
Abstract
In multi-robot system the ability to exchange information can reduce the uncertainty in the estimated location when robots can see each other. In this paper, a kind of dynamically evolving coordination architecture is proposed for cooperative localization according to the relative positions between robots. And to further improve the efficiency of cooperative localization, a decision theory based mechanism is proposed to make the robots cooperate actively during the localization process. Since stably tracking the multi-hypothesis of the robots' own position and their partners' position is of great importance for making a good decision of where to go in active localization, the co-evolution based adaptive Monte Carlo localization method in which samples are clustered into species to represents a hypothesis of robot's pose in a higher level than a single sample is adopted. Experiments are designed and carried out to prove the efficiency and stability of the proposed method.
Introduction
Global localization is a challenging problem, in which robots are required to estimate their pose by local and incomplete observed information under the condition of uncertain initial pose. In recent years, much work has been done for the single robot global localization and several approaches based on probabilistic theory are proposed, including grid-based approaches (Burgard, W., Fox, D., Hennig, D. & Schmidt, T., 1996), topological approaches (Kaelbling, L. P., Cassandra, A. R. & Kurien, J. A., 1999), Monte Carlo localization method(Dellaert, F., Fox, D., Burgard, W. & Thrun, S., 1999)(Thrun, S., Fox, D., Burgard, W. & Dellaert, F., 2001) and multi-hypothesis tracking (Dellaert, F., Fox, D., Burgard, W. & Thrun, S., 1999).
In many robot applications, a multi-robot system has to be used to complete the task cooperatively. As in a single robot system, knowing their relative positions and their global positions in the environment is the precondition for performing tasks and coordination, that is, localization is also of great importance in multi-robot system. A simple way for multi-robot localization is to determine their positions independently. However, fusion of information in multi-robot system can reduce the uncertainty in the estimated location(Fox, D., Burgard, W., Kruppa, H. & Thrun, S., 2000). So more and more researchers have been attracted by the cooperative localization problem, and several methods have been proposed such as Extended Kalman Filtering (Roumeliotis, S. I. & Bekey, G. A., 2002)(Raj, M., Kingsley, F. & Lynne, E. P., 2004) (Hidaka, Y.S., Mourikis, A.I. & Roumeliotis S.I., 2005), Particle Filtering (Fox, D., Burgard, W., Kruppa, H. & Thrun, S., 2000) (Ioannis, M.R., Gregory, D. & Evangelos, M., 2003), Maximum Likelihood estimation (Howard, A., Mataric, M. J. & Sukhatme, G. S., 2002), and Set Membership approaches(Marco, M. D., Garulli, A., Giannitrapani, A. & Vicino, A., 2003). At the same time some special problems for cooperative localization including sensor fusion (John, R. S., 2003) and propagation of uncertainty (Roumeliotis, S.I. & Rekleitis, I.M., 2004) are also discussed.
An area that has received some attention in the single-robot case (Fox, D., Burgard, W. & Thrun, S., 1998) and very little attention in the multi-robot case is the active localization. If a robot can explore actively in the process of localization, it can get more useful information for global localization. For single robot system, a method using entropy to evaluate the utility of the robot's action was proposed (Fox, D., Burgard, W. and Thrun, S., 1998). And Jensfelt et al. proposed an active localization method with a topological map (Jensfelt, P., & Kristensen S., 2001). Also a method using Bayes network for sensor planning in localization was proposed (Hongjun, Z. & Shigeyuki, S., 2002). What's more an approach that actively selects the orientation of the laser range finder to improve the localization results was proposed (Rainer, K., Patrick, P., Rudolph, T. & Wolfram B., 2007).
In this paper, a kind of dynamically evolving coordination architecture is proposed for cooperative localization according to the relative positions between robots. And to further improve the efficiency of the cooperative localization, a decision theory based mechanism is proposed to make the robots cooperate actively during the localization process. Since in active global localization it is very important to make the robot stably track multi-hypothesis of its own position and its partners' positions in order to make a proper decision, CEAMCL (Ronghua, L. & Bingrong, H., 2004) method is used for cooperative localization, in which samples are clustered into species and a co-evolution strategy is applied to prevent the premature convergence of the traditional MCL.
Dynamic Architecture of Active Localization in Multi-robot System
A dynamically evolving coordination architecture is proposed for our active localization approach. We assume that robots can determine their relative positions when they see each other. And the relative positions between robots will also be updated according to their motion model for some time when one robot disappear from the eye of the other robot.
At each point of time, the state of the system can be summarized by a graph structure where the nodes are individual robots and the edges represent the relationship between robots (see Fig. 1). An isolated node represents that the robot doesn't known its relative position to that of the other robots and cannot communicate with other robots. In this case the robot, tries to determine its global position by itself as in a single robot system. Another kind of the relationship between robots is that they do not know their relative positions but they can communicate with each other, which is represented by dotted line in Fig.1, such as robot 2 and robot 3. In this case there may be several hypotheses of their relative positions. In order to actively verify their relative positions, the two robots are arranged to meet one another at a rendezvous point. As shown in Fig 1 (b), robot 2 will manage to meet robot 3 so as to determine its position more quickly with the help of the information gotten by robot 3. If the robots fail to meet, the hypothesis will be rejected and they continue to select the other hypothesis for verification. A key substructure of our architecture is the connected group indicated by the shade areas in Fig.1. In the connected group, two robots that know their relative positions and can communicate with each other are connected by a solid line. Each group determines one robot as a leader to be responsible for the coordination of their exploration strategy (robot 4 and robot 9).

The dynamic relationship between robots
Since to maintain a single state for all the robots is infeasible, a hierarchical structure is used. In a group, each robot maintains its own belief function that models its own uncertainty in a distributed way, i.e. the information of its position estimated by other robots will be fusion by each robot itself. And several hypotheses of their global positions will be summarized and transmitted to the leader. The leader will estimate the most likely positions that the robots are located. Then several possible actions and their corresponding utilities and costs will be calculated according to the estimated position of each robot. The leader will choose an action for each robot to maximize the utility for the group. The active coordination structure of multi robots is shown in Fig.2.
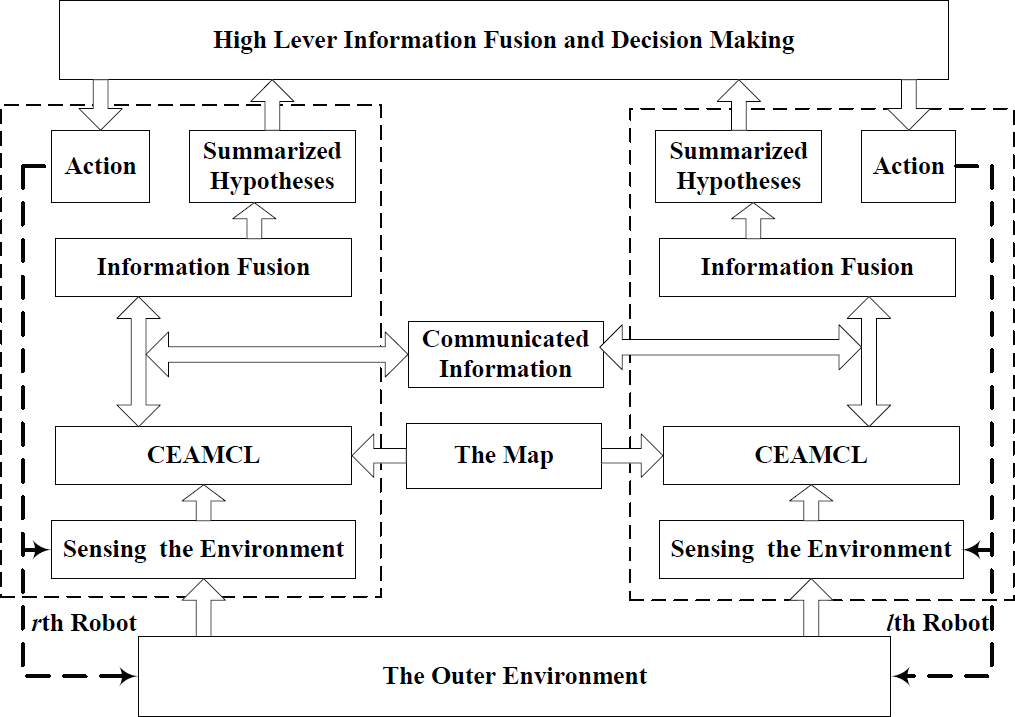
Multi-robot active localization architecture
Monte Carlo localization (MCL) which is based on sequential Monte Carlo importance sampling (Andrieu, C. & Doucet, A., 2002), can represent non-linear and non-Gaussian models well. So MCL has become the most popular localization method, and many improved versions of MCL have been proposed including mixture-MCL (Thrun, S. et al, 2001), adaptive particle filtering (Fox, D., 2003), clustered particle filtering (Milstein, A. et al, 2002) and CEAMCL (Ronghua, L. & Bingrong, H., 2004). In CEAMCL samples are clustered into species which will evolve according to a co-evolutionary model derived from the competition of ecological species, and the size of the species will adaptively change according to the state of the robot. In this way CEAMCL can not only prevent premature convergence of MCL but also improve its efficiency, so CEAMCL is selected for cooperative localization.
In this section we discuss the application of co-evolution based adaptive Monte Carlo localization in multi-robot system. The co-evolution based adaptive Monte Carlo localization is briefly reviewed in the first sub-section, and cooperative localization of multi robots based on CEAMCL is discussed in the second sub-section.
Coevolution Based adaptive Monte Carlo Localization
In CEAMCL samples are clustered into groups which are also called species. And the Lotka-Volterra model derived from the competition of ecological species is introduced to make the species evolve cooperatively, so the premature convergence can be prevented. And genetic operators are used for intra-species evolution to search for optimal samples in each species. So the samples can represent the desired posterior density better, and precise localization can be realized with a small sample size.
Let us assume the samples of the r-th robot are clustered into 2 species (clusters) at time t. Inspired by ecology, when competing with other species, the population growth of a species can be modeled using the Lotka-Volterra competition model. The Lotka-Volterra competition model for the 2 species includes two equations of population growth for the two competing species respectively.


Where
In CEAMCL the genetic operators, crossover and mutation, are applied to search for optimal samples in each species independently. The intra-species evolution will interact with inter-species competition: the evolution of individuals in a species will increase its ability for inter-species competition, so as to survive for a longer time. Besides the inter-species competition and intra-species evolution, an environment source model is built according to the living domain of each species which represent the uncertainty of localization to adjust the size of species adaptively.
Multi-robot localization is to integrate measurements taken at different platforms. The simplest way to integrate the information from different platforms is to maintain a single state for all the robots, i.e. if there are R robots, the state of the system will be of 3R dimension. But in this case the state of the system will be too large even for a small number of robots, thus to estimate the distribution of the pose of all the robots is infeasible. So a distributed representation is used in our system similar to the method in(Fox, D., Burgard, W., Kruppa, H. & Thrun, S., 2000), in which each robot maintains its own belief function that models its own uncertainty. The posterior of position is given by:

Where R is the number of the robots, d(t) is the data items collected by all robots up to time t.
The distributed representation ensures that the estimation of the posteriors is conveniently carried out locally on each robot. When the l-th robot knows the position of the r-th robot relative to itself, the relative position
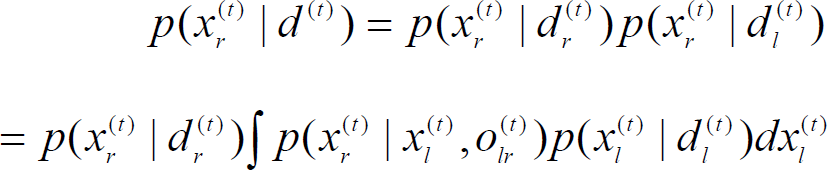
Where
During the integration of information, two cases are considered in the calculation of
And to solve Eq. 4, firstly the sample set
Algorithm for cooperative localization

The researchers have realized that active exploration strategy is important to improve the efficiency of global localization. But little attention has been paid to the active localization in multi-robot system. In this paper we proposed a strategy based on the decision theoretic for coordination between robots. The strategy includes three steps: in the first step the robots in the same group submit their global position hypotheses to the leader robots who will determine the most likely positions of the robots in the group; in the second step several candidate action are generated for each robot according to the most likely positions, and the pay-offs of the actions are calculated; in the last step the leader will solve the conflictions between robots and choose a next action for each robot so as to get the largest pay-offs for the connected groups.
Position Estimation of the Connected Group
In multi-robot cooperative localization based on CEAMCL, each species represents a hypothesis of the position of the robot. The summarized hypotheses of positions and the relative positions between robots are transmitted from the robots to their leader. And the position of the leader will be estimated again according to the information from other robots. Suppose the leader of a group is the l-th robot and the r-th robot is a member under its leadership. The probability that the leader will be in the position represented by the hypothesis h
li
(t) according to the data collected by the r-th robot and the relative positions between them can be represented by the following equation:

Where h
li
(t) is a hypothesis of the position summarized by the species i of the l-th robot, h
rj
(t) is a hypothesis of the position summarized by the species j of the r-th robot, Ωr(t) is the number of species of the r-th robot, o
rl
(t) is the relative position between the l-th robot and the r-th robot, 
Where α is a normalization parameter. The hypothesis hlmax(t) with the largest probability is supposed to be the position of the l-th robot. And the hypothesis hrmax(t) which has the largest value of 
Then the position hypothesis will be transmitted from the leader to the robots under its leadership. For a robot that is not connected with any other robots, its global position is calculated from the species with the largest average importance factor.
The world model in our system is represented by a hybrid map of grid and topology. For a grid map a Voronoi Diagram is produced using an approach similar to the one proposed in (Thrun, S., 1998). The grid map is partitioned into disjoint regions using the critical lines, as shown in Fig.3(a), and each region corresponds to one or more topological nodes which is the furcate point of Voronoi Diagram or the middle point if there is no furcate point as shown in Fig. 3(b).

Hybrid map of grid and topology a) Disjoint regions of grid map b) topological nodes in Voronoi Diagram
By using the position hypothesis hlmax(t), we can get the topological node in the environment around the group. At any point in time the robot in each group can be assigned either to a topological node or to a rendezvous point of another robot. Coordination can be phrased as the problem of finding the assignment that maximizes the utility-cost trade-off. More specifically, let W denote an assignment that determines which robot should move to which target (topological nodes and rendezvous point) then each robot is assigned exactly to one target and W(r, j)=1 if the i-th robot in the connected group is assigned to the j-th target. Among all the assignments we choose the one that maximize the expected utility and minimize the expected cost:

The utility and cost of each robot target pair (r, j) can be calculated as follows.
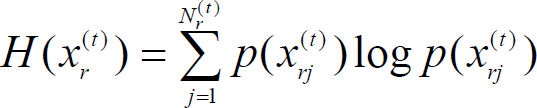
The entropy of the belief measures the uncertainty of the robot position. We can measure the utility U(r, j) of performing an action a by the decrease in the uncertainty:

If the target is a topological node 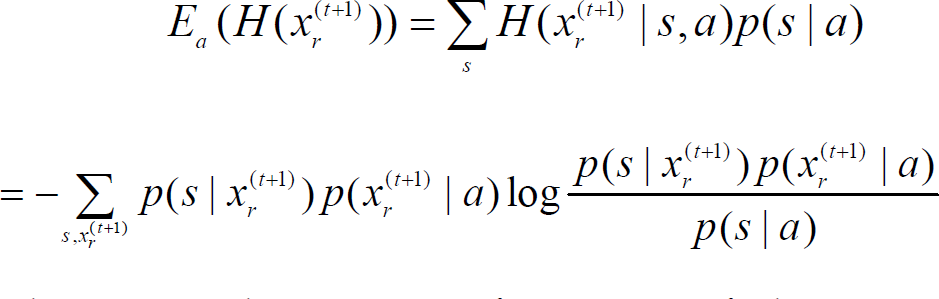
Where s is the sensor information. If the target is a rendezvous point with another robot not in the group 
Where 

Where f a (x(t+1)) represent the location relative to the robot defined by action a when the robot is at the position x(t+1). Based on p acc (a), the expected path length and the cost-optimal policy can be obtained through value iteration. And the cost C(r, j) can be calculated according to the length of the optimal path.
Compared with MCL, CEAMCL requires more computation for each sample. But the sampling process is more efficient in CEAMCL, so it can considerably reduce the number of samples required to represent the posterior density.
The resampling, importance factor normalization and calculating statistic properties have almost the same computational cost per sample for the two algorithms. We denote the total cost of each sample in these calculations as T
r
. The importance sampling step involves drawing a n dimensional-vector according to the motion model
The process of merging the information from the other robot l includes three sub-steps: to calculate the density function
The strategy determination includes calculating the utility and cost whose computational cost includes several times of drawing a n dimensional-vector according to a density function such as
The computational costs of other steps in CEAMCL are not related to the sample size, so they can be neglected. Defining N
M
and N
C
as the number of samples in PF and CEAMCL respectively, the total computational costs for one of the iteration in localization T
M
and T
C
are given by:


The most computationally intensive procedure in localization is the computation of the importance factor which has to deal with the high dimensional sensor data, so T
f
is much larger than the other terms. It is safe to draw the following rule:

Since it is not necessary to make a new exploration strategy in every time step, the parameter f can be controlled to be less than 1.
In this section we conduct the experiments with three robots: one is the Pioneer2 equipped with 16 sonar sensors and a CCD camera; the second one is the Pioneer3 equipped with 16 sonar sensors, a front laser range finder and a CCD camera and the third one is the HIT-Ghost which is equipped with two cameras (see Fig.4.). The robots can detect each other using their CCD cameras, and can communicate with each other with the wireless Ethernet. Experiments are carried out in our lab building whose map is shown in Fig. 5(a). In the experiments the 2D hybrid map built by the robot shown in Fig. 5(b) are used to estimate the location of the robot including its position(x, y) and its orientation θ. In order to make HIT-Ghost can localize only with visual information, some color marks are pasted on the doors or on the floor.

Picture of robots used for experiment.

The map of the environment. a) The map drawn by hand; b) the map built by the robot using laser range finder.
Since even in multi-robot system the robots have to perform localization by themselves when they do not connect with each other, we first evaluate the quality of CEAMCL with active exploration strategy for single robot localization, in which the initial sample size is 1500, crossover probability equals 0.85 and maximum possible rate of population growth of species

CEAMCL with active exploration strategy in single robot system
And experiments are carried out to evaluate the localization errors of CEAMCL and A-CEAMCL (CEAMCL with active exploration strategy) for single robot with laser range finder and with front camera only. The average localization errors of 20 times of experiments with 1500 initial samples are shown in Fig.7, in which the labels of CEAMCL-LF and CEAMCL-FC represent localization errors of common CEAMCL method with laser range finder and front camera respectively; and the labels of A-CEAMCL-LF and A-CEAMCL-FC represent localization error of active CEAMCL with laser range finder and front camera respectively. The experimental results show that the error of CEAMCL-FC is much larger than CEAMCL-LF. Since performing localization with camera the robot can only see several color landmarks in the environment, and at the same time A-CEAMCL performs much better than common CEAMCL. Since the robot can get much more useful information with the active exploration strategy.

Localization error in single robot system with different methods and sensors
Then we evaluate the multi-robot localization based on CEAMCL with 1500 initial samples for each robot. The three robots are randomly placed in the environment and explore actively by themselves as in single robot localization at the first stage (see Fig.8). In Fig.8 Pioneer3 is represented by red particles, Pioneer2 is represented by green particles and HIT-Ghost is represented by blue particles. When the two Pioneer robots can communicate with each other, a rendezvous point R is determined by them to manage to meet each other (see Fig.8(a)). When they can see each other their observation information will be exchanged, so their global positions can be refined and only two localization hypotheses are remained for each robot (see Fig.8(b)). And Pioneer3 is assigned to be the leader to coordinate their actions to go to an optimal topological node (see Fig.8 (c)). Since the color marks in the environment are sparse and specious, the global position of the HIT-Ghost is very uncertain. When the HIT-Ghost can communicate with the two Pioneer robots, the utility to meet the other two robots is much larger than to go to a topological node, so the HIT-Ghost will manage to meet the Pioneer3 (see Fig.8(d)). The time to determine the global position of the robots using no-cooperative localization, cooperative localization and cooperative active localization based on CEAMCL, which are termed CEAMCL, C-CEAMCL and CA-CEAMCL for short respectively, are compared. In 20 times of experiments, the time needed for the localization of CA-CEAMCL and C-CEAMCL are 62% and 89% of that of CEAMCL respectively.

Multi-robot active localization based on CEAMCL
And at last, the localization errors of C-CEAMCL and CA-CEAMCL for multi-robot system are compared as shown in Fig.9. The labels of C-CEAMCL-LF and C-CEAMCL-FC represent the localization errors of the cooperative CEAMCL method for the robot having laser range finder (LF) and only having front camera (FC) respectively. And the labels of CA-CEAMCL-LF and CA-CEAMCL-FC represent the localization error of cooperative CEAMCL method with active exploration strategy for the robot having laser range finder (LF) and only having front camera respectively. From Fig.7 and Fig.9 we can see that the cooperative localization of multi-robot can remarkably reduce the localization error especially for the robots which are equipped with sensors of poor quality such as the front view camera in our experiment, since in cooperative localization the robot can get useful information from the other robots which can perform localization better. We can also see that the active exploration strategy in cooperative localization is useful too, since the robots can cooperate with each much more efficiently by using the active exploration strategy.

Localization Error of cooperative licalization in multi-robot system with different methods and sensors
A novel method for the active localization of multi-robot is proposed. By using the CEAMCL method, the problem of premature convergence can be solved, so the hypothesis of the robots' positions can be tracked stably. And the decision theory- based coordination strategy can efficiently coordinate the action of the robots so as to maximize the utility-cost trade-off. Experimental results have proved the efficiency of the method of the active localization in multi-robot system.