
Abstract
In order to study the elastodynamic behaviour of 4- universal joints- prismatic pairs- spherical joints / universal joints- prismatic pairs- universal joints 4-UPS-UPU high-speed spatial PCMMs(parallel coordinate measuring machines), the nonlinear time-varying dynamics model, which comprehensively considers geometric nonlinearity and the rigid-flexible coupling effect, is derived by using Lagrange equations and finite element methods. Based on the Newmark method, the kinematics output response of 4-UPS-UPU PCMMs is illustrated through numerical simulation. The results of the simulation show that the flexibility of the links is demonstrated to have a significant impact on the system dynamics response. This research can provide the important theoretical base of the optimization design and vibration control for 4-UPS-UPU PCMMs.
1. Introduction
The PCMM, which has advantages of high stiffness, good dynamic performance, no accumulated precision errors, tight construction and strong modularization, has gained a lot of attention and developed rapidly1–2. In high-speed and high-acceleration conditions, due to the greater external and internal loads, the deformations of the links might induce noise and strong vibration and lead to reducing the motion precision and the stability of the PCMM. Therefore, the dynamic behaviours of high-speed PCMMs must be studied.
In recent years, many researchers, such as Wang3, Du4, Zhang5, and Zhou6, have studied the elastodynamic behaviour of planar mechanisms, and a number of approaches have been developed to predict the elastic dynamic behaviour of flexible planar mechanisms. However, there have been few efforts made oriented to spatial parallel machines and the links' flexibility and the coupling effects of the flexible links' elastic displacement have not been sufficiently considered.
This paper takes the 4-UPS-UPU PCMM(see Figure 1), which consists of a stationary platform, a moving platform, four UPS(Universal joint-Prismatic pair-Spherical joint) actuating limbs, a UPU(Universal joint-prismatic pair-Universal joints) actuating limb and a working head, as an example. The nonlinear elastodynamic model is established and then the numerical simulation analysis of dynamic response for 4-UPS-UPU PCMM, including displacement error output response, velocity error output response, and acceleration error output response can be calculated.
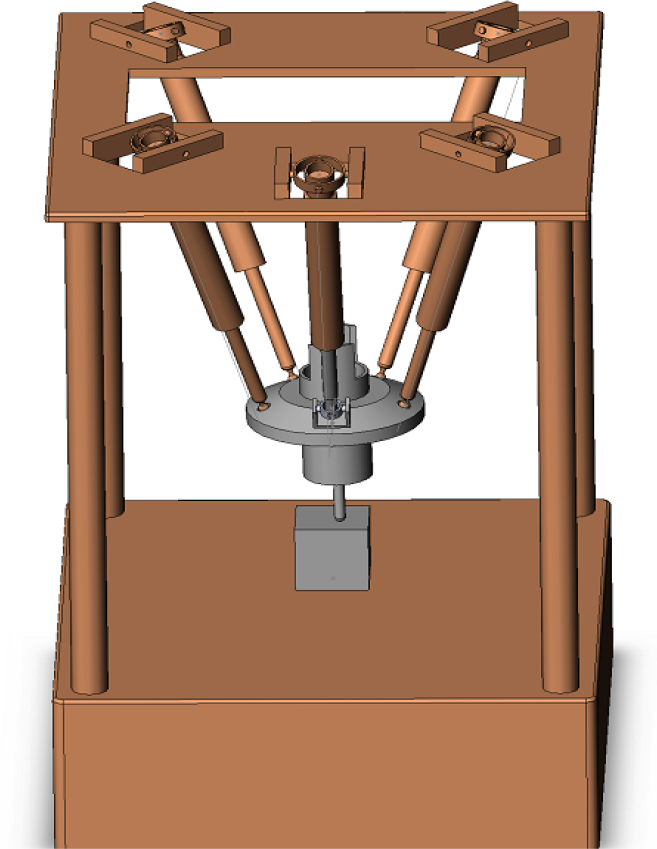
Structural diagram of a parallel mechanism.
2. Dynamic Modeling of 4-Ups-Upu High-Speed Spatial Pcmms
2.1 Model of the flexible beam element
The flexible driving limbs of the 4-UPS-UPU PCMM can be divided into several parts which are composed of equal cross-section spatial beam elements.
As shown in Figure 2, the displacements of a point in the element which include axial, transverse, rotary and curvature displacements are expressed as
Model of a flexible beam element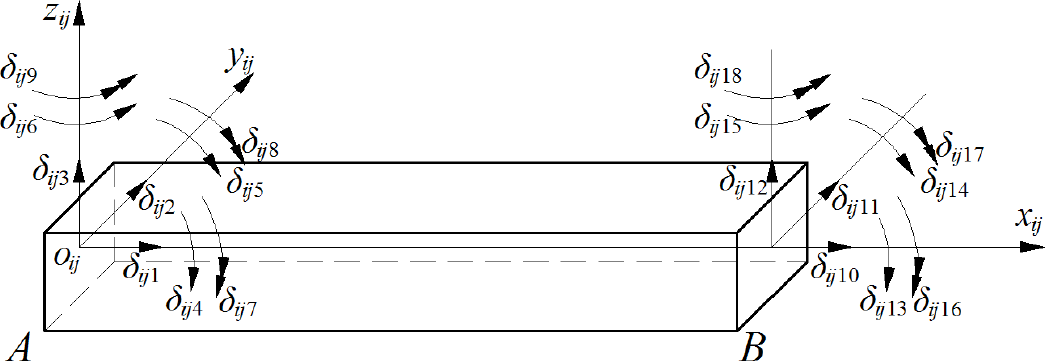





Where
2.2 Kinetic energy of the beam element
The kinetic energy of the beam element consists of translating the kinetic energy and rotating kinetic energy. The translating kinetic energy of the beam element can be described as:

The rotating kinetic energy of the beam element can be denoted as:
So the kinetic energy of the beam element is given by:

After arranged, the kinetic energy of the beam element is obtained as follows:

Where
2.3 Potential energy of the beam element
The potential energy of the beam element consists of gravitational potential energy and elastic potential energy. The gravitational potential energy of the beam element can be described as:

The elastic potential energy of the beam element can be denoted as:

Where

So the potential energy of the beam element is given by:

2.4 Dynamic equations of the element
The dynamic equation of the element, which is derived by using the Lagrange equation, is given by:

Where

2.5 Dynamic equations of the limbs
The kinematic constraint conditions of elements are express as follows:



When i = 1, we can get
When i = 2,3,4,5, we can get
The relation equation between

The transformation matrix Āij is varied correspondingly with the different limbs and different connection elements.
The dynamic equations of limbs oriented to element j are given by:

When fabricating all the dynamic equations of limb oriented to elements, the dynamic equation of limb oriented to limb i is given by:

2.6 System dynamic equations
The kinematic constraint conditions can be expressed by:

Where

The dynamic constraint conditions can be expressed by:

When simplifying the dynamic constraint conditions can be expressed by:

The relation between

Then we can get

The relation between

Where

The dynamic constraint conditions and the dynamic equations of the limb expressed by

When considering the actual damping, the system dynamic equation of a 4-UPS-UPU PCMM is given by:


Where
3. Numerical Simulation and Analysis
The primary structural parameters of the 4-UPS-UPU PCMM are illustrated as follows. The distance between the furthest universal joint and the centre point on the stationary platform is 780mm, the distribution radius of the universal joints on the stationary platform is 720mm, the distribution radius of the spherical joints on the moving platform is 200mm, the distribution position angle of the universal joints on the stationary platform is π/2, the distribution position angle between the furthest universal joint and the neighbouring universal joint on the stationary platform is π/4, the distribution position angle of the spherical joints on the moving platform is 2π/5.
The system parameters of the 4-UPS-UPU PCMM is illustrated as follows: Each driving limbs is made of steel with a density of 7800kg/m3, an elastic modulus of 2.1×1011Pa and a Poisson's ratio of 0.3. The mass of the moving platform is 105.85kg.
The motion of the working head for a 4-UPS-UPU PCMM is described as:

The dynamic responses of a 4-UPS-UPU PCMM are realized by the Newmark method and thus the displacement error output response, velocity error output response and acceleration error output response, are obtained.

Displacement error output in X axis.

Displacement error output in Y axis.
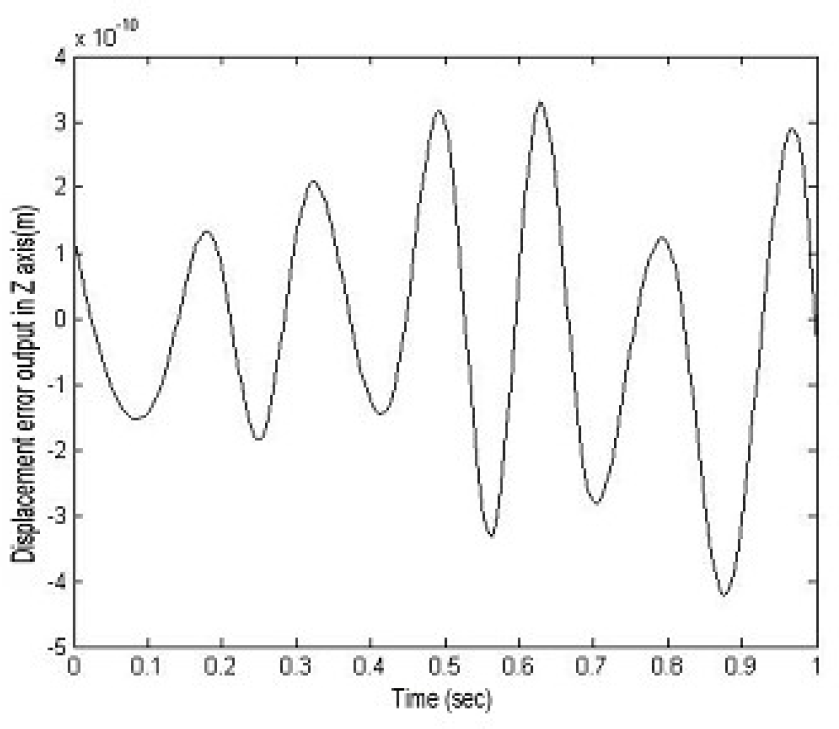
Displacement error output in Z axis.

Velocity error output in X axis
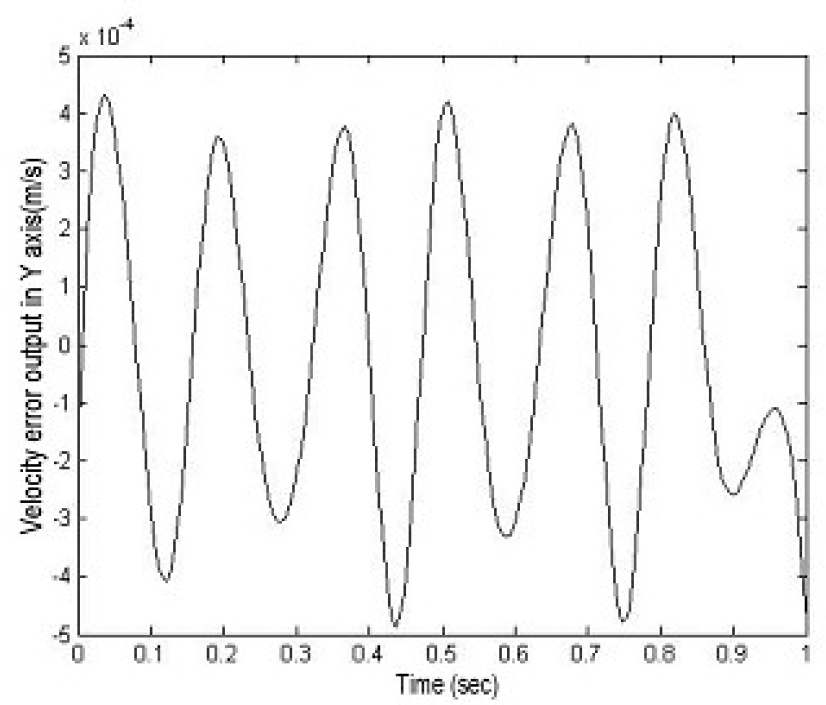
Velocity error output in Y axis.

Velocity error output in Z axis

Acceleration error output in X axis.

Acceleration error output in Y axis
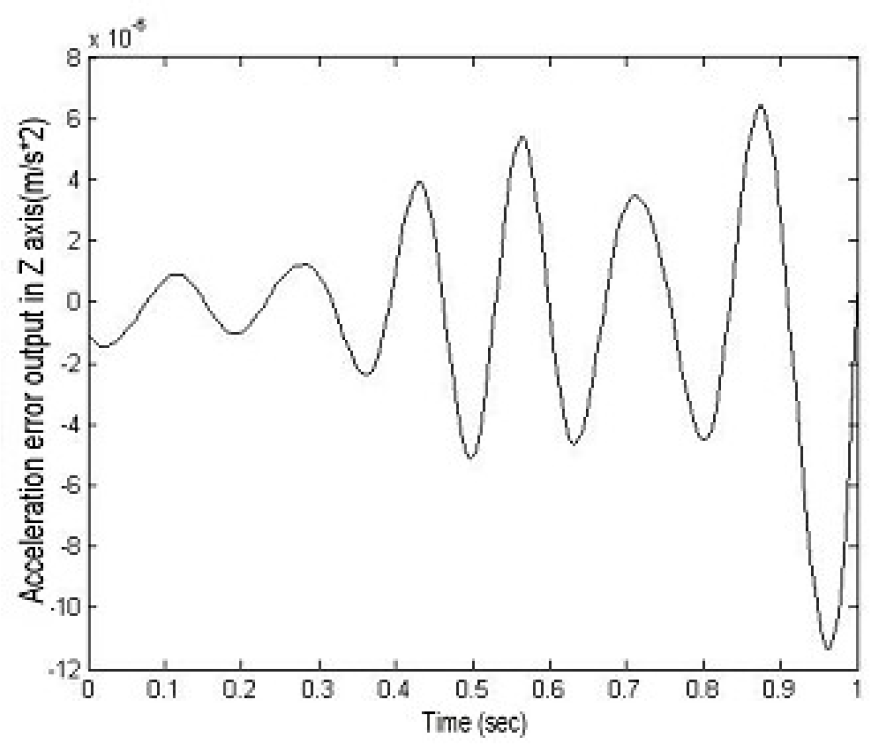
Acceleration error output in Z axis.
4. Conclusion
The nonlinear elastodynamic model of high-speed 4-UPS-UPU PCMMs is derived by the application of the Lagrange equation and the finite element method. The dynamic responses including displacement error output, velocity error output, and acceleration error output are obtained. The simulation results show that the links' flexibility and the coupling effects of elastic motion and rigid motion have a significant impact on a 4-UPS-UPU PCMM system, and provide an important theoretical base for the optimization of design in controlling and reducing vibration for these parallel mechanisms.
Footnotes
5. Acknowledgments
This research is supported by the National Natural Science Foundation of China[Grant No. 51005138], Shandong Young Scientists Award Fund[Grant No. BS2012ZZ008], the Natural Science Foundation of Shandong Education Department of China[Grant No. J09LD54], the Science Foundation of SUST[Grant No. 2011KYJQ102].