
Abstract
Robotic swarms that take inspiration from nature are becoming a fascinating topic for multi-robot researchers. The aim is to control a large number of simple robots in order to solve common complex tasks. Due to the hardware complexities and cost of robot platforms, current research in swarm robotics is mostly performed by simulation software. The simulation of large numbers of these robots in robotic swarm applications is extremely complex and often inaccurate due to the poor modelling of external conditions. In this paper, we present the design of a low-cost, open-platform, autonomous micro-robot (Colias) for robotic swarm applications. Colias employs a circular platform with a diameter of 4 cm. It has a maximum speed of 35 cm/s which enables it to be used in swarm scenarios very quickly over large arenas. Long-range infrared modules with an adjustable output power allow the robot to communicate with its direct neighbours at a range of 0.5 cm to 2 m. Colias has been designed as a complete platform with supporting software development tools for robotics education and research. It has been tested in both individual and swarm scenarios, and the observed results demonstrate its feasibility for use as a micro-sized mobile robot and as a low-cost platform for robot swarm applications.
1. Introduction
Autonomous robot swarms [15] represent a fascinating, bio-inspired concept which provides a robust and flexible robotics system by exploiting large numbers of robots. This concept allows for the coordination of simple physical robots in order to cooperatively perform tasks. The decentralized control of robotic swarms can be achieved by providing well-defined interaction rules for each individual robot. These rules are executed continuously in an infinite loop and can provide for suitable collective behaviours in robotic environments [18]. Biological self-organization behaviours provide some of the best examples in setting up a robotic swarm system [16]. The collective behaviour in a group of robots emerges from interactions between simple agents, and so has an indirect relationship with the behaviour of each individual robot. A simple modification of an individual robot's behaviour could result in a significant change in the collective behaviour of the swarm. Therefore, the homogeneity of the robot platform is an important issue in executing robotic swarm scenarios. The platform must be able to imitate swarm behaviours found in nature, such as insects, birds and fish. It should be designed with compact physical dimensions to allow for the study of large- scale swarm behaviour in the lab area. A practical mechatronics design is required to simplify replication and ensure platform homogeneity, as in the standard definition of a robotic swarm system [28].
Several mobile robot platforms have previously been developed in studying swarm applications – these are shown in Table 1. Alice [17] is one such swarm robot built with a very small package size; it has been employed in various swarm research applications, such as the embodiment of cockroach aggregation [19]. The latest version of Alice is equipped with proximity sensors and infrared (IR) remote receivers. It can communicate with its direct neighbour using the IR sensors at short distances. The commercialized Alice was previously around a few hundred pounds. Another micro-robot which has been widely used in swarm robotics is Jasmine [22]. This robot uses six IR sensors to detect obstacles as well as robots in close proximity. Jasmine has played the role of a honeybee in several aggregation (BEECLUST) scenarios [29, 14]. E-puck [26] is one of the most successful robots, being mainly designed for education in the engineering field, and it is equipped with several sensors. However, the commercialized version of the basic e-puck is about £ 580 and an extra £ 300 is needed to obtain an additional range and bearing module [20]. Kilobot [27] is also a robot swarm platform with scalable functions, such as a group charger and programmer. It uses a slip-stick principle for motion which reduces its cost, since the robot does not use motors or wheels. However, the motion method has several drawbacks, such as that the achieved speed is low, which limits its application in swarm scenarios. Its method of motion reduces its use on various surfaces. We previously developed AMiR (Autonomous Miniature Robot) [7] as a low-cost open-hardware platform for swarm applications. It uses IR sensors for distance estimation and short-range communication. Several research applications have been performed with AMiR, including BEECLUST aggregation [3] and the extended version of BEECLUST [6, 11, 10]. Moreover, AMiR is simulated in Player/Stage and was used as the simulated robot swarm platform in [1]. Although the feasibility of AMiR for use in swarm robotics has been demonstrated, its motion is relatively slow and its size does not allow for the use of a large number of robots in a small arena. The limited range of communication is another disadvantage of AMiR which limits the scenarios to short-range coherent behaviours.
Comparison of some swarm robotics platforms

The simulation of large numbers of such robots is extremely complex and the results often do not meet the observed results of what would be exhibited in real robot experiments. Therefore, to imitate the bio-inspired mechanisms of swarm robots and to enable all research groups even with limited funding to perform such research with real robots, the robot platform must have the following criteria: low-cost design, long-term autonomy, long-range communication, bearing, distance and obstacle detection, neighbouring robot detection, fast motion, a small size and an open-source design.
We have developed a new platform to meet these requirements. The design of Colias was considered in terms of these requirements and, due to its small size and fast motion, experiments could be conducted both cost- and time-effectively in a small working area. In comparison to the other mobile robots which are utilized in swarm robotic research, Colias is a low-cost platform (about £ 25) and hence it is feasible for the easy and economic replication of large numbers of robots.
The rest of this paper is organized as follows. In Section 2, we introduce the hardware of the robot. Following that, in Section 3, we explain a swarm algorithm implemented by Colias. In Section 4, we discuss the experimental results of individual and social experiments. Finally, in Section 5, we draw conclusions and discuss the future research directions in which the robot might be involved.
2. Colias Design
In this section, we explain the designed hardware and control mechanism of Colias with regard to individual and social behaviours. Figure 1 shows a Colias robot and its different modules. The robot has two boards – upper and lower – which have different functions. The upper board is for high-level tasks, such as inter-robot communication and user-programmed scenarios; however, the lower board is designed for low-level functions such as power management and motion control.

(Left) Colias mobile robot. a: Upper board processor, b: 2
2.1. Controller
Colias employs two on-board ATMEL AVR micro-controllers in parallel:

Basic architecture of Colias. The robot uses two processors in parallel which monitor all of its functions.
Inter-processor communication is an important issue which affects the speed of processing and its reliability. Therefore, the robot employs two different links between its processors – parallel and serial. In the parallel link, both processors can be defined as a master or as a slave. With serial communication, the robot has three different links, namely, RS-232
1
, I
2.2. Motion
Two micro DC motors employing direct gears and two wheels with a diameter of 2.2 cm actuate Colias with a maximum speed of 35 cm/s. The rotational speed for each motor is controlled individually using a pulse-width modulation (PWM) technique [4]. Each motor is driven separately by a H-bridge DC motor driver and consumes average power of 35 ± 5 mA in no-load conditions and up to 150 ± 20 mA in stall conditions. The robot uses the differential-driven configuration, which is a simple method to control a mobile robot using a very basic motion control principle. Since the motors are directly supplied by the battery of the robot, any changes in battery level will impact the speed of the robot. Therefore, we need to apply the battery level in the kinematic model.
The output voltage of the PWM (

where
The kinematic model of the robot follows general differential-driven kinematics:

which shows that the position estimation of the robot depends upon the speed of the left and right wheels (
As the employed motors' gearbox ratio is high (120:1) and the robot is lightweight (28 g), the robot does not need much torque (
2.3. Sensory System
The basic configuration of Colias uses only IR proximity sensors 4 to avoid obstacles as well as collisions with other robots, and a light sensor to read the illuminance of the ambient light. The IR sensory system consists of two different types of IR module, namely, short-range sensors (bump sensors, see Figure 1d) and long-range sensors (proximity sensors, see Figure 1 e and f). A combination of three short-range sensors and an independent processor grants the capacity for an individual process for obstacle detection which works in parallel with the rest of the system. A similar, although complex, mechanism has been found in locust vision, in which a specific neuron called the ‘lobula giant movement detector’ (LGMD) which reacts to objects approaching the insect's eyes [34].
The long-range system is composed of six IR proximity sensors (each 60
Obstacle detection and distance estimation use the fundamental principles of electromagnetic radiation and its reflections. The reflected IR value that is measured by a sensor is mathematically modelled by the following equation [13]:

where
In addition, the light sensor is placed at the bottom of the robot and is directly connected to both processors –
Furthermore, the serial communication links (explained in the controller section) allow the robot to utilize an extra sensory system, such as camera or ultrasonic modules.
2.4. Inter-robot Communication
In multi-robot experiments, the robots need to utilize a communication media in order to share their information and make collective decisions. Wireless communication is generally used when a scenario is to be accomplished with mobile robots. In this regard, infrared is a suitable choice as an inter-robot communication medium for robotic swarm applications compared with other wireless communication techniques, such as radio frequency. The advantages of using IR in swarm applications include position estimation, neighbouring robot recognition and direct communication, and they can be utilized for obstacle avoidance [9].
Colias translates its IR receivers' values to estimate the distance and bearing of neighbouring robots. The distance of a neighbour can be simply judged by the amplitude of the received IR. Since the robot's receivers are placed apart symmetrically (
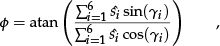
where ϕ is the estimated angular position of the neighbour,
The robot's message must be modulated and transmitted to its direct neighbours. There are several modulation techniques for data transmission. In general, two types of modulation methods are employed in short-range communication, which are: i) amplitude-shift keying (on/off mode), and ii) a mix of pulse and amplitude-shift keying. Figure 3 reveals the modulation methods which can be performed by Colias's communication module. As shown in the diagram, a TxD clock must be connected to a pulse generator with a frequency of
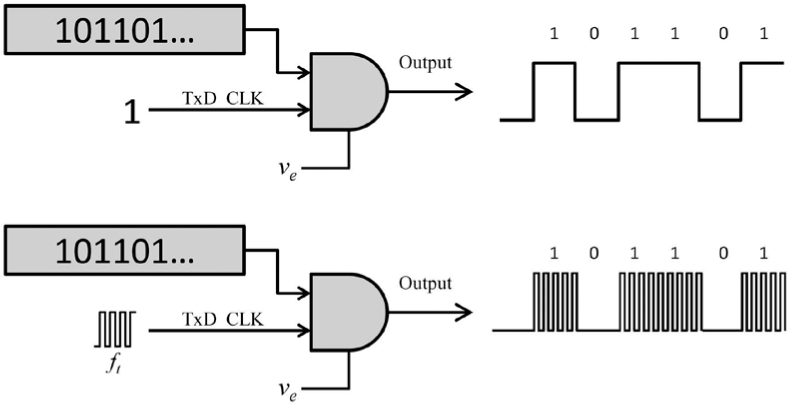
Amplitude-shift keying modulation for message transmission with (a) on/off and (b) pulse/off signals
Each message is formatted to 10 bits length, starting with a one bit preamble of logic ‘1’. The next eight bits are the actual message body [8]. The last bit is reserved for future communication methods between different robots in the case of heterogeneous scenarios. Since the communication messages are too short (10 bits), the robot uses a low data rate of 200 bps (20 messages/sec) for communication in order to increase the reliability of the communication and reduce the error rate.
2.5. Power Management
In swarm robot scenarios, the robot must have sufficient battery power to complete a given task. To achieve long-term autonomy, we need to have a proper power management system to monitor all the functions of the robot during a task and to control the battery charging current during a recharging process such that it increases the battery life. In Colias, the lower board is responsible for managing power consumption as well as the recharging process. The power consumption of the robot with normal motion (in a quiet arena with only walls) and short-range communication (low-power IR emitter) is around 560 mA. However, it can be reduced to about 200 mA when the emitters are turned on only occasionally and the robot moves at a faster speed. A 3.7 V, 600 mAh (extendible up to 1200 mAh) lithium-polymer battery is used as the main power source, which gives autonomy of around three hours for the robot. More battery power is used by IR emitters and decoders when the emitter is turned on continuously. Therefore, the power consumption can be reduced to at least 50% by using pulse modulation in the IR emitters as well as a short data-packet size.
The recharging process of the battery is monitored by an external constant current/constant voltage linear charger IC (LTC4054-4.2). We fixed the charging current to a maximum of 400 mA in order to be able to use USB power to charge the battery.
Moreover, in-scenario recharging techniques, such as a docking charger [30, 12, 33] or movable chargers [5], can be applied to increase the autonomy time in long-term scenarios.
2.6. Firmware and Programming
In order to provide for simple programming and user-friendly robotic implementation, we provide various basic and high-level functions. The utilized swarm behaviours use sensors and received communication values to make a decision. Decisions are made in two different forms which are in programming routines, such as calling a function, and hardware modules, such as controlling motors or transmitting messages.
Microcontroller-based systems are flexible enough to use various programming languages and compilers. There are several types of compilers for AVR microcontrollers, such as assembly, C, Basic and Pascal. GNU [31] Compiler Collection (GCC) is a compiler of a GNU operating system that Colias uses for its programming.
3. Swarm Scenario
We evaluate the feasibility of Colias for use in collective swarm scenarios. In this regard, the state-of-the-art swarm aggregation algorithm (BEECLUST) [29] is implemented with different population sizes. Figure 4 reveals the behaviour of the each robot during the BEECLUST scenario. As can be seen in the diagram, the robots have a simple algorithm to follow. In general, after detecting an obstacle, a robot rotates and executes an obstacle avoidance routine. Alternatively, if the robot detects another robot, it stops and measures the illuminance of the ambient light. It is worth mentioning that a neighbour robot can be detected at a distance of 2 cm, which is called an ‘inter-robot collision’. After each inter-robot collision, the robot waits. The duration spent waiting depends upon the measured illuminance. A higher light illuminance results in a longer stationary time. When the waiting time is over, the robot turns by a random degree and moves forward.

Finite state automaton that shows the robots' behaviour using BEECLUST
BEECLUST has been used in numerous swarm research applications as a bio-inspired aggregation algorithm with different configurations using real robots [22] and simulation software [21]. Mostly, gradient light is employed as the cue for the aggregation [29, 14, 6]. In addition, we previously implemented BEECLUST using a sound source as the cue for the aggregation [11, 10].
3.1. Arena Setup
To implement the scenario, we use a rectangular arena with a size of 95×55 cm. Two circular gradient light spots with a maximum illuminance of 420 lux are defined as the aggregation cues. Since the light sensor is placed at the bottom of the robot, we use a 42″ LCD screen as the ground on which the robots move. The screen enables us to have a dynamic arena which is controlled by a computer. However, we need a small-sized and lightweight robot to implement the experiments on a LCD display. Figure 5 reveals the illuminance of the light in the defined aggregation zones. As can be seen in the light distribution in the arena, the maximum illuminance of the defined cues are slightly different. Therefore, there are two aggregation cues of differing luminance, which helps to test the discrimination ability of the aggregation method between two different sources. We tried to closely simulate the light spots on the screen as the real gradient of the light appears in the space. The aggregation zone is specified as two circular areas marked with drawn circles, as in Figure 11(a).

Sensory readings (illuminance of the light) of a robot placed at the indicated regions

Median of sensor readings from 60 sensors for three power levels of the IR emitters (
We use visual localization software developed by [23] to track the robots during the experiments using a mounted camera on top of the arena.
3.2. Metrics
In this work, two metrics are used: aggregation time and size of the aggregate. We defined two areas as the aggregation zones (zone A and zone B) and set the robots within those zones as the aggregated robots. The aggregation time,
4. Experiments and Results
The developed robot was evaluated during two different phases. During the first phase, we checked the functionality of the hardware of the mobile robot. Therefore, the actuator, sensory system and communication module of the robot were evaluated separately. During the second phase, we deployed Colias in a collective scenario, namely BEECLUST.
4.1. Modelling of Motion
To extract the model parameters (

Median of the rotational speed and the motor's current as functions of the motor voltage
Moreover, the recorded current values from different applied voltages on the motors also displayed a linear increase by increasing the voltage.
4.2. Modelling of Proximity Sensors
As was mentioned in the hardware design section, Colias uses two types of IR sensors, namely: i) short-range proximity sensors (bump sensor) which detect an obstacle or a neighbour at a close distance of 3 ± 0.5 cm, and ii) medium-range sensors (IR proximity sensors) which can detect obstacles and other robots at greater distances. In this section, we present the results from the medium-range proximity sensors. Figure 6 illustrates the median of the captured sensors' readings from 10 robots (60 sensors) in different IR powers (
The model parameters (Eq. 3) are approximated using the captured samples from the sensors at different distances. All the models are solved with high coefficients of determination (
In the case of robot-robot communication, we need to find the distance and relative orientation of any neighbouring robots. Figure 8 presents an example of the sensor readings for a neighbour robot (Robot-B) that is emitting IR in front of the receiver robot (Robot-A). As was expected, the direct sensor (front) receives higher amounts of IR than the neighbouring sensors (front-right and front-left). This phenomenon allows us to model a bearing estimation using the existing sensors.
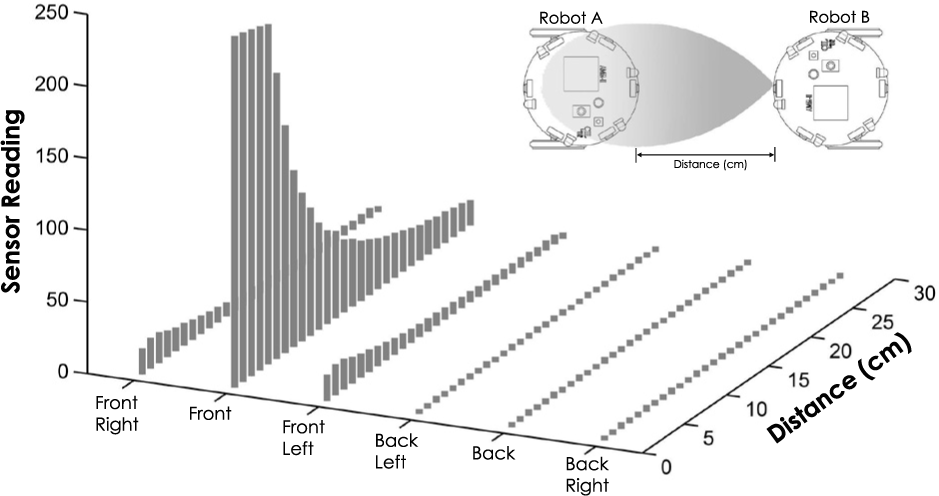
IR sensors reading (with Robot A) from the received IR emitted by a robot in front (Robot B in
4.3. Inter-robot Communication
In another set of experiments, the robot receives IR from its neighbour at different distances and angles. The emitter robot uses

Error rates of distance estimation and bearing as functions of distance
In addition, we tested the short-range and long-range inter-robot communications to calculate the packet error rates. We sent 1,000 packets (messages) and calculated the error rates in the receiver robots using 20 robots at

Inter-robot communication error rate of (a) short-range and (b) long-range communication

A sample run of the BEECLUST aggregation with 14 robots. Zone A is the aggregation zone with high illuminance (maximum illuminance of 420 lux) and Zone B is the low luminance source (maximum illuminance of 170 lux).
4.4. Swarm Scenario
The experiments in the swarm scenario (BEECLUST) were conducted with

(a) Aggregation time as a function of population size (
Based on the observed results of the performed experiments regarding social and individual behaviours, the feasibility of the developed robot for use in swarm scenarios has been demonstrated. Since the robot is designed with a small package size, it would be possible to use large numbers of the robots in real robot scenarios.
5. Conclusion
The development of a new, low-cost (about £ 25), open-hardware platform was presented. The preliminary experiments were performed on hardware components such as actuators and sensory systems. We modelled the motion and sensory system of the robot mathematically and the model parameters were extracted empirically. Therefore, the feasibility of the developed robot as an autonomous platform has been demonstrated. Since Colias is developed for use in swarm robotics research, it played a honeybee role in a bio-inspired scenario called ‘honeybee aggregation’. The results showed that the robot is highly amenable to deployment in collective behaviours. Although the robot has a basic sensory system and supports inter-robot communication, for some complex scenarios which require higher levels of perception we decided to add new features to the robot. For our future work, we are working on an extension of the vision module with a fast ARM processor to implement bio-inspired vision mechanisms.
Footnotes
1
Standard two-wire (RxD: Received Data and TxD: Transmitted Data) communication, also known as EIA-232. We used a TTL voltage level of 0 and 5 V).
2
Inter-integrated Circuit, is a two-wire communication (SDA: Serial Data Line and SCL: Serial Clock) invented by Philips.
3
Serial Peripheral Interface is a synchronous three-wire (MOSI: Master Output & Slave Input, MISO: Master Input & Slave Output and SCLK: Serial Clock generated by master) serial data link invented by Motorola. It is also used for micro-controllers programming.
4
We used infrared emitters and receivers with a wavelength of 900nm <λ< 980nm, to avoid any interference from the lighting system used in our laboratory environment.
6. Acknowledgement
This work is supported by EU FP7-IRSES project EYE2E (269118), LIVCODE (295151) and HAZCEPT (318907).