
Abstract
Indoor localization has attracted increasing research attentions in the recent years. However, many important issues still need to be further studied to keep pace with new requirements and technical progress, such as real-time operation, high accuracy, and energy efficiency. In order to meet the high localization accuracy requirement and the high localization dependable requirement in some scenarios, we take the users as a group to utilize the mutual distance information among them to get better localization performance. Moreover, we design a mobile group localization method based on extended kalman filter and believable factor of non-localized nodes, which can alleviate the influence caused by environmental noisy and unstable wireless signals to improve the localization accuracy. Besides, we implement a real system based on ZigBee technique and perform experiments on the campus of Huaqiao University. Experimental results and theoretical analysis validate the effectiveness of the proposed method.
Introduction
Indoor localization has attracted increasing research attentions in recent years, as they enable location-based services (LBS) across a wide range of indoor applications (such as healthcare, safety, social networks, and smart game entertainment). 1 Recent advances in mobile and wireless communications have introduced multiple techniques to implement high-resolution indoor localization, such as wireless sensor networks (WSNs). 2
WSNs have a wide range of applications, such as target location.3,4 It is a technology that use wireless signal to calculate the location information of objects. 5 In recent years, wireless location technology has been widely used to improve location accuracy in military, 6 industry, 7 agriculture, 8 and other fields.9,10 Accuracy is currently the core problem for wireless location technology to be solved. For example, the number of industrial accidents in the construction industry in Hong Kong is more than one-tenth of all the industrial accidents according to the government report. As for the location detection of builders in a building on emergency, if we can know the exact position of the builders, we can get more information about the emergency, monitor the security situation of builders, and direct rescue operations.11,12 However, because of the mobility and sheltered by barrier, the signal from fixed anchors may not well received. In this application, with our method, the builders can cooperate with each other (as a group) to get better localization accuracy (receive localization signal from both fixed anchors and other builders). For the localization accuracy, more accuracy localization results can provide better application for the users, such as distinguishing the specific room the users located. If a high-accuracy location method is used to monitor the position of workers in real time, warning of impending dangers and avoiding the occurrence of such dangers timely are easy to realize. Therefore, it is necessary to develop an accurate mobile group users’ location system. 13
Tsai et al. 14 propose that precise location is the key factor to realize innovation and application in intelligent transportation system. Improving the accuracy of the whole and reducing the cost of execution make collaborative location a promising accurate vehicle location method. In the vehicle-mounted ad-hoc network, due to its integrated development in vehicle-mounted navigation systems, the global positioning system (GPS) is commonly used as a vehicle location tool. However, there are still some inaccurate effects on GPS location accuracy (multipath effect, atmospheric effect, etc.).
Some researchers propose algorithms to improve the accuracy of GPS. A cooperative positioning (CP) method is proposed in previous studies.15,16 It integrates the camera sensors that can improve location errors, even if there are only two vehicles in the vehicle ad hoc network (VANET) and it can still be applied. In addition, this article proposes a method that does not require any additional information, such as urban digital maps which increase the location error in practice. 17 A high-precision global location solution based on GPS and mobile phone which can be used to capture human position is designed and realized. 18 The key point of the design is that smart phone allows navigation to calculate precise and local coordinates that support the user’s trajectory, while GPS provides global but inconsistent coordinates.
Because of higher location accuracy than GPS, the location technology based on WSNs can meet the needs of people’s requirement. 19 In such technologies, there are two kinds of nodes in the network: beacon node and ordinary node. The beacon node refers to the node of the stationary position information in the network, and its position information is known during the location process; the ordinary node which is solved by the location algorithm to locate its own position is based on the location provided by the beacon node. Besides, the common range-based localization approach refers to the non-localized node through its distance information or angle information with the beacon node and combines with the coordinates of the beacon node itself, such as based on time difference of arrival (TDOA), time of arrival (TOA), received signal strength (RSS), and angle of arrival (AOA).20,21
However, in the actual application scene, because WSNs are often deployed in unmanned environment and due to environmental reasons, sensor node location offset, and noise and other factors that affect location accuracy, the result of location error is very large. Therefore, how to improve the accuracy of location result has become an important research direction of WSN location. A mobile group users’ location algorithm based on extended Kalman filter (EKF) and believable factor of non-localized nodes is proposed to improve the accuracy of the location through collaboration between nodes. The nodes to be located are taken as a group, which use not only the distance relationship between anchor nodes and the non-localized nodes but also the distances between different non-localized nodes. Besides, the influence of noise in the environment can be reduced by EKF.
Our main contributions are as follows:
We focus on the applications to locate the mobile group users and regard the mobile users as a group to utilize the mutual distance information among them to get better localization performance.
To further improve the localization accuracy, we extend the traditional Kalman filter algorithm based on the believable factor of non-localized nodes to alleviate the effects of noise in the environment and the instability of wireless signals.
We implement a real system and conduct experiments in a real environment. The performance of the proposed method is validated by extensive experimental results.
The rest of this article is organized as follows. In section “Related work,” related work is introduced. The proposed model is presented in section “Model design.” Section “Algorithm design and analysis” presents the detailed design of the algorithms. Some experimental results and analyses are reported in section “Real-world experiments.” Finally, we conclude the paper in section “Conclusion.”
Related work
With the improvement of precise location, WSN precise location technology has improved tremendously in recent years. In the traditional location method based on stationary anchors, due to the influence of various environmental factors such as noise, reflection, and multipath propagation, the location error is large. The literature points out that conventional three-dimensional triangulation (Tri) may not be applicable as a direct line of sight between concerned nodes, and stationary references cannot be guaranteed in the more complex three-dimensional (3D) location scene of the Internet of Things. 22 In order to solve these problems, a spatial discretization-based position location information (PLI) acquisition algorithm is proposed in this article. The literature points out that the traditional 3D location algorithm is highly dependent on the beacon node, and most researchers have not considered if the beacon node is malicious or the beacon node malfunctions. 23 This article proposes a 3D feedback correction performance triangulation algorithm, feedback correction based on 3D triangulation (FC-TDT), which avoids malicious location of beacon nodes and improves accuracy and efficiency.
To solve the problem of environmental factors, some researchers proposed the use of Kalman filtering to overcome factors in the environment. 24 Kalman filtering algorithm was first proposed in Stanley Schmidt’s research work. It mainly includes forecasting and updating two processes. 25 Now, Kalman filtering has been used in many location studies, such as signal processing. The literature uses Kalman filter instead of particle filter to reduce the drift value of the RSS, but it does not consider the presence of moving nodes in the location node. 26 Considering the position prediction in the nonlinear motion of vehicles, the literature 27 proposes a nonlinear vehicle motion location prediction algorithm based on EKF. EKF is more appropriate than Kalman filter (KF) because it is designed to work with nonlinear systems. The performance of prediction algorithm for city and highway scene is measured by using mobile tracking based on practice and model. The literature 28 proposes a new data fusion framework that integrates WiFi positioning and EKF to achieve data fusion. In order to make EKF suitable, authors developed a measurement model based on nuclear density estimation which can achieve accurate WiFi positioning and adaptive measurement noise statistical estimation, which significantly improves the positioning accuracy of a separate system. However, there are two limitations of Kalman filtering: first, the system and observations must be linear; second, the state must be Gaussian, which restricts its further application.
In order to reduce the influence of node mobility and the instability of wireless signals, some researches have put forward some location schemes combining various methods. The literature 29 proposed and implemented the ArrayTrack system.30,31 It uses MIMO technology to track wireless customers in real time and combines FPGA and general calculation methods. The results show that the location of smaller errors can be obtained. Besides, Roy Want et al. proposed that the combination of Internet of Things and accurate location-finding technologies will enable a wide range of novel context-aware services to automate tasks and support everyday work practice.32,33 Literature 34 proposed that in all these location methods, location depends on distance, angle or arrival time. In this article, a hybrid mechanism for measuring distance and angle is considered. This mechanism uses a smart antenna architecture to provide an indoor location solution. In order to increase the pattern of position accuracy estimation using RSSI values, the precise location is achieved through adaptive filtering. 35 Literature 36 combines the unbiased finite impulse response method and Kalman filter algorithm to achieve the precise location purpose. Besides, some researches propose efficient algorithms based on believable factor to enhance the accuracy of localization. By defining nodes believable factor, top-down positioning scheme (TPS) insures the quality of the new reference nodes. TPS also refines the nodes which have just been positioned via the gradient method and helps non-localized nodes search for more reference nodes via the new scheme for 3D Euclidean distance estimation.37,38
However, this kind of location technology still has its shortcomings: first, the hardware requirements are high and the cost is large; second, the complexity of the algorithm is also very large. Some researchers have proposed the use of mobile nodes. The reason is that it can reduce the location error and improve the accuracy of the location nodes. However, because the mobile nodes in this method need constant self-position. Therefore, it must be equipped with GPS and other self-location equipment and mobile control module which increase the cost of the location system.
In this article, we propose a algorithm to combine the extended traditional Kalman filter and the believable factor of nodes together to localize individuals with high accuracy. The proposed method regards all the non-localized users as a group, and based on which the distance information among the users is exploited to increase the reference information when localize the users, thus it can achieve better localization performance.
Model design
Motion model
We consider the user who remains at a substantially stationary velocity in this article, and if the speed of the user varies widely, components of the acceleration can be added to the existing method by increasing the dimension of the matrices. Mobile users who move through the environment are usually described by their localizations and velocities in an
Therefore, the state of user node i at time t can be described by a state vector
Besides, the motion of the user nodes can be described by the following model:
The state transition matrix is defined as follows

where O is a sixth-order matrix (O is a sixth-order matrix for it must have the same number of rows and columns with m and m is a sixth-order matrix) all of whose elements are zero and m can be described as follows (T is the sampling time interval between two successive measurement times)
The reason is that the state vector of user i at time t is predicted according to its state vector at time

Measurement model
The measurement equation of the user nodes at the time instant t can be described as
Then, we have the following:
Algorithm design and analysis
Algorithm design
As we know that each anchor node has a communication range, which means not every non-localized nodes in its communication range. Each non-localized node calculates the number of stationary anchors that can communicate with it. The non-localized node to communicate with more than three stationary anchors can become a candidate node of mobile anchors.
The candidate moving nodes with high believable factor are selected to assist the location, and the EKF algorithm is used to complete the location in each group. The calculation formula of the believable factor of the node is as follows:
The believable factor of the anchor nodes set to 1.
Believable factor of other non-localized nodes is shown in the following
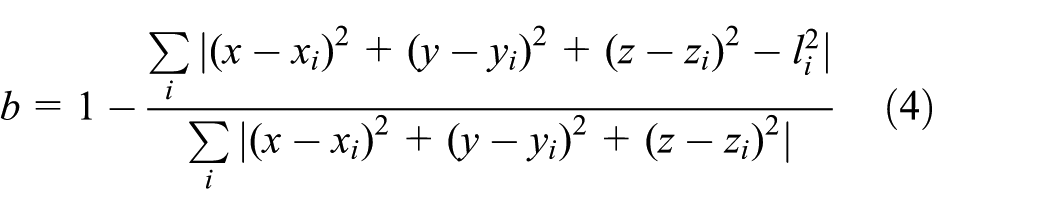
where x, y and z are the 3D coordinate of non-localized node, while
As for the Mobile Localization Algorithm Based on EKF (MEKF) method, in more detail, before the recursive localization process begins, the initial state
Then, it will calculate the measurement innovation, or the residual
Finally, it updates the posteriori state estimate
When the calculation is completed at time t, it updates the posteriori estimate error covariance to estimate the next position of the mobile user
For the next time interval, the preceding processes will be conducted again to determine the new positions of the users. The detailed steps of MEKF method are shown in Figure 1.

The basic steps of MEKF algorithm.
The detailed process of location are shown below. At the beginning of the location, the mobile anchors are elected according to algorithm 1, and the location area is divided into small areas that are the same as the number of anchor nodes. The stationary node is divided into the nearest group according to the distance to the different mobile nodes, and the stationary anchors are divided into the groups corresponding to the mobile anchors that can communicate. If the mobile nodes in each group are already positioned at the beginning of the location, they are no longer regrouped. If the mobile anchors in a group cannot be located, the above process will be run again to select new mobile nodes in different groups. Finally, each node in every group calculates the distance between each other and uses the MEKF method to localize non-localized node.

The analysis
This section gives the reason why our proposed method can get better localization performance. Assume that users
Assume that the distance from user i to anchor j is
If
If one of
If both

A simple localization illustration.
Time complexity analysis. An analysis shows that the time complexity of EKF is
Real-world experiments
Experimental environments
In order to further prove that our location method can be accurately located under the natural environment conditions, we have developed a location system and have done major experiments on the campus.
The basic setting of the experimental environment is as follows: the location is the square area of 20 × 20 m2, and the four stationary nodes are placed at the four corners of the square as the stationary anchors, one of which is the coordinator responsible for transmitting the data to the computer. The three nodes are moved along the edge of the location area, respectively. As shown in Figure 3. Figure 4 is a scene of the experiment in the school. The nodes in the red circle are stationary anchorage nodes, and three non-localized nodes move in accordance with the plan of Figure 3.
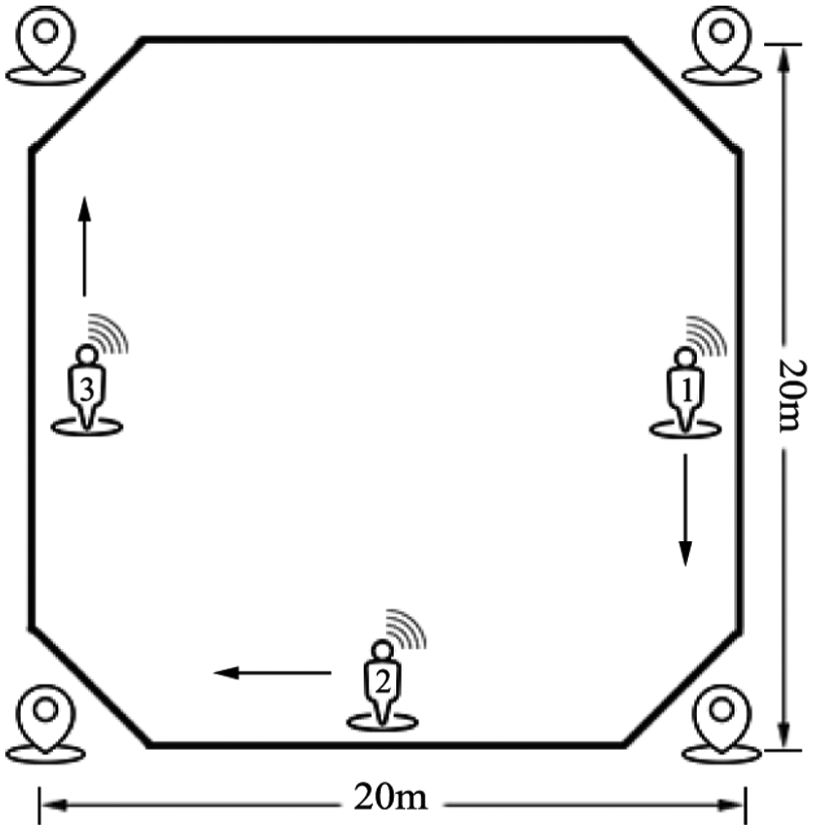
Illustration of the location scene.
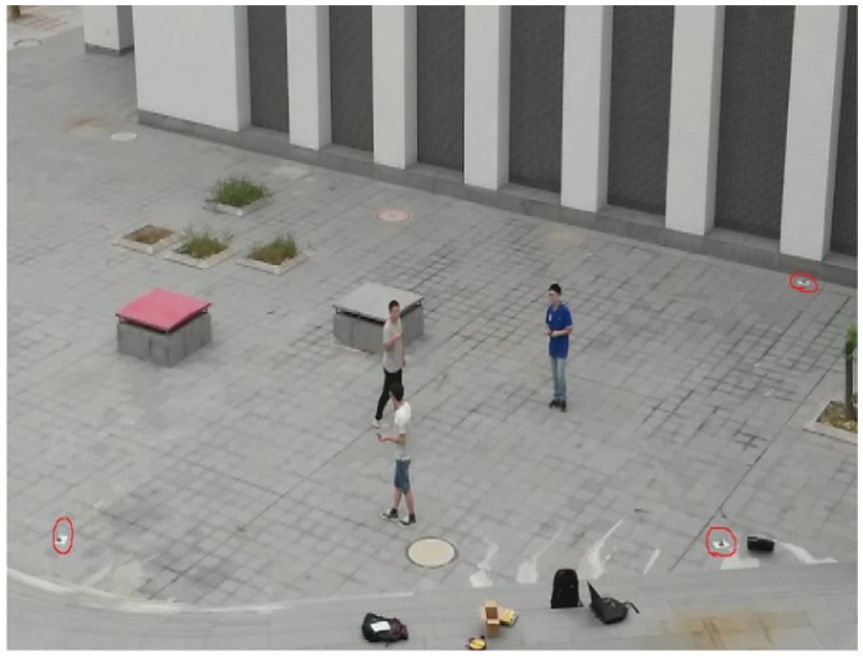
The experimental scene in the school.
The nodes which we used in the experiment are the CC2530 node. CC2530 node can burn the program through programming to make it have the function of the coordinator, router, or terminal node. The communication frequency of all nodes is once a second, and then, the information is collected and passed to the server through the coordinator based on the obtained signal value meter. After calculating the distance between nodes, we can use our proposed method to locate.
The experiment uses Visual Studio and MATLAB R2016b simulation software. The initial set prediction error Q is
Analysis of parameter
To convert our measured RSSI values into distances, we use the following formula

The formula involves parameters for the environmental factors A and n. In different experimental areas, the parameter A is different, but it is a fixed value. Once the environment is determined and stable, A can be measured by the device; but the environmental factor n is greatly effected by external factors.
The basic idea to calculate A and n is shown in Figure 5. Where D is the location node, and the three vertices A, B and C of the triangle ABC are the nearest three anchor nodes in the region where D is non-localized. A, B, and C can communicate with each other, and the distances are
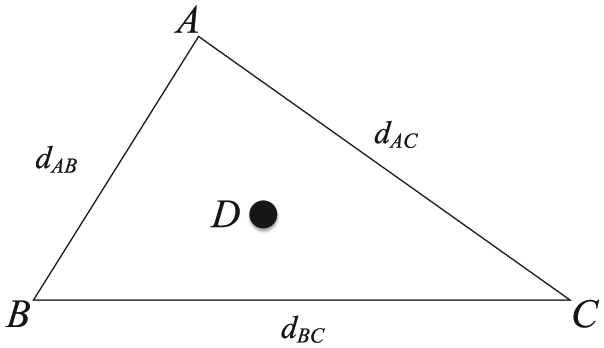
Illustration of the analysis of parameter.
When the signal is transmitted at node A, the RSSI received by B and C are

The parameters

Similarly, the parameter values

Then, the signal propagation model is determined according to these parameters and calculate the distance between the mobile node and the anchor node in the region where the mobile node is already located, and the position of the mobile node is finally determined. In our experiment, according to the measured data, A is 47 and n is 48.3, respectively.
Experimental results
In order to compare the performance of our proposed algorithm, we compare it with Tri and EKF algorithms, respectively. The Tri algorithm is based on the stationary anchor node triangulation method. The EKF method represents the EKF algorithm, that is, the location method using only stationary anchor nodes. The MEKF method refers to the location method proposed in this article.
Figure 6 illustrates the location result of the node 3 (we only give one result of three mobile nodes because other nodes have almost the same results in our experiment). In Figure 6, the stability of the result obtained by the Tri algorithm is not as good as the MEKF because the distribution of the two sides in the MEKF is more uniform. Compared with EKF, it can be seen that the location rate of the algorithm is higher because the bottom-side data based on EKF algorithm in Figure 6 are missing, indicating that the route of the EKF prediction in this location is not consistent with the actual result. Besides, the accuracy of location in EKF is not as good as MEKF, because the overall distribution is obviously not as uniform as MEKF.

Localization result of three different methods.
As illustrated in Figure 7(a), for the users 1–3, computed to Tri, the average location error obtained by the location method MEKF is reduced by 40.8%, 21.2%, and 54.7%, respectively. Computed to EKF, the average location error is reduced by 53.9%, 18.8%, and 20.4%, respectively. As shown in Figure 7(b), for users 1–3, computed to Tri, the maximum location error obtained by the MEKF is reduced by 30%, 10%, and 58.3%, respectively, while reduced by 22.2%, 33.3%, and 23.1%, respectively, compared to EKF. As shown in Figure 7(c), for users 1–3, computed to Tri, the location error variance obtained by the location method MEKF is reduced by 10.5%, 15.4%, and 62.5%, respectively. Compared with the location error variance obtained by the EKF method, MEKF is reduced by 19%, 48.8%, and 20%, respectively.

Localization result of three different methods: (a) average localization error of different nodes, (b) maximum localization error of different nodes, and (c) variance of localization error of different nodes.
Figure 8(a) shows the relationship between the data loss rate and the average location error. In the experiment, we tested a change when the packet loss rate was 0%–10% by deleting some received packet; we artificially removed some of the localization signal in a random way to simulate the data loss. In Figure 8, we can clearly see that regardless of user 1, user 2, and user3, the average location error of MEKF is smaller than EKF when the packet loss rate is different. The reason is also because of the missing part of the information and our algorithm can use the node that has been located to assist in locating other nodes. These results further validate the effectiveness of our method in a mobile environment with a high data loss rate.
Figure 8(b) and (c) illustrates the variation of the average location error when the prediction error Q and the measurement error R change, respectively. In the initial stage, when Q decreases, the average error decreases gradually. When Q sets to

Localization result of EKF and MEKF: (a) data lost versus average location error; (b) Q versus average location error; and (c) R versus average location error.
The above results show that the proposed MEKF method can achieve higher accuracy location than the traditional algorithm, and it can harvest more stable location effect. The reason is that the selected mobile users are regarded as a whole to utilize the communication information among all nodes to improve the localization accuracy. In addition, the MEKF can also reduce the influence of noise in the environment.
Conclusion
In this article, we proposed a method for improving the localization performance of mobile group users. First, in order to meet the high localization precision and dependability requirement in some scenarios, the selected mobile users are regarded as a whole to utilize the communication information among them to improve the localization accuracy. Second, this localization method was designed by extending the Kalman filter to alleviate the influence of noise in the environment, which further improves the localization accuracy. Finally, we designed a real system based on the CC2530 localization node and validated the proposed algorithm by extensive real-world experiments. The experimental results showed that the localization accuracy can be improved significantly about 30%, which can be used as an effective option for indoor wireless location.
Footnotes
Handling Editor: Xiaoming Fu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by grants from the National Natural Science Foundation of China (NSFC) under Grant No. 61872154, No. 61772148 and No. 61672441; Natural Science Foundation of Fujian Province of China (No. 2018J01092); and Social Science Foundation of Fujian Province of China (No. FJ2018B038) and Subsidized Project for Postgraduates’ Innovative Fund in Scientific Research of Huaqiao University (No. 17013083005).