
Abstract
Considering that the Jacobian matrix maps the velocity of the joint space of the robot to the end velocity of the Cartesian space, a novel topology optimization approach is proposed in this article for the design of three-translational degree-of-freedom spatial compliant mechanisms by combining the optimized Jacobian mapping matrix with the solid isotropic material with penalization topological method. First, by using the condition number method, the structural parameters of Universal-Prismatic-Universal (UPU)-type parallel prototype manipulator are optimized, and then, the differential Jacobian mapping matrix is calculated by using equivalent infinitesimal method. Second, comparing with the driver configuration and twist/wrench constraint conditions of the UPU-type parallel prototype manipulator, the topological algorithm combining solid isotropic material with penalization with optimized Jacobian mapping matrix is proposed. Finally, a novel spatial compliant mechanism with three-translational degree-of-freedom is derived, and numerical simulation results are reported to demonstrate the effectiveness of the proposed method.
Keywords
Introduction
In the past two decades, compliant mechanisms are widely used in precision engineering as they do not show problems such as clearance, friction, and wear. 1 In structural synthesis fields of compliant mechanism, the slender beam and flexible joints are usually applied for constructing the structure of complaint mechanism.2–4 These structural synthesis methods can make it convenient by using the pseudo-rigid-body method (PRBM) to establish the model of compliant mechanisms. To improve the overall stiffness of the compliant mechanism, the topology optimization approach has been used in its design. Parallel manipulators with multiple degrees-of-freedom (MDOF) are selected as a reference rigid body for topology optimization. Geometric constraint conditions are used to set the initial constraint conditions for the topology optimization, and then, the derived compliant mechanisms have the same motion characteristics as the referenced parallel manipulators. The above method is widely used in the structural synthesis of planar compliant parallel mechanism. For example, GZ Lum et al. 5 proposed an integrated design approach to synthesize MDOF flexure-based parallel mechanism, and topology optimization method is used to synthesize the compliant joints or limbs, and these optimal complaint joints are used to form the parallel limbs of the MDOF compliant parallel mechanism. G Wang et al. 6 proposed a multi-objective topology optimization method of combined load cases and constraints for a compliant parallel planar mechanism.
Based on screw/reciprocal theory, the constraint conditions can be defined by twist/wrench acted on the moving platform. 7 Compared with constraint conditions of parallel prototype manipulator with three pure translation degree-of-freedom (DOF), the initial constraint conditions of compliant mechanisms can be established by three wrenches which cross orthogonal to each other. B Jonathan and ML Hopkins 8 used freedom and constraint topology to synthesize concepts for MDOF parallel precision flexure system. Although the initial constraint conditions can ensure that the compliant mechanism has the same motion characteristics as the parallel prototype manipulator, the kinematics/dynamics model of the compliant mechanism cannot be built exactly, that is to say, the pseudo-rigid body of compliant mechanism is lacking.
The main feature of topological structure is hingeless (or hidden hinges), so it is important to find an exactly PRBM for the spatial compliant mechanism with a topological structure. To overcome this shortcoming, M Jin and colleagues9,10 proposed a Jacobian-based topology optimization method for compliant parallel mechanisms, and the Jacobian matrix and characteristic stiffness are optimized simultaneously to achieve kinematic and stiffness requirement. However, the motion transfer information may be implied again in the topological structure while the Jacobian matrix is optimized during topological processing. In our view, Jacobian matrix of parallel prototype manipulator should be optimized before the process of topology optimization to maintain the motion characteristics with the parallel prototype manipulator.
Jacobian matrix is the linear mapping of the kinematics or dynamics from driving joint space to the end-effector space, and it is only related to the size and the position of mechanism structure. Conventionally, Jacobian matrix is responded and changed with the configuration status. By optimizing the structural parameters of parallel manipulator, the optimized Jacobian matrix can be derived and is often used for the calculation of convergence and the optimization of workspace. In order to avoid the unit inconsistency problem in the conventional Jacobian matrix, S-G Kim and J Ryu 11 presented a new formulation of dimensionally homogeneous Jacobian matrix for parallel manipulators, and the condition number of the new Jacobian matrix is used to design an optimal architecture or pose of parallel manipulators for the best dexterity. The shape, size, and symmetry of the workspace is very dependent on the particular set of architectural parameters chosen for the mechanism; JA Carretero et al. 12 considered the condition number of the Jacobian matrix and the dexterous workspace, and studied the architecture optimization of a spatial 3-DOF parallel manipulator. The optimal Jacobian matrix of parallel manipulators has been studied in many literatures.13–16
For the structural synthesis of spatial compliant mechanism, if the displacement is smaller than the parameters of the structural configuration, then the Jacobian matrix can be assumed as the constant value matrix in the initial small neighborhood area. So the principle of equivalent infinity combined with differential transformation method can be used for the derivation of the Jacobian matrix of parallel prototype manipulator. For example, Wang et al. 17 adopted the vector continuous mapping Jacobian matrix for topology optimization of a 3-DOF peristaltic structure robot. By using elimination approach based on screw theory concepts such as twist, wrench, and reciprocity, A Campos et al. 18 established a systematic algorithm to analytically eliminate passive joint velocities and the Jacobian matrix is calculated.
Compared with multi-input and multi-output (MIMO) of parallel prototype manipulator, the singularity of driver configuration should be considered at the beginning of topology optimization process of spatial compliant mechanism. X Huo et al. 19 proposed a geometric algebra (GA)–based approach to determine the motions/constraints, mobility, and singularity of parallel mechanisms mainly utilizing the geometric and algebraic relations. H Yao et al. 20 presented a method based on GA for the singularity of 3-DOF redundant constraints of 3-Revolute-Prismatic-Revolute (3-RPR) planar parallel manipulators. Based on screw theory, L Kang et al., 21 and W Li and J Angeles 22 demonstrated the actuator redundancies and singularities, respectively. Another factor we should be considered is the topology optimization method with MIMO for spatial compliant mechanism. J Rong et al. 23 proposed a displacement constrained optimization approach for structural topology design under multiple load cases, and a series of topologies with clear profiles are derived. Three-dimensional (3D) topology optimization methods are proposed in literatures.24–26 Moreover, K Liu and A Tovar 27 proposed an efficient 3D topology optimization code written by MATLAB software. However, these topological methods are only intended to solve the structural optimization problem, not for mechanisms.
By using the method, combining the equivalent infinity approach with differential kinematic analysis method, the Jacobian matrix of parallel prototype manipulator with three-translational DOFs is derived after the structural parameters of parallel prototype manipulator are optimized. To realize the mechanisms, topology optimization, a novel topology optimization method, is proposed by combining the optimized Jacobian matrix with MIMO topology optimization.
The article is organized as follows. By using the condition number method, the structural parameters of Universal-Prismatic-Universal (UPU)-type parallel prototype manipulator are optimized, and the Jacobian mapping matrix is derived by using differential equivalent method in the “Optimization of structural parameters of three-translational parallel prototype manipulator” section. A novel topological algorithm combining the solid isotropic material with penalization (SIMP) with optimized Jacobian mapping matrix is proposed in the “Topology optimization model of three-translational DOF spatial compliant mechanism” section, and the topological model of spatial compliant mechanism with three-translational DOF is built. The micro- or nano-scale motion characteristics and vibration modal of the first four order are analyzed in the “Topological structure of three-translational DOF spatial compliant mechanism” and “Vibration modal analysis” sections, respectively. Concluding remarks are summarized in the “Conclusion” section.
Optimization of structural parameters of three-translational parallel prototype manipulator
Description of three-translational parallel prototype manipulator
Y Fang and L-W Tsai 28 presented a systematic analytical method based on the theory of screws for identification of limb structures of general and over-constrained 3-DOF translational parallel manipulators. A UPU-type parallel prototype manipulator is selected in this article, and its structure configuration is shown in Figure 1.

Three-UPU-type parallel prototype manipulator: (a) structure configuration model, (b) parameters with coordinate frame, and (c) limb structure.
Three-UPU-type parallel prototype manipulator is composed by a moving platform, fixed platform, and three symmetrical links. Each link is composed by a universal joint (U) which connected with the fixed platform, another universal joint (U) which connected with the moving platform, and an actuated prismatic joint (P) is used to connect the two universal joints. The
Optimization of structural parameters with Jacobian matrix
The general inverse kinematics of the proposed parallel prototype manipulator is expressed as

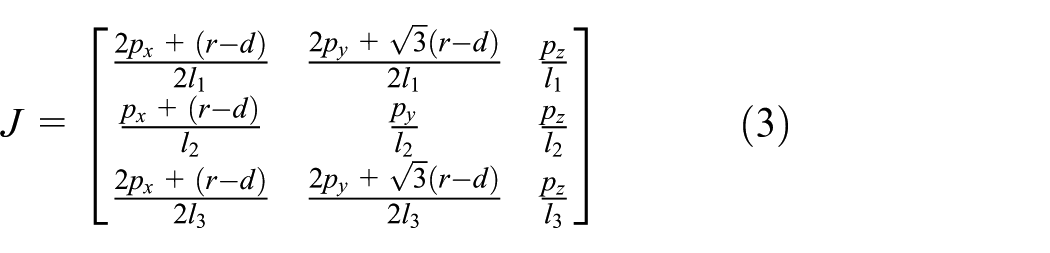
The relationship between the speed of joints and the end effector is partially derived as follows

where

Therefore, the Jacobian matrix of the proposed parallel prototype manipulator is derived as
The condition number is the maximum and minimum amplification coefficients between the platform velocity and joint velocity. The closer the maximum and minimum amplification coefficients, the more isotropic the manipulator is. In order to evaluate this closeness, the condition number, the ratio of the maximum and minimum singular value of Jacobian matrix, is denoted as

where
The manipulability is used to represent the amplifying ability of the manipulator between the platform velocity space and the joint velocity space, and it is considered as a measurement of the velocity amplification coefficient. The manipulability of the proposed parallel prototype manipulator is calculated as

The general objective function and bounds of the main dimensional variables are provided as follows

where
Equation (6) is subject to the parameters of proposed parallel prototype manipulator as follows

The optimization process is shown in Figure 2. Iteration at fifth step is convergence. After evolution of 36 generations, the optimal decision variable is obtained by

And then, the optimized Jacobian matrix can be given by


The optimization of manipulability and condition number of proposed parallel prototype manipulator with objective value and value of variable, respectively.
Topology optimization model of three-translational DOF spatial compliant mechanism
Three driving forces provided by Piezoelectric (PZT) actuators are denoted as initial input conditions, and they are transferred through elastic deformation (by stress and strain) to derive three-translational displacement outputs at the end effector. Moreover, the connect relationship between forces and displacements is the constitutive equation. To solve the constitutive equation, the finite element method is adopted. However, the solving process is very complex, and there have three problems that should be considered:
The couple between MIMO should be eliminated at the beginning of topology optimization.
To realize the mechanism topology, the proposed Jacobian matrix should be applied for topology optimization.
The singularity of actuators (initial input forces) should be avoided.
The nonsingular Jacobian matrix
The orthogonal matrix can be calculated by MATLAB software, which yields
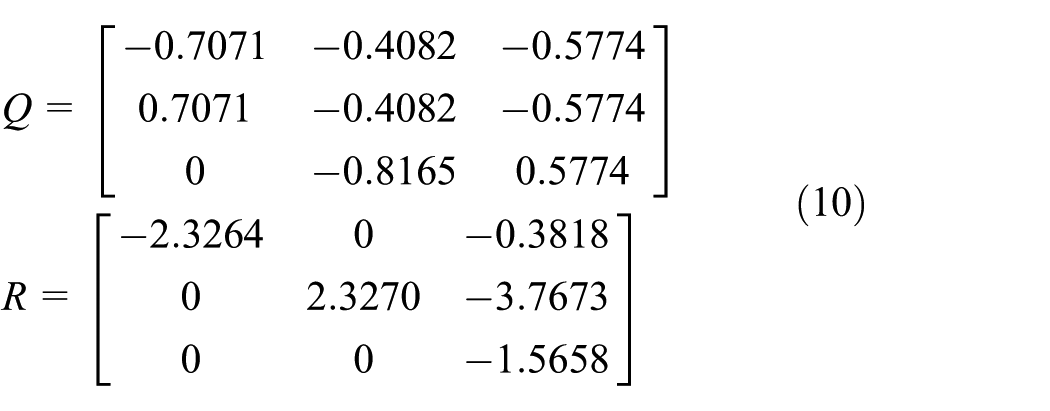
The eigenvalues and eigenvectors are given by

Based on the screw and reciprocal theory, there have three wrench constraints which acted upon the end effector. To avoid singularity of multi-input force, the directions of three actuators should be mounted according to the parallel prototype manipulator with three-translational DOF such as UPU type. According to equation (8), a rectangle design domain is selected for the design domain field with length, width, and height of 299.98, 299.98, and 80.01 mm, respectively. The design domain of the proposed spatial compliant mechanism with three-translational DOFs is shown in Figure 3.

The design domain of topology optimization according to the parallel prototype manipulator.
Topological model of three-translational DOF spatial compliant mechanism
Looking through a sufficiently strong macro-scope, the mapping relationship between the input forces by actuators and output displacements is satisfied with Jacobian matrix, given by equation (12). On the other hand, they also satisfy the stress and strains transferred by stiffness matrix from the micro-scope, given by equation (13)


where
Comparing equation (12) with equation (13), the mapping relationship between the optimized Jacobian matrix and the global stiffness matrix can be given by

The SIMP method
29
is based on a heuristic relation between element density

where

where

where
Looking through a micro-scope, the element stiffness matrix is transferred and changed to construct the global stiffness matrix by an accumulative method, such as

The optimal model of three-translational DOF spatial compliant mechanism is described as follows

where
Sensitivity analysis
Using the sensitivity values of the objective function and constraint function, the change directions of the design variables during topology optimization process can be determined.
Derivative of the volume constraint

where
The hexahedral element structure is adopted to mesh partition the grid, that is,
When gradients are required by the optimization algorithm employed to solve equation (19), these are easily derived for the objectives and constraints involving only x. These expressions will then contain derivatives of the displacement, which in turn can be obtained by taking the derivative of the equilibrium equation

where

This can in turn be written as

where
Moreover, the form of the stiffness matrix means that the derivative of the compliance

where u is the element vector of nodal displacement, and

The derivative of the objective function with the design variables is

Without the loss of generality, we assumed that the input loads independent with design variables. Differentiating equation (7) with the stiffness matrix by the design variables yields
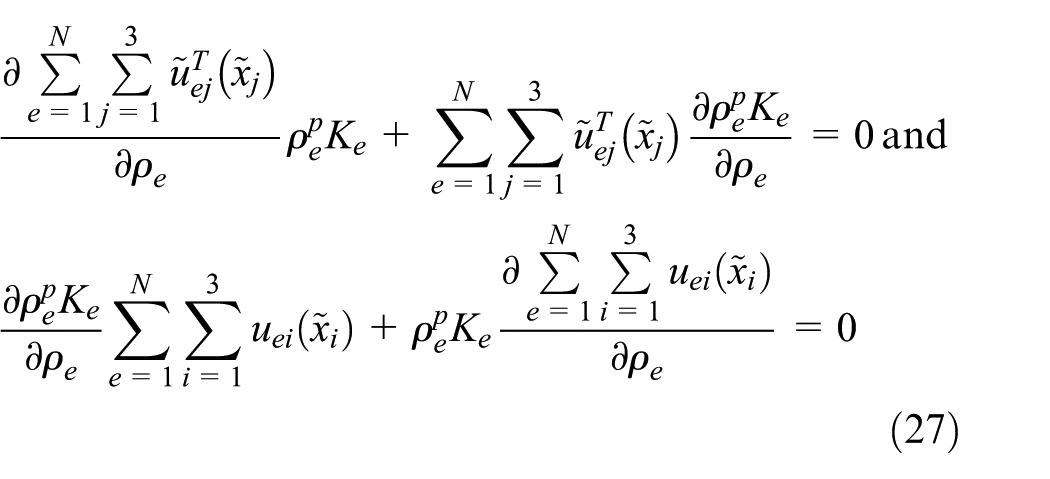
So the sensitivity of objective function can be given by

And the element stiffness matrix satisfy
With the volume as the optimization constraint, the partial derivative of the volume with respect to the material density given by the constraint function sensitivity yields

Solution of the topological model
Based on the variation principle, the function equation that contains the compliance, objective, and constraint functions can be built using the Lagrange multiplier. The update iteration of the multi-inputs and multi-outputs in the 3D space is given by

where

Topological structure of three-translational DOF spatial compliant mechanism
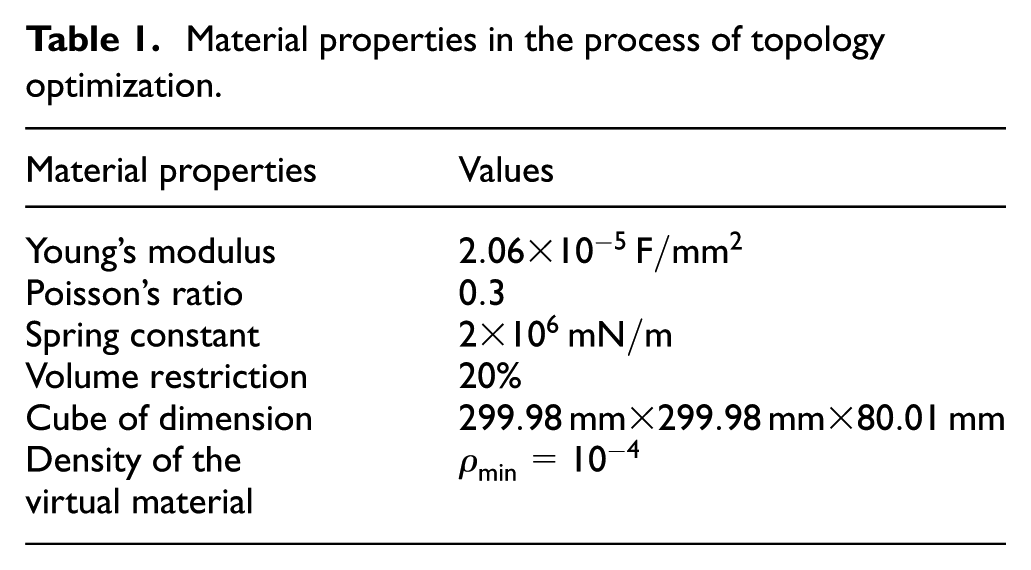
Several examples of spatial compliant mechanism with three-translational DOF are presented in this section to demonstrate the proposed method: (1) the structures of different iteration steps, (2) the differential displacement characteristics of the proposed compliant mechanism, and (3) the first six order vibration modal. The material properties used are described in Table 1.
Material properties in the process of topology optimization.
The convergence criterion is defined in this work as the change in the objective function iterative steps in equation (31), which is considered an adequate number of iterations for the convergence study.
Figure 4 shows the convergence history of the optimization process in the case of volume restriction equal to 20% of the design domain field. The compliance defined by equation (26) decreases very quickly in the first five iterations according to equation (30), while the objective function is derivative in the case of the gradient convergence of Jacobian mapping matrix of parallel prototype manipulator. The volume constraint is active when the objective function has been minimized. After the fifth iteration, the compliance change becomes gentle. This implies that it is necessary to have sufficient convergence strategy in order to satisfy the volume restriction condition and obtain the rigidity required to hold a workpiece, simultaneously.
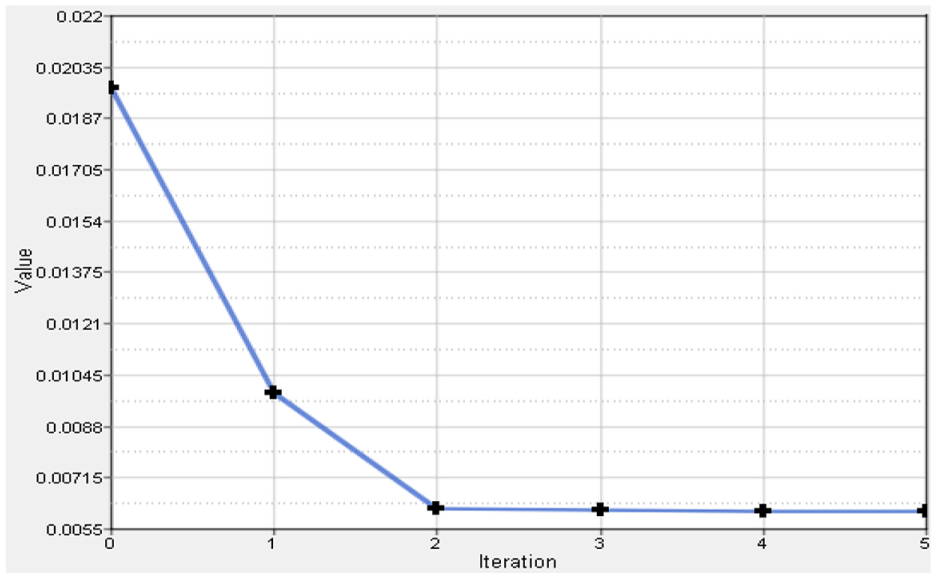
Convergence history of the optimization process in the case of volume restriction equal to 20% of the design domain field
Figure 5 shows the topological structures with several iterative steps.

Topological structures: (a) iteration step 2, (b) iteration step 4, (c) iteration step 6, and (d) iteration step 9.
The stress distribution of the maximum and minimum values of before/after topology optimization is shown in Table 2.
Stress distribution before/after topology optimization process.

The micro-displacement with 3D directions is shown in Table 3.
Micro-displacement with three-dimensional directions.
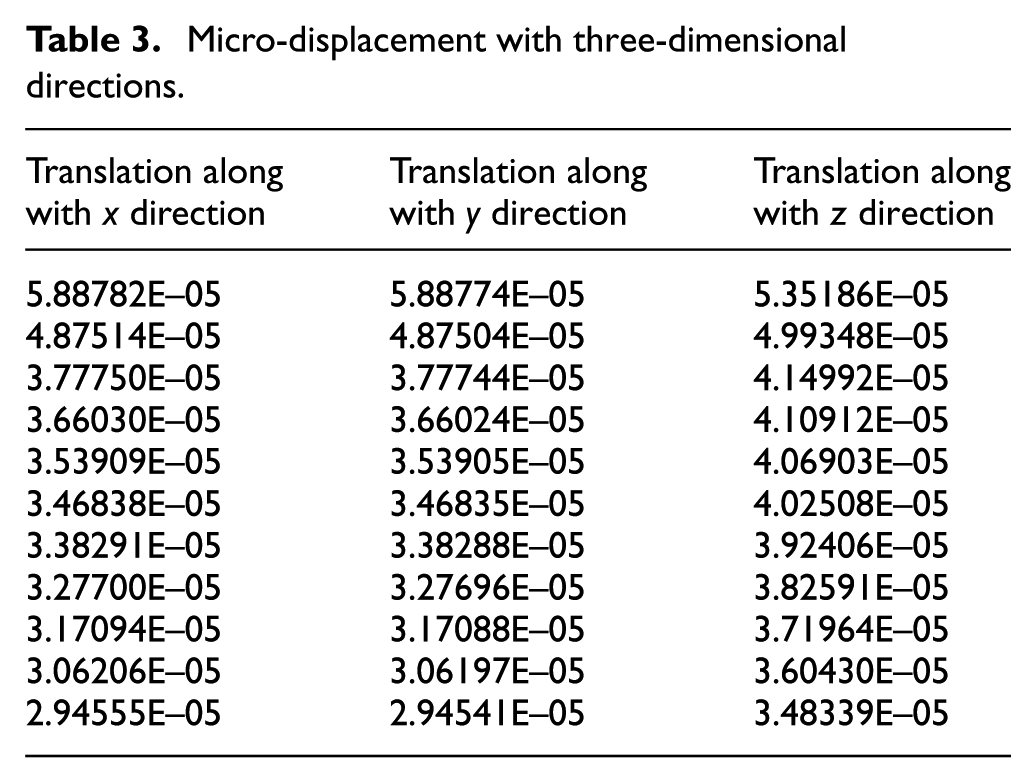
Figure 6 shows the topological structure of spatial compliant mechanism with three-translational DOF manufactured by 3D printing technology. During the manufacturing process, three piezoelectric actuators are installed inside the topological structure by terminating printing and restarting the manufacturing process after installation.

Topological structures: (a) side view and (b) top view.
Vibration modal analysis
Vibration modal analysis is the inherent of vibration characteristics of mechanism, and it is important in micro- or nano-scale manufacturing field. By using OptiStruct software (Version 2017; Altair Engineering, Troy, MI, USA), the vibration modal with the first four order is analyzed for the same input load conditions and boundary constraint conditions. The first four order modal analyses are shown in Figure 7(a)–(d), respectively.

Vibration modal of the first four order: (a) first order, (b) second order, (c) third order, and (d) fourth order.
The values of vibration modal of the first four order are shown in Table 4.
Values of vibration modal of the first four order in before/after topology optimization.

Conclusion
PRBM is widely used in the modeling of compliant mechanisms. However, the topological structure of spatial compliant mechanism has features with hingeless (or hidden hinges); so it is difficult to find an exactly pseudo-rigid body that corresponds with the spatial compliant mechanism with topological structure. In this article, a novel topology optimization approach is proposed for the design of three-translational DOF spatial compliant mechanism by combining the optimized Jacobian mapping matrix with SIMP topological method. First, by using the condition number method, the structural parameters of UPU-type parallel prototype manipulator are optimized, and then, the differential Jacobian mapping matrix is calculated with differential equivalent method. Second, comparing with the driver configuration and twist/wrench constraints of the UPU-type parallel prototype manipulator, the topological algorithm combining SIMP with optimized Jacobian mapping matrix is proposed. Finally, a novel spatial compliant mechanism with three-translational DOF is derived, and numerical simulation results are reported to demonstrate the effectiveness of the proposed method. Several conclusions are derived as follows:
To keep the mapping relationship through the whole topological process, the Jacobian mapping matrix should be optimized before topology optimization process. So, the structural parameters of UPU-type parallel prototype manipulator are optimized by using condition number method; furthermore, the Jacobian mapping matrix is calculated by using differential equivalent method.
By analyzing the conversion relationship between voltage and displacement of piezoceramic actuator, a novel topological algorithm combining the SIMP with Jacobian mapping matrix is proposed. Some initial topological conditions are set according to the UPU-type parallel prototype manipulator.
The optimized three-translational DOF spatial compliant mechanism is imported to Hyperworks@ for analyzing finite element static characteristics. The maximum and minimum translational displacement of 1.875 × 10−5 mm and −1.902 × 10−5 mm in x direction, 6.397 × 10−5 mm and −4.006 × 10−5 mm in y direction, and 1.135 × 10−5 mm and −2.204 × 10−5 mm in z direction are obtained.
Through the comparative simulation studies with the stress distribution and the first four order vibration modal of the proposed spatial compliant mechanism, the fourth order vibration modal increase 39%, 39%, 38.62%, and 32.92%, respectively. Results show that the proposed method can ensure the integral isomorphism characteristics between the proposed spatial compliant mechanism and the conventional parallel prototype manipulator with uniform stiffness and vibration suppression.
Footnotes
Acknowledgements
The authors would like to thank the reviewers and the editor for their efforts in improving the paper. DZ designed the whole project framework, YF and WZ conceived and designed the experimental process, DZ and YF analyzed the data, DZ wrote the paper, and YF revised the manuscript of this paper. The founding sponsors had no role in the design of the study; in the collection, analysis, or interpretation of data; in the writing of the manuscript; and in the decision to publish the results.
Handling Editor: Wen-Hsiang Hsieh
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant No. 51165009/50965007 and Provincial Key Platform and Major Scientific Research Project of Higher Education of Guangdong Province of China under Grant No. 2017KZDXM060.