
Abstract
This paper presents a concept design for an Autonomous Vehicle (AxV) capable of operating throughout the ocean space; air, surface and subsea. With current autonomous platforms limited in their operation, for example aerial platforms only operate in air, ASVs only operate on the ocean surface and AUVs operate subsea, a platform which can operate, transiting and transitioning in and between air, surface and subsea, providing increased mobility is very attractive. In this paper, a novel AxV platform is described. The governing equations are presented, describing each operational mode and the transitions between modes (air to surface, surface to subsea, subsea to surface, surface to air). Results are presented based on the dimensions of existing vehicles, showing that the system is theoretically feasible.
Introduction
Ocean going autonomous platforms have a wide variety of applications, including oceanography, surveying, environmental monitoring, inspection and maintenance, search and rescue, marine archaeology and intelligence, surveillance and reconnaissance (ISR). Generally, the various platform types can be categorised as either aerial vehicles, surface vehicles and underwater vehicles.
Aerial vehicles
The history of Unmanned Aerial Vehicles (UAVs) can be dated back to World War I and the development of aerial torpedoes. 1 While the first rotary wing platform, a four-rotor helicopter, was designed by Louis Breguet in 1907. 2 Since, various aerial vehicles have been developed including helicopters, 3 vertical take-off and landing (VTOL) UAVs, 4 quadcopters, hexacopters, octocopters5,6 and even platforms that perform in flight transitions between fixed and rotary wing flight. 7 In a maritime context, UAVs have crossed the Atlantic 8 and autonomous water take-off and landing has been demonstrated. 9 More recently, several studies and demonstrations of aerial-aquatic transition have been made, including rotor based platforms10–12 and fixed wing propeller systems.13–15
Surface vehicles
The development of Autonomous Surface Crafts (ASCs), also known as Autonomous or Unmanned Surface Vehicles (ASVs or USVs), is often accredited with the MIT Sea Grant College Program which started in 1993. 16 The MIT program has led to the development of a family of autonomous vessels for bathymetric mapping and communication relay missions (see Curcio et al. 17 , Goudey et al. 18 , Manley 19 ). Although the first attempt at a wind propelled mobile surveillance platform was made in 196820 and an early hydrography ASC was developed in 1983. 17
Various monohull ASVs21,22 and catamaran ASVs23,24 have been developed. Also various autonomous sailing boats have been developed,25,26 including fixed wing-sail vessels, for example, Elkaim 27 , Cokelet, 28 and a retractable wing sail platform that can submerge. 29 Furthermore, several wave propelled platforms have been developed, for example, AutoNaut 21 , Wave glider. 30
Underwater vehicles
Underwater vehicles include floats, underwater gliders and Autonomous or Unmanned Underwater Vehicles (AUVs or UUVs). Neutrally buoyant floats were first developed, simultaneously and independently, in 1995 by Stommel 31 in the USA and Swallow 32 in the UK. Inflatable bladders were added in the late 1980s to enable the floats to surface (and dive) at regular intervals and now a global array of over 3700 profiling floats are in existence.33,34 A similar mechanism is used in underwater gliders, which were first conceived by Doug Webb in 1988 and tested in 1991. 35 Numerous Autonomous Underwater Vehicles (AUVs) have been developed including torpedo style AUVs, 36 hover capable AUVs 37 and hybrid AUV and Remotely Operated Vehicle (ROVs) platforms. 38 Several air launched AUV platforms are under development39–42 including an aerial gliding, unmanned undersea vehicle for rapid deployment. 43 However, these platforms cannot become airborne again. While at smaller scales, bio-inspired transition from water to air using jets has been demonstrated for micro air vehicles, for example, Siddall R and Kovac 44 , Hou et al. 45 which enable fast aquatic escape.
Paper contribution
Realising low power, long endurance platforms that can operate and transition between air, surface and subsea is challenging. Within the literature, there is a growing interest in aerial–aquatic platforms. However, current approaches and systems are limited in endurance and the number of transitions that can be achieved. Furthermore, the majority of studies focus on direct aerial–aquatic transition and do not consider surface operational modes.
This paper presents the feasibility of a novel concept design for a low power, long endurance Autonomous Vehicle (AxV) capable of operating throughout the ocean space; air, surface and subsea. The paper is structured as follows: Section ‘AxV concept design’ describes the AxV concept, design and general arrangement. Section ‘AxV system operation’ presents the governing equations of motion and describes the operational modes and transitions. Section ‘Performance’ presents estimates of the endurance and range for various vehicle setups and Section ‘Discussion’ discusses the practical implementation of the concept.
AxV concept design
The system, Figure 1, based on lifting surfaces (foils), exploits glider and sailing physics to provide propulsion and transition between air, surface and subsea operations. In air, the AxV operates like an UAV with fully extended foils, for example, similar to the ScanEagle. 46 While the system could be deployed from altitude and glide to the site of interest, it is expected that the AxV will also be required to fly outright, increasing the capability. On the surface, the AxV operates as an ASV with the foils acting as a fixed sail, for example, similar to the Saildrone 28 or Sailrocket. 47 While subsea, the AxV operates, with retracted foils and flooded compartments, as an AUV or underwater glider, for example, similar to the Seaglider. 48
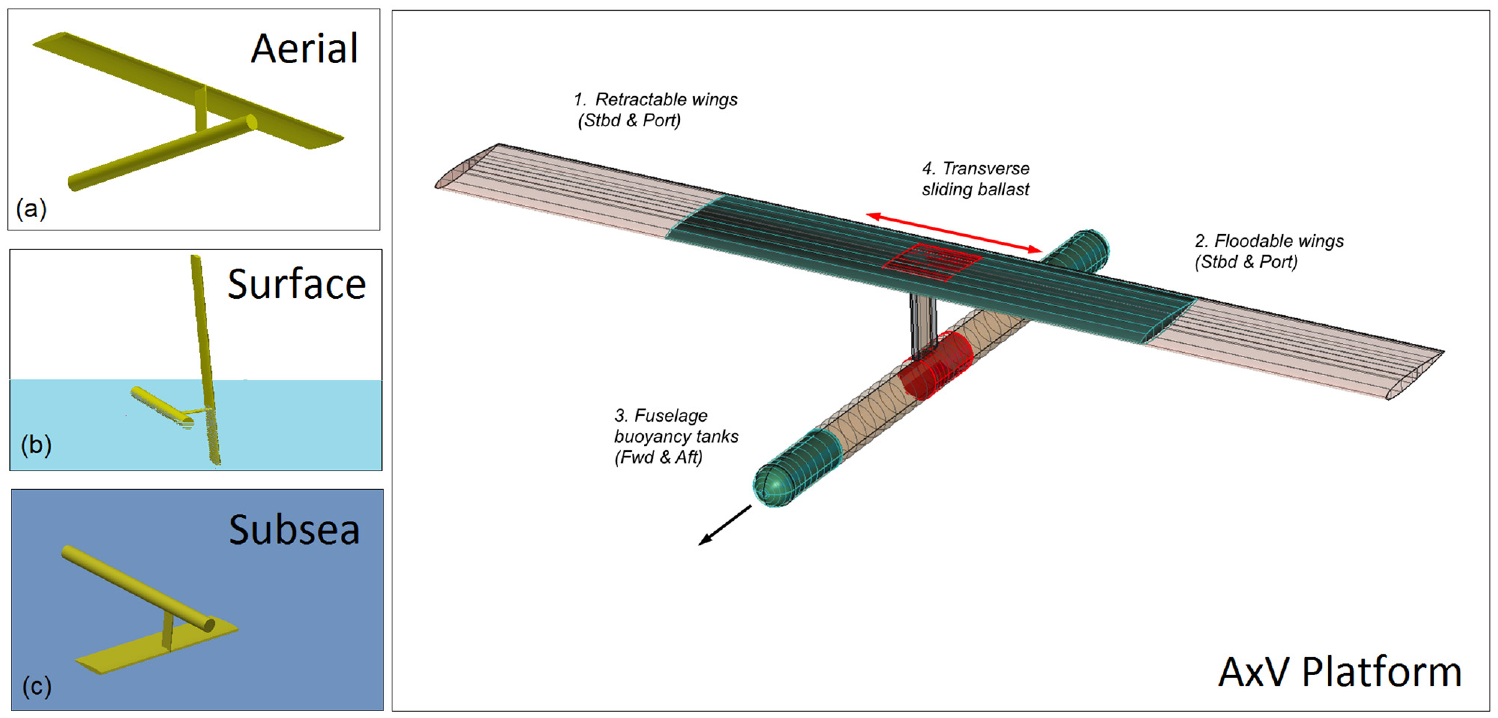
The AxV platform with floodable compartments and telescopic or inflatable foils: (a) aerial mode with extended foils, (b) surface mode with retracted foil and (c) subsea mode with retracted and flooded foils and flooded fuselage compartments.
With the air to surface transition achieved by landing on the water surface and ballasting for sailing mode operation. The surface to subsea transition is achieved by retracting and flooding the foils and fuselage compartments for underwater glider operation. The subsea to surface transition is achieved by extending the foils or expelling water from the flooded compartments and the surface to air transition achieved by motor sailing and turning into the wind (to generate increased lift) for aerial operation.
While the concept provides the capability to operate in economical modes through sailing and gliding, it is recognised that additional propulsion is sometimes necessary. Therefore, the AxV platform also comprises of a dual propulsion system, which drives an aerial propeller at the front of the fuselage and an underwater propeller at the rear. The foils are controlled from the fuselage, which houses the batteries, buoyancy bladders and tanks, the main electric motor, gearboxes, computer (CPU) & communications and payload.
Design
The design is based on the approximate dimensions of basis AUVs, ASVs and UAVs. However, to operate across air, surface and underwater, the concept requires a careful balance of volume, capacity (power) and mass. The design of the AxV followed the process (illustrated in Figure 2):
Mass: the mass of the vehicle was first considered in relation to the maximum excursion depth for the AUV mode, shown in Figure 2. This is important as the maximum depth governs the thickness of the pressure hull and, therefore, dictates the proportion of mass available for other purposes and utilities.
Volume: the balance between volume and mass defines the buoyancy that is required for the system to float in a stable condition with the foil elevated for the sailing mode as an ASV. Therefore, the fuselage and the underwater section of the wing need to be positively buoyant, which also needs to counteract the ballasting mass in the wing. This process dictates the volume and the trim required for sailing or flying (i.e. the relationships between the centre of effort, buoyancy and gravity for each mode).
Capacity: the capacity of the onboard battery power is directly proportional to the AxV capability in relation to its endurance and range of operation. In particular, the demand of powered flight requires significant battery capacity, which dictates the size and mass of the required batteries.
This design process is completed iteratively, in the same order, until a balanced result is achieved. Details are provided in the following section regarding the exact specifications for this particular AxV concept.
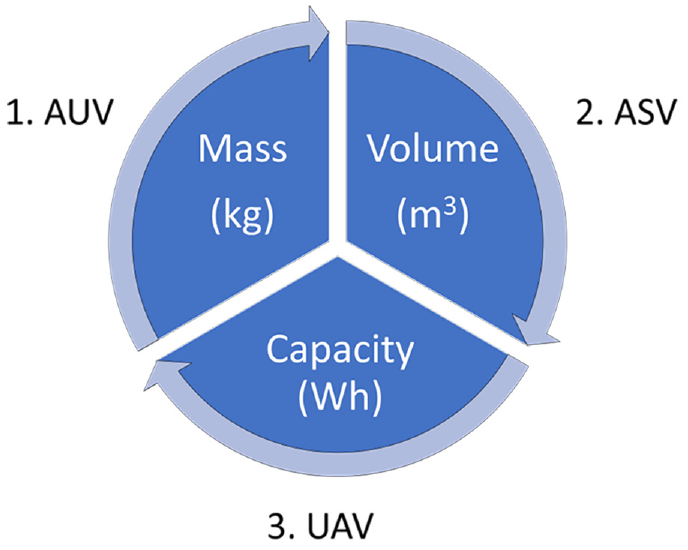
The iterative design process, starting with the AUV mass, followed by the ASV volume and then the UAV capacity.
Maximum excursion depth
Following the method described by Young and Budynas 49 and verified by Izman 50 , the pressure hull thickness to achieve a depth of 100 m is calculated to be 3 mm for an aluminium tube (calculations are presented in Appendix A.1). The underwater depth rating, which dictates the mass, was selected based on the design requirements for continental shelf operations, that is, 130 m. 51 In practice, the depth rating could be reduced, enabling a reduction in the pressure hull thickness and hence mass.
General arrangement
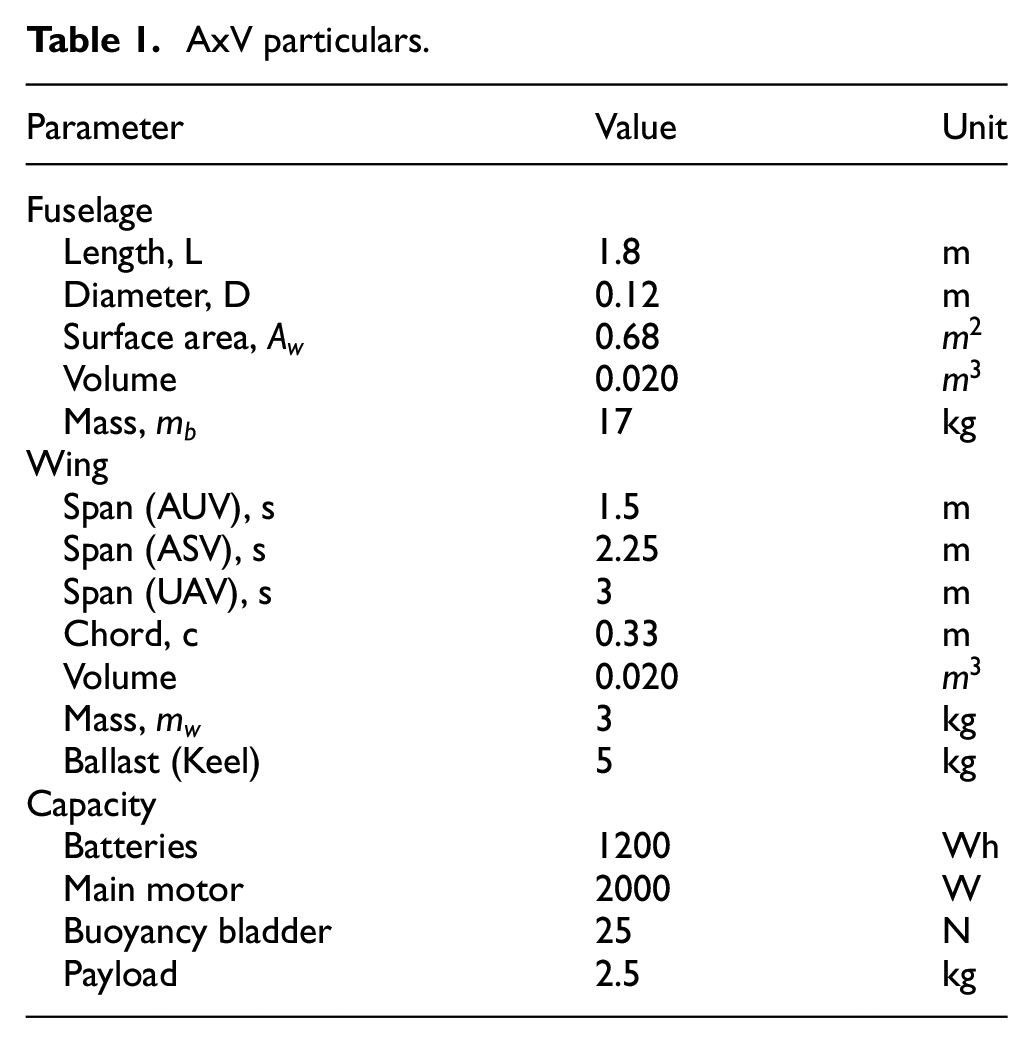
Details of the AxV particulars (mass and dimensions) are listed in Table 1, and general arrangement is shown in Figure 3. The capacity of onboard systems is also detailed in Table 1. The mass distribution of the AxV components is presented in Figure 4, which shows the dominance of the pressure hull, the batteries and moving ballast on the total mass of the system.
AxV particulars.
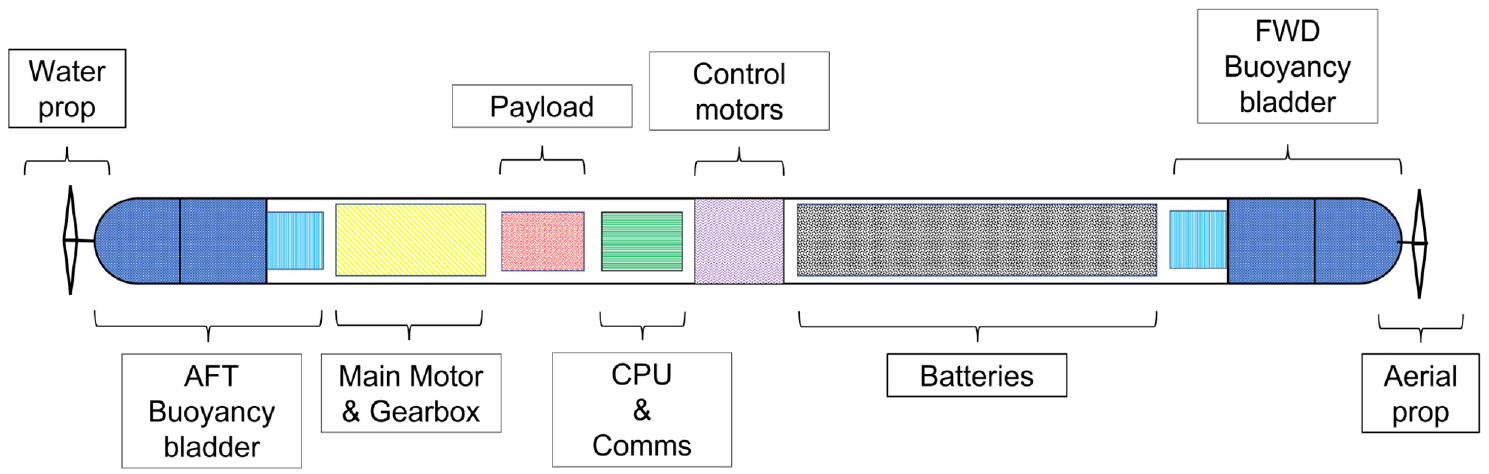
General arrangement of the fuselage.
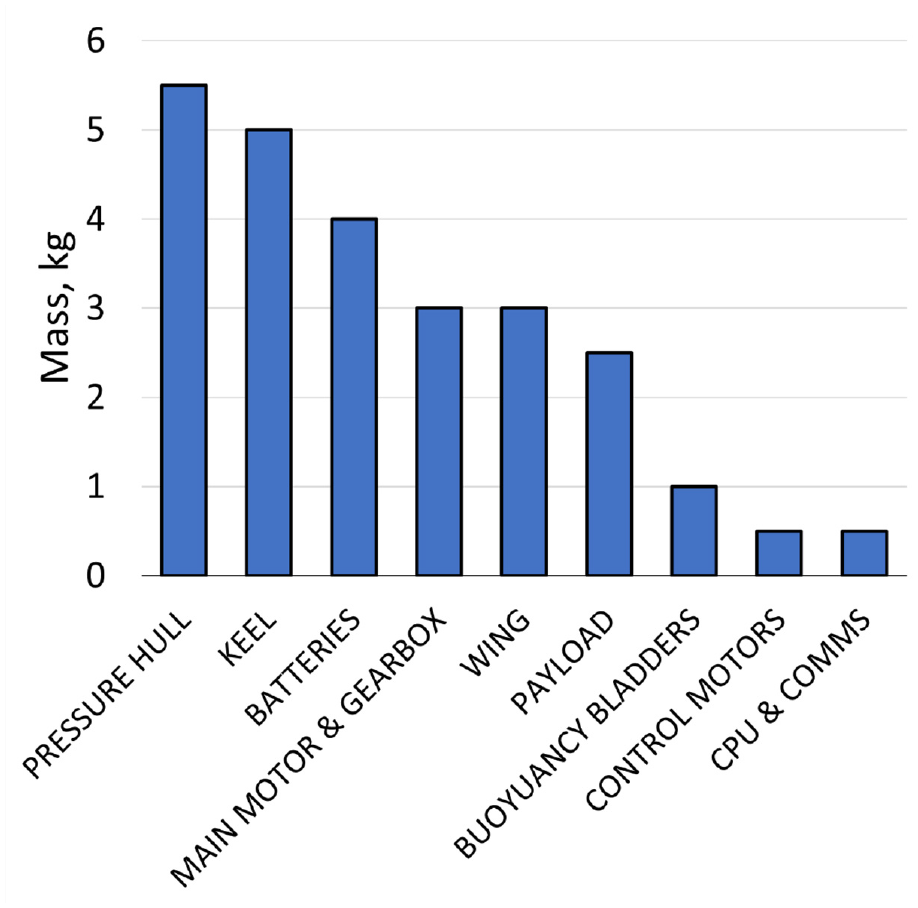
Mass distribution of the AxV components.
AxV system operation
Modes
Mode 1: Flying
The power required to drive the AxV in flight is proportional to the required flight speed (V), which is a function of the weight (i.e. mass) and size (i.e. volume) of the AxV:

where W is the weight,
Mode 2: Sailing
To be able to travel on the water surface the foil can be used as a sail. To sail, the foil is required to provide thrust, overcoming any drag.
Modelling the system as shown in Figure 5 and equating thrust to drag, the equation of motion in the body fixed (fuselage) x-axis can be expressed as;
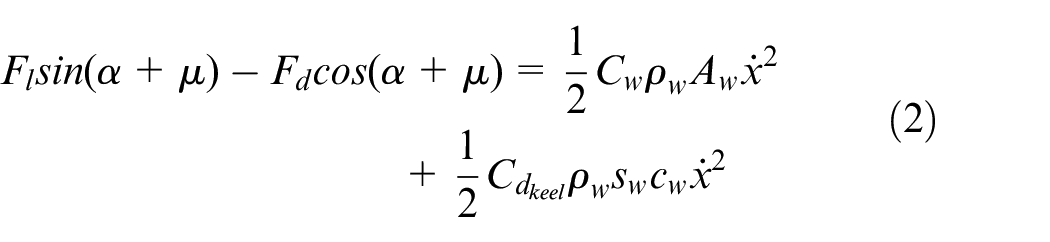
where

And

where
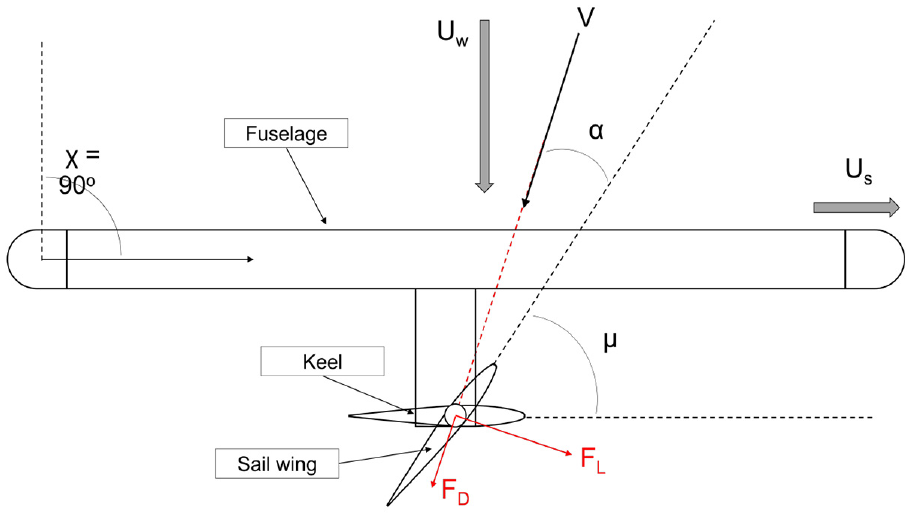
AxV Sailing mode schematic (illustrated for beam reach,
For an approximate prediction, the variables presented in Table 2 have been implemented to solve the AxV sailing speed by considering sailing 90 degrees to the wind (i.e. a beam reach) in average ocean wind conditions (see Ocean motion
52
) and assuming a fixed angle of attack. Sailing velocities of
Parameters for sailing mode.
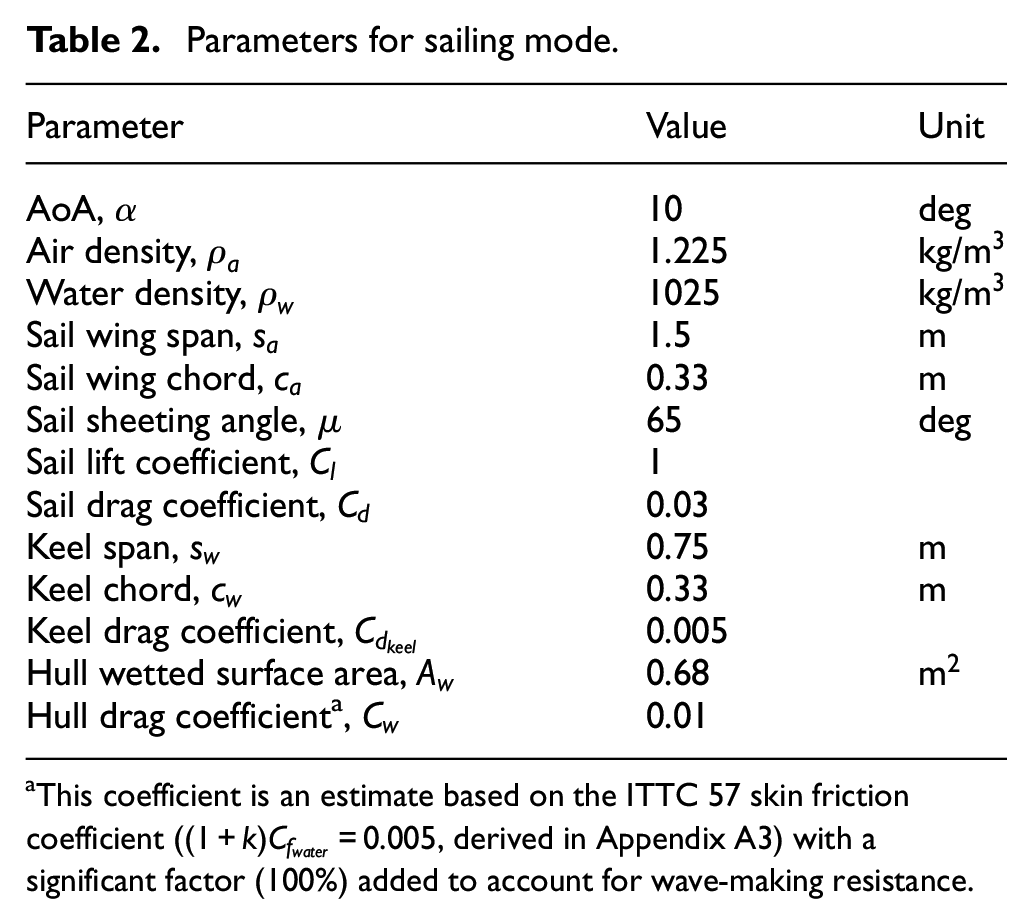
This coefficient is an estimate based on the ITTC 57 skin friction coefficient (
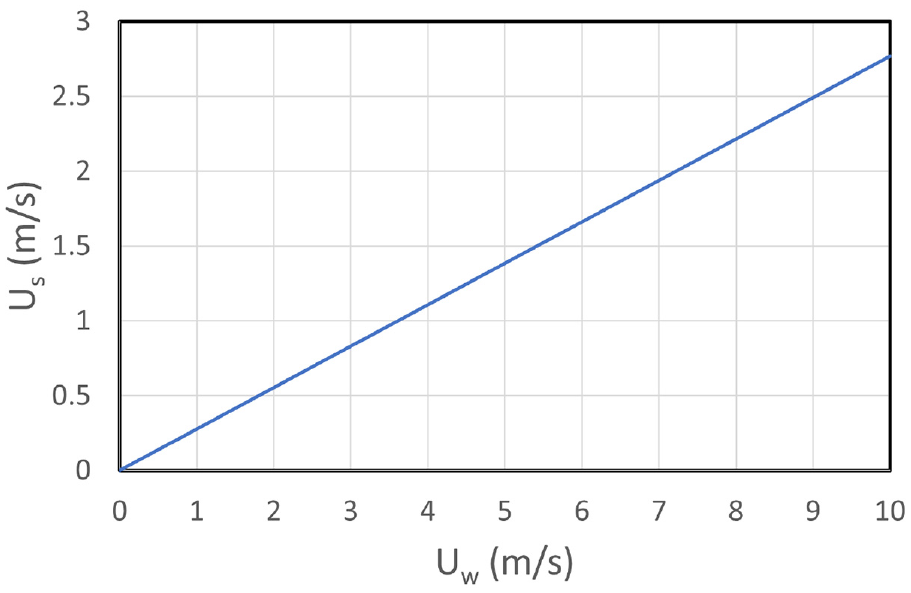
Estimated sailing velocities over a range of wind speeds.
In this mode, the underwater propeller can also be used to propel the ASV in no wind scenarios. The required propulsive power was calculated by equating the propeller thrust to the underwater drag of the hull and keel, and assuming a propeller efficiency of 0.6. A reasonable forward speed of 2 m/s was found to require 55 W of power.
Mode 3: Underwater gliding
To be able to travel underwater the AxV platform can operate as a conventional underwater glider or operate using powered propulsion, as shown in Figure 7. The AxV can control the buoyancy, pitch and forward glide using the fuselage floodable compartments as buoyancy bladders. A change in buoyancy of 25 N was calculated to result in a terminal sinking speed of 0.6 m/s. At this speed, the AUV adopts a flight angle that generates sufficient lift from the foils to produce a forward thrust and maintain the gliding speed of 0.6 m/s in the horizontal axis, which is comparable to other underwater glider systems. 54 The process is repeated through changing the buoyancy to positively buoyant and achieving a net thrust through a gliding angle back towards the surface. Therefore, the AxV platform provides the same capability as a low powered underwater glider.
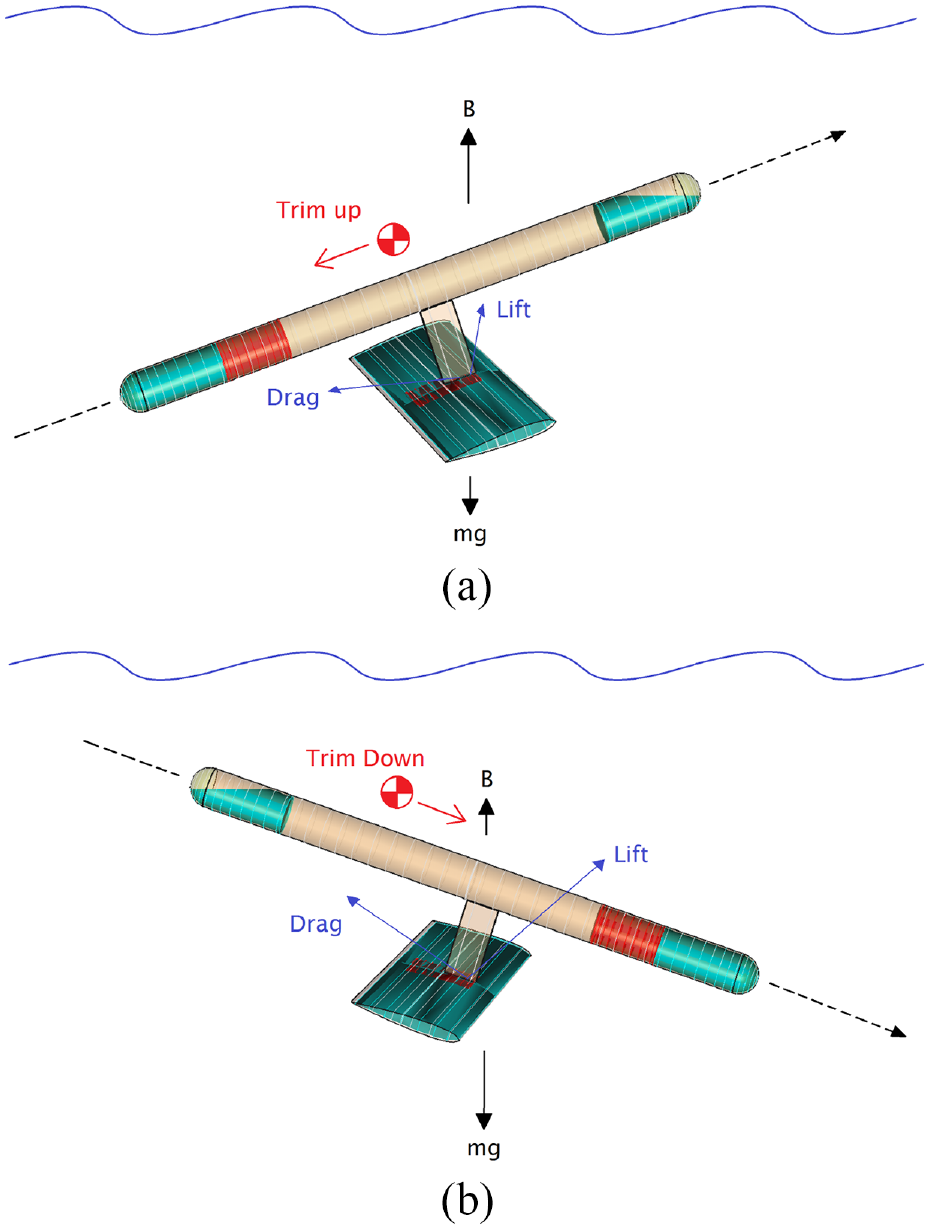
Schematic of underwater AxV operation: (a) trim up and (b) trim down.
The underwater mode can also be propelled using the underwater propeller. The same drag as the underwater gliding scenario is assumed and a cost of transport analysis was performed to derive the optimum forward speed. The propulsive power (

The cost of transport (

The cost of transport was evaluated for a range of speeds (0–5 m/s), as shown in Figure 8. The optimum speed (
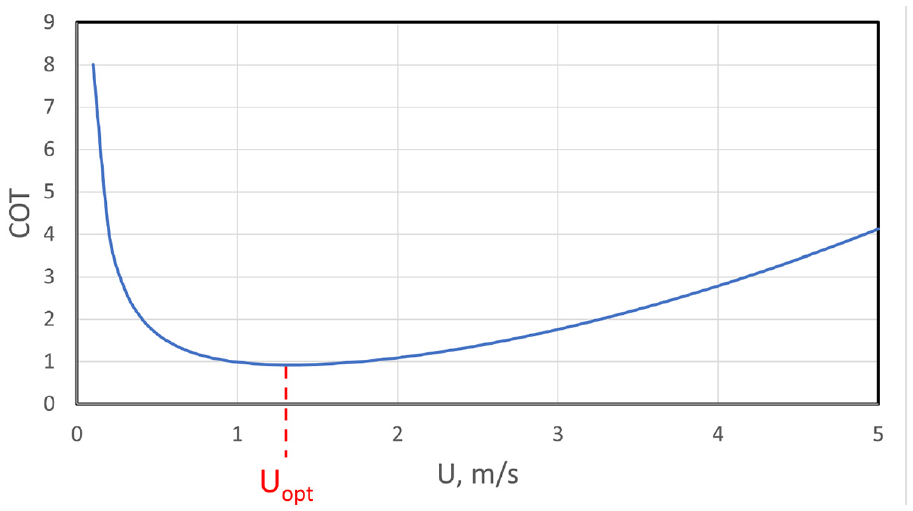
Cost of transport for the underwater mode under powered propulsion.
Transitions
Transition 1: Air to surface
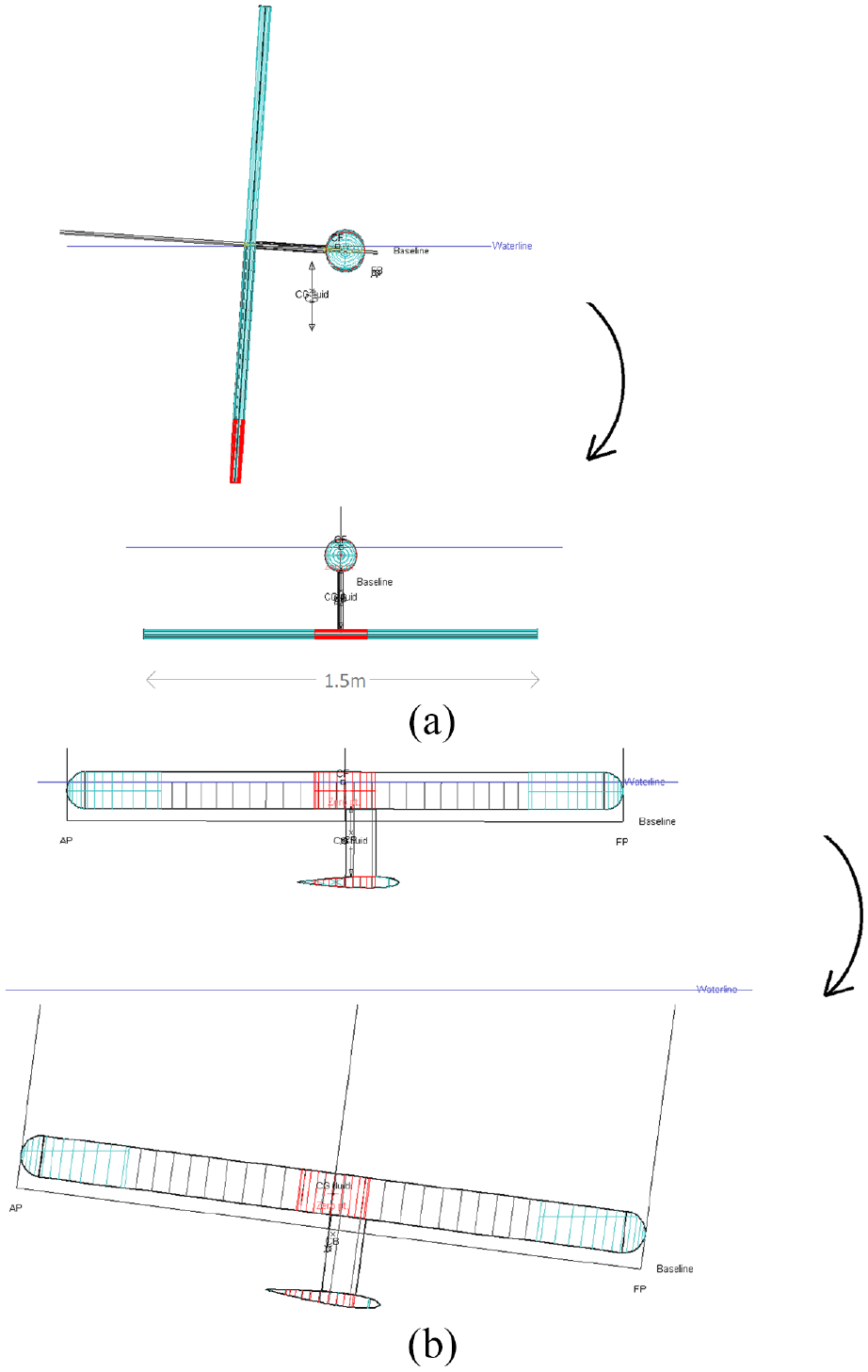
To be able to operate on the water surface, the platform needs to land and transition to sailing mode. Landing can be readily achieved, as demonstrated by the Flimmer UAV 43 (and more generally by sea planes). Based on the dimensions given in Table 1, the AxV will float on landing, as shown in Figure 9. To transition to sailing mode (floating with the foil in an upright position ready to sail) one foil can be retracted and ballasted by moving a mass. The transition does not require the platform to be flooded and the submerged foil can act as a keel/dagger-board.
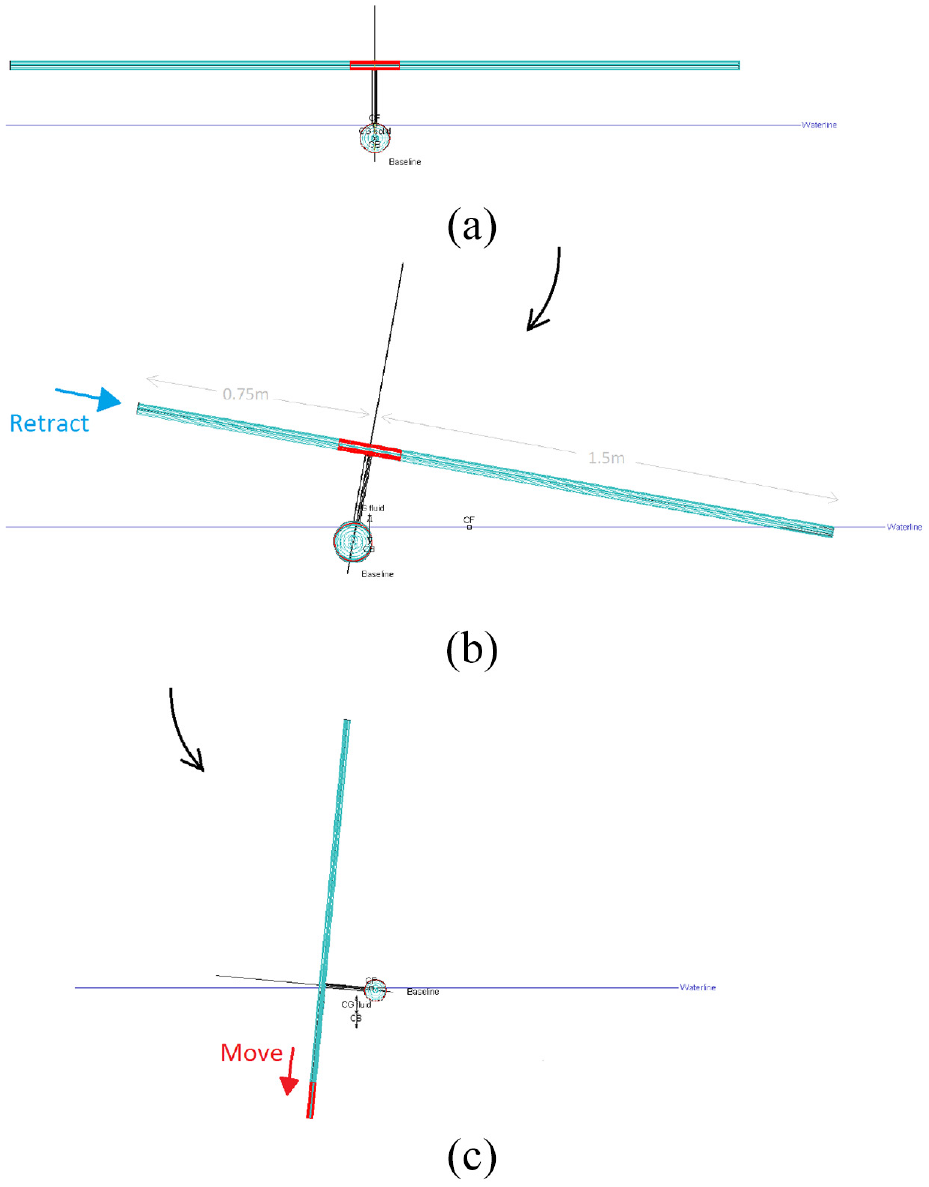
AxV transition from air to surface (sailing) mode. The AxV Platform will: (a) float, (b) heel over and (c) transition to sailing mode by ballasting and retracting one foil.
Transition 2: Surface to underwater
To be able to operate underwater, the platform needs to transition from sailing mode to subsea. This can be readily achieved by retracting and flooding the foils, flooding the fuselage compartments and resetting the transverse sliding ballast, as shown in Figure 10.
AxV transition from sailing mode to underwater gliding mode: (a) stage 1: retract and flood foils, move ballast and (b) stage 2: flood fuselage compartments (total fuselage floodable volume assumed to be
Transition 3: Underwater to surface
To be able to transition from subsea to the surface the platform needs to become positively buoyant. This can be readily achieved by either extending the foils (increasing the displaced volume) and/or expelling the fuselage or foil flooded compartments (reducing the mass). This transition is the opposite of the surface to underwater transition. Once on the surface the AxV can operate in sailing mode, as described in Section ‘Mode 2: Sailing’.
Transition 4: Surface to air (take off)
To be able to take off from the water surface, a lift force (
The power to achieve high speeds through the water is proportional to the drag of the hull, which would typically be very large unless the hull is able to plane (i.e. from the hydrodynamic lift acting on the hull). Assuming that this is achieved through careful design of the fuselage, the required propulsive thrust needs to exceed a peak in the hull drag prior to planning, beyond which the drag is significantly reduced. To evaluate the required power to achieve this, calculations have been completed using Savitsky’s theory
57
for the hydrodynamic resistance of the AxV in the sailing mode, shown in Figure 11. From these results and assuming a propeller efficiency of 0.6, the propulsive power required to exceed the resistance hump at 2.3 m/s is predicted to be
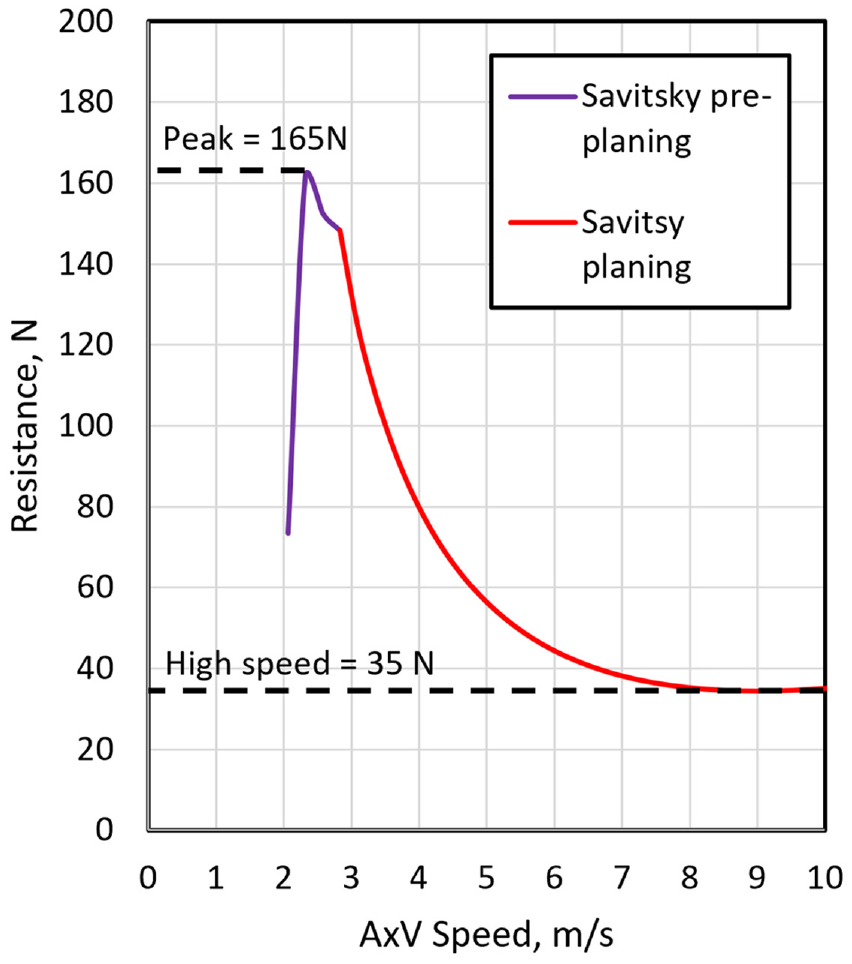
Resistance curve predicted using Savitsky’s method. 57
Performance
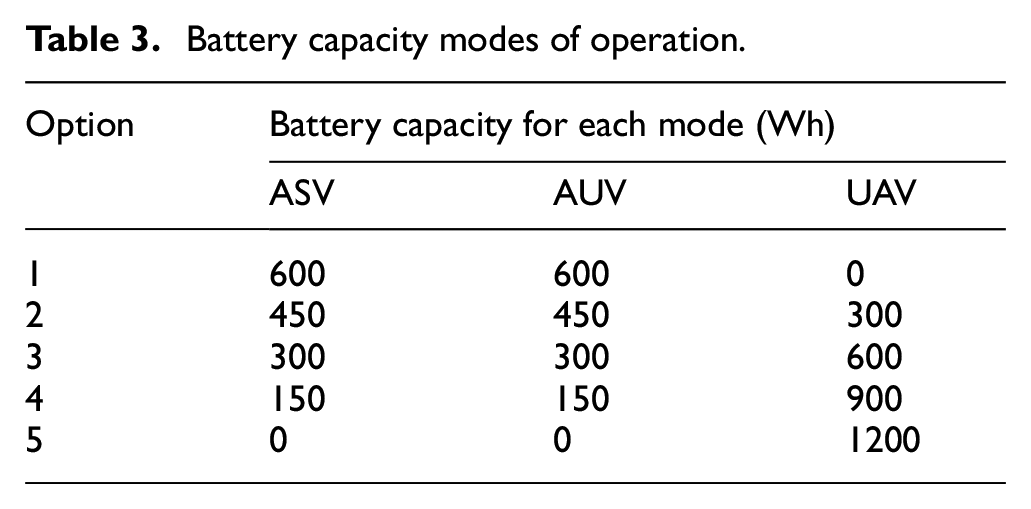
Figure 12 shows the endurance and range of the AxV for each mode based on the battery capacity distribution, which could be varied depending on the mission requirements. The battery distribution options, detailed in Table 3, have been selected based on the requirement to achieve the full aerial range, then dividing the remaining capacity between surface and underwater operations.
Battery capacity modes of operation.
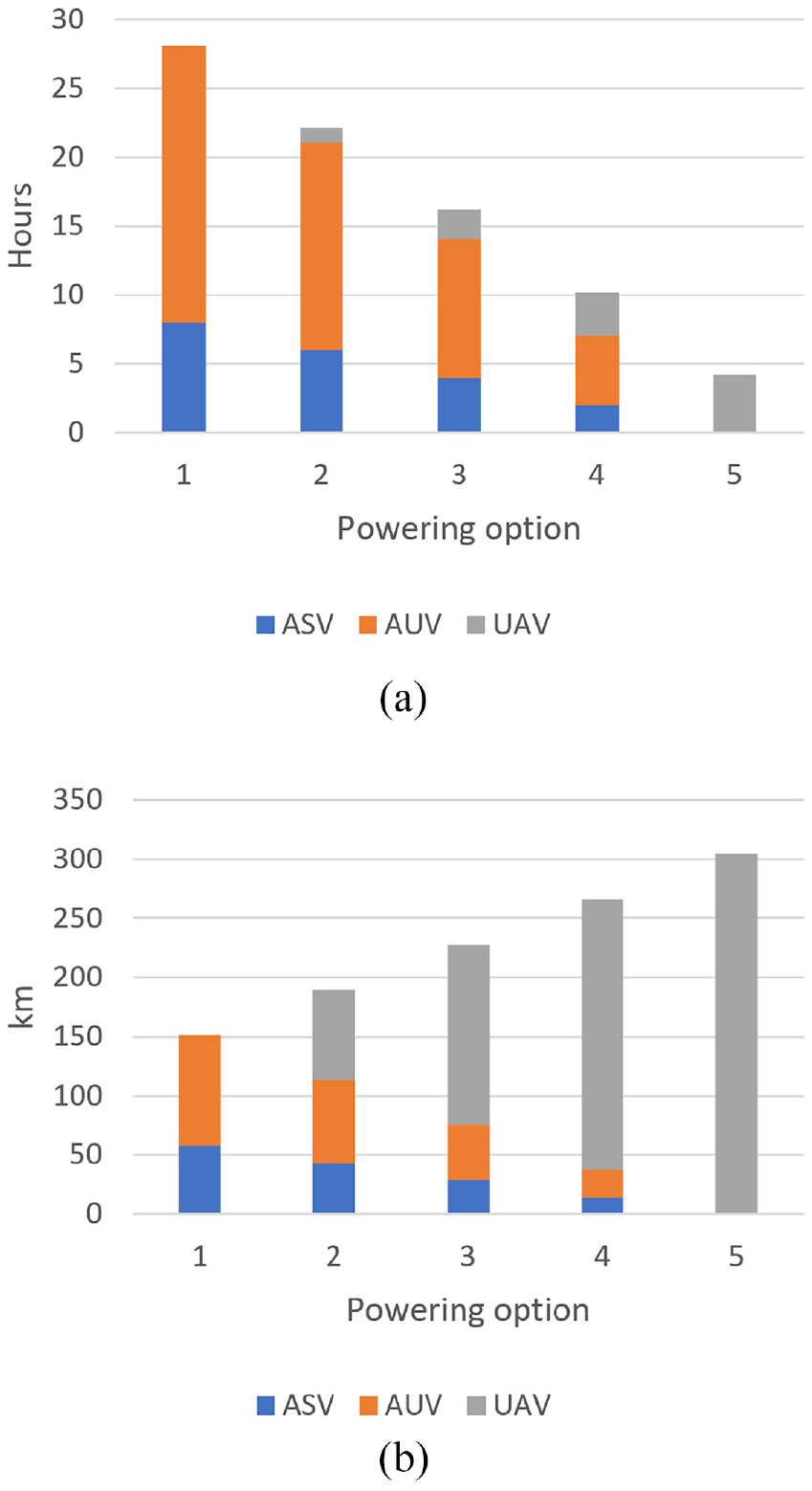
Options for: (a) endurance and (b) range for each mode.
In order to calculate the endurance and range of the AxV in each mode, it is necessary to estimate the required propulsive power (
Design speeds for each mode and propulsion method, and propulsive power for the powered mode.
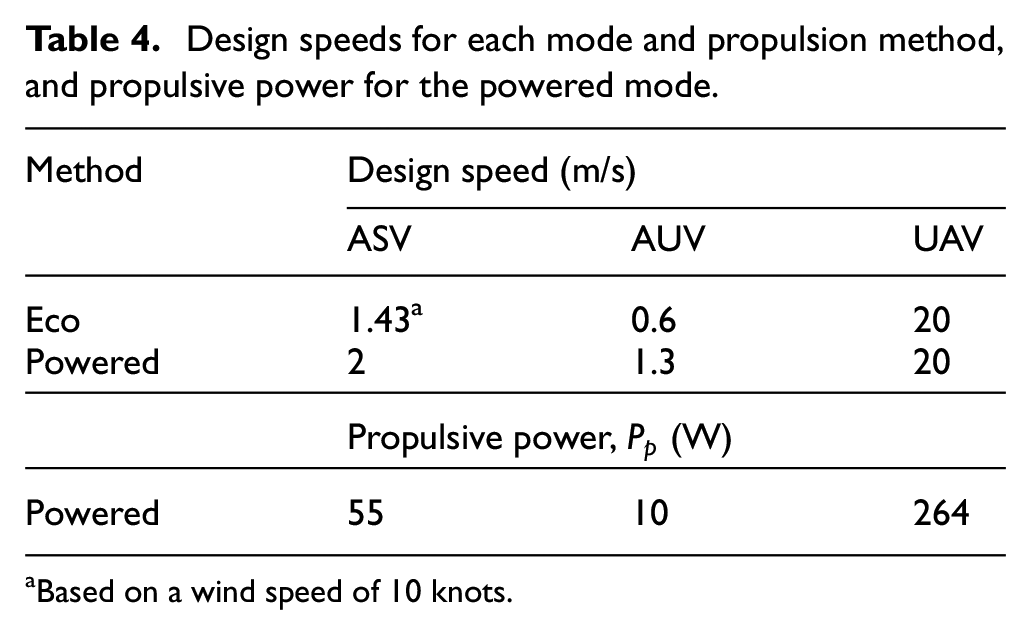
Based on a wind speed of 10 knots.
The endurance, in hours, is calculated from the energy or battery capacity (

The range, in km, is calculated by considering the design speed, in m/s:

Discussion
The proposed concept operates in air as a UAV with fully extended foils, for example, similar to existing platforms such as the ScanEagle, 46 on the surface as a fixed wing sailing ASV, for example, similar to the Saildrone 28 or Sailrocket 47 and subsea, with retracted foils and flooded compartments, the AxV operates as a underwater glider, for example, similar to the Seaglider. 48 Furthermore, similar to the Flimmer AUV, 43 the transition from air to water (landing or ditching on water) appears to be readily feasible. The transition from the surface to subsea (and vice versa) appears feasible through retracting (or extending) and flooding (or unflooding) the foils and fuselage compartments. The calculations also show that the platform can take off in certain conditions. In practice, sailing and rapidly turning into the wind with additional propeller propulsion may provide a useful means of take off in lower wind speeds.
Pathway to application
The calculations suggest that there is sufficient cross-over in the design to enable the transition between all three modes, with low power. Albeit, further optimisation and research is needed including structural and mechanical design to survive and operate in the harsh marine environment, for example, wing design, wave loading, landing loads, flooding controls. Since the range and endurance is dependent on the number and type of transitions completed for each mission, the results presented in Figure 12 are only indicative of the concept, and, with the inclusion of the energy required for transitions between each mode, the range and endurance would reduce. It is recommended that future work should also include a combined cost of transport and cost of transitioning analysis to determine optimum mission plans or strategies. In addition, to further extend endurance, solar or inertia based energy harvesting systems could also be considered, allowing in situ recharging.
The AxV is potentially a low power, rapidly deployable platform with long endurance and homing capabilities that could provide; increased mobility and extended mission capabilities (range, endurance, autonomy), greater situational awareness and persistent surveillance capabilities, reducing the need for multiple platform deployments for subsea, surface and aerial operations. Although representing a compromise in each mode of operation when compared to specialised existing platforms, the platform could be very useful for rapid and persistent surveillance as part of an Autonomous Ocean Sampling Network (AOSN).
Conclusions
This paper presented a concept design for an Autonomous Vehicle (AxV) capable of operating throughout the ocean space; air, surface and subsea. The governing equations of each operational mode and the transitions between modes (air to surface, surface to subsea, subsea to surface, surface to air) are outlined and results, based on the dimensions of existing vehicles, presented. The results show that the AxV can operate in air as a UAV, on the surface as a fixed wing sailing ASV, subsea as an underwater glider and that the transitions are theoretically possible. Through utilisation of existing sailing and gliding methods, the AxV represents a potentially low power and rapidly deployable platform with long endurance capabilities. From a scientific perspective, the platform could be very useful for oceanographic studies including atmospheric and ocean sampling or as part of an Autonomous Ocean Sampling Network (AOSN).
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.