
Abstract
Robotics provides useful tools for educational purposes, allowing to engage students in learning within disparate domains, from computer science and artificial intelligence – traditionally the main domains for educational robotics – to general education, human and social sciences and arts. Robots can be used with different purposes, from being simple tools to be programmed with some specific behaviour, to being peers with whom to engage in a fruitful interaction for a collaborative learning purpose. In this sense, they can also foster learning of transversal skills such as communication and cooperation. In this article, we propose robot swarms as a novel educational tool to target exactly those transversal skills that are difficult to account otherwise. The usage of multiple robots interacting to solve a common problem can support the learning of concepts related to cooperation and collective actions and can make accessible notions about complex systems that are common in physical, biological, economic and social sciences. Additionally, the possibility to interact and participate in the collective behaviour displayed by the robot swarm can strongly increase the comprehension and engagement with the proposed concept. Motivated by this picture, we propose a roadmap for the utilization of swarm robotics for educational purposes, which is hinged on the Thymio robot, a simple but powerful educational robot that presents all the features required for swarm robotics experimentation. We propose two case studies and we substantiate the proposal with preliminary results from a demonstration of robot swarms performed during a recent robotics festival.
Introduction
Nowadays, robotics has deeply entered our society beyond the industrial and applicative sectors, to the point that robots are proposed as companions for our daily activities, 1 –4 especially for therapeutic and assisted living purposes. 5,6 Educational uses of robots are also widespread. 7 Robots are useful to convey educational messages and support learning in subjects like computer science, artificial intelligence and beyond, including physics, electronics, mechanics, overall bringing robotics closer to formal education. 8,9 Several robotic platforms exist that are used in different educational stages, depending on their hardware and programming complexity. For example, the Khepera 10 or the e-puck robot 11 are platforms mainly used at the university level, whereas for younger students, there exist many robotics construction kits such as LEGO Mindstorms, 12,13 Arduino Robots 14 or KIBO. 15 Other robots have become powerful educational tools, such as the Bee-bot, 16 Finch 17 and Thymio. 18
Although robots are often considered just as entertaining platforms in the educational context, it has been shown that young children perform better when the learning process takes place with the help of a robot. 19 Indeed, pedagogical studies identify large benefits of collaborative over individual learning 20,21 and also positively evaluate the difference in the learning experience of kids when associated with robots with respect to solitary activities, although learning with friends is always preferred. 22 Overall, the general aim of educational robotics is to promote learning and improve educational performance of young students through collaboration and gamification. A robot can cover the role of (i) a tool, (ii) a tutor or (iii) a peer in the learning process, and, in this context, it shows an exceptional ability to attract the students’ attention. According to the different levels of involvement, it is possible to develop teaching activities where robots are passive tools 8 or situations in which robots are more interactive mediators used to improve social interactions and guiding the children through different types of learning experiences. 23 Finally, the robot can be considered as a peer, a companion with an active role in the learning process, 24 giving the opportunity to create interesting coordination and cooperation scenarios, also aiming for learning transversal skills. In this picture, it is worth mentioning also competitions and challenges mediated or in collaboration with robots, which could be considered as an innovative form of assessment-based learning activity. 25,26
To move beyond the current practices and widen the educational potential of robots, we propose here a novel methodological approach hinged on the use of robot swarms. 27,28 Swarm robotics studies groups of robots that exploit self-organization and collaboration to solve tasks that are too complex for an isolated robot, or that require too much time or energy to be faced by single individuals. 29 We believe that robot swarms can bring interesting contributions to the educational area. First of all, concepts like coordination, collaboration and collective actions are not easily explained and understood among children, especially for early/middle childhood (3–11 years old). In this way, domain-general problem-solving skills can be framed and developed in children, a result that would be difficult to obtain otherwise. 30 Indeed, several research studies have shown how students experience various problems during collaboration. 31 –35 For example, Barron. 35 focused on collaborative interactions of primary school children showing a very low level of coordination among group members, especially in problem-solving tasks. Group members did not pay attention to others opinions, interrupted them and rejected alternative suggestions sometimes without reasonable excuses. These behaviours are classified as inappropriate by inhibiting collaborative learning. Popov et al. 32 showed that a lack of collaborative skills might induce communication problems and discourage students from engaging in group work. With regard to Le et al. studies, 31 indeed, their theoretical analysis identifies four different obstacles to collaboration: (1) students lack of collaborative skills, (2) free-riding, (3) competence status and (4) friendship.
Similarly, emergence and complexity are concepts that could be made accessible to teenagers, who can be exposed to situations in which the effects of individual actions on collective outcomes are not easily understood from the mechanistic rules executed by solitary agents and in which phase transitions are readily observable. Hence, robot swarms can lead to the gamification of complex concepts that are common in physical, biological, economic and social sciences, allowing a better appreciation of their meaning and implications for many real-world situations. 36
Besides using robot swarms as passive tools that enact abstract concepts, further educational content can be delivered if robot swarms act as communication mediators to enhance the participation between children in collaborative tasks. The main concept, here, is that robots in a swarm may be seen as model social agents with stereotyped, neutral interactions, which lack all the possible nuances in presentation and interpretation that pertain natural interactions among people. By observing and modulating the ability of robots to communicate and interact with others, children can learn social skills that would be difficult to convey otherwise. Finally, a true collaboration between children and robots in a mixed swarm can be set up, in an immersive human-swarm problem-solving experience that can bring forth novel forms of interactions and group dynamics. The educational potential of such a heterogeneous system is great, considering that children and robots may have access to radically different information and that can support each other in the collective problem-solving activities. If we consider the tendency of children to identify with robots, we can understand the potential of similar methodologies to produce beneficial learning experiences.
To corroborate the above discussion, we present in this article a roadmap for the educational use of robot swarms. We first present and motivate the choice of Thymio as the robotic platform for our experiences. We then describe two case studies we have developed in which a well-known collective behaviour is implemented with a group of Thymio robots, and interactive components are added to convey some educational message. On the one hand, we discuss a collective decision-making problem inspired by house-hunting honeybees. 37,38 On the other hand, we introduce a strictly collaborative task inspired by the classic ‘stick-pulling experiment’. 39,40 Finally, we draw some conclusions in the light of pilot demonstrations performed with kids at the International Robotics Festival held in Pisa in September 2017, 41 which corroborate our proposal with initial indications about the acceptance of Thymio robot swarms as an educational tool.
Thymio as a swarm robot
Thymio is a small mobile robot designed for educational purposes, shown in Figure 1. It appears as a little white box with wheels and features a very neutral look to encourage usage notwithstanding gender or age. 23 It is equipped with several LEGO-compatible fixations to allow construction of extensions and encourage creativity by the children. It supports learning activities, thanks to the high interactivity with the user due to its several sensors and actuators: nine infrared (IR) proximity sensors, a three-axis accelerometer, microphone, temperature sensor, remote control receiver, secure-digital (SD)-card slot, five capacitive buttons, two motors, a loudspeaker and 39 LEDs spread over its body to display internal states as well as the real-time activity of the sensors. By design, the Thymio has several interesting features for educational uses. 9 It has a low price and is open hardware, making it an affordable tool for education in any school. The Thymio comes with a set of pre-programmed behaviours, but it is also possible to easily write user’s code using different programming interfaces (e.g. visual, text-based, graphical blocks) and has been recently integrated with Scratch 42,43 – the most common programming language among children – and Robot Operating System (ROS). 44

The Thymio robot, along with the description of some of its components. For swarm robotics experimentation, the IR transceivers can be exploited to send small messages to neighbours.
All the above features make Thymio an excellent tool for educational purposes. However, the possibility to use it for swarm robotics have not been widely tested. To this end, the most important aspect is the possibility to communicate with other robots to establish collaborations. While not explicitly designed for this purpose, the Thymio features several IR proximity sensors that can be exploited for communication, much as done in several other platforms used for swarm robotics research. 11,45,46 Thanks to this, Thymios can send communication with a small payload and can also detect distance and to some extent the direction of other robots in their vicinity. In particular, the seven horizontal IR distance sensors are used to communicate to other robots by sending a 11-bit value at 10 Hz within a range of about 15 cm. The protocol used to transmit is a differential-Pulse-Position Modulation (PPM), whereas a modified CSMA-CA is used as Network Access protocol. With this setting, it is possible to communicate with up to nine other robots at the same time with negligible interference. Despite very simple and low cost, the Thymio fits perfectly with swarm robotics experimentation, which postulates the emergence of complex self-organizing behaviours from low complexity in terms of rules followed by each individual.
Case studies and perspective educational content
The Thymio’s way to make swarm robotics an educational tool can be delineated through the following case studies we have implemented. For each case, we describe the selected scenario and the rationale behind its choice, and we propose an implementation for the Thymio using the Blockly visual programming interface, 9,47 chosen here because it is commonly used in educational contexts and well represents the event-driven programming approach used by the Thymio robot. Finally, we describe the expected collective behaviour that can be displayed to the pupils and we discuss the educational content we intend to convey with the proposed demonstration. The implementations of the selected demonstrations are made available for usage to the interested users as electronic Supplemental Material (the code is available at https://github.com/ale-vit/ThymioSwarm.git).
Case study I: The house-hunting Thymios
Scenario and rationale
The first case study focuses on a value-sensitive collective decision problem, whereby a group of Thymio robots need to choose the highest value option among a set of available alternatives. The robots start without any information about the quantity and quality of the available alternatives, so that an initial exploration phase is necessary. As soon as alternatives are discovered, they must be reported to the group until consensus is achieved, that is, all robots share the same opinion about the best alternative available. This problem is not trivial considering that (i) robots may not be exposed to all available alternatives, and (ii) there can be situations in which two or more alternatives have the same quality, which may lead to a deadlock state in which no alternative prevails over the others.
The solution we propose is designed after an empirical model of the house-hunting behaviour of honeybees 48 and is implemented following a design pattern for decentralized decision-making in multi-agent systems. 37 Honeybees feature an extraordinary ability in collecting information about the environment, in propagating it within the swarm and in making sophisticated decisions. When searching for a new nest, scout bees identify potential sites, estimate their quality and report what found to the swarm through the waggle dance. In this way, they recruit other scouts that fly out to evaluate the quality of the advertised site. When a sufficient quorum of scout bees is found at one of the sites, the decision process terminates and a second phase of decision implementation begins that leads the swarm to the collectively selected choice. To improve the process speed and solve decision deadlocks, scout bees committed to a given site use a ‘stop signal’ that inhibits bees committed to different sites from recruiting more. 48 Such inhibitory signals are key for the selection of the correct option and allow bees to adaptively switch from a utility-maximization strategy to a greedy choice when the available alternatives present similar qualities. This applies as well to cases in which there are many available nests of variable quality. 49,50
Implementation
Starting from the above ideas and exploiting a design pattern for collective decision-making in decentralized systems based on the honeybees behaviour,
37
we have implemented a demonstration for the Thymio robots, which also includes an interactive part for educational purposes. In our implementation, a group of

The house-hunting Thymios demonstration. Several Thymio–Bees are engaged in the collective decision between the Thymio-Nests placed at the corner of the square arena. A remote controller is used to interact with the Thymio–Bees.
Random walk
Robots move over the arena alternating straight motion and rotation on the spot.
51
The Random Walk routine is shown in Figure 3. During the run, robots move straight for a fixed time, driven by the predefined parameter G

RandomWalk and obstacle avoidance behaviours. The routine RandomWalk alternates the selection between go_forward and turn, according to the internal state RandomWalk_state. A straight motion phase is performed in the go_forward subroutine and the timer period is set to a fixed value (G
Decision-making
The routines leading to collective decision-making are shown in Figure 4. During the random walk, the robots concurrently perform the decision-making process according to their internal state. When a robot is in the uncommitted state, it explores the environment to discover promising nests. When a Thymio–Bee intercepts a Thymio–Nest, the quality

Decision-making subroutine. These routines run in parallel with the environment exploration (i.e. RandomWalk) and include different concurrent processes. They are triggered by an IR-Communication: when a message is received, the subroutine DecisionMaking is invoked and a state transition is performed probabilistically, according to the
Interaction
As shown in Figure 5, there are essentially two possible interactions between users and the Thymio–Bees: via remote control and by pressing the Thymio capacitive buttons. Both the central capacitive button and the remote control can turn on/off the run, meanwhile the remote control permits to set the Thymio–Bees attitude, by toggling attitudeState between collaborative and stubborn. This ultimately corresponds to changing the value of the C

Interaction schema. Both event handlers shown in the figure, that is, center button touched and remote control signal received, permit to start and stop the robot. Furthermore, the remote control allows to set the attitude of the Thymio–Bees, by making them collaborative or stubborn.
Expected collective behaviour
The collective decision-making algorithm implemented here has been thoroughly studied both theoretically and in applied contexts.
37,38,49,50,52
The dynamics of the decision-making process are determined by the number and quality of available alternatives (e.g. the number M of Thymio–Nests) and by the parameters of the individual behaviour introduced above. Here, we adopt a parameterization discussed by Reina et al.,
37
in which robots never abandon spontaneously their commitment and can therefore change alternative only as a result of cross-inhibition among robots committed to different options. In such conditions, it is guaranteed that the process will lead to consensus for the one or the other option, because consensus is the only absorbing state for the stochastic decision-making process: once all robots share the same option, there is no possibility to change it because there is no further possibility for cross-inhibition. However, the time required to arrive at consensus may largely vary, both as a function of the number and quality of the available options,
49,50
and as a result of spatial factors that determine the way in which robots interact and share information. In our experience, the time to consensus never exceeded few minutes even in the most difficult condition with multiple equal alternatives. The small size of the group used in our educational context (here,
Educational content
The way in which honeybees arrive at consensus is an excellent example of collective decisions in large-scale decentralized systems and proposes an interesting perspective to understand how informed group decisions can be made, despite the bounded rationality of the involved agents. Since collective decision-making is a widespread phenomenon involving animal societies and humans in diverse social settings, it is important to convey a principled understanding of the dynamics underlying the emergence of consensus. In this sense, robot swarms represent a great educational tool, as the pupils can observe the way in which consensus is achieved through the spreading of information and the ability of Thymio–Bees to change opinion (as displayed through their colour) until consensus is achieved. The opportunity to find out how a group can choose an optimal choice as a whole, starting from different opinions collected by members, is an instructive example to discover principles of collective intelligence. Aspects like spatial heterogeneities and creation of clusters of consensus are also contained in the demonstration, allowing teachers to show how polarized minorities can be formed and resist to the invasion of alternative opinions.
At the beginning of the activity and before the decision-making process starts, kids can interact with the Thymio–Bee deciding the quality of the Thymio–Nests. Hence, they can choose to have an easy problem (one clearly superior Thymio–Nest and other inferior ones) or a tough one (many Thymio–Nests with high quality). As discussed, the initial setting will affect the convergence speed and outcome of the dynamic process, making it possible to appreciate the relationship between option quality and final outcome, as well as the effects of random interactions among the robots. Additionally, during the consensus process, kids can modify the quality of Thymio–Nests, an event that can be recognized by the robots interacting with the Thymio–Nests and that will alter the final outcome of the decision-making process (e.g. decreasing the quality of an initially good Thymio–Nest will lead to more Thymio–Bees switching to other alternatives).
Thanks to the user-interaction shown in Figure 5, pupils can engage with the collective decision-making process by controlling the attitude of the Thymio–Bees. In particular, when the attitude is set to ‘stubborn’, the Thymio–Bees can share their opinion but are not able to change their mind, so that consensus is very unlikely. Conversely, with the ‘collaborative’ attitude, Thymio–Bees can revise their choices following the interaction with others, a process that supports the circulation of opinions within the group, eventually leading to global consensus. Overall, kids can be exposed to the importance of openly listening to others and of evaluating different alternatives to reach consensus. Although we currently limit interactions to just two different attitudes, a more fine-grained variability of the attitude is possible, leading to a finer control of the system parameters and to the experimentation of a variety of different outcomes. For instance, the formation of localized cluster of consensus could be experienced by setting discovery and recruitment to the maximum value and setting a low non-null value for the cross inhibition rate. This will lead the process to slowly proceed to consensus starting from local cluster created around the Thymio–Nests. This is an instructive example of how further educational messages can be conveyed by tuning the demonstration at will.
Finally, the demonstration presented here can be easily extended in a completely interactive way, giving kids the possibility to decide which is the better option to be chosen in collaboration with the robots. Here, the difficulty of the decision-making problem can be varied at will by changing the qualities of the Thymio–Nests, making less evident the existence of a superior option. Kids can engage in the decision problem together with robots and the way in which the robot group leans towards the one or the other option can provide a cue that children can use to solve the problem. At the same time, children can find strategies to interact with robots by changing their attitude based on their own perception of the problem (e.g. by making them more collaborative if they are leaning towards a seemingly wrong option or the other way round). In this way, they can try to maximize the probability of success by taking an active part in the collective decision process.
Case study II: The stick-pulling Thymios
Scenario and rationale
The second case study represents a strictly collaborative task, that is, a task that can be solved only if an effective collaboration by two (or more) robots takes place. In its original formulation – which also gave the name to the experiment 39 – a group of robots had to collaborate to extract a long stick that was put into the ground. However, due to physical constraints in the manipulation abilities, a solitary robot could not release the stick unless a second robot would help in pulling it out from its placement. The problem is particularly challenging if there are many sticks to be pulled and few robots available. In this condition, a simple and effective strategy is to lift a stick every time it is found and wait until another robot arrives to finish the stick-pulling task or until a timeout expires. The waiting time is the crucial control parameter: wait too short and not enough time is allotted for other robots to arrive and collaborate; wait too long and most of the time will be wasted waiting for other robots that are waiting at the same time for a collaboration elsewhere. The correct trade-off must be found to maximize the collaboration rate, and this depends on several spatial and task-related parameters making a correct estimation very difficult.
The strictly collaborative feature of the problem requires the simultaneous presence of more than one robot at a given collaboration site, making it possible to abstract the task from pulling sticks while preserving the essentials of the problem. For instance, the collaboration could entail recognizing that two or more robots are simultaneously present at a given site, represented by a beacon to be switched off. 40 Following this idea, we propose a simple implementation that makes use of the Thymio robots in a passive or interactive way.
Implementation
We propose that a Thymio–Beacon plays the role of the collaboration site, so that it can actively monitor for the presence of a sufficient number of Thymio–Workers around it for an effective collaboration to take place. When this happens, the Thymio–Beacon would turn green and a success scored. Thymio–Workers have a simple behaviour: they search for Thymio–Beacons and wait for a given time before resuming search. The following behaviours are sufficient for the implementation.
Beacon
Thymio–Beacons wait for collaborations in a fixed position, by acknowledging messages received by Thymio–Workers until two different robots send a message within timeout milliseconds (see Figure 6). In this case, the Thymio–Beacons sends a special success message to communicate the effective collaboration. After that, the Thymio–Beacon does not become active anymore.

Stick-pulling beacon. The routine of a Thymio–Beacon is triggered by the IR-Communication. When the first message arrives, the Thymio–Beacon switches in a W
Random walk
The random walk represents the default behaviour for the Thymio–Workers and is implemented exactly as in Figure 3, without any difference.
Wait for collaboration
Thymio–Workers explore the environment to search for Thymio–Beacons. While moving, they broadcast their own ID to establish an interaction with a Thymio–Beacon. As detailed in Figure 7, when a Thymio–Worker receives an acknowledgment (i.e. a message containing its own ID), it stops and switches to the W

Worker. The default behaviour of a Thymio–Worker is a random walk, and state changes are triggered by the IR-Communication. If an acknowledgment arrives to the broadcasted message containing the robot ID, the robot stops walking and communicating. This implies that a successful interaction was established with a Thymio–Beacon. Thus, the Thymio–Worker switches to the Wait state, expecting a S
User interaction
As shown in Figure 8, the remote control enables to increase or decrease the value of the T

Interaction schema for the Stick-pulling Thymios. The interactive module allows the user to increase/decrease the length of the T
Expected collective behaviour
The proposed implementation results in a variety of different outcomes on the basis of two fundamental parameters (39; 54). First of all, the ratio β between Thymio–Workers and Thymio–Beacons must be sufficiently low for interesting behaviours to be observable. A trivial behaviour is sufficient when there are more workers than beacons (
For educational purposes, the T
Educational content
Strictly collaborative tasks are excellent means to teach the importance of correctly balancing the individual behaviour and adapt to others. Also in this case, robots can be depicted as having different moods while performing their collaborative task. The robot that waits too little can be thought as being impatient and will not be able to set up many collaborations because it will move too much between different places. Conversely, the robot that waits too long can be thought as being stubborn and will not be useful if paired with other stubborn robots (we assume that robots are homogeneous here). Hence, a balance between being impatient and stubborn must be found, to be collaborative. By varying the initial setup, it is possible to showcase a variety of situations to demonstrate how the different attitudes of the robots impact on the efficiency of the group. In this way, children can learn that collaborations are not easily made without some predisposition to wait for others and some flexibility in the own behaviour.
Additionally, thanks to the interactive component, children can be engaged to participate in the game and define what is the length of the timeout (or the level of patience vs. stubbornness of their robots). In this way, they can directly experience what is the effect of different trade-offs to have robots interact properly and observe through the actions of the Thymio robots their efficiency in setting up collaborations. After several adjustments of the timeout, it can be observed how the collaboration rate changes and can relate this with the ability to balance the own attitude with the one of others. With little more complexity, the demonstration could be extended to engage children in a one to one interaction with robots, having the possibility to form heterogeneous groups and hence observe how different attitudes (in terms of patience and stubbornness) best fit with the given task.
Acceptance of robot swarms as an educational tool
The two case studies presented above are representative of many possibilities and educational opportunities offered by Thymio and by swarm robotics. What remains to be ascertained and deeply studied is the reaction of children to an educational use of robot swarms. To start with, we evaluated the acceptance of robot swarms as an educational tool during a pilot demonstration within the context of the International Robotics Festival held in Pisa in 2017. On 10th September, two robotics labs have been organized in Pisa involving 32 children in the range 6–14 years old. The robotic lab included a presentation of the Thymio robot and a coding module in which kids learned to program the Thymio for basic tasks (mainly responding to the pressure of the directional capacitive buttons to execute a move). Then, we proposed the house-hunting Thymio demonstration, and we also engaged the children in a collective decision challenge loosely inspired from the demo. After that, we collected the opinion of the participants on the game and on the demonstration in a short anonymous questionnaire.
The house-hunting Thymios demonstration has been administered multiple times but without children directly interacting with the robots, apart from deciding the quality of the Thymio–Nests before running the demo, in some cases. We have however shown the two different attitudes for the Thymio–Bees, setting them either as stubborn or as collaborative, and showing that the latter were better suited to achieve consensus.
Then, children have been engaged in a collective decision, whereby four kids formed teams and took turns to control a Thymio robot – by pressing on the directional capacitive buttons on top of the robot – and drive it towards one of the four different final rewards (chocolate or different candies, see Figure 9). Each command makes the Thymio move a small step forward/backward or slightly turn left/right. To make the game more challenging, the Thymio responds with the opposite move to the one imparted. To reach one of the rewards, the team must agree on the direction to take only by controlling the Thymio, as talking or pointing was forbidden. Given that every member of the team receives the same final reward, a consensus must be silently reached, and children had to trade their individual preference for success and decision speed. Indeed, different teams were also competing for being the fastest over a couple of runs. Ultimately, children faced a consensus problem that was in some way similar to the one of the Thymio–Bees. Children have preferences that are not disclosed, and, even if they see the full range of available candies, they need to conceal their preference with those of the other teammates, otherwise the Thymio would not reach any target stuck in a deadlock between orienting towards one or the other candy. Children interact only through the Thymio, and they can reinforce the choice made by other teammates or inhibit it making a counter move. The collective decision unfolds through these interactions until a target is reached.

The Thymio and the rewards in the collective decision challenge.
To understand how children reacted to the demo and the game, we administered a questionnaire containing the following questions:
1. Did you like the demo and the game?
[Yes, No]
2. Have you understood the rules of the game?
[Not at all, Slightly, Enough, Very]
3. What makes a group successful?
[Speed, Flexibility, Accuracy]
4. How are bees compared to humans in making decisions?
[Poor, Mediocre, Good, Better]
5. What is more important to take a decision?
[Convince others, Change opinion, Be quick]
6. Are there similarities between demo and game?
[Yes, No]
The results from this survey are shown in Figure 10. The participants largely appreciated the game and the demonstration, and they rated it as a very entertaining activity. They also demonstrated a good understanding of the rules of the game they were engaged in, which confirms the quality of the obtained results. When it comes to the understanding of the most important aspects of collective decisions, most kids understood that flexibility is the most important quality to quickly reach consensus, while avoiding mistakes (‘Accuracy’) and moving fast (‘Speed’) are less important aspects. The demonstration conveyed a good appreciation of the ability of Thymio–Bees to reach consensus, as they are rated in general better than humans in taking decisions. To achieve that, the most important feature is considered to change opinion, followed by the ability to convince the others and only a couple answered that speed is important. Finally, a large majority of the participants found that there was a strong similarity between the house-hunting Thymios demonstration and the game.
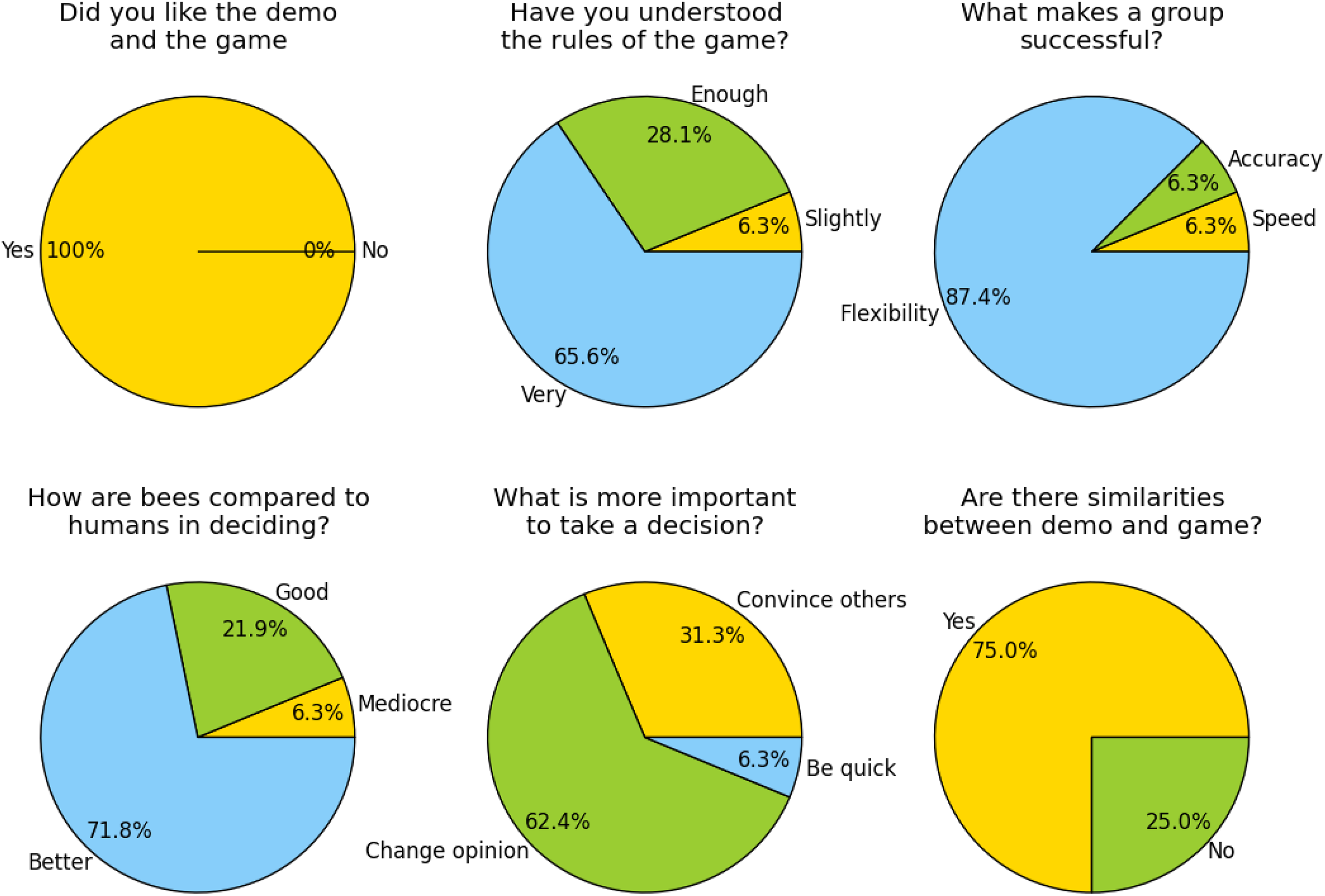
Results on the survey conducted with the children that took part at the demonstration within the International Robotics Festival. Number of valid subjects
Despite the demonstration and the survey were conducted in rather informal conditions, several important educational messages were successfully conveyed. Kids understood that cooperation and consensus are not easy to achieve, and that some flexibility in the own opinion is a necessary condition. They demonstrated knowledge about the biological functioning of bees and also considered the insect colony as very well-organized social system. Overall, we can conclude that the acceptance of the Thymio swarm has been considerable, and the educational message of the demonstration was properly conveyed, confirming that swarm robotics can be considered a very promising tool for pedagogical purposes.
Conclusions
We have proposed motivations and a roadmap for the usage of robot swarms in an educational context. We believe that the demonstration we propose can be very useful for teachers and interesting to students. The educational content can be modulated and changed at will, and it can be delivered to both small and large groups of student with no effort, with unaltered learning outcome. Indeed, when demonstrations are not interactive, they can be delivered to as many pupils as they comfortably fit around a table. Interactive demonstrations are bound to a single remote controller that broadcasts messages to the whole group. Multiple remote controllers can be used, provided that their behaviour is carefully programmed to avoid interferences, letting users control different subgroups of robots. In this way, the possibility to exploit swarm robotics for educational purposes is largely enhanced, and many more demonstrations can be imagined owing to the large body of literature on robot swarms. 27,29
The results of the first pilot we conducted are very promising. Future work can positively start from this preliminary results to implement the roadmap proposed in this article and improve it with additional interaction modalities between kids and robot swarms. To this end, further experiments in controlled field conditions are required to test the power of swarms in conveying desired educational messages. To make swarm robotics a useful educational tool, it is also necessary to overcome the expected reluctance from teachers and educators in dealing with a complex system made by multiple interacting robots. In this respect, Thymio looks like a very promising tool, thanks to its versatility and user-friendliness. Swarm robotics demonstrations and educational packages must however be very well conceived, so as to tame their intrinsic complexity and maximize their educational potential. The demonstrations proposed in this article suggest that the swarm behaviour should be easily tuneable by adjusting only one or few parameters, and that children should be engaged in a continuous interaction with the swarm allowing them to change the collective dynamics and experience in first person what does it really means to think collectively.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.