Manufacturing Equipment and Technology (Grant No. FM-201402), and the Research and Innovation Project for College Graduates of Jiangsu Province (Grant No. KYLX-1115).