
Abstract
A novel 4-UPS-RPS spatial 5 degrees of freedom parallel mechanism is introduced and its dexterity measures are analysed. The stationary platform of the parallel mechanism is connected with the moving platform by the same four UPS (universal joints-prismatic pairs-spherical joints) driving links and a RPS (revolute joints-prismatic pairs-spherical joints) link. The velocity Jacobian matrix and the force Jacobian matrix of the parallel mechanism are derived, and the dimensionless velocity Jacobian matrix is established. On this basis, the three dexterity measures, including average conditional number, the smallest singular value and operation, are obtained. According to these, the square mean dexterity coefficient, which is used to comprehensively evaluate the dexterity of various configurations, is proposed. In addition, the distribution of different dexterity measures above in the workspace is analysed respectively. This research can provide an important theoretical base for the dimensional synthesis and trajectory planning for a parallel mechanism.
1. Introduction
The parallel mechanism, as a new type of mechanism, has recently been paid more attention and is being utilized for many practical applications due to its high stiffness, good dynamic performance, no accumulated precision errors and tight construction1.
The dexterity measures of a parallel mechanism are an important index for measuring the transmitting accuracy between the input and output motion (force), the evaluation of kinematics performance, dimensional synthesis and trajectory planning of a parallel mechanism. At present several researchers are studying the dexterity measures of parallel mechanisms2–7 and many achievements have been made. The relevant research include analytic study of local dexterity, closed form solution to the local dexterity and isotropy of parallel manipulators, dexterity index and its distribution, etc. However, the previous studies are oriented to one or a couple of dexterity measures8, which has limitations in addition to the fact that the comprehensive performance cannot be evaluated. Therefore, the question of how to expound effective dexterity measures and establish new comprehensive evaluation standards for performance is the key problem for this paper.
This paper takes the 4-UPS-RPS parallel mechanism (see Figure 1), which consists of a stationary platform, a moving platform, four UPS (universal joint-prismatic pair-spherical joint) actuating limbs, a RPS (revolution joints-prismatic pairs-spherical joints) actuating limb and a working head, as an example, and the Jacobian matrix is established. The distribution of dexterity measures, including average conditional number, the smallest singular value, operation and square mean dexterity coefficient are analysed.
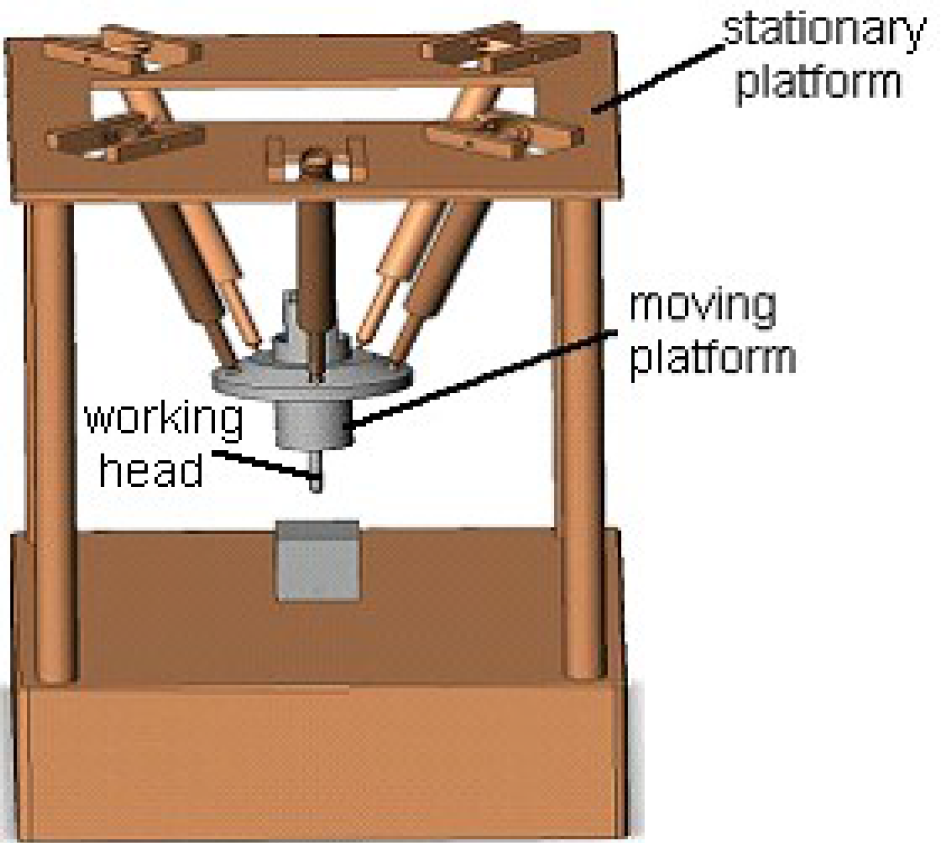
Structural diagram of parallel mechanism.
2. The Jacobian matrix of THE 4-UPS-RPS parallel Mechanism
The velocity Jacobian matrix and force Jacobian matrix are derived based on the following definition:
As shown in Fig. 2, AVbo is the linear velocity of the centre of the moving platform OB, Aωb is the angular velocity of the moving platform, ArSi is the vector radius of the joint Si from OB, AVsi is the linear velocity of joint Si, Ani is the unit vector of Li, L̇i is the length rate change of Li, Au1 is the unit vector of revolute pair T1, where i = 1,2,···15.

Velocity diagram of parallel mechanism.
Then the equation is obtained as follows

For the spherical joint S1, we can get

AVs1 in Au1 projection AVu1 = 0, so

From the RPS branch, we can get

Where JuA is constraint mapping matrix,

Then


Put the Equation (6) into Equation (7), we can get

For all the five actuated limbs, the relationship between the velocity of the moving platform and the velocity of the actuated limbs is given by

So the drive mapping matrix J1A can be expressed by

Combine Equation (4) with Equation (8), we can get

where J ∈ R6×6 called the velocity Jacobian matrix is the transfer matrix between driving velocity and six-dimension velocity of the moving platform.

From equation (12), we can get

where the Jacobian matrix [J−] ∈ R6×6 is the transfer matrix between six-dimension velocity of the moving platform and driving velocity.
The angular velocity of the moving platform ω is expressed by the differential coefficient with respect to time of the orientation parameter denoted with Z–Y–X Euler angles (α, β, γ) or
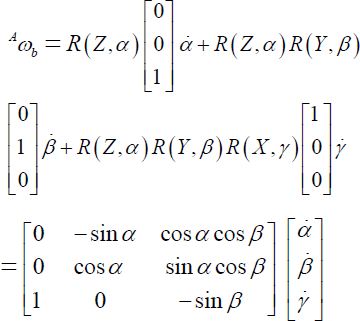
In the mechanism AZBO = 202 cos β cos γ, then
where

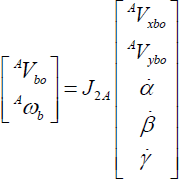
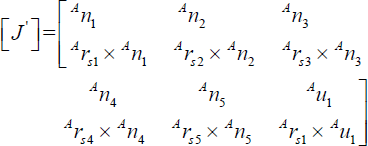
Put Equation (15) into Equation (9), so the Jacobian matrix J'A5×5, which describes the homogenous transformation between five actuated limbs and velocity of the moving platform, is given by

So the dimensionless velocity Jacobian matrix can be expressed by
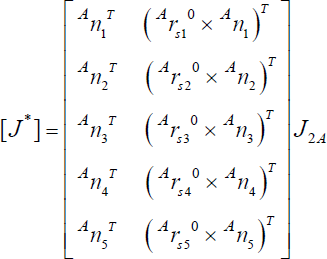
where Arsi0 = Arsi/R, R is the distribution radius of the spherical joint on the moving platform.
As is well-known, there is a dual relationship between the velocity Jacobian matrix and the force Jacobian matrix. So we can get the force transfer matrix by transposing the velocity transfer matrix J and the force transfer matrix [J'] is given by
3. The dexterity measures of THE 4-UPS-RPS parallel Mechanism
In the 4-UPS-RPS parallel mechanism, the distribution position angle of the universal joint on the stationary platform is 90°, the distribution position angle between the front revolution joint and the neighbouring universal joint on the stationary platform is 45°, the distribution position angle of the spherical joint on the moving platform is 72°. The distance between the front revolution joint and the centre point on the stationary platform is 717mm, the distribution radius of the spherical joints on the stationary platform is 645mm, the distribution radius of the spherical joint on the moving platform is 202mm.
3.1 The average conditional number
The average conditional number is given by

where
The bigger the 1/k, the better the dexterity. The distribution of the 1/k in Z=-50 and β = 15°, γ = 105° is shown in Figure 3. From Figure 3, the reciprocal of the average conditional number is varied with the variation of α and the supreme value of the 1/k in α = 0° is bigger than that in α = 15° and α = 25°.

The average conditional number in different α value.
3.2 The smallest singular value
In order to control the upper limit of velocity, the bigger the smallest singular value, the better the dexterity. The distribution of the smallest singular value in Z=-50 and β = 15°, γ = 105° is shown in Figure 4. From Figure 4, the smallest singular value is varied with the different α value and the supreme smallest singular value is less than 0.20.

The smallest singular in different α value.
3.3 The operation
The operation is given by

In order to avoid singularity, the bigger the operation value, the better the dexterity. The distribution of the operation in Z=-50 and β = 15°, γ = 105° is shown in Figure 5. From Figure 5, the operation is varied with the variation of α and the supreme value in α = 0° is bigger than that in α = 15° and α = 25°.

The operation in different α value.
3.4 The square mean dexterity coefficient
The square mean dexterity coefficient can be expressed by

From Equation (12), the bigger the square mean dexterity coefficient, the better the dexterity. The distribution of the square mean dexterity coefficient in Z=-50 and β = 15°, γ = 105° is shown in Figure 6. According to Figure 6, the square mean dexterity coefficient is varied with the different α value and the supreme square mean dexterity coefficient value is less than 20 – the dexterity in α = 0° is better than that in α = 15° and α = 25°.

The square mean dexterity coefficient in different α value.
4. conclusion
The dexterity analysis of the 4-UPS-RPS parallel mechanism is realized. The distribution of different dexterity measures, including average conditional number, the smallest singular value and operation, and the square mean dexterity coefficient are obtained. The simulation results can provide an important theoretical base for the dimensional synthesis and trajectory planning for a parallel mechanism.
Footnotes
5. Acknowledgments
This research is supported by the National Natural Science Foundation of China (grant no. 51005138), Shandong Young Scientists Award Fund (grant no. BS2012ZZ008), the Natural Science Foundation of Shandong Education Department of China (grant no. J09LD54), the Science Foundation of SUST (grant no. 2011KYJQ102).