
Abstract
This paper presents a discrete-time decentralized control scheme for trajectory tracking of a two degrees of freedom (DOF) robot manipulator. A high order neural network (HONN) is used to approximate a decentralized control law designed by the backstepping technique as applied to a block strict feedback form (BSFF). The weights for each neural network are adapted online by an extended Kalman filter training algorithm. The motion for each joint is controlled independently using only local angular position and velocity measurements. The stability analysis for the closed-loop system via the Lyapunov approach is included. Finally, the real-time results show the feasibility of the proposed control scheme using a robot manipulator.
1. Introduction
Robotic arm control has become a significant research area for different applications due to the relevancy that they have acquired in performing tasks classified as dangerous or which require higher accuracy. In this context, different control schemes have been proposed to guarantee efficient trajectory tracking and stability [1, 2]. Fast advances in computational technology offer different possibilities for implementing control algorithms within the approach of a centralized control design [3]. However, it is a great challenge to obtain an efficient control for these systems, due to their highly nonlinear complex dynamics with strong interconnections, parameters which are difficult to measure and unmodelled dynamics. Considering only the most important terms on the mathematical model, control algorithms with a great number of mathematical operations are required, which affect real-time implementation feasibility.
In [4], the authors present a control approach based on open-loop optimization using a genealogical decision tree (GDT), which can be used for solving both tracking and regulation. A novel task-space robust control approach with suitable tracking performance under imperfect transformation is presented in [5]; the proposed control law is derived based on Lyapunov's direct method to guarantee stability in the presence of both structured and unstructured uncertainties. On the other hand, within the area of control systems theory, for more than three decades, an alternative approach has been developed considering a global system as a set of interconnected subsystems, for which it is possible to design independent controllers, considering only local variables to each subsystem: decentralized control [6, 7]. This type of control has been applied in robotics, mainly in cooperative multiple mobile robots and robot manipulators, where it is natural to consider each mobile robot or each manipulator as a subsystem of the whole system. For robot manipulators, each joint and the respective link is considered as a subsystem in order to develop local controllers, which consider only local angular position and angular velocity measurements, and compensate for interconnections effects, usually assumed as disturbances. The resulting controllers are easily implemented for real-time applications [8]. In [9], a decentralized control for robot manipulators is developed, decoupling the dynamic model of the manipulator in a set of linear subsystems with uncertainties and simulations for a two joint robot are included.
In [10], a decentralized control for robot manipulators is reported; it is based on the estimation of each joint dynamics using feedforward neural networks. A decentralized control scheme, on the basis of a recurrent neural identifier and the block control structure, is shown in [11]. This approach was tested only via simulation, with a two degrees of freedom robot manipulator, and with an Articulated Nimble Adaptable Trunk (ANAT) manipulator, with seven degrees of freedom. In [12], the authors propose a robust adaptive decentralized control algorithm for trajectory tracking of robot manipulators. The controller, which consists of a Proportional plus Derivative (PD) feedback part and a dynamic compensation part, is designed based on the Lyapunov methodology.
In recent literature about adaptive and robust control, numerous approaches have been proposed for the design of nonlinear control systems. Among these, adaptive backstepping constitutes a major design methodology [13]. The idea behind the backstepping approach is that some appropriate functions of state variables are selected recursively as virtual control inputs for lower dimension subsystems of the overall system. Each backstepping stage results in a new virtual control design from the preceding design stages; when the procedure ends, a feedback design for the true control input results, which achieves the original design objective.
In this paper, the authors present a decentralized neural backstepping approach in order to design a suitable controller for each subsystem. Afterwards, each local controller is approximated by a high order neural network (HONN) [14]. The neural network learning is performed online by means of an extended Kalman filter (EKF) [15] and the controllers are designed for each joint, using only local angular position and velocity measurements. Real-time results for the proposed scheme using a two DOF robot manipulator are presented.
2. Discrete-time decentralized systems
Let consider a class of discrete-time nonlinear perturbed and interconnected system which can be presented in the block strict feedback form (BSFF) [13] consisting of r blocks

where

where
3. High-order neural networks (HONN)
This section described some preliminaries about discrete-time high order neural networks (HONN) and extended Kalman filter algorithm (EKF).
3.1 Discrete-time HONNs
Considering the HONN described by

where

For a desired function

where

as the estimation error.
3.2 Extended Kalman filter algorithm
It is known that Kalman filtering (KF) estimates the state of a linear system with additive state and output white noises [18]. For KF-based NN training, the network weights become the states to be estimated. In this case, the error between the NN output and the measured plant output can be considered as additive white noise. Because NN mapping is nonlinear, an EKF-type is required. The training goal is to find the optimal weight values wij(k) which minimize the prediction error. We use an EKF-based training algorithm described by:

where P∈ℜ LxL is the prediction error covariance matrix, w∈ℜ L is the weight (state) vector, η is a design parameter such that 0 ≤ η ≤ 1, L is the respective number of NN weights, x∈ℜ m is the measured plant state, x̂∈ℜ m is the NN output, K∈ℜ Lxm is the Kalman gain matrix, Q∈ℜ LxL is the state noise associated covariance matrix, R∈ℜ mxm is the measurement noise associated covariance matrix and H∈ℜ mxm is a matrix, for which each entry (Hij) is the derivative of one of the NN output (x̂C j ), with respect to one NN weight (wj), as follows

where i=1,…,m and j=1,…, L. Usually P and Q are initialized as diagonal matrices, with entries P(0) and Q(0), respectively. It is important to remark that H(k), K(k) and P(k) for the EKF are bounded [18].
4. Controller design
The model of many practical nonlinear systems can be expressed in (or transformed into) a special state-space form named the block strict feedback form (BSFF) [13] as follows:

where

where Fij(·) and Gij(·) are unknown smooth functions of fij(x̄ji(k)) and gij(gji(x̄ j i (k)) respectively. To simplify the analysis, let us define 1 ≤ j ≤ r−1.
The objective is to design a control ui(k) to force the system output χ i (k) to follow a desired trajectory xid(k). Once (10) is defined, we apply the well-known backstepping technique [13]. For system (10), we can define the desired virtual controls (αj*(k), j = 1,…,r−1) and the ideal practical control (u*(k)) as follows:

φ j i (γ) with 1 ≤ j ≤ r are nonlinear smooth functions. It is obvious that the desired virtual controls α* i (k) and the ideal control ui*(k) will drive the output χ*i(k) to track the desired signal x*id(k) only if the exact system model is known and there are no unknown disturbances. However, in practical applications, these two conditions cannot be satisfied. In the following, neural networks will be used to approximate the desired virtual controls, as well as the desired practical control, when the conditions established above are not satisfied. As in [14], we construct the virtual and practical controls via backstepping without the causality contradiction [17]. Let us approximate the virtual controls and practical control by using the following HONN:
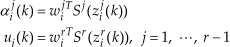
with
where wji∈ℜLj are the estimates of ideal constant weights wj* i and Sj∈ℜ Ljxnj with j = 1,…, r. Define the weight estimation error as

Using the ideal constant weights and according to [20], it follows that an HONN exists, which approximates the virtual controls and practical control with a minimum error, defined as

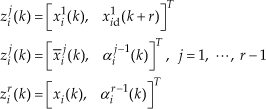
Then, the corresponding weights updating laws using an EKF are defined as

with

and

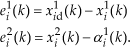
where vji(k)∈ℜnj is the desired signal and vji(k)∈ℜnj is the HONN function approximation defined, respectively as follows:

and

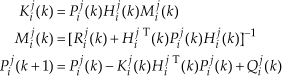
eij(k) denotes the error at each step as
The whole proposed decentralized neural backstepping control scheme is shown in Figure 1.

Decentralized neural backstepping control scheme
5. Two DOF robot manipulator application
This section presents the real-time application for a two DOF robot manipulator.
5.1 Robot manipulator description
In order to evaluate, via real-time implementation, the performance of the proposed control algorithm, we use a two DOF robot manipulator moving in the vertical plane as presented in Fig. 2. High-torque brushless direct-drive servos are used to drive the joints without gear reduction. The advantages of these types of direct-drive actuators include freedom from backlash and significantly lower joint friction compared to actuators with gear drives. The motors used in the experimental arm are models DM1200-A and DM1015-B from the Parker Compumotor company, for the shoulder and elbow joints, respectively.
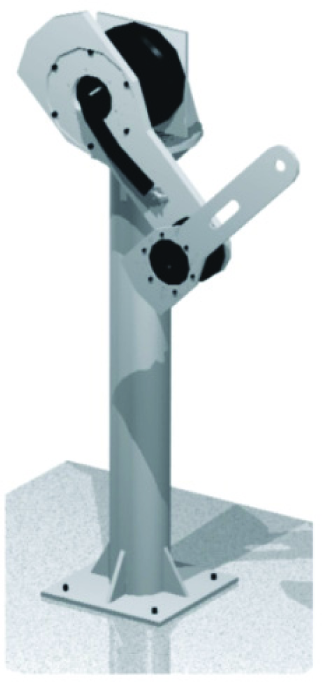
Robot manipulator
For this application, the servos are operated in “torque mode”, so the motors act as torque sources and accept an analogue voltage as a reference of torque signal. In this configuration, the motor DM1200-A is capable of delivering a maximum torque of 150 Nm and the motor DM1015-B only 15 Nm. Angular position information is obtained from incremental encoders located on the motors, which have a resolution of 1,024,000 pulses/rev for the first motor and 655,300 pulses/rev for the second (accuracy 0.0069 for both motors), and angular velocity information is obtained by numerical differentiation of the position signal. A motion control board DS1103, based on the TMS320C31 32-bit floating-point microprocessor from Texas Instruments, was used to run the control algorithms. This board is mounted in an IBM-compatible 486 66-MHz host computer, which provides an environment for program generation, compilation, loading data for plotting purposes and downloading programs for real-time execution. The control program is written in C programming language for the TMS320 compiler and executed in the control board at a 2.5 ms sampling rate. Moreover, a control interface with Matlab/Simulink and dSPACE Control Desk 2.3 was used in order to display all required signals. A detailed tutorial about operating and programming with Matlab/Simulink and Control Desk can be found in [21].
5.2 Control objective
Define the following states:
where χ11(k) and χ12(k) are the angular positions, χ21(k) and χ22(k) are the angular velocities, x11 d(k) and x22 d (k) are the desired trajectory signals, u1(k) and u2(k) represent the applied torque to joints 1 and 2, respectively. The control objective is to drive the output χ(k) to track the reference xd(k). Using (22), the discrete-time two DOF robot manipulator model can be represented in the BSFF, consisting of two blocks (r = 2) for each joint
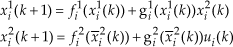
where x̄2 i 2(k) = [x1 i (k) xi2(k)] T , i = 1, 2 subsystems, fi1(x1 i (k)), g1 i (x1 i (k)), fi2(x̄ i 2(k)) and g2 i (x̄ i 2(k)) are assumed to be unknown. To this end, we use an HONN to approximate the desired virtual controls and the ideal practical control described as

The HONN proposed for this application is defined as follows:
with

The weights are updated using the EKF (15) - (21) with i = 1, 2 and
The training is performed online using a series-parallel configuration. All the NN states are initialized in a random way. The covariance matrices are initialized as diagonal and the nonzero elements are: Pi1 = Pi2 = 100, Qi1 = Qi2 = 1000 and Ri1 = R2 i = 1 × 1012, respectively. These values are heuristically selected.
In fact, the system model must be expressed in the block strict feedback form (BSFF) [13] before starting the designing. The electromechanical system considered in this paper is already in this form.
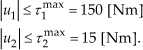
According to the actuator's manufacturer, the direct-drive motors are able to supply torques within the following bounds
5.3 Real-time results
For the experiments we select the following discrete-time trajectories

where b1=π/4, c1=Π/18, d1=−2.0 and ω1=5 [rad/s] are parameters of the desired position trajectory for the first joint, whereas b2=π/3, c2=25π/36, d2=−1.8 and ω2=1.0 [rad/s] are parameters of the desired position trajectory for the second joint. The sampling time is selected as T = 2.5 milliseconds.
These trajectories incorporate a sinusoidal term to evaluate the performance for relatively fast periodic signals, where the nonlinearities of the robot dynamics are really important; additionally, they include a term which smoothly grows for maintaining the robot in an operation state without saturating actuators.
The trajectory tracking results for decentralized neural backstepping (DNBS) control scheme are presented in Figs. 3 and 4. For the real system, the initial conditions are the same as those of the reference system, both restricted to be equal to zero according to the experimental prototype architecture, therefore, transient errors do not appear. The tracking error performance can be verified for joints 1 and 2 in Fig. 5. The applied torques to each joint are shown in Fig. 6.

Trajectory tracking for joint 1 x11d (k) (solid line) and χ11(k) (dashed line)

Trajectory tracking for joint 2 x12d (k) (solid line) and 2 x12d(k) (dashed line)
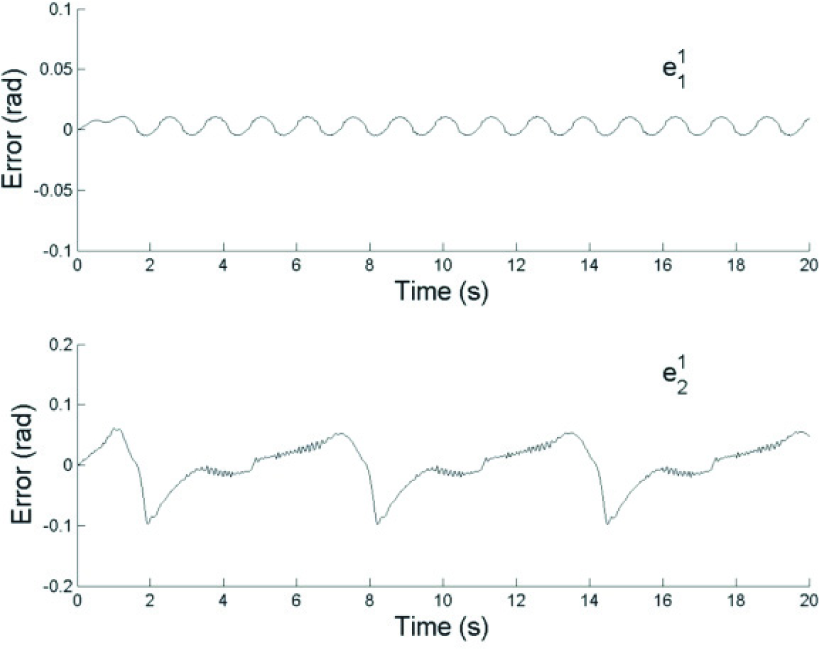
Tracking errors for joints 1 and 2

Applied torques to joints 1 and 2
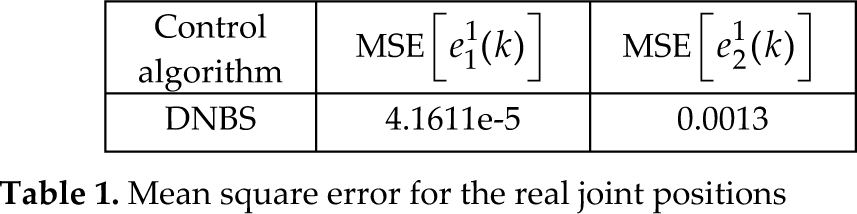
It is easy to see that both control signals are always inside the prescribed limits given by the actuator's manufacturer; that is, their absolute values are smaller than the bounds τ1max and τ2max, respectively. Time evolution of the position error e1 i reflects that the control system performance is very good. The performance criterion considered in this paper is the mean square error (MSE) value of the position error calculated as

where T is the sampling time and t = 20 seconds.
The respective mean square errors for the proposed scheme are included in Table 1. According to the mean square errors presented above, the proposed scheme based on the backstepping technique presents a good performance for trajectory tracking and reduced computational complexity.
Mean square error for the real joint positions
6. Stability analysis
Before proceeding to demonstrate the stability analysis to prove that the tracking error (21) is SGUUB, we need to establish the following lemmas.

with
Proof Using (18) and considering that v(k) do not depend on the HONN parameters, we obtain

Let us approximate (30) by

Substituting (17) and (30) in (31)

Let us define

then we have

Proof From (13) and (15) it is possible to write the dynamics of the weight estimation error as

Using (12), (14) and (17) system (35) can be written as

with j = 1,…,r and

It remains that the EKF algorithm is used only to train the neural network weights which become the states to be estimated by the EKF and the neural network approximation error vector ε zij is bounded (this is a well-known NN property [22]). Moreover, consider the boundedness of ε jz and S(zij(k)), then, by selecting η j i appropriately, Aji(k) satisfies |φ(k(1),k(0))|(k). By applying Lemma 1, w˜ j i (k) is bounded.
Theorem 1 For the i-th subsystem of (1) in the absence of interconnections, the i-th subsystem of HONN (12) trained with the EKF-based algorithm (16) to approximate i-th control law (11), ensures that the tracking error (21) is semiglobally uniformly ultimately bounded (SGUUB); moreover, the HONN weights remain bounded.
Proof For the following j-th (j = 1,…,r–1) equations of i-th subsystem in (1), with the virtual control αj* i (k) approximated by the i-th subsystem of HONN α j i (k) = wjTi SjT(k)(zij(k)) and e1 i (k) defined as in (19), consider the Lyapunov function candidate

whose first difference is


Let us define
From (21), then

where Δeji(k) is the error difference. Substituting (39) and (40) in (38) results in

From Lemma 1, substituting (34), we obtain

where γ j i = max‖H i jT (k)η i jKij (k)‖. From Lemma 2, it follows that w̄ j i (k) is bounded; then, there is η j i >0 such that

with κ j i defined as
where w̄ j i and K̄ j i are the upper bound of w̄ j i (k) and Kij(k), respectively [19]. From (43), it follows the boundedness of ΔV j i for k≥kT, that leads to the SGUUB of eij(k).
Theorem 2 For the i-th subsystem of (1) in the presence of interconnections, the i-th subsystem of HONN (12) with i=1,…,N;j = 1,…,ri trained with the EKF-based algorithm (16) to approximate the i-th control law (11), ensures that the tracking error (21) is semiglobally uniformly ultimately bounded (SGUUB); moreover, the HONN weights remain bounded.
Proof Let

substituting Δeij(k) ≤ -γjieij (k), we obtain

where γji = max‖H i jT (k)η i jKij (k)‖. From Lemma 2, it follows that w̄ j i is bounded; then, there is η j i such that

with κji defined as

where w̄ji and K̄ji are the upper bound of w̄ji(k) and Kij(k), respe ctiv ely [1 9]. From (44), i t follo ws the bounde dness of V(k) fo r k≥kT, that leads to the SGUUB of eij(k) ∀i = 1,…,N;j = 1,…,ri.
7. Conclusions
This paper presents a decentralized neural control scheme based on the backstepping technique. The control law for each joint is approximated by a high order neural network. The training of each neural network is performed online using an extended Kalman filter. The stability analysis proves that the tracking error is semiglobally uniformly ultimately bounded (SGUUB). Real-time results confirm the effectiveness of the proposed scheme for trajectory tracking when applied to a two DOF robot manipulator.
Footnotes
8. Acknowledgments
The authors thank to Universidad Autonoma del Carmen (UNACAR), Mexico. The first author thanks to Programa de Mejoramiento del Profesorado (PROMEP), Mexico, for supporting this research and Instituto Tecnológico de la Laguna (ITL), Mexico, for allowing us to use the two DOF robot manipulator and carry out the corresponding realtime application.