
Abstract
The concept of dynamic balancing with respect to a given trajectory is proposed in this paper. Trajectory-based dynamic balancing is a technique that brings additional mechanisms to unbalanced mechanisms with the purpose of actuating the original mechanism to move along a predefined trajectory, regardless of the shaking forces and moments. In this work, a planar three degrees of freedom (3-DOF) serial-parallel mechanism is proposed to implement this technique on an unbalanced platform. The overall structure of the system is firstly introduced and the mechanical design and kinematics of the proposed mechanism is then presented. The dynamic model of the mechanism and the platform is derived and analysed. Finally, numerical examples are presented to verify the effectiveness of the active dynamic balancing mechanism and the improved dynamic performance of the system.
Keywords
1. Introduction
In engineering practices, the actuation forces and moments of machines are prone to be influenced by the shaking forces and shaking moments, resulting in perturbations of the motions of the moving parts. Furthermore, shaking forces and moments also cause fatigue, vibrations, noise disturbances, etc., thus undermining the control precision [1]. Therefore, many balancing mechanisms with low additions of mass, inertia and complexity have been proposed to counterbalance the shaking forces and moments [2–9].
A mechanism is said to be dynamic balanced if, for any motions of the mechanism, the summation of all dynamic reaction forces (the shaking forces) and the summation of all dynamic reaction moments (the shaking moments) are zero. Equivalently, its linear momentum and angular momentum are constants at any instant [10]. Dynamic balancing usually renders a robotic mechanism many advantages such as reduced wear, improved accuracy and so on. Intuitively, there are two ways for dynamic balancing: passive and active. Passive balancing is completely determined by the mechanical design and no computer control is involved, while the active balancing utilizes a controlled system to coordinate the motions of the balancing elements. Compared with passive dynamic balancing, the major advantage of active balancing lies in its adaptability. That is, with appropriate control schemes, it is possible to deal with changes of the mass and inertia parameters. Such cases might happen when the payloads or tools are variable.
Active dynamic balancing has been studied for two decades [11–14]. Additional links, gears, dyads or more complex devices have been used for the balancing task [15]. In 1986, Z. Huang and Z.D. Shi showed that the shaking moment and torque can be simultaneously eliminated by an active control of a mechanism which consists of three balancing discs [16]. On this basis, in 1992 Konchev arrived at a new concept of elimination of overall reaction moment with an actively driven single balancer [17]. In 1995, Thuemmel presented an active control with redundant drives for the implication to moment balancing [18]. A complex active dynamic balancer was mentioned by Tarcisio in 2004 [19]. It was composed of two individual movable controllable compensation inertias and one rotor connected with two other compensation inertias on a two degrees of freedom (2-DOF) planar mechanism. In recent years, Volkert van Wjik and Herder designed an active dynamic balancing unit which was applied to an XY-robot [20]. Counter-rotary counterweights were used for dynamic balancing of the spatial parallel manipulator CaPaMan-2 [21]. The balancing unit was composed of a rotating disc, which was referred to as the counter-rotary counter-mass. Meanwhile, an active controlled disk with bevel gears and ball screw was implemented for actively balancing the mechanical vibrations in rotor-bearing systems as mentioned in [22].
All the aforementioned active dynamic balancers were designed to maintain the machine in a steady state at all times, so it can be addressed as the dynamic balancing with respect to equilibrium. However, from a more general and broader point of view, since the balancing mechanism can generate forces and moments, it can potentially be exploited, through appropriate design, not only to balance the resultant forces and moments, but also to control certain motions of the overall mechanism.
Therefore, an active dynamic balancing mechanism (ADBM) can be designed to produce adequate forces and moments which counteract the adverse effects of the net shaking forces and moments, and meanwhile actuate the platform to track a predefined dynamic trajectory. This new concept could be termed as the dynamic balancing with respect to a given trajectory. Compared with the traditional concept of dynamic balancing with respect to equilibrium, the overall reaction forces or moments are not necessarily zero and the ADBM functions as both the balancer and the controller.
In this paper, a 3-DOF serial-parallel mechanism with simple structure and control, and low moving inertia is proposed as a case study on the ADBM with respect to a trajectory. The paper is organized as follows: the overall configuration of the mechanism is presented firstly and followed by the modelling of the ADBM. Using inverse dynamics, all actuation and reaction forces and moments of the ADBM are calculated based on the Newton-Euler approach. Finally, numerical examples are presented to validate the effectiveness of the mechanism under study.
2. Motivation and Concept of the 3-DOF ADBM
In this paper, the platform is assumed to be a planar mechanism with 3-DOF. Correspondingly, two independent shaking forces (along the x- and y- axes) and one independent shaking moment with the direction perpendicular to the plane exist. Therefore, the ADBM must also be designed to be of 3-DOF.
Considering the prerequisite that the directions of balancing forces and moments should be consistent with the shaking forces and moments, the ADBM is thus designed with a planar configuration, and it is installed such that its xy-plane is parallel to the moving plane of the platform. For convenience of analysis, it is assumed that the ADBM can be mounted on the platform at any location and at any orientation.
The concept of the ADBM is demonstrated in Figure 1. The mechanical system consists of the platform with unbalanced rotating elements (represented together as the red box) and the ADBM mounted on the platform (represented as the blue box). The shaking forces and shaking moments are generated by the unbalanced rotating elements of the platform. The summation of all these shaking forces and moments results in the net shaking forces and moments as indicated by the green arrows. Through dynamic coupling effects, the ADBM is able to apply forces and moments (blue arrows) back to the platform, thus balancing the net shaking forces and moments, and simultaneously actuating the platform to move along a trajectory.
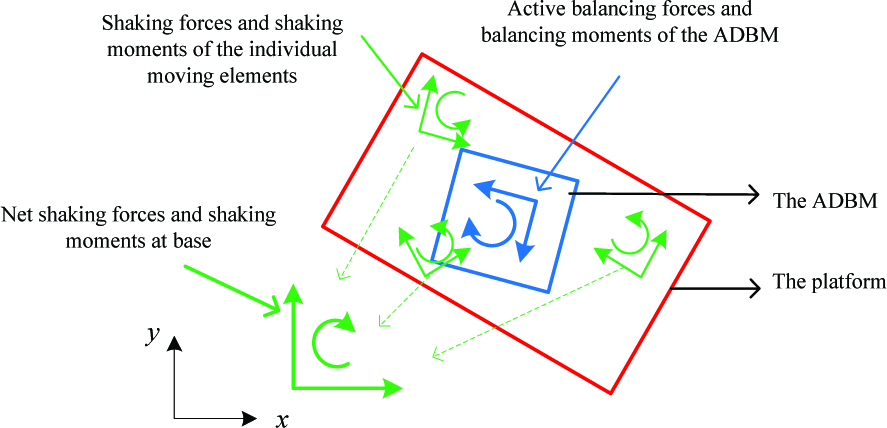
The mechanical system of the platform and the ADBM
As illustrated in Figure 1, the platform and its unbalanced rotating elements are represented jointly with the red box. Under such circumstances, the unbalanced platform endure the net shaking forces and the net shaking moments caused by the summation of the individual rotating elements. This influence usually results in system instability and vibrations. The major function of the ADBM on the platform is to counterbalance the net shaking forces and net shaking moments, especially when there are lots of individual rotating elements on the platform. Additionally, the ADBM also generates additional forces and moments to actuate the platform. Therefore, with appropriate actuation forces and moments, the ADBM could realize the dynamic balancing of the platform with respect to a given trajectory.
3. Design and Kinematics of the ADBM
As discussed in the last section, the platform is influenced by the shaking forces and moments. The shaking forces could be eliminated by adding a counter-mass. Similarly, the shaking moments can be moment-balanced by a single actively driven counter-rotating element [23]. Therefore, a counter-rotary counter-mass (CRCM) mechanism is adopted in the design of the ADBM. As illustrated in Figure 2, the ADBM is composed of a CRCM which is mounted on a planar two-branch-prismatic-revolute-revolute (2-PRR) parallel mechanism.

Kinematic configuration of the ADBM
The CRCM is designed as a disc which rotates perpendicular to the xy-plane and is fixed on the end-effector of the planar 2-PRR parallel mechanism. The 2-PRR mechanism functions as the positioner of the disc. It consists of two inextensible limbs, AiBi for i=2 and 3. One end of each limb is connected to the disc by a revolute joint, while the other end is connected to the platform by a prismatic joint. Using the two prismatic joints as the input links, the CRCM can be positioned anywhere within its workspace in the xy-plane.
The rotational DOF of the disc in association with the 2 translational DOF of the 2-PRR mechanism make sure that the ADBM satisfies the prerequisites in Sec. 2. Now the ADBM is designed as a 3-DOF planar serial-parallel mechanism and it is thus able to generate the necessary balancing forces and moments to the platform.
As shown in Figure 2, Mj, lj, and rj are the mass, length and position of centre of gravity of the link j, j = 2 and 3. M1 and l1 are the mass and moment of inertia of the disc. The net mass MAM, moment of inertia IAM and position of centre of the net mass CAM of the ADBM can be expressed as follows:



where the position is measured with respect to the moving reference frame attached to the platform, whose origin is fixed at point O.
The position of the centre of gravity (c.g.) of the disc could be expressed as follows:


where s1and s2 are the input variables of the two prismatic joints, and h is the distance between the two sliding tracks of the prismatic joints. With the position of the disc obtained, the positions of the c.g. of the two links


Now the positions of the disk and links are determined by the input variables s1 and s2. Then the position of the centre of the net mass of the ADBM and the net inertia of moment can also be obtained through Eq. (3) and Eq. (2).
4. Dynamics Analysis
The 3-DOF ADBM is installed on the unbalanced platform. The state of the platform can be determined through dynamics analysis of the entire system. All the forces and moments applied to the system are illustrated in Figure 3. In this figure, point Q and point O denote the origins of the inertial frame and the moving platform frame. φpf represents the rotation angle of the platform with respect to the inertial frame, and φ represents the polar angle of the ADBM-fixed frame B with respect to the platform frame O. The ADBM is mounted on the platform and its relative motions with respect to the moving platform can also be expressed in inertial frame Q.
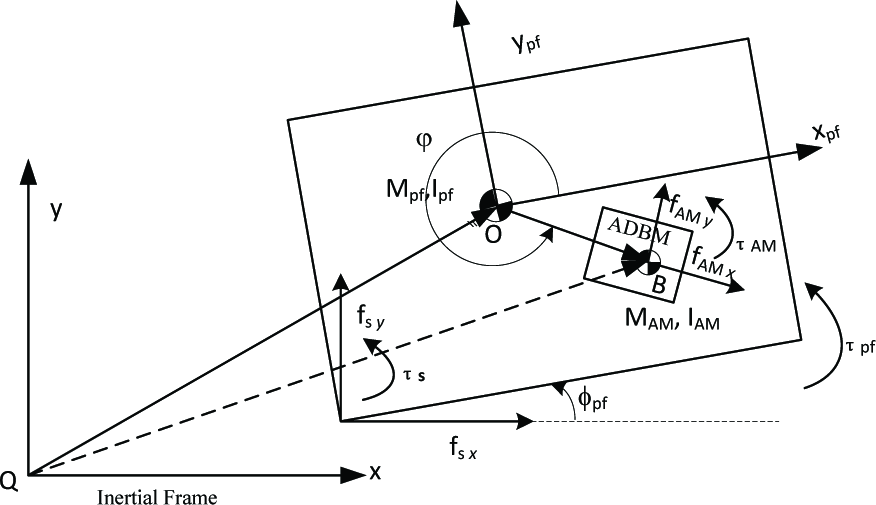
Forces and moments acting on the machine
Since the actuation forces and moments are dependent on the state variables of a system, the inverse dynamics of a system can be determined when its motion trajectory is specified. The dynamics of the whole mechanical system should include three parts: the motion of the rotating elements, the active balancing of the ADBM and the resultant motion of the platform along a given trajectory. First, the forces and moments acting on the platform are analysed. Based the kinetics of the platform, the reaction forces and moments due to individual rotating elements and the ADBM must be considered. For simplicity, each unbalanced element is approximately modelled as a 1-DOF rotating link. Let fs and τ s denote the summation of the shaking forces and shaking moments, namely:


where


According to Eq. (10) and (11), the state of the platform will change as the motion of the rotating elements varies. Traditionally, if dynamic balancing is implemented with respect to equilibrium, then the linear and angular accelerations of the platform should be minimized towards zero. However, if dynamic balancing is performed with respect to a given trajectory, the involvement of the ADBM becomes a must.
Supposing the force and moment of the platform are denoted respectively as


where


where ü
AM
is the position acceleration of the centre of mass of the ADBM that is mounted on the platform and measured with respect to the ground. The corresponding position vector

where

Therefore, ü AM can be obtained by taking the second derivative of Eq. (16) with respect to time:

where

The first term in Eq. (17) is contributed by the linear acceleration of O relative to the ground, the second term is contributed by the relative motion of the ADBM with respect to the platform and the rest is contributed by the rotation of the platform with respect to the inertial frame.
According to these aforementioned equations, the adjusted acceleration of the balancing platform can be obtained as follows:

Eq. (18) and (19) imply that once the input variables of the ADBM are given, the motion state and the trajectory can be determined. Therefore, through the inverse kinematics, it is easy to obtain the input variables of actuators when giving the desired trajectory of the platform. In the next section, numerical examples are presented to verify the feasibility of the ADBM in the active dynamic balancing with respect to a given trajectory.
5. Numerical Examples
In this section, simulations by MAPLETM are presented in order to validate the feasibility of the ADBM proposed in this paper. The simulation of traditional dynamic balancing with respect to equilibrium is firstly performed in order to demonstrate the fundamental functionality of the ADBM. Furthermore, these results are used to compare with those of the dynamic balancing with respect to a given trajectory. As a summary, the platform can be dynamically balanced with respect to either equilibrium or a given trajectory in the presence of different external shaking forces and shaking moments. The effectiveness and reliability of the ADBM are thus validated.
In these simulations, the input functions of the shaking forces and moments are first given in Table 1 and the three different trajectories of the platform are respectively prescribed in Table 2. The trajectories of the platform in Case A are designed to verify the active dynamic balancing with respect to equilibrium, so the kinematic states are correspondingly set to be zeros. In Case B, a different set of trajectories are defined as the given trajectories of the dynamic balancing. Since the stochastic periodic motions of the platform can be decomposed into a series of trigonometric functions using Fourier transformation, the trajectories of the platform are formulated using sinusoidal functions. Additionally, to test the anti-interference performance and reliability of the ADBM, the platform is required to track the original trajectories when various shaking forces and shaking moments are both presented. Therefore, extra disturbance terms are involved in the overall reaction forces and moments of the shaking elements in Case C of Table 1, while the predefined trajectories of the platform in Case C in Table 2 are actually the same as those of Case B.
Three cases of the total acting force and moment of all the rotating elements

Three cases of predefined trajectories of the platform

In all cases, the design values of the mass and moment of inertia of the platform are chosen as: Mpl=4.0 kg, Ipl=0.006 kg.m2. As for the ADBM, because the mass of the links and their inertia of moment are negligible, its mass and moment of inertia are assumed to be equal to that of the disc, namely: MAM =M1=2.5 kg, IAM =1/2*M1*r12=0.003125 kg.m2. Besides, in order to simplify the inverse kinematics, the lengths of the two links are supposed to be equivalent: l1= l2=0.2m. It is also assumed that the distance between the two sliding tracks of the prismatic joints h=0.3m.
The simulations consist of two parts. Firstly, the platform of the mechanism is supposed to be subjected to the external shaking forces and shaking moments as shown in Table 2. Simultaneously, the mechanism is actuated to track the prescribed trajectory as shown in Table 1. The control variables of the ADBM are calculated to demonstrate the practical applicability of this mechanical device. Secondly, the computed control variables are used to calculate the actual linear acceleration and angular acceleration of the disc of the ADBM; then the actual force and moment applied by the ADBM on the base of the platform are computed. These actual forces and moments are then compared with those computed desired forces and moments in order to validate the model.
(1) The calculation of control variables
Since the position of the disc of the ADBM is constrained by the sliders which are free to slide on their rails attached to the platform, the acceleration control of the disc of the ADBM is achieved by the control of the motions of the moving sliders. That means that the desired rotational acceleration of the disc and the desired translational acceleration of the prismatic joints with respect to the platform are the control variables of the system. In order to obtain these desired relative accelerations, a feedback control (e.g., PID control) with a relative acceleration measurement can be used. The drawback of the acceleration control method however, is that the measured acceleration is noisy. Actually, it is more practical to use the velocity or position control to render the desired accelerations. Therefore, the position control with the integration technique is implemented here. The discrete desired displacement/angle position to render the desired linear acceleration/angular acceleration can be obtained by first and second integration, namely:


where K in the time step, Ts is the sampling period and S̈i, ṠiSi are respectively the desired position, velocity and acceleration of the translational prismatic joints or the rotational disc.
According to the above-mentioned method, the displacements of two prismatic joints and the orientation angle of the disc under the three cases A, B and C are respectively calculated. The results are shown in Fig. 4.

Displacements of the two prismatic joints and orientation angle of the rotary disc of the ADBM. Case A: dynamic balancing with respect to equilibrium, Case B: dynamic balancing with respect to given trajectories, Case C: dynamic balancing with respect to given trajectories when disturbances are involved into the shaking forces and shaking moments.
When the actual displacements of two prismatic joints and the orientation angle of the disc are known, the motion trajectory of the disc can be obtained. Then the disc can be actuated in reaction to the shaking forces and shaking moments such that the resultant forces and resultant moments applied on the platform are modified in order to make the platform dynamically balanced with respect to a given trajectory.
(2) The effectiveness of the ADBM
Simulations are then performed in order to validate the functionality of the ADBM. In these simulations, the actual translational acceleration and rotational acceleration of the ADBM can be calculated according to actual displacements of the two sliders and rotational angle of the disc of the ADBM. Fig. 5 presents the results respectively obtained under Cases A, B and C. The acceleration trajectories of the disc of the ADBM are also recorded.
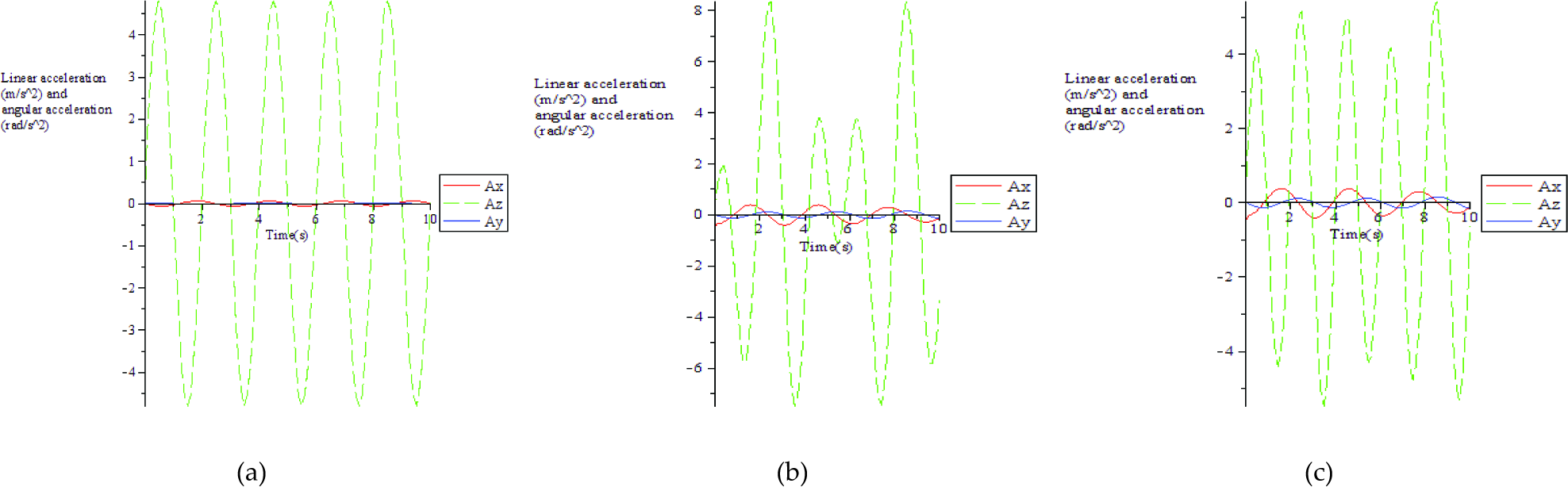
The actual translational acceleration and rotational acceleration of the ADBM under three different cases A, B and C. Ax presents the translational acceleration of disc of the ADBM in x-direction with respect to the inertial frame, Ay presents the translational acceleration of disc of the ADBM in y-direction with respect to the inertial frame, Az denotes the rotational acceleration of disc of the ADBM. (a) The actual accelerations of the ADBM under Case A. (b) The actual accelerations of the ADBM under Case B. (c) The actual accelerations of the ADBM under Case C.
Then the summation of the shaking forces and shaking moments exerted on the platform, and the computed desired resultant external forces and moments which drive the platform to move along the given trajectory are calculated. Then these forces and moments are compared with the actual forces and the actual moments that are generated by the ADBM. The results of the comparison are shown in Fig. 6. It can be observed that the curves of the actual forces and moments applied by the ADBM are almost consistent with those of the desired driving forces and moments of the system.

The actual and desired forces and moments applied by the ADBM on the platform under three different cases A, B and C. Famx, Famy and Mam respectively present the actual force in x-direction, the actual force in y-direction and the actual moment produced by the ADBM. In addition, Fsy, Fsx and Ms in Case A respectively present the shaking forces and shaking moment applied on the base of the platform. In Case B and Case C, there are: Fx=Fsx+Mpf.
6. Discussion
Fig. 6 presents the curves of the actual forces and actual moments produced by the ADBM and the desired forces and moment that maintain the platform's dynamic balancing with respect to the different trajectories under Case A, Case B and Case C. In these three cases, the actual curves are almost consistent with the computed ones.
From Figure 6(a), which shows the results of Case A, the forces in x and y directions and the moment applied by the ADBM on the platform are almost equal to the shaking forces and shaking moments applied on the base of the platform. Therefore, the resultant forces and moments applied on the base of the platform are equal to zero. That means that the platform can be dynamically balanced with respect to equilibrium with the effect of the ADBM. Therefore, the effectiveness of the ADBM is primarily validated.
As for Case B, the curves of the forces and moments applied by the ADBM coincide with the summation of shaking forces and shaking moment, and the desired actuate forces and actuate moment for the ADBM. Therefore, the ADBM can counteract the adverse effects of the net shaking forces and moments, and meanwhile actuate the platform to track a predefined dynamic trajectory. So the dynamic balancing with respect to the given trajectory is therefore validated.
Finally, when extra disturbances are involved in the shaking forces and shaking moments in Case C, the forces and moments produced by the ADBM can not only balance the resultant shaking forces and shaking moments, they can also actuate the platform to track the same dynamic trajectory as those of Case B. The results demonstrate that the predefined trajectories can still be achieved in spite of variations being involved in the shaking elements. In summary, the 3-DOF planar ADBM proposed in this paper is able to realize the dynamic balancing of the platform with respect to equilibrium or a given trajectory and it can also resist certain disturbances.
7. Conclusion and Future Research
In this paper, the active dynamic balancing with respect to a given trajectory is addressed, which is a more general study compared with previous research on active balancing with respect to equilibrium. A 3-DOF active dynamic balancing mechanism with serial-parallel configuration is designed to validate this concept. The configuration of the system, including the unbalancing platform as well as the ADBM, is introduced firstly. Then the kinematic and dynamic modelling of the ADBM is presented. The forces and moments analysis on the whole mechanical system is developed. Finally, simulations are presented to demonstrate the effectiveness of the ADBM.
The results indicate that the ADBM can not only achieve dynamic balancing of the platform, it can also actuate the platform to track a predefined trajectory.
Future work primarily includes the refinement of the dynamic model by considering more links and the closed-loop feedback tracking control of the mechanism in a bid to improve the motion accuracy. Other research may include the study on spatial multi-DOF mechanisms for dynamic balancing. In particular, disk-like structures or spherical mechanisms will be considered for the trajectory-based active dynamic balancing of unbalanced mechanisms.
Footnotes
8. Acknowledgements
This work was supported by the National Natural Science Foundation of China (grant no. 50905176 and grant no. 60875069).