
Abstract
In this paper, linear navigation law is studied in depth and we suggest an efficient, practical and simple approach for nonholonomic mobile robot navigation under velocity vector control based on the linear navigation law. First of all, an obstacle is equivalent to a velocity vector when detected by a robot's sensory system according to the relative distant and relative direction between the robot and the obstacle. Then the vector sum of all obstacles' equivalent velocity vectors (OEVVs) and the linear navigation velocity vector (LNVV) derived from the linear navigation law drives the robot to reach the desired goal position without colliding with any obstacle in the robot's workspace. Furthermore, during the process of driving the mobile robot under the resultant velocity vector, a set of strategies for velocity and acceleration constraints (VAC) is devised to make kinematic behaviours of the mobile robot more practical. Finally, to validate the effectiveness and superiority, extensive simulation results with no obstacles, a single obstacle and multiple obstacles are provided.
Keywords
1. Introduction
Navigation is among the most important and fundamental problems in mobile robotics. This problem is not only of interest to mobile robotics, but has also been widely studied from different points of view (control theory [1], artificial intelligence [2, 3], hydromechanics [4] and so on). Various methods are discussed in the literature, such as the roadmap method [5], the well-known Khatib artificial potential field [6], and most recently, the linear navigation law [7]. Due to the broad and promising applications of mobile robots in the industrial and service fields, researchers have been looking for a more efficient, practical and simpler navigation method.
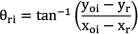
The idea of the artificial potential field was originally suggested for manipulator collision avoidance [6] and is also widely used for mobile robots. The main drawback of this method is the local minima [8, 9]. One challenge problem [10] of the potential field method is to find a suitable potential energy function which ensures obstacle avoidance and goal attainability at the same time. Another challenging problem is to calculate the potential energy for an arbitrarily shaped obstacle. Once the potential field is determined, the distribution of the velocity field can be specified by computing the derivative to each point of the robot's workspace. Intelligent generation methods of the angle and speed components of the velocity vector field are discussed by Claudia [11, 12] respectively based on hydrodynamics and the fuzzy-logic technique.
Most recently, a new navigation method called the linear navigation law [7, 13] has been suggested for nonholonomic mobile robots. This method is based upon the proportional navigation guidance law [15] that is a navigation method well known and widely discussed in the aerospace community. In the linear navigation law a mobile robot's orientation angle is a linear function of the visibility angle, i.e., line of sight, and collision avoidance can be achieved by modifying the linear proportional parameters in an online or offline manner, details can be found in [14]. Since the standard proportional navigation can be used to track moving objects, through some improvements the linear navigation law could be capable of real-time navigation and trajectory tracking for moving goals. In addition, the linear navigation law is a simple and efficient method that can be applied to almost all types of mobile robots without any restriction to the robot's dimension and the obstacles' geometric shapes.
Owing to these advantages, many attempts to use this method for mobile robot navigation have been made. In [7], the linear navigation function, based on kinematic equations with exponential and deviation terms, is used for nonholonomic wheeled mobile robots. In [13], a detailed deduction from the proportional navigation guidance law to the linear navigation law is studied, various simulation examples are presented to confirm their theoretical results and the results are proven rigorously in mathematics. Although some promising results have been achieved in previous work, it does not mean that the linear navigation law has been studied in depth and several issues deserve to be investigated. For example, when an obstacle is detected by the sensory system, the linear navigation parameters need to be tuned online and a local goal position needs to be selected for collision avoidance; this strategy is inefficient and cannot be extended to multiple robots. Besides, the linear navigation law does not take the kinematic constraints of a real mobile robot into account.
In this paper, the real-time navigation problem of a nonholonomic mobile robot in static environments is discussed and we suggest an efficient and practical real-time navigation approach for the nonholonomic mobile robot under velocity vector control based on the linear navigation law. For each navigation period, an obstacle is equivalent to a velocity vector when detected by the robot's sensory system according to the relative distant and relative direction between the robot and the obstacle. Then the vector sum of all obstacles' equivalent velocity vectors (OEVVs) and the linear navigation velocity vector (LNVV) derived from the linear navigation law makes the robot move to the desired goal position without any collision. Actually, the OEVV effects locally within a certain distance of an obstacle to move the robot away from the obstacle, whereas the LNVV effects globally in the whole workspace, moving a robot to the desired goal. Furthermore, in order to make the kinematic behaviour of a mobile robot more practical, a set of strategies for velocity and acceleration constraints (VAC) is devised. The advantages of our approach can be summarized as follows.
1) Compared with the potential field method, our approach does not have oscillations in the presence of obstacles.
2) As a result of the strategies for VAC, the path resulting from our approach becomes shorter and more practical when compared with the linear navigation law.
3) The relative distance between a robot and an obstacle can be changed by tuning the weighting factor of our approach.
4) In the multi-obstacle environment, these processes in the linear navigation law of tuning navigation parameters online and selecting a local goal position for collision avoidance are not needed in our approach, and the navigation path obtained is smoother.
5) Our approach is quite simple and highly efficient. More importantly, it could be adapted to the navigation problem of multiple mobile robots in dynamic environments with some improvements.
This paper is organized as follows: in Section 2, we introduce the problem. In Section 3, we discuss the technique of OEVV and the strategies for VAC. An extensive simulation is carried out to illustrate our approach in Section 4. Conclusions are drawn in Section 5.
2. Problem Description
The real-time navigation problem of a mobile robot is shown in Fig.1. Our aim is to develop an approach that ensures obstacle avoidance and goal attainability at the same time. For simplicity, the following definitions/assumptions are made.
1) The workspace is attached to a global fixed reference frame of coordinates
1) The mobile robot with a circular shape is denoted by R, its radius is
2) The obstacle denoted by
3) The mobile robot has a semi-omnidirectional sensory system that allows it to measure in real-time the position and the size of obstacles in the coverage area (CA) of the robot's sensory system. The CA is characterized by a semicircle in front of the robot with a radius
4) The goal position of the robot is denoted by G with coordinates
5) The robot can be treated as a point by extending the size of obstacles by at least half of the size of the robot.
In addition, it is assumed that the wheels do not slide, that is to say, a nonholonomic constraint exists on the motion of the mobile robot in the form

Therefore, the kinematic model of the mobile robot can be described using the following equations. Where

The real-time navigation problem of a mobile robot

A discrete-time version of the dynamic model of the mobile robot is:

Where T is the navigation period with
Without loss of practicability, it is assumed that the mobile robot is subject to the following VAC.

3. Real-Time Navigation under Velocity Vector Control
For the real-time navigation problem of a mobile robot, some variables have to be defined to represent the instant status messages of the robot, the goal and the obstacles. In the potential field method [16], a goal is characterized by an attractive force and an obstacle is characterized by a repulsive force, afterwards, a robot moves in the resultant potential field. In the linear navigation law method [7], the orientation angle of a mobile robot is represented in real-time by the relative distance and direction between the robot and the goal. While an obstacle is perceived by the sensory system, a polar histogram providing free directions is constructed, then the linear navigation parameters are tuned online and a local goal position is selected for collision avoidance.
In our approach an obstacle in the CA of the sensory system is equivalent to a velocity vector, the resultant vector of OEVV and LNVV drives the robot to reach the desired goal position without colliding with any obstacle in the robot's workspace. See Fig. 2, the obstacles of

Real-time navigation under velocity vector control

In general conditions
Compared with the potential field method, our approach calculates directly the velocity vector for controlling a mobile robot, without the processes of computing the attractive force/repulsive force and transforming them to the linear velocity/orientation angle. Moreover, the local minima problem does not exist in our approach. Compared with the linear navigation law, when an obstacle is detected, our approach does not need to construct a polar histogram for free directions and select a local goal position for collision avoidance. It can avoid the obstacle according to the resultant velocity vector from the OEVV and LNVV, therefore, the path is shorter. Furthermore, multiple mobile robot navigation and collision avoidance in dynamic environments are related problems that can be solved using our approach through certain improvements, however, this is beyond the scope of this paper.
3.1. Technique of the OEVV
As long as an obstacle is located in the CA, it has to be dealt with; in other situations it cannot be considered, see Fig. 2. This is reasonable, since in practical terms, when an obstacle is located outside of the CA, it cannot be perceived by the robot's sensory system; so it would naturally not be taken into account in the navigation decision-making process.
The variable

The technique of the OEVV for the obstacle


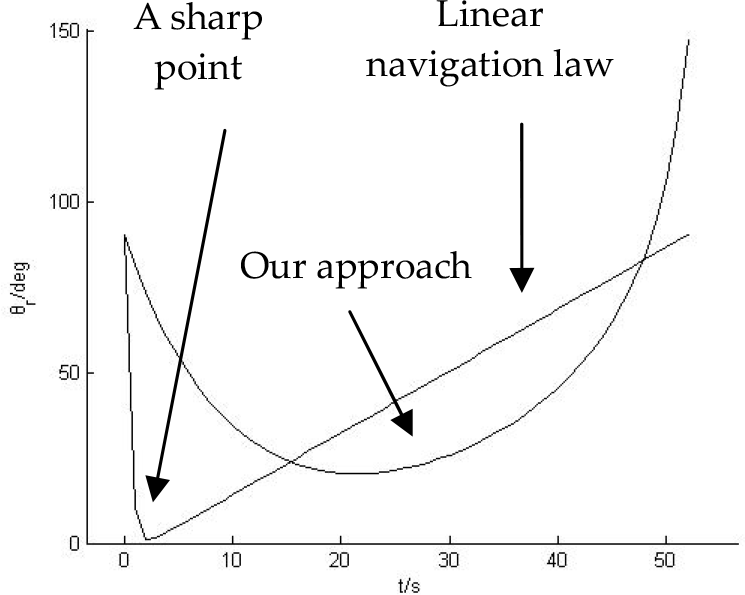
The curve of the magnitude of OEVV can be seen in Fig. 3, which illustrates the variation of the speed
Fig. 4 illustrates that when using our approach there is no oscillation in the presence of an obstacle, an inherent limitation in the potential field method. Next, we give brief proof for this proposition. As soon as an obstacle

The curve of the magnitude of OEVV
Oscillations in the presence of an obstacle

The shift of a robot's orientation angle caused by the OEVV

The opposite directions of the OEVV and LNVV
Next the security of collision avoidance and goal attainability are discussed.
3.2. Strategies for the VAC
It can be recognized that in absence of kinematic limits, that is the VAC, these control inputs of
These control inputs of linear velocity and orientation angle for a real mobile robot are

Considering the velocity constraints, the following strategies are adopted to limit the linear velocity and angular velocity.





Considering the acceleration constraints, the following strategies are adopted to limit the linear acceleration and angular acceleration.





Remarkably, by construction, it is

Hence, the control inputs of linear velocity and orientation angle for a real mobile robot can be finally set:

4. Simulations
In order to validate the effectiveness and superiority of our approach, extensive simulation results are presented in this section. The parameters are set as follows:
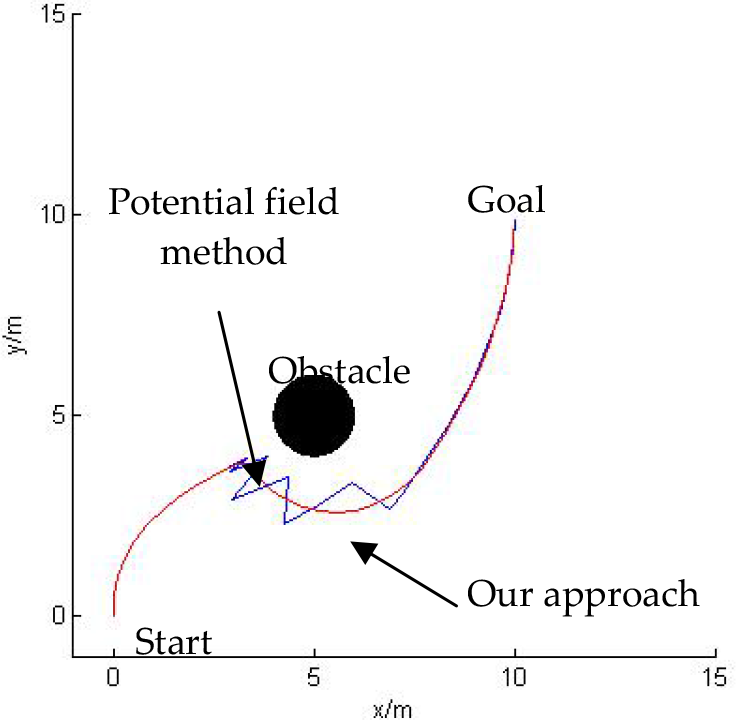
The experiment results of navigation without obstacles illustrate the effectiveness. The sharp points on the navigation path in the linear navigation law do not occur in our approach and the path obtained is shorter and more practical. The experiment results of navigation with a single robot illustrate that an obstacle can be avoided effectively using our approach; in addition, the distance between the robot and the obstacle can be changed online by tuning the weight factor β. The experiment results of navigation with multiple obstacles illustrate that our approach is still effective in a complex environment and the processes in the linear navigation law of tuning the navigation parameters online and selecting a local goal position for collision avoidance are not needed in our approach. Note that simulation results with regard to the lack of oscillations in our approach are no longer given in this section, however, you can find them in Fig. 4.
4.1. Navigation without Obstacles
The navigation results of our approach and the linear navigation law without obstacles are shown in Fig. 7. According to Eq. (5), when no obstacles are perceived by a robot, it is clear that the formulation difference between our approach and the linear navigation law is nothing more than a proportional factor. However, due to the VAC, the navigation path derived from our approach does not have a sharp point that occurs in the linear navigation law; moreover, the path is shorter and seems more practical. Fig. 8 shows the curves of the robot's orientation angle in the navigation course, which illustrate once again that our approach can generate a continuous and smooth orientation angle while the linear navigation law cannot. Fig. 9 shows the curves of the robot's linear velocity, from which it is evident that these two methods have the same trendline.

Experimental results without obstacles when compared with the linear navigation law
Curves of the orientation angle without obstacles

Curves of the linear velocity without obstacle

Experimental results with a single obstacle
4.2. Navigation with a Single Obstacle
The navigation results with a single obstacle with different values of β are shown in Fig. 10. The start and goal positions are
Fig. 13 depicts curves of the OEVV (
1) The maximum of OEVV, that is

Curves of the orientation angle with a single obstacle

Curves of the linear velocity with a single obstacle
Curves of the OEVV with different values of β
Values of
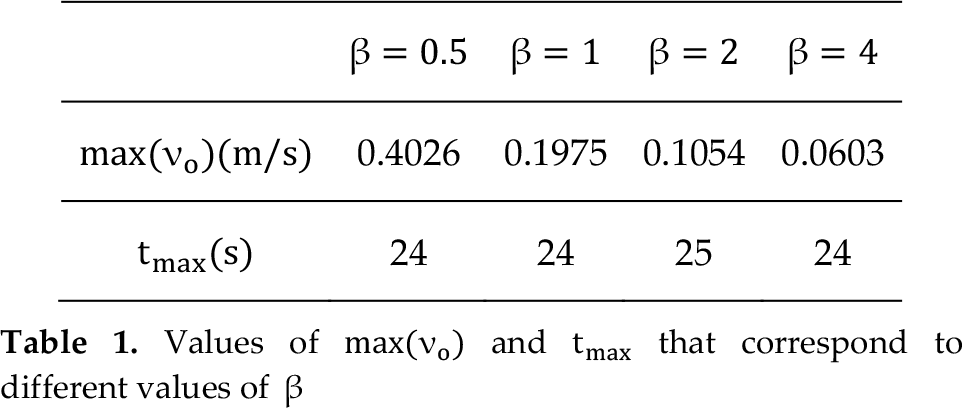
2) An approximate proportion function lies between the

Curves of the directions of OEVV
Fig. 14 depicts the curves of the directions of the OEVV. In the beginning and the final phases, the direction angle is
4.3. Navigation with Multiple Obstacles
The navigation results with multiple obstacles are given in Fig. 15. The start and goal positions are
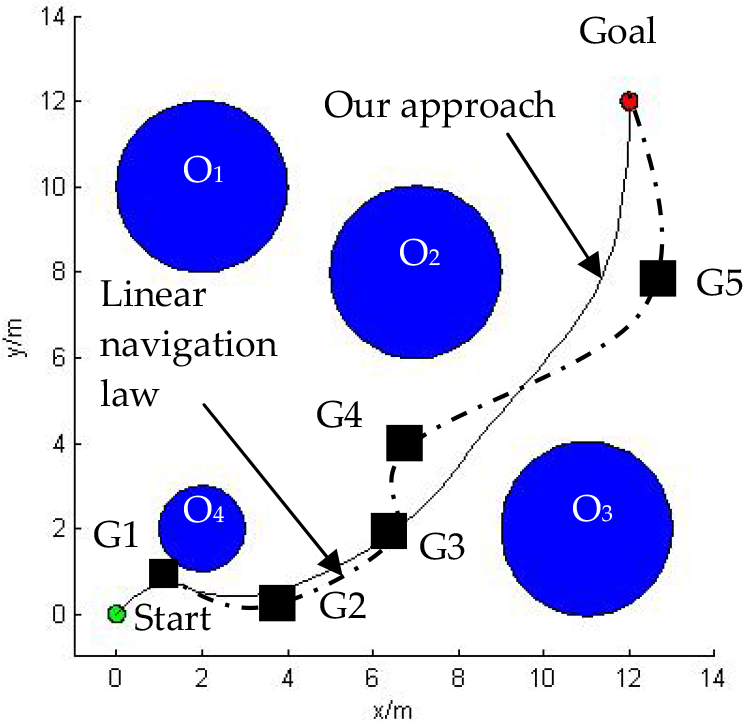
Experimental results with multiple obstacles when compared with the linear navigation law

The effect of the weight factor
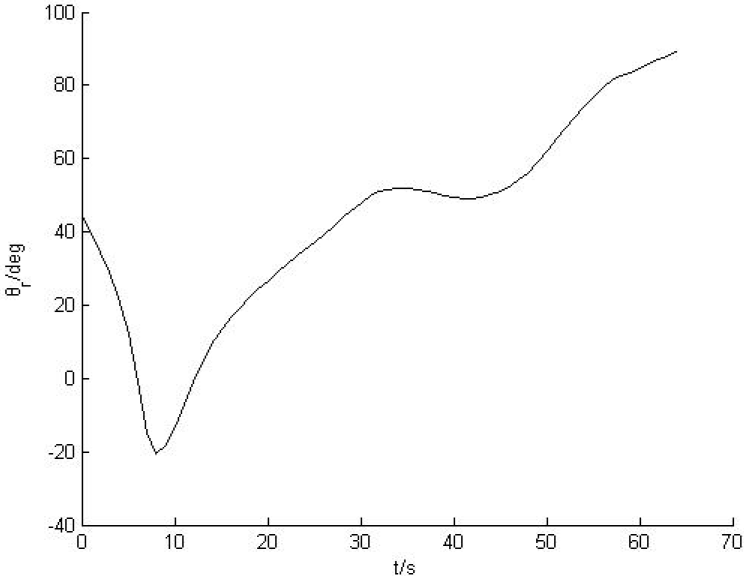
Curves of the orientation angle with multiple obstacles
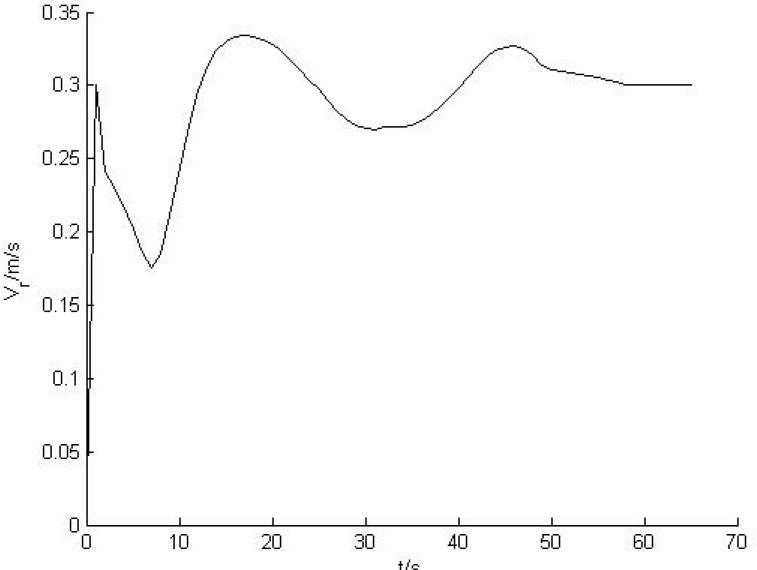
Curves of the linear velocity with multiple obstacles
5. Conclusions
In this paper we suggest an efficient, practical real-time navigation approach for nonholonomic mobile robots under velocity vector control based on the linear navigation law. When an obstacle is detected by a robot's sensory system, the obstacle is equivalent to a velocity vector according to the relative distant and relative direction between the robot and the obstacle. Then the velocity vector sum of the OEVV and LNVV makes the robot move to the desired goal position without any collision. In order to make the kinematic behaviour of the mobile robot more practical, a set of strategies for VAC is devised. The effectiveness and superiority of our approach is validated by extensive experimental results for no obstacles, a single obstacle and multiple obstacles. The suggested approach could be adapted to the real-time navigation problem of multiple mobile robots in dynamic environments with some improvements.
Footnotes
6. Acknowledgments
The work was partially supported by the National High-Tech Research and Development Plan of China (No.2007AA01Z313), the National Natural Science Foundation of China (No.60773022) and the Research Fund for the Doctoral Programme of Higher Education of China (No.20104307110003).