
Abstract
Efficient cruising, manoeuvrability and noiseless performance of fish robots have been attracting people in various scientific realms. Accordingly, a number of fish robots are designed and fabricated so far. However, the existing robots are only capable of one gait of locomotion. This deficiency is addressed by UC-Ika 2 with multiple gaits of locomotion including cruising and manoeuvring that are inspired from two different fishes. This paper aims at presenting the design and fabrication process of UC-Ika 2. The swimming performance of the robot is tested and compared with its previous version UC-Ika 1.
Introduction
Undersea operation, oceanic supervision, aquatic life-form observation, pollution search and military detection are just a few examples that demand development of underwater robots to replace humans [1]. Since the best solutions are always inspired from nature, for development of an underwater robot, the nature inspiration has been also taken into account. Accordingly, a number of bio-inspired robots such as fish robots have been developed so far [2, 3, 4, 5].
A fish robot is defined as a fish-like aquatic vehicle which propels through undulatory or oscillatory motion of either the body or fins [6]. The first fish robot, RoboTuna, was built at MIT in 1994 [7]. Three years later, Vorticity Control Unmanned Undersea Vehicle (VCUUV) was developed based on RoboTuna with some improvement and more capabilities such as avoiding obstacles and having up-down motion [8, 9]. Afterwards, a number of institutes and universities developed their own fish robots with various capabilities such as cruising and turning by pectoral fins [10], cruising by undulating anal fins [11] and so on.
Nevertheless, the existing fish robots have deficiencies regarding their swimming behaviours. The fish robots have been developed to have a specific gait of swimming such as cruising, accelerating and manoeuvring. However, to accomplish marine tasks, underwater robots must be skilled for swimming in various gaits. For instance, VCUUV is a well-known tuna-mimetic robot [8]. Tuna-mimetic robots show proficiency in cruising gait of swimming, while these kinds of robots are notorious for not being manoeuvrable among narrow areas [12]. Accordingly, tuna-mimetic robots are suitable only for navigation-based tasks such as coastal monitoring, oil and gas exploration which need long distance of swimming. On the other hand, Boxybot series of robots are inspired from boxfishes and adapted for slow swimming and manoeuvring gaits [10, 13]. Boxybots are not sufficiently competent for cruising gait of swimming. Hence, these types of robots are talented for discovery tasks such as exploring shipwrecks or oil pipelines.
In order to address the single gaited motion of the existing fish robots, the authors have developed a multiple-gaited fish robot called UC-Ika 2. 1 UC-Ika 2 is designed for two gaits of swimming – cruising and manoeuvring2 – while it is capable of up-down motion. The cruising motion of the robot must be highly efficient to save energy of swimming.
The remainder of this paper has four sections. Section 2 presents the design process of UC-Ika 2 within introducing the cruising and manoeuvring gaits of motion. Section 3 discusses the fabrication step of the robot. In Section 4, the swimming performance of the robot is investigated and its cruising mode is compared to UC-Ika 1. In the last section, the paper is summarised.
Design
The primary step of developing fish robots is the design of an optimal shape and swimming mechanism corresponding to their gait of locomotion. All aquatic animals are specialised within their gait of motion. These specialities root in hydrodynamic and biological aspects of their motion including swimming forces that are acting on the fishes or generated by them and also the body (and fins) shape that fishes have. Accordingly, in order to have the optimal design for a two-gaited swimming robot, the specialised fishes in each swimming gait must be selected.
Swimming Specialities of Tuna
The investigation of the capabilities of tuna in swimming could be accomplished by studying swimming gait, swimming forces and body (and fin) shape of tunas.
Swimming Gait
The swimming gait of tuna is defined with respect to their swimming propulsors, kinematics, muscles and time-based locomotion behaviour.
Tuna is a thunniform fish which swim through undulation of the posterior part of its tail peduncle and caudal fin. The wavelength of undulation is long and wide at the trailing edge of the caudal fin. They provide thrust mainly by their stiff caudal fin. 3 The angle of attack of the caudal fin changes once it reaches its maximum amplitude in order to maximise the thrust [15].
Tuna is specialised for cruising kinematics of motion which distinguishes a part of swimming that a fish has a sustainable speed for more than 200 minutes without fatigue [16].
In terms of muscles, tuna swims using the red or slow oxidative muscles which have low power output and are, thus, non-fatiguing. The non-fatiguing nature of red muscles suits them for sustainable swimming [16].
Tuna is mainly capable of periodic motion or steady motion which continues in a long period of time to navigate long distances [17].
Swimming Forces
The dynamic behaviour of the fish robot is influenced by two main forces: hydrostatic and hydrodynamic forces. Hydrostatic forces are more essential for depth control, while hydrodynamic ones are used for swimming. However, to facilitate the swimming model with minimum energy dissipation, hydrodynamic forces need to be produced with respect to several factors. These factors are introduced as optimal swimming factors.
Hydrostatic forces such as weight and buoyancy play crucial roles in the stability of fishes. The weight, W, is defined as the mass multiplied by the gravitational constant, Mfg. On the other hand, the buoyancy, B, is defined by Archimedes’ law as the displaced mass of water multiplied by the gravitational constant, ρwVfg, where Vf is the fish volume and ρw is the density of water.
In order to keep the position of the robot stable underwater, W and B need to be equal. Additionally, the centres of mass and buoyancy must be vertically aligned, while the centre of buoyancy should be above that of the weight. This assures the attitude stability of the robot. As a pelagic fish, tuna has almost neutral buoyancy [18].
Hydrodynamic forces such as resistive and thrust forces vary from fish to fish. For a tuna-like robot, the main resistive force is associated with the pressure drag, while the main thrust force is associated with the lift force [19]. Accordingly, the pressure drag and lift forces need to be decreased and increased, respectively, in order to have an efficient swimming.
The pressure drag is the result of the pressure gradient along the body. In order to decrease this drag, the shape of the animal is a determining factor. The best overall shape of swimming animals is to have streamlined bodies with the diameter of the thickest part, d, and fish length, l. Streamlined bodies with d / l between 0.18 and 0.28 produce less than 10% of the minimum possible drag [18].
Regarding propulsive forces, tunas use vorticity method for swimming. In this method, tuna fishes generate lift forces through shedding vortices around the tips of its caudal fin [18]. These vortices make two forward and lateral forces. The forward force is the thrust of the fish, while the lateral forces will cancel out each other in a complete fin stroke. The vortex rings behind a fish is shown in Fig. 1.

Vortex rings left behind a swimming fish: (a) side view and (b) top view [20]
Larger vortex rings provide greater thrust forces. To enlarge the vortex rings, the caudal fin and the very last part of the tail peduncle make a travelling wave; see Fig. 2. The speed of the travelling wave must be greater than the speed of the fish [17]. The undulatory motion requires the caudal fin to change its orientation once it reaches its maximum heave.
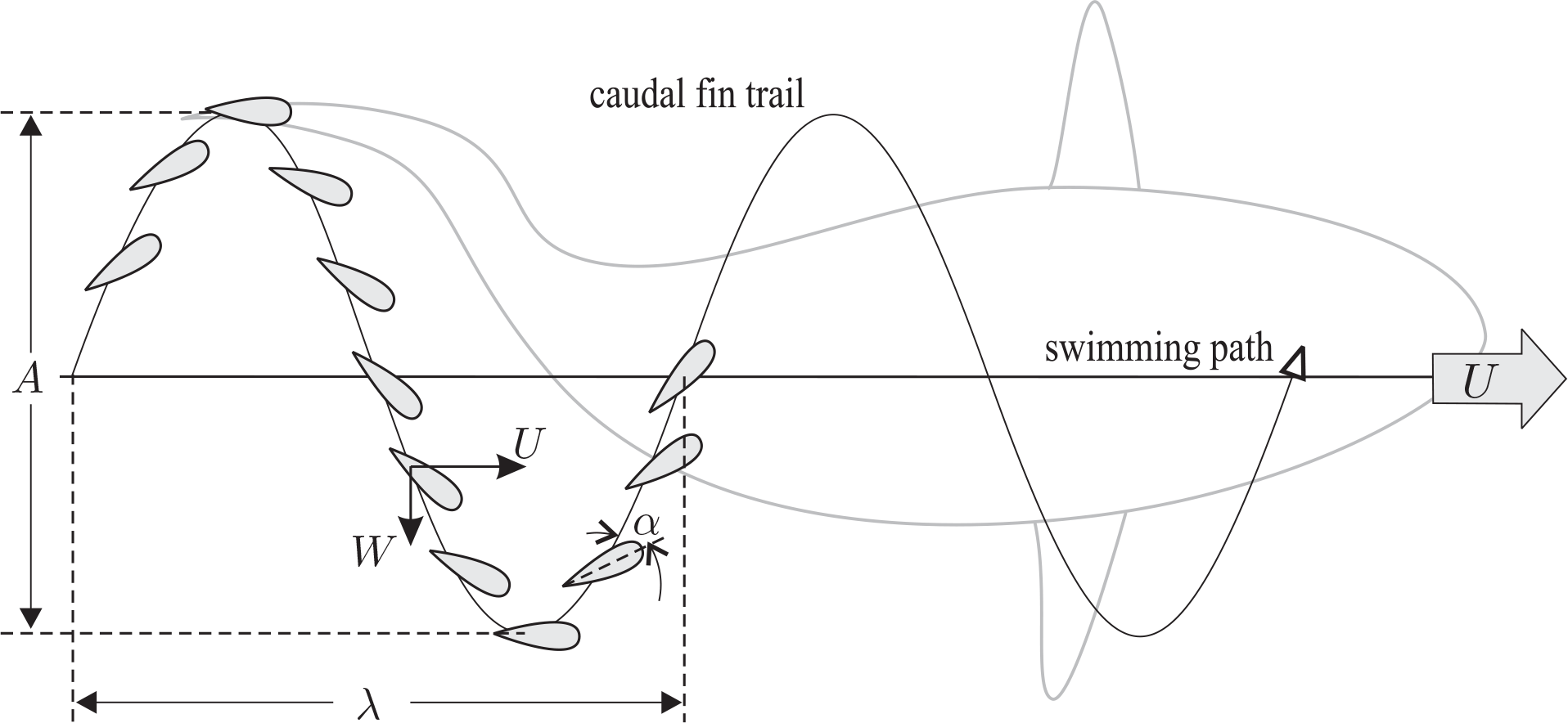
Travelling wave generated by undulatory motion of fish with the overall fish swimming speed, U; the lateral speed of the caudal fin, W; the instantaneous angle of attack of the caudal fin, α the undulation amplitude, A; and the undulation wavelength, Λ [17]
While the optimised design regarding the shape of the body and the caudal fin enhances the swimming performance of a fish robot, there exist other decisive factors of designing an efficient swimming robot. Two main criteria are taken into account in this thesis: Strouhal number and Froude efficiency.
The Strouhal number is a factor that shows the structure of the vortices made through the body undulation of fishes. The Strouhal number, St, is a dimensionless parameter. It represents the ratio of unsteady to inertial forces and is defined as

where f is the frequency of the body undulation, h is the heave of the caudal fin and
The Froude efficiency is another important factor to evaluate the swimming behaviour of fishes. This factor relates the useful power used for propulsion to total kinetic energy of the fish which is the mean rate of transferred momentum to the wake around the fish. Froude efficiency is defined by
where

where
One of the main sources of the swimming optimality of fishes is their optimal shape. However, the optimality of body shape is essentially determined by resistive forces, whereas fin shapes are optimised with respect to the propulsive forces.
Tuna has quite a streamlined body shape. The anterior part of its body is heavy, inflexible and often circular in cross section. The posterior part including the tail peduncle is lighter and flexible. The tail peduncle is strengthened by the keels located at either sides of the peduncle. Due to the keel, the tail peduncle is wider than it is deep. In addition to strengthening the tail peduncle, the keels have an important role in decreasing the drag during rapid lateral motion of the tail [15].
The main fin of tuna for swimming is its caudal fin. Tuna's caudal fin is crescent shaped with a high aspect ratio4; see Fig. 4. Its caudal fin is stiff; however, it shows a slight flexibility during powerful stroke. During the stroke of the caudal fin, the centre of the caudal fin is leading and the tips are following [15].
During undulation of tuna, the fluid around the fish is pushed and pulled laterally. These accelerations and decelerations of the fluid result in escalation of energy dissipation and reduction of swimming efficiency. Since the undulation of tuna is initiated in its tail peduncle, the joint between the caudal fin and the tail peduncle is narrow to reduce this energy dissipation. In other words, the smaller surface of the tail peduncle helps tuna to move smaller volume of water laterally. This saves the energy of tuna in cruising.
The Combination of Swimming Characteristics of Tuna and Bird-Wrasse
Considering the swimming gait and swimming forces as well as body and fin shape, tuna is an appropriate candidate for efficient cruising. However, for adding the manoeuvring gait to a tuna-mimetic robot, several design factors must be kept in mind:
Tuna has a BCF swimming mode which means that the caudal fin and the tail peduncle are engaged to the cruising gait of swimming.
Tuna has vorticity method of swimming. This mode does not tolerate any turbulence of water during cruising since turbulent water avoids the vortex generation and decreases the swimming power and efficiency.
The body shape of tuna fishes is streamlined in order to minimise the pressure drag.
Their tail peduncle has a narrow neck at its joint to caudal fin. This is due to the fact that tuna needs to decrease the drag of lateral motion of their tail. With the same reason, tuna fishes do not have any long and posteriorly extended dorsal and anal fins.
Among manoeuvrable fishes, bird-wrasses are selected for the second gait of swimming because of two main reasons. Primarily, bird-wrasses are from labriform category of swimming mode and actuated with their small pectoral fins. The nonactivated tail for manoeuvring inspired from labriforms does not interfere with the cruising motion of the robot through the tail inspired from tunas. Moreover, bird-wrasses have lift-based swimming which is compatible with vorticity method of tuna swimming. Using drag-based swimming like angelfish which has similarly labriform swimming mode increases the drag of motion.
Swimming Specialities of Bird-Wrasses
Similar to tuna, optimal swimming of bird-wrasse is investigated through discussing the swimming gait, swimming force and their shape.
Swimming Gait
The swimming gaits of bird-wrasse are defined with respect to their swimming propulsors, kinematics, muscles and time-based locomotion behaviour.
Bird-wrasses are labriform fishes which swim through the oscillation of their pectoral fins. Labriforms have two types of fin motion, either rowing like angelfish or flapping like bird-wrasse [15].
Bird-wrasses are capable of hovering and slow swimming kinematics of motion. In hovering, the fish has zero water speed with non-zero ground speed. Slow swimming is different from hovering with non-zero water speed. Besides these two swimming kinematics, bird-wrasses have comparable prolonged speed. The fish speed greater than cruising speeds and smaller than sprinting is called prolonged speed [16].
In terms of muscles, similar to the majority of MPF swimmers, the bird-wrasses employ mainly red fibres during swimming. White muscles are used among MPF swimmers for adducting the fins to reduce the drag [16].
From swimming kinematics of bird-wrasses, it could be understood that they could have both periodic and transient motion. However, due to the flapping motion of their pectoral fins, they are more capable of periodic motion rather than transient motion.
Swimming Forces
Swimming forces are divided into two groups, resistive and propulsive forces. Bird-wrasses deal with pressure drag as their main source of resistive forces. This is due to the relatively high Reynolds number of bird-wrasses. Fishes with high Reynolds number need to minimise the pressure drag rather than the skin friction drag. The description of resistive forces are presented in [23].
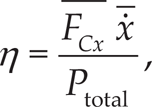
Regarding the propulsive forces, bird-wrasses have oscillatory flapping mode which is considered as a lift-based mechanism. This mechanism consists of upstroke and downstroke; see Fig. 4.
In both strokes, the vortices are made at the leading edges of the fins. As shown in Fig. 5, these vortices are in the shape of vortex rings and push the fish forward. The surface area of the fins is not involved in the propulsion.
The pectoral fins of a bird-wrasse do not behave similarly in the upstrokes and downstrokes. The speed of upstroke is greater than downstroke. Having higher speed of stroking during upstroke than that of downstroke, most of the thrust is generated during the upstroke of the fins. The path of the flapping pectoral fins is shown in Fig. 6.

Caudal fins with similar aspect ratio but different shape [18]
The flapping motion of pectoral fins of bird-wrasses

Vortex rings generated by pectoral fins [25]

The pathway of flapping pectoral fins of bird-wrasses (U is the overall swimming speed) [19]
The lift-based mechanism and generation of vortex rings are further discussed in [23].
For optimal swimming, fishes have also optimal body and fin shape. However, the optimality of body shape is essentially determined by resistive forces, whereas fin shapes are optimised with respect to the propulsive forces [15].
Bird-wrasse needs to minimise the pressure drag. In order to do so, bird-wrasses have a streamlined and compressed body shape. The compressed shape of the body enables the fish to generate less drag and to be more flexible for turning and manoeuvring. Contrary to several fishes like tuna that have a narrow neck at the posterior part of their tail peduncle, the bird-wrasses have deep tail peduncle extended by dorsal and anal fins. The deep tail peduncle of bird-wrasses is used for steering of the fish.
Bird-wrasses swim through the lift-based mechanism of their pectoral fins [25]. Accordingly, the pectoral fins of bird-wrasses need to have high aspect ratio, which means large span and short chord, since in lift-based mechanism the propulsion is made by the leading edge of the fins. Enlarging the surface area of the fins decreases the thrust generation and increases the drag forces. Notice that bird-wrasses adduct their pectoral fins during their motion to decrease the drag forces further.
The caudal fin of bird-wrasses, however, has low aspect ratio since the caudal fin with the aid of the tail peduncle and dorsal and anal fins are used for steering of the fish during manoeuvring [15].
Design of UC-Ika 2
UC-Ika 2 is designed to be specialised for cruising and manoeuvring. Taking the swimming specialities of tuna for cruising and bird-wrasse for manoeuvring as well as up-down motion capability into account, UC-Ika 2 is designed as shown in Fig. 7.
The CAD design of UC-Ika 2
The design issues of UC-Ika 2 to combine tuna and bird-wrasse are discussed in detail with respect to its shape, cruising, manoeuvring and up-down motion mechanism.
The robot consists of two main parts: the main body and tail. The main body is designed as a rigid part and contains all stationary components such as batteries, microcontroller and DC motors. The pectoral fins and their actuation mechanism are also a part of the main body. Moreover, the actuation mechanism of buoyancy control system is located inside the main body. The tail includes a flexible tail peduncle and a rigid caudal fin. Inside the tail peduncle, the undulation actuation mechanism is located.
The body shape of UC-Ika 2 is inspired from both aforementioned fishes. Those parts of the main body that are necessary for optimal cruising are mimicking tuna, while the rest are inspired from bird-wrasse. UC-Ika 2 has a streamlined body shape with deep and compressed body shape scaled from tuna and bird-wrasse. The body shape of tunas has been described in the previous section.
The tail part including the tail peduncle and caudal fin is used for cruising mode inspired from a tuna. Accordingly, the tail peduncle has a narrow neck at its connection to the caudal fin. The caudal fin is stiff with a high aspect ratio. The pectoral fins resemble the bird-wrasse fins with a different scale. The fins have five ribs with a flexible material surrendering the ribs to guarantee the flexibility of the fins; see Fig. 8. Similar to the body shape and dimensions, the aspect ratios of the caudal fin and the pectoral fins are scaled from the real tuna and bird-wrasse, respectively.

The CAD design of pectoral fins of UC-Ika 2
The cruising mechanism of UC-Ika 2 is introduced in [23] and shown in Fig. 9. However, the tail mechanism is optimised using PSO algorithm described in [14]. This mechanism is actuated by a DC motor which is located inside the main body. The rest of the mechanism including three links is inside the flexible tail peduncle. The motor directly actuates link 1, but the other links are passively actuated through geometrical constraints shown in Fig. 10.
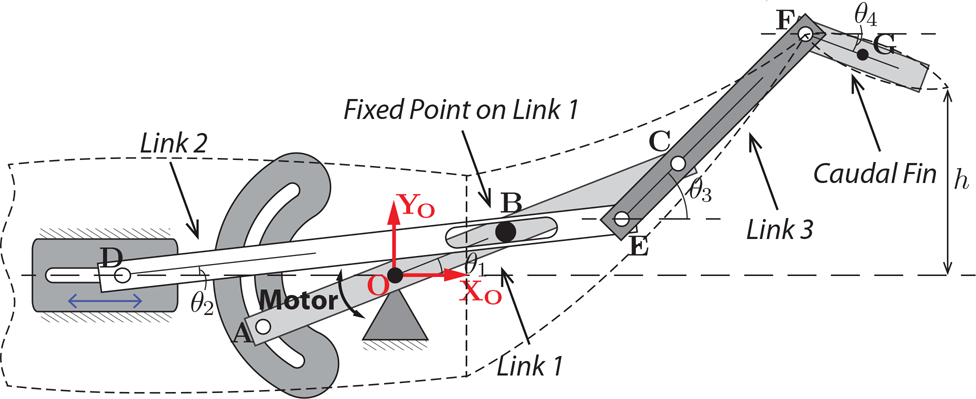
The link mechanism of the tail peduncle

The CAD design of tail mechanism of UC-Ika 2
This mechanism is capable of mimicking the optimised undulatory swimming of tunas. Moreover, since tunas change their caudal fin orientation at the end of each stroke, a flexible joint between the caudal fin and the tail peduncle is designed. The angular motion of the caudal fin is depictedin Fig. 11.
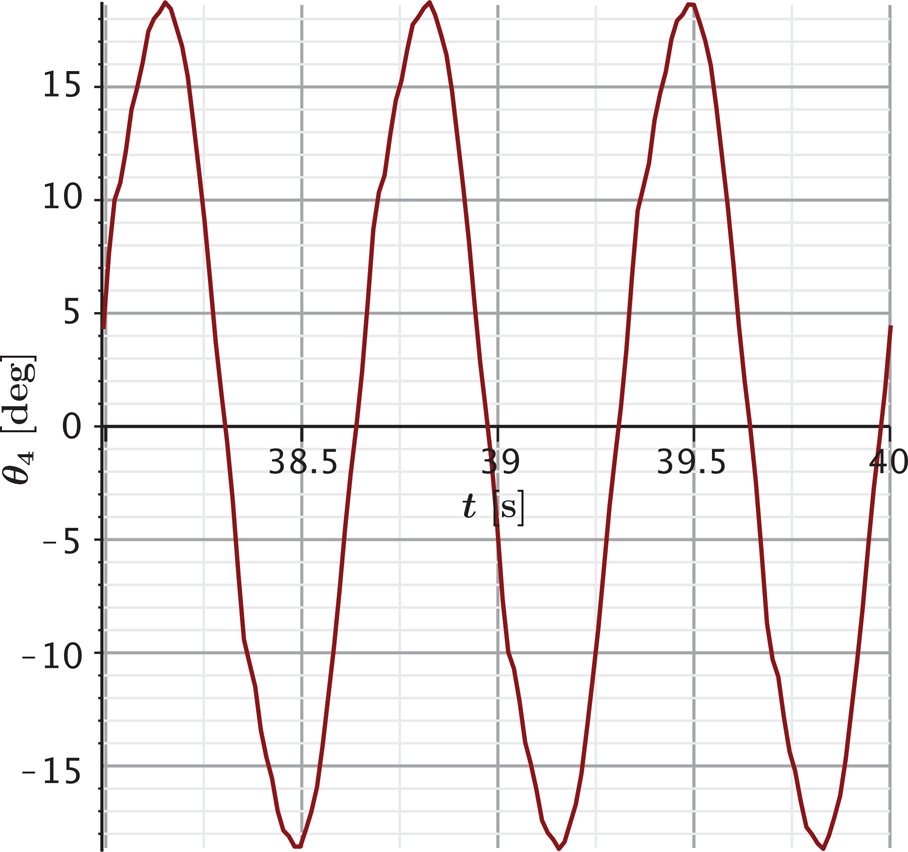
The angular motion of the caudal fin
The pectoral fin actuation is actuated with two independent separate DC motors. Each DC motor is connected to a cam and slider mechanism which is connected to the link rod. One of the ribs of each pectoral fin is connected to the link rod; see Fig. 12.
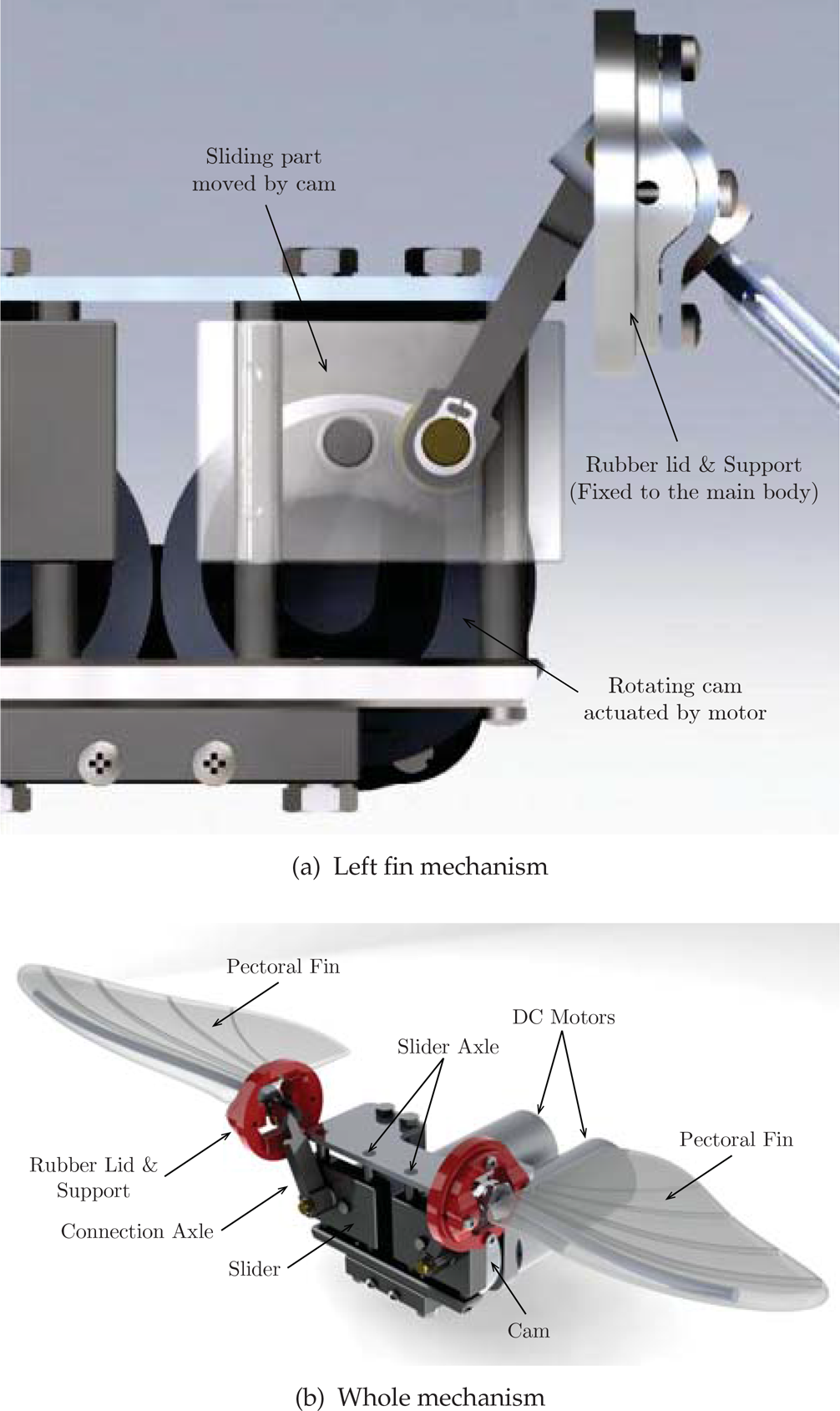
The CAD design of pectoral fin actuation system of UC-Ika 2
This mechanism converts the rotational motion of the motor into flapping motion of the fins with different upstroke and downstroke speeds, similar to bird-wrasse flapping motion shown in Fig. 6.
The design parameters of the robot is presented in Table 1.
Static depth control through playing with the buoyancy and the weight of the robot is targeted for up-down motion. Indeed, a mechanism similar to ballast control system of submarines is designed to change the weight of the robot through filling and draining its container with water. In other words, the balance of hydrostatic forces is employed in the system to raise and lower the robot. When the syringe is filled with water, its Mf and, accordingly, W increase, while ρ w Vfg, B, is constant. Then the robot sinks. On the other hand, draining the water decreases W in comparison with B and the robot float.
The mechanism as shown in Fig. 13 is consisted of a DC motor, a cylinder and a gear system that converts the rotational motion of the motor into translational motion of the piston in the cylinder. The buoyancy control system also makes benefit of two mechanical switches that turn off the motor when the cylinder is filled with or drained from water. This mechanism is designed only to enable the robot to have cruising and manoeuvring underwater at a specified depth.

The CAD design of buoyancy control system of UC-Ika 2
The final step of developing biomimetic swimming robots is the fabrication step. In this step, several issues are to be dealt with. Primarily, the fish-mimicking robots have intricate shapes to meet the optimal performance of fishes. This shape cannot be simply made by the conventional machining tools.
Besides, the swimming robots have rigid and flexible parts. The latter must be flexible enough to not demand additional motor torque during bending. Simultaneously, the flexible part has to be stiff enough to stand the pressure of water column.
Moreover, similar to the other underwater robots, the fish robots have waterproofing issues which is more challenging since the electronics and actuation mechanisms inside the body of the robot need to be accessible.
The last issue returns to the underwater communication problem. An underwater robot cannot be remotely controlled without an antenna that is coming out of the aquatic environment, whereas the antenna affects the hydrodynamic behaviour of the robot underwater.
The aforementioned issues are addressed in the fabrication of both UC-Ika 2.
Fused Deposition Modelling
In order to build the intricate shapes, a rapid prototyping method called Fused Deposition Modelling (FDM) is applied. FDM is a 3D printing technology directly using the CAD model. Then the design is fabricated layer by layer using two different melted materials as the base and support materials. The base material, Acrylnitril-Butadien-Styrol-Copolymerisat (ABS), is in fact the actual material of the fabrication. After 3D printing, the support material is resolved and removed from the part in a 70°C hot alkaline bath [26].
Constant parameters of UC-Ika 2 after optimisation

Constant parameters of UC-Ika 2 after optimisation
FDM method is employed for fabrication of complicated rigid parts including the outer surface of the main bodies of UC-Ika 2.5
In order to build the flexible parts, polydimethylsiloxane (PDMS) silicone Sylgard 184 is selected. This silicone is durable, tensile and resistant against water and most solvents [27]. The silicone is made up of two components including base and curing agent. These two components need to be combined and poured into a mould. The solidifying of the tail takes approximately 72 hours.
This method of fabrication is applied for fabrication of the tail peduncle of both robots.
Fabrication of the pectoral fins of UC-Ika 2 is slightly different since its ribs (shown in Fig. 14) are rigid and PDMS is around it. Accordingly, a mould including the ribs is made with FDM method, and then the silicone is poured into the mould which covers the ribs. When the silicone is solidified, the ribs are detached from the mould and left inside the silicone. Note that the main rib is made from aluminium and is not attached to the mould.

The pectoral fin of UC-Ika 2
The actuation mechanisms of both robots and pectoral fins of the first robot are fabricated with commonly known fabrication machines. The materials used in the actuation mechanisms are steel and aluminium.
Cruising Actuation Mechanism
The tail mechanism of both robots has similar kinematic principles; however, the tail mechanism of UC-Ika 2 is optimised. The first tail mechanism shown in Fig. 15 is made up of both steel and aluminium, while the second tail mechanism is mainly from aluminium to decrease its weight and, thus, its mass moment of inertia. 6 The caudal fin of UC-Ika 2 is made from plywood that is filed and polished to have a streamlined shape.

The tail mechanism of UC-Ika 2
The actuation mechanism of pectoral fins of UC-Ika 2, shown in Fig. 16, is fabricated using steel. Instead of aluminium, steel is employed in order to increase the weight of the robot and also decrease the friction when two surfaces of steel are in contact with each other during motion. In fabrication of actuation system, one microswitch is employed for synchronisation of the flapping motion of the pectoral fins together since the pectoral fins use two separate motors.
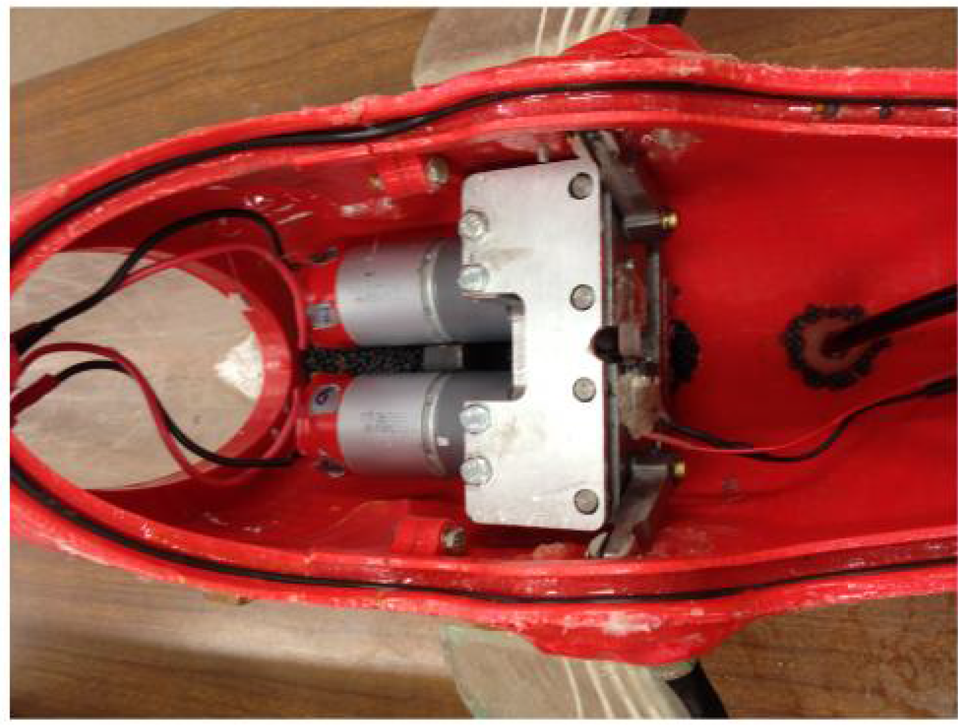
The pectoral fin actuation mechanism of UC-Ika 2
For fabrication of buoyancy control system of UC-Ika 2, a syringe as a cylinder of holding water is employed where its shaft is actuated by a DC motor. The mechanism of buoyancy control system converts the rotational motion of the motor to translational motion of the shaft of syringe. To ensure that the cylinder is filled with or drained from water, two limit switches are used in the path of the piston of the cylinder. Figure 16 illustrates the buoyancy control system.

The buoyancy control system of UC-Ika 2
Besides tight connections of the caudal fin and the tail peduncle and also the tail peduncle and the main body with a pretension in the tail peduncle, the body is coated with epoxy resin to avoid passing of water through the body over time as it is slightly porous. Moreover, the caudal fin in UC-Ika 2 which is made from plywood is coated with polyurethane to ensure its water resistance without degrading its flexibility.
Communication
To solve the communication problem underwater, a microcontroller is employed. For UC-Ika 1, an open-loop controller is designed and coded into an Arduino Uno microcontroller to control 12V DC gear head motor of the fish. This controller could communicate with any Bluetooth device like computers and smartphones using a Bluetooth connector. In UC-Ika 2, the microcontroller controls four 12V DC motors and three limit switches. The codes of both microcontrollers are available upon request.
Assembly
Besides the actuation mechanisms and electronic parts including batteries, microcontroller, motor shields and Bluetooth device, several pieces of lead and steel as well as lead shots are provided to compensate the difference between the buoyancy and the weight of the robots calculated during the design. The difference is worse in UC-Ika 2 where 2.42 kg is needed to have a neutral buoyant robot. UC-Ika 1 & 2 after complete assembly are shown in Fig. 18.

UC-Ika 2 after assembly
In order to analyse the swimming performance of UC-Ika 2, it is tested in a 5×15m2 pool. A motion analysis software is also employed to make the graphs of motion in order to compare with the simulation results. 7 UC-Ika 2 is able to cruise and turn. In cruising mode, only the tail peduncle and the caudal fin are undulating, while the pectoral fins are stationary. The graph, shown in Fig. 19(a), reveals that the robot is swimming linearly in time with a slope of 0.246 which is the average cruising speed of UC-Ika 2. 8 This curve matches the simulation results done for the robot. The simulation is explained in [14].
Regarding cruising speed of the robot, it must be mentioned that the speed analysis of the robot shows that it has periodic motion (see Fig. 20) similar to results obtained from simulation.
Similar to UC-Ika 1, the swimming parameters of UC-Ika 2 are obtained, given in Table 2. The computation of the swimming forces is explained in [29].
Swimming parameters of UC-Ika 2

Swimming parameters of UC-Ika 2
Through these results, Froude efficiency and Strouhal number of the robot are calculated. UC-Ika 2 has an efficiency of 89% and Strouhal number of 0.37. These values of efficiency and Strouhal number confirm the optimal swimming performance of the robot in cruising.
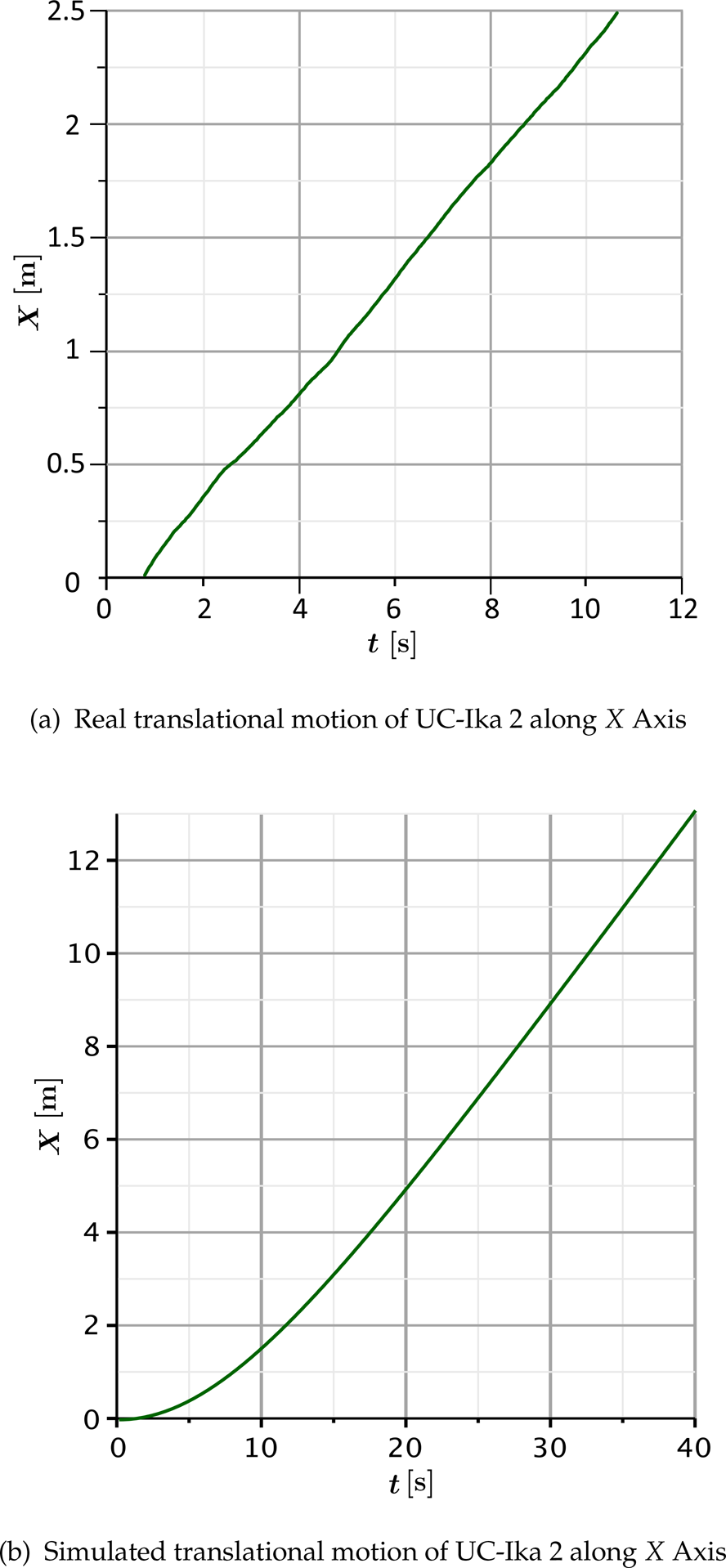
Speed of the fish robot along X -axis
The cruising motion of UC-Ika 2 is also compared with its previous version, UC-Ika 1, which is introduced in [29] and shown in Fig. 21. Despite UC-Ika 2, the constant parameters of UC-Ika 1 are not optimised. Accordingly, Froude efficiency and Strouhal number of UC-Ika 2 are far better than those of UC-Ika 1. The efficiency and Strouhal number of UC-Ika 1 are equal to 78% and 0.72, respectively.

Periodic speed of UC-Ika 2 along x -axis

UC-Ika 1
Besides cruising, UC-Ika 2 is also able to turn by its flapping pectoral fins similar to the flapping fins of bird-wrasses (see Fig. 6), while its tail peduncle and caudal fin are stationary. The motion analysis of the pectoral fins shows the path of the fin in flapping; see Fig. 22
The turning motion of the robot in both directions is also tested. In order to turn left, the right pectoral fin of UC-Ika 2 flaps while its left pectoral fin is stationary and vice versa. The test shows that the robot is able to turn left with a speed of 2.47deg/s (at the beginning of the motion) and turn right with a speed of 5.24 deg/s. In other words, in swimming to the left, the robot needs to go forward for 2.36m with its right pectoral fin in order to have the lateral motion 0.967m in 9s. Similarly, in swimming to the right, the robot needs to go forward for 0.97 m with its left pectoral fin in order to have the lateral motion 0.59m in 6s. The difference between the speed of turning towards left and right directions is due to the different thickness of the left and right fins caused in the fabrication process. The thickness of fins determines their flexibility which plays an essential role in their thrust generation. 9

The flapping path of the pectoral fins in comparison with the simulation result
The existing fish robots are only capable of one gait of motion. In other words, the fish robots are optimised in one type of motion like cruising or manoeuvring. This limits the performance of the robots. To address this problem, UC-Ika 2 with multiple gaits of locomotion including cruising and manoeuvring is fabricated.
In the design process of UC-Ika 2, the optimal swimming characteristics of two fishes – tuna for cruising and bird-wrasse for manoeuvring – are mimicked. The robot in cruising mode swims by means of its tail peduncle and caudal fin. In manoeuvring mode, the tail part of the robot is stationary and its pectoral fins flap.
Using FDM method, the intricate shape of rigid parts of the robot is fabricated. The flexible part is also made with PDMS materials. The actuation mechanism is also made using conventional machining tools. For waterproofing the robot, it is painted with epoxy resin. Regarding communication, the robot uses a microcontroller that has a Bluetooth connector to connect to any Bluetooth device like computers and smartphones.
The experimental analysis shows that the robot with Froude efficiency of 89% and Strouhal number of 0.37 is an optimal swimmer in cruising mode. In comparison with the previous robot, UC-Ika 1, the robot shows improved cruising performance. Besides, the robot is also capable of manoeuvring similar to bird-wrasses. The robot turns left with a speed of 2.47 deg/s and turns right with a speed of 5.24deg/s. The difference in the speed of turning is due to the fabrication inaccuracies of actuation mechanism of pectoral fins.
Footnotes
1
The name of the fish robots originates from the Maori name “ika” which means fish.
2
Usually, using the term swimming gaits causes a confusion regarding the swimming behaviour of the robot. In other words, claiming that a robot is single gaited, for instance, in cruising does not mean that the robot is not able to manoeuvre or accelerate. But the swimming properties of the robot – explained in [![]() ] – is optimised only for one gait of motion like cruising. Hence, having a multiple gaits of locomotion delivers the idea of having swimming characteristics of different gaits. In terms of UC-Ika 2, the robot has swimming characteristics of two distinct gaits of motion including cruising and manoeuvring.
] – is optimised only for one gait of motion like cruising. Hence, having a multiple gaits of locomotion delivers the idea of having swimming characteristics of different gaits. In terms of UC-Ika 2, the robot has swimming characteristics of two distinct gaits of motion including cruising and manoeuvring.
3
90% of thrust is produced by the caudal fin.
4
Large span and short chord
5
The moulds for the flexible parts, explained in Sec. 3.2, of both robots are also built with FDM method.
6
The tail mechanism with high mass moment of inertia increases the swinging motion of the robot which is not ideal for an efficient cruising.
8
In order to measure the cruising speed of the robot, the displacement of the centre of mass of the robot, or the centre of buoyancy, is computed.
9
This speed is obtained when the caudal fin and the tail peduncle do not have any inclination and are parallel to the axis of the main body. Otherwise, if the tail steers the motion, the speed of turning goes up.