
Abstract
Abstract While sailing near the sea surface, submarines will often undergo rolling motion caused by wave disturbance. Fierce rolling motion seriously affects their normal operation and even threatens their security. We propose a new control method for roll stabilization. This paper studies hybrid intelligent control combining a fuzzy control, a neural network and extension control technology. Every control strategy can achieve the ideal control effect within the scope of its effective control. The neuro-fuzzy control strategy is used to improve the robustness of the controller. The speed control strategy and the course control strategy are conducted to extend the control range. The paper also proposes the design of the controller and carries out the simulation experiment in different sea conditions. The simulation results show that the control method proposed can indeed effectively improve the control performance of submarine stabilization.
1. Introduction
With increasing demand in oceanographic engineering and military fields, more submarines are required to perform tasks near the sea surface. Affected by the strong wind, waves and currents, these submarines will undergo lots of rolling, pitching and heaving motions, which seriously affect their normal operations, especially the rolling motion, posing a great threat to the security.
Submarine stabilization is preferably accomplished by means of a plurality of rudders at the trailing edge of the sail. The submarine will produce a large roll motion near the water's surface due to the impact of waves, which seriously affects its normal operation. Large amplitude rolling can easily lead to capsizing, which will cause the loss of life and property. Therefore, the control of rolling motion is important in anti-rolling and anti-overturn research.
There are several active anti-roll devices, including fin stabilizers [1], rudder roll stabilizers [2] and activated tanks [3]. Rudder roll stabilizers (RRS) are relatively inexpensive compared to roll damping fins, have approximately the same effectiveness and cause no drag or underwater noise if the system is turned off. Many papers introduce the results of different control and modelling methods for roll damping [4, 5, 6, 7]. The linear designed model is established for rolling, sway and yaw motion in [8, 9] and a kind of sliding mode controller for roll stabilizing is proposed in [10, 11, 12]. Such control solves the problems that the constraints caused by the nonlinear steering gear and the maximum rotation rate and amplitude of rudder motion. [13] adopts H∞ control theory to design the rudder anti-rolling controller and improve the robustness of the system. After much research on rolling control, it is found that the uncertainness of the submarine model has a great influence on the effect of anti-rolling, which would lead to a decline, or even failure, in the anti-rolling efficiency of the traditional anti-rolling control relying on the accurate model. As a result, the research on the rolling control has developed in the direction of intelligent control in recent years. [14, 15, 16] apply neural network control to a design for rudder anti-rolling and [17, 18] use the fuzzy control for rudder anti-rolling. The intelligent control technologies are gradually used in roll control since intelligent control technology requires no mathematical models and the systems have good robustness.
Fuzzy control is an effective way to solve uncertain system control problems and due to the strong robustness, the impact is greatly weakened on the control effect by the disturbances and parameter changes. The neural network has a strong ability for self-learning and fault tolerance. The learning mechanism of the neural network is introduced into the fuzzy control system and the fuzzy information is taken to train the neural network, which makes the system develop in the direction of self-adapting, self-organizing and self-learning.
A new concept of extension control was proposed in [19], where the basic idea was to solve control problems from the aspect of information transformation. In other words, to transform the control information into an eligible value range by using a dependent degree. By now, extension control is a kind of new intelligent control and has been adopted in many research fields [20, 21]. Fuzzy control is an effective approach to resolve the control problem of uncertainty in the system. Extension control is characterized by solving incompatibility during the control process. Fuzzy control is good at resolving the uncertainties in quantitative change and gradual change, while extension control is applicable for dealing with the uncertainties of qualitative change and non-gradual change during the control process. Considering there are uncertainties in gradual change and quantitative change resulting from the change of ship model parameters in the roll control system and there are also the unforeseeable uncertainties of non-gradual change arising from waves. Each intelligent control method has its own advantages and features, but also has certain limitations. This paper proposes a hybrid intelligent control strategy for rudder roll stamping and an anti-capsizing system. The combination of three intelligent control methods solves the complex, highly non-linear and uncertain ship control problems.
2. The model of submarine
The typical geometry for a submarine is a streamlined shape with an axially mounted propeller. Manoeuvring a submarine is achieved by adjusting the propeller, bowplanes, sternplanes and rudder. The six degree-of freedom (DOF) model is illustrated in Figure 1. The six DOF system possesses three translational motions and three rotational motions. Usually, the motions are nonlinear and strongly coupled. Various strategies have been devised for distributing the responsibility for the control of each motion between the various control devices. Two coordinate systems are adopted to describe the motion of the vehicle in six DOF. In the body-fixed frame, the linear and angular speeds of the vehicle are denoted as u, v, w (surge, sway and heave) and p, q, r (roll, pitch and yaw). In the earth-fixed frame, the positions and Euler angles of the vehicle are denoted as x, y, z and ϕ,θ,ψ. The relationship between the linear and angular speeds in the two frames is given by:
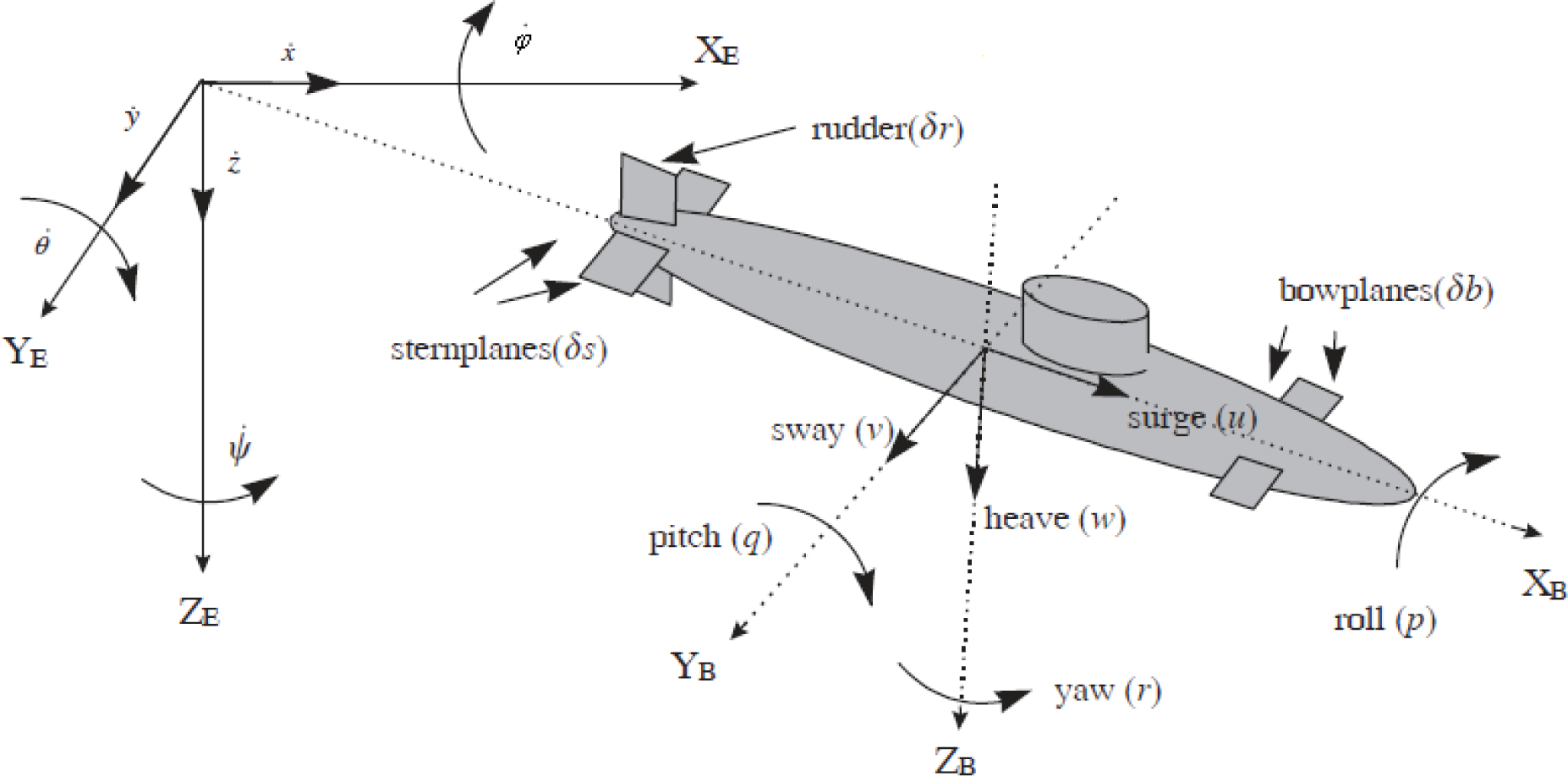
The six degree-of-freedom model of submarine

where c1 = cosϕ, s1 = sinϕ, c2=cosθ, s2=sinθ, c3=cosψ, s3=sinψ, t2=tanθ. The control inputs, denoted by T,δr,δs, are produced by the propeller and deflections of the rudder and stem-planes, respectively. Standard submarine equations of motion [22] are applied to describe the motion of the vehicle as it has the shape of a torpedo.
3. Hybrid Intelligent Control for Submarine Stabilization
3.1 Submarine Motion Control System
This paper proposes a composite control strategy for submarine rudder roll damping and anti-capsizing control. Different control strategies are adopted in different measurement modes. Rudder roll stamping control is required to reduce the roll angle. When the roll angle exceeds a safe range quickly at high wave levels, speed control and course control are employed to reduce the roll angle into the effective control range of rudder roll stabilization control.
The input value of the roll controller is the roll angle ϕ and roll rate p. The output is divided into three kinds of values according to different situations, which are, respectively, rudder angle δ ϕ for rudder roll stamping control, speed U and direction command ψ ϕ for anti-capsizing control. the submarine motion control system is shown in Figure 2.

Submarine motion control system
3.2 Structure of Roll Controller Based on Extension Control
A roll controller design based on extension control is proposed in this paper. The extension control strategy includes character identification, correlation functions calculation, measurement pattern identification, inference mechanisms and a control strategy, as shown in Figure 3.

Structure of roll controller based extension control
In the roll control system, the controller should eliminate the influence of waves and reduce the rolling angle ϕ. This design takes ϕ and p as characteristics values to constitute the characteristic plane so as to determine the operation state of the system.
Correlation functions are used to describe quantitative and qualitative changes. Correlation is the change in controlled information in the controlling process. To establish correlation functions, the controlling domain has to be determined first. The establishment extension set of characteristic value ϕ and p is shown in Figure 4.

The extension set of character status
From Figure 4, it can be seen that the status distance D0 of the classic domain, the status distance DM of the extension domain and the status distance DS of a random point on the coordinate plane can be represented by the following equations. This defines the distance from a random point on the coordinate plane to the original point on the coordinate plane and is called the status distance, written as D.

The value selection of the classical domain and the extension domain is connected with the stability of the submarines; the calculation of the stability of the submarines is connected with different types of submarines and conditions of loading. The classical domain range parameters ϕom and pom and the extension domain range parameters ϕm and pm stem from expert domain knowledge and prior knowledge of the controlled process. The control goal is to reduce submarine swaying caused by ocean currents. The rudder roll stabilization controller is adopted to reduce the rolling angle in the classical domain. When the submarine's roll angle and roll rate are not good, for example with a rolling angle ϕ less than 10 and a rolling angle velocity p less than 8, the rudder roll stabilization controller can reduce rolling. If the interference is too big, that is, the rolling angle ϕ and the roll rate continue increasing and reach the extension domain range, the rudder roll stabilization controller will not be able to control the rolling to the safe range, due to the limited anti-rolling efficiency. Speed control and course control are adopted to reduce the roll angle to the classical domain range. When the speed is high, the anti-rolling control of the rolling stabilization controller is most efficient, whereas the anti-rolling effect is reduced when the speed is low. Therefore, by adjusting the speed, the control of the rudder roll stabilization controller can be largely improved and the control range is expanded. For example, the parameters are set according to the reference [23] as following: ϕom =10°, ϕm =20°, pom =8 °/s and pm = 16°/s. S0 (0,0) is the origin on characteristic plane ϕ – p. The correlation function of any point S (ϕ, p) is as follows:

The system is divided into the following three measurement models: the correlation function of the system characteristic state in the classical domain K(S) ≥ 0, the correlation function of the system characteristic state −1 ≤ K(S) ≤ 0 in the extension domain and the correlation function of the system characteristic state K(S) ≤ −1 in the unordered domain.
Measurement mode M1 = {S| K(S) ≥ 0} means that system characteristic state belongs to the classical domain. M2={S| −1 ≤ K(S) < 0} means that the system characteristic state belongs to the extension domain and this domain is divided into two sub-measurement models:
This design selects β1 = −0.5 and M3 ={S|K(S) <-1}, which means the system characteristic state belongs to the unordered domain. When the wave disturbance is insignificant the characteristic quantities, including roll angle and roll rate, are small and the value of the system characteristic state is within the classic domain range the measurement mode is classified as M1. When the wave disturbance is significant and the roll angle and roll rate are big and the value range of the system characteristic state is within the extension domain range, represented by changing the value of the manipulated variable, the characteristic state can be transformed into the range of meeting the control requirements (that is transformed into the classical domain). Two extension sub-domains are measurement mode M21 and measurement mode M22. If the wave disturbance is too significant, the value of the system characteristic state is beyond the extensive domain range. Consequently, none of the three types of control method is able to effectively keep the submarine controlled and stabilized. The warning alarm will be therefore raised.
The inference mechanism is the transition from measurement mode to control mode. the rules of inference can be manifested in the system: IF (measurement mode) and THEN (control mode). When the system is in measurement mode M1, the rudder roll damping control strategy is adopted to output the rudder roll damping order. When the system is in measurement mode M2, the target is changed based on the idea of extension change, speed control strategy is adopted in sub-measurement mode M21 and direction control strategy is adapted in sub-measurement mode M22 in the extension domain. When the system is in measurement mode M3, the system gives out an anti-capsizing alarm and the pilot has to conduct human emergency control.
Control Strategies will exert their control function from three aspects. The roll controller is capable of reducing the large swaying of submarines generated by storm waves, so as to prevent the overturning of submarines. Control outputs are calculated using control methods for each control mode. There are three types of control mode outputs for the anti-rolling controller: the rudder angle δ ϕ , speed control U and course control ψϕ. The inference rules are as follows:
IF measurement mode M1 THEN control mode u1 = δϕ.
IF measurement mode M21 THEN control mode u2 = U.
IF measurement mode M22 THEN control mode u3 = ψϕ.
When the characteristic status of the system belongs to the measurement mode M1, the rudder roll control strategy is chosen. It will output an appropriate rudder order δ ϕ to reduce rolling. When the rolling angle is too big, the controller will not be able to steer the rolling into a safe sphere in time. When the characteristic status of the system belongs to the measurement mode M21, the speed control is increased under sub-measurement mode M21 in the extension domain. The submarine speed is closed related with the efficiency of the roll damping controller. If the large amplitude rolling is caused by resonant movement, then the resonant movement can be avoided by adjusting the speed of submarines. It will output speed U to reduce rolling. However, if submarines travel in beam sea, the beam sea is very likely to cause the submarines to sway violently and even overthrow the submarines. Adjustment of submarine speed in order to avoid resonant movement would be in vain at this point. When the characteristic status of the system belongs to the measurement mode M22, an anti-capsizing course control strategy should be adopted, which will output direction order ψϕ. By changing the direction, the roll angle amplitude could be brought under a safe sphere. When the characteristic status of the system belongs to the measurement mode M3, the system sends out the capsizing warning and the pilot conducts manual emergency control accordingly.
The database stores parameters of the controller process, process output values, handled mediated data and other empirical parameters, such as the classical domain sphere, the extension domain sphere and characteristics mode classification.
The submarine roll control system is an intelligence control system, which integrates operators, machines and submarines. The human-machine interface is the medium for delivering and exchange of messages and communication interface between the navigating mate and the computer control system. It manly includes functions such as direction control and inspection, transfer, parameter setting of anti-capsizing control and order input by the navigating mate.
3.3 Hybrid Intelligent Control Strategies
3.3.1 Neuro-fuzzy control for Rudder Roll Stabilization
Neuro-fuzzy control was used to achieve rudder roll stabilization in this design. The fuzzy inference system of Takagi-Sugeno model was established. The T-S fuzzy model is particularly suitable for fuzzy modelling of an uncertain system. Figure 5 shows the topological structure of a neuro-fuzzy controller for submarine rudder stabilization. In a double-input single-output neuro-fuzzy control system, Takagi-Sugeno type inference rules were cited and the universe of discourse of the input variables roll angle ϕ and angular roll velocity p = ϕ were fuzzy sets with seven subintervals.

Structure of Neuro-fuzzy controller for RRS
The control rule layer represented the control rule of the controller. It was used for the implementation of antecedent matching of fuzzy control rule. 49 rules of Sugeno-type inference were designed in this system, such as:
If ϕ is NB and p is NB, then

where ai, bi and ci were consequent parameters in Equation (5).
The output language layer represented the linguistic value of the output linguistic variable. The output variable was rudder roll stabilization order δϕ. Each neural node represented a member submarine function. Each output member submarine function was a first-order Sugeno linear function. The antecedent part of the Sugeno-type fuzzy rule was fuzzy quantity while the consequent part was the exact amount. The output was the linear combination of various input variables.
The output variable layer represented the output variables of the controller. Neurons played the role of defuzzication. The output of the entire ANFIS was expressed as follows:

The excitation intensity ωi of each rule in Equation (6) was calculated as an implicational relationship.
It could be seen from the relationship between the input and the output of the network that the neural network was a self-adapting network equivalent to Sugeno model functionally. The optimization of the controller could be achieved through the adjustment of the antecedent and consequent parameters of the neuro-fuzzy controller.
The optimization of the neuro-fuzzy controller of rudder stabilization was to seek and adjust the parameters of neuro-fuzzy the controller through the application of a neural network learning technique. The antecedent parameters {ci, σi}and the consequent parameters {ai, bi, ci}of the neuro-fuzzy controller of the automatic rudder on submarines should be optimized through a learning algorithm. In this design, a Hybrid Learning Rule proposed by Jang [24] was adopted in the training of controller parameters. The BP algorithm was applied to the learning of antecedent parameters, while a least square method (LSE) was applied to that of consequent parameters.
The learning process could be divided into forward dissemination and backward dissemination. In forward dissemination, the signal was disseminated to the fourth layer and consequent parameters {ai, bi, ci} were determined by LSE. In backward dissemination, the error variation rate was disseminated from back to front and antecedent parameters of the rule {ci, σi} were adjusted with the BP algorithm. The shape of the membership function was changed until the least square of the entire sample set met the precision requirement.
Two input variables of the neuro-fuzzy control system of automatic rudder included seven fuzzy subsets, constituting 49 rules of Takagi-Sugeno type inference. In the system, a total of 28 antecedent parameters and 147 consequent parameters required optimization. The algorithm of the neuro-fuzzy controller included learning antecedent parameters and learning consequent parameters.
The back propagation (BP) algorithm was applied for the learning of antecedent parameters to adjust antecedent parameters {ci, σi} within every sampling cycle. From the set course ψr (k), the expected movement trajectory was formed and the difference E(k) composed the index of closed loop control performance according to Equation (8).


The essence of the BP algorithm was to reverse the error signal of the output layer of the neural network to each node of the second layer, where the antecedent parameters were located using a chain method derived with composite function to obtain the gradient signal. In this manner, the updated quantity of the parameter could be acquired.




Learning rate η could be calculated with Equation (13):

where k1 was the initial step length; α was antecedent parameter set α = {ci, σi} affecting index E(k).
The least square (LS) method was adopted for learning consequent parameters pi, qi and ri(i=1˜49) and the expression for the output part of each rule was as follows:

where:

λ ∈ R1×N was the vector of the data row and

θ ∈ RN×1 was the vector of the data row.
Each data pair {ϕ(k), p(k) and δd (k)}(k=1,2, …, p) in the data set was substituted into the above expression:

where U ∈ Rp and the vector were calculated according to input ϕk and pk (k=1,2, …, m). ϕ ∈ Rm×49 was the data matrix:
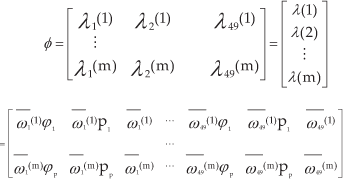
ωi(k) in Equation (18) referred to the per-unit weighting coefficient for different output δk. The input at sampling time K was used to calculate these weighting coefficients. The input of sampled data was substituted into the left of Equation (19).:

The error vector was defined as follows:

where error at time K was as follows:

The square sum of ε(k) was taken as the performance index of data fitting Equation (22).

The estimation of parameter θ should minimize J(θ). Thus, the least square optimization result about θ was obtained as follows:


where k=0,1, …, p-1. Actually, S(k) was the covariance matrix of the parameter estimation error.
The membership function and the fuzzy control rule of rudder roll stabilization were optimized using the learning function of the neural network. The control algorithm procedure shown in Figure 6 is used to simulate the neuro-fuzzy controller.

The control algorithm flow chart
The antecedent parameter is the centre and width parameter of the Gaussian membership function used in the second layer of the neuro-fuzzy controller and through the optimization algorithm the membership function is corrected. The fuzzy membership function of roll angle and roll rate are shown in Figure 7.
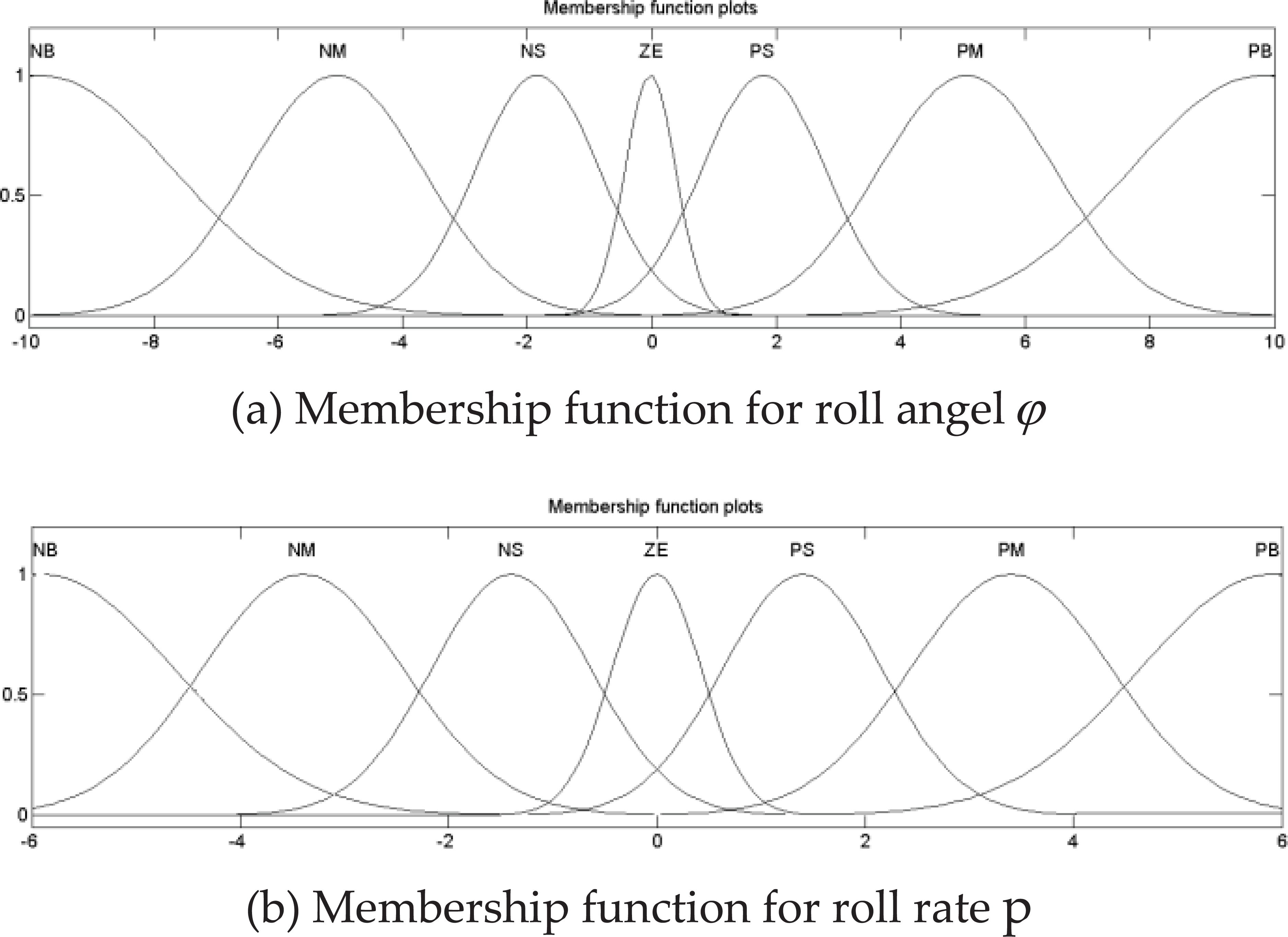
The optimized membership function for input variables
In the following section, simulation research was used to investigate the stabilization performance of the self-adapting neuro-fuzzy controller with rudder roll stabilization designed in this study in different sea conditions, at different speeds and with different wave-to-course angles.
The consequent learning, which was accomplished within each sampling cycle and was realized when the network forward calculation reached the fifth layer, was an online parameter estimation. The optimized consequent parameters are shown in Table 1.
The optimized consequent parameters

3.3.2 Anti- overturning Speed Control
When the waves are too big or rolling resonance occurs, the rolling angle increases dramatically. A rudder roll stabilization controller cannot limit it to the classical domain due to its limited roll reduction rate. Then the control enters the extension sphere. The measurement model is determined by the correlation values of characteristic parameters. In measurement model M21, the controller gives out an anti-capsizing alarm signal level 3, the control system increases speed control to reduce large rolling. Speed control is mainly in the following two aspects. On one hand, the speed is closed related to the roll damping efficiency of the roll damping controller. When the speed is high, the roll damping controller works better. When the speed is low, the roll damping controller has a lesser performance. Therefore, the efficiency of the controller can be increased by adjusting the submarine speed. On the other hand, speed control can help to avoid resonant movement, which may cause massive rolling and capsizing. The forced rolling amplitude in regular waves of a submarine can be demonstrated as follows:

where a0 is the maximum wave surface angle, TR is the rolling cycle of the ship(s) and TW is the wave cycle(s).
When TR/TW=1, the cycle of the two is almost the same, the submarine rolls most violently, the rolling angle becomes bigger and bigger and then the submarine will overthrow. This phenomenon is called resonant rolling. It can be calculated as follows:

The inherent swing cycle of submarines TR is the time needed for one submarine rail to roll from one to another rail and then swing back to the original rolling position. B is the beam of the submarine (m), GM is the metacentric height (m) and C is the cycle coefficient of rolling.
The cycle of the wave in relation to the ship's cycle is called the wave encounter cycle TE (also called the wave apparent cycle). When the submarine travels on the sea, the way it heads forms an angle with the coming direction of the waves. This angle is called the encounter incident angle χ. The wave crest in relation to the speed of the submarine is called the apparent transmission speed VA [25]:

The encounter cycle of waves:

where λ is wavelength (m) and C is wave speed (m/s).
When submarines are performing resonant movement in waves, the rolling is strengthened and if no actions are taken, submarines will overturn. It can be judged from Equation (25) that changing the submarine speed will change the encounter cycle of waves, thus avoiding resonant movement. This method is very simple and effective for submarines in the process of travelling.
Furthermore, it can be judged from Equation (26) that when χ =90° or χ =270° in inclined waves TR =TE, at this moment, a change in the submarine speed will have no influence on the wave encounter cycle. That is to say, submarine speed control cannot work on resonant movement, which is caused by inclined waves, at this moment; only a change in direction can avoid resonant movement and reduce rolling.
3.3.3 Anti- overturning Direction Control
When submarines are travelling against waves, trouble will occur for the submarines despite whatever relative position submarines have in relation with the waves. For example, in an inclined wave, due to the close swing cycle of submarines and that of the waves, submarines are likely to lose stability. At this moment, change in speed will serve no purpose and the inclined angle will continue getting bigger. In line with the characteristic value correlation functions, the system enters measurement model M22 and the controller gives out anti-capsizing alarm level 2. The control system reduces the big rolling by increasing direction control. Using direction control, the strikes from waves can be mitigated so as to reduce submarine rolling. In fact, avoiding rolling and overturning by changing direction is a practical and effective method when travelling.
For a submarine moving with forward speed U, the wave frequency ww should be changed to the encounter frequency we in the equations. The relation between wave frequency and encounter frequency is:

where ωw2 = kg (assuming deep water) and χ is the encounter angle, the angle between the submarine heading and the direction of the wave propagation. Notice that the encounter frequency can be negative for large values of U when |χ| < 90°. The definition of the encounter angle χ is shown in Figure 8.

Definition of the encounter
Ocean waves are a kind of undulatory phenomenon, which occur in oceans. Ocean wave observation is divided into ocular measurement and equipment observation. Wave direction, wave height and cycle can be observed by wave meter and wave type and sea condition level can be observed by ocular measurement. When submarines travel on the sea, the direction of the submarine and the waves form an incident angle χ, such as heading wave χ =0°, following wave χ =180°, beam sea χ =90°. Plus, there are also partial heading waves and partial following waves.
When submarines travel on the sea, the most important thing is to avoid beam sea because beam sea can make submarines roll violently and dangerous rolling or even overthrowing may occur. In heading waves, massive waves strike on the deck and waves come to the deck, causing blank run, thus damaging the submarine body, equipment, rudder and propeller. If adjusted to following wave travelling for mitigating the strikes from the sea, the submarines will suffer from pooping. So it's extremely dangerous to broach when the efficiency of the rudder is reduced. Submarines often adopt partial heading travel or partial following travel methods, e.g., the Z travelling method, as shown in Figure 9. Changing the direction when dealing with the beam sea keeps the bow from suffering great strikes, reduces rolling and pitching as well as enabling the submarine to return to the planned route. The method of partial heading wave Z is to let the submarine go against the waves in front from left or right so as to let the incident angle to be become a partial heading wave. After travelling for a while, the other side can be used to go against the waves. The process of Z travelling is then repeated. When travelling in following sea, the incident angle can become the partial following direction so as to avoid broaching.

Z Navigation law angle of submarine with waves
4. Simulation
The simulation of a control system with rudder roll stabilization was established in MATLAB software. The wave disturbance model considered in simulations is a linear approximation of the Pierson-Moskowitz spectral density function. A wave model was adopted. Sixth-grade sea condition was simulated with the following settings: average wave period Tw=8s, significant wave length h1/3=3m, damping coefficient ζ =0.3, submarine speed V=10m/s and encounter angle χ =30°. Eighth-grade sea condition was simulated with the following settings: average wave period Tw=12s, significant wave length h1/3=8m, damping coefficient ζ =0.5, submarine speed V=10m/s and encounter angle χ =60o. The performance of the controller for rudder roll stabilization was then tested in the simulation system, as shown in Figure 10.

Simulation results of rudder roll stabilization under sub-measurement mode M1
When the system is under measurement mode M1, the rudder roll stabilization controller is adopted to send out roll stabilization orders to control the rolling. The simulation results are given in Figure 10. The solid line is the result of roll damping and the dotted line is the result without roll damping. From Figure 10(a) we see that the roll reduction is approximately 52% in the sixth-grade sea condition. Figure 10(b) shows that the roll reduction is approximately 48% in the eighth-grade sea condition. The simulation results show that the stabilization effect of the controller designed is relatively satisfied.
In order to examine the robustness of the designed rudder roll stabilization controller, great perturbations have then been added to the initial model. The simulation results in Figure 11 show that, when the submarine model parameter changes significantly, the anti-rolling rate of the rudder roll stabilization controller is 46%. The experiment indicates that the controller designed has strong adaptability and robustness.

Simulation results of rudder roll stabilization with model perturbation under sub-measurement mode M1
When the wave disturbance is significant and the roll angle and roll rate are big, the value range of the system characteristic state is within the extension domain range. Then the system is under the measurement mode M2. Two extension sub-domains were designed. For the measurement mode M21, speed control is adopted to reduce the rolling. The speed control should be first used, as the speed is closely related with the anti-roll efficiency of the roll stabilization controller. When the speed is high, the anti-rolling control of the rolling stabilization controller is most efficient, whereas the anti-rolling effect is reduced when the speed is low. A simulation was conducted, supposing U=20m/s, U=10m/s and the incident angle χ =45° in ninth-grade sea condition. The rolling is bigger due to the big disturbance.
As a result, the course control is adopted to reduce rolling. The result of the simulation is shown in Figure 12, which show that when the submarine travels at a speed of U=20m/s, the efficiency of the rudder roll damping controller is obviously higher than that of when the submarine travels at a speed of U=10m/s. When travelling at a low speed, the efficiency of the controller is reduced. When running into a big disturbing torque, the submarine rolling angle may exceed the classical domain (suppose the critical value is 10°) in actual travelling. If the big disturbing torque continues for a while without being weakened and rolling continues at a degree of more than 10°, the system enters an anti-roll over alarm sphere level 3. The navigating mate has to adjust the speed in line with the situation of the ship. When the speed is adequately raised, the roll damping efficiency of the rudder roll damping controller is also raised and the rolling angle is reduced to under 10°. Therefore, it's easy to see that when the characteristic value enters into the extension domain, it can return into the classical domain with an increase of other characteristic values and the controller's sphere of control can be extended accordingly.

Simulation result of speed control for anti-rolling at ninth-grade sea condition under sub-measurement mode M21
During the experiment, the wave disturbance was enlarged, hence the rolling angle increased. If the rolling continues to increase and the system is classified as in measurement mode M22, when the submarine is travelling on the sea, the incident angle χ is closely connected with the rolling of the submarine. In the following section, various kinds of incident angle's influence on the rolling of submarine will be discussed. Several encounter angles are analysed: following sea (χ =0°), quartering sea (χ =45°) and beam sea (χ =90°). In the following, suppose the speed is U=20m/s and the sea condition is tenth-grade. A simulated comparison is made in the rudder roll damping control system, as shown in Figure 13.

Simulation result of course control for anti-rolling under sub-measurement mode M22
As shown in Figure 12, in following sea χ =0°, the submarine travels in heading waves and the rolling amplitude of the submarines is at its smallest. In quartering sea χ =45°, the submarine travels in partial heading waves and the rolling amplitude is slightly bigger than that in heading waves. In beam sea χ =90° and the rolling is at its peak. The rolling cycle of the submarine and that of the waves are near in beam sea so a change in speed will have no influence on the wave encounter cycle at this moment. Therefore, the incident angle can be changed and beam sea avoided by changing direction.
In Beam Sea, submarines near the water surface are very likely to lose stability and thus overturn. Therefore, it is necessary to change the direction to avoid beam sea. In heading waves and following waves, the rolling amplitude is at its lowest but the pitching is at its highest, so submarines often adopt partial heading wave or partial following wave travel, which is Z travelling. In big ocean waves, the rudder order is changed to reduce rolling. The previously designed direction controller can change direction automatically. By changing the direction, strikes on the submarine are mitigated and the incident angle is reduced into the classical domain.
5. Summary
This paper studies rudder roll stabilization and the anti-overturning control of the submarine to improve the safety of navigation when it is operating near the sea surface or at a high wave level. This paper researches hybrid intelligent control to provide a new approach for roll stabilization and anti-overturning. Neuro-fuzzy control is utilized to improve the controlling ability of uncertain systems and extension control is applied to extend control range. The roll controller designed is capable of reducing the roll of submarines generated by waves, so as to prevent the submarine from over-turning. The main purpose of the experiments in the paper is to test the control ability of the rudder roll stabilization controller, that is, under different sea conditions, the controller can effectively enable the submarine to remain stabilized and controlled using different control strategies. When the rolling angle caused by the wave disturbance is small and within the classical domain range, the rudder roll controller worked well with the anti-rolling rate achieved around 50%. When the rolling angle caused by the wave disturbance is big but still within the extension domain range, speed control is adopted. The simulation experiments indicate that speed control can indeed reduce the rolling angle to the classical domain range, which is within the control range of the rudder roll stabilization controller. During the experiments, the wave disturbances were enlarged, hence the rolling angle increased. As a result, the course control is adopted. The simulation results show that the controller proposed can achieve a satisfying control performance in submarines stabilization.
6. Acknowledgments
The authors are grateful to the National Natural Science Foundation of China (60272089) for decisive support.