The hyper-chaotic least square method for finding all real solutions of nonlinear equations was proposed and the inverse displacement analysis of a general 6R manipulator was completed. Applying the D-H method, a 4 × 4 matrix transform was obtained and the first type twelve constrained equations were established. Analysing the characteristics of the matrix, the second type twelve constrained equations were established by adding variables and restriction. Combining the least square method with hyper-chaotic sequences, the hyper-chaotic least square method based on utilizing a hyper-chaotic discrete system to obtain and locate initial points to find all the real solutions of the nonlinear questions was proposed. The numerical example was given for two type constrained equations. The results show that all the real solutions have been obtained, and it proves the correctness and validity of the proposed method.
The inverse displacement analysis of a robot plays an important role in robotics, which is directly related to the problems of the off-line programming, trajectory planning and real-time control. It is most difficult in relation to inverse displacement analysis on a general space 6R manipulator. This issue with the 6R mechanism belongs to the same problem, which has been called the Mount Everest of the position analysis on a space mechanism [1]. In 1973, J. Rastegar and V. Scheinman [2] pointed out that the number of the solutions was up to 32 in the inverse displacement analysis of a general 6R serial robot. In 1985, L. W. Tsai and A. P. Morgan [3] simplified the above problem in eight quadratic equations using the high dimensional approximation analysis on the inverse kinematics problem and carried out the numerical solution adopting a polynomial continuous method, and then speculated as to the conclusion that the solution number is up to 16 on a variety of different structures of 6R robot. In 1989, M. Raghavan and B. Roth [4] made use of the nature of the rationale generated by using the separation elimination method and multi-variable equations, and calculated a 16th degree polynomial from the half-angle tangent formula of the joint variables. In 1991, C. Wampler and A. P. Morgan [5] proposed that all the cases involving the inverse displacement problem were only solved using the extension method, but the algorithm based on the extension method ran very slowly. From 1990 to 1992, M. Raghavan and B. Roth [6-8] first proposed a method solving the characteristic polynomial of the general 6-DOF manipulator, including all the special circumstances of 6R, 5R1P, 4R2P, 3R3P, and with the aim of solving all of the 6-DOF robot mechanism. In 1991, C. W. Wampler and A. P. Morgan [9] completed the 6R inverse position problem using a generic-case solution methodology with 11 polynomial equations. In 1993, D. Kohli and M. Osvatic [10] used the product of the powers and the elimination method to obtain a set of equations containing matrix coefficients, and to directly have 16th degree polynomials of no extraneous roots, since the solution to the problem can be simplified to the eigenvector problem. In the same year, D. Manocha and J. F. Canny [11] made use of the symbol processing and matrix computation to transform this problem into the decomposition problem of the matrix to be calculated, and solved the matrix eigenvalues and eigenvectors to obtain the robot joint variables. However, the algorithm finally computed the 24th-order square matrix to solve 24 solutions, including extraneous roots rather than directly the 16 solutions. In 1999, H. J. Su et al. [12] proposed an algorithm based on algebraic elimination to solve the robot inverse kinematics. The method can get a one-variable equation with one joint variable first of all, which greatly reduces the computation procedure of the real-time iterative. However, the algorithm needs to expand the determinant polynomial to solve 16th degree polynomials. A slower computing speed and may occur and cause problems when calculating the polynomial. Y. Q. Yu [13] solved the inverse kinematics problem of a general 6R serial robot and simulated the robot motion by using VC++ with OpenGL in 2003, but there was a poor consequence upon the real-time reverse problem. How to quickly find all the real solutions is important to the research of the mechanism, but it is also one of the basic problems for the general 6R and 7R robot mechanisms.
The research into chaos is one of the important achievements of the 21st century. How to utilize chaotic characteristics is one of the important works of the modern mechanism of research. I have solved the forward displacement problem of 6-RPS in the real area using the chaotic method in [14]. With this method, it advances that the points of a Julia set, which are generated by the Newton iteration method, will appear in the neighbourhood where the Jacobian matrix of the solving equations is equal to zero. However, this supposition has not been proven, and the process for solving the multivariable Jacobian matrix is very complex. The chaotic sequence method is new, in which the initial point of the Newton iteration is generated using the chaotic and hyper-chaotic system and all the real solutions on the mechanism synthesis can be effectively solved [15-17]. When the solutions are not in convergence using Newton method or a quasi-Newton method, the mathematical programming method can be adopted [18]. However, its computational efficiency is very low for the process of solving the inverse kinematics problem of a 6R mechanism by using the mathematics quadratic programming method based on hyper-chaos. With the Newton iteration method, the requirement for the initial value is high. However, the least square method can expand the selected scope of the initial value, and it can sometimes make one initial value convergence while Newton method cannot. For these reasons, combining the least square method with hyper-chaotic sequences and utilizing the initial value that was iterated in the least square method based on hyper-chaotic Hénon mapping, the inverse kinematics problem of a general 6R mechanism was solved in this paper. The example provided shows that the method proposed in this paper is verified as correct and effective.
2. Hénon hyper-chaotic system
The Lyapunov exponent is one of the effective methods depicting the chaos-specific property of nonlinear systems. If one of the Lyapunov exponents is positive, the system is chaotic, and if a system has two or more positive Lyapunov exponents, the system is hyper-chaotic. The greater the number of the positive Lyapunov exponents, the higher the degree of instability in the system [19]. In general, if the systematic state variable number is higher, it probably appears that the unsteady level is also higher.
A general Hénon mapping was designed [20] as follows:
where, expresses the dimension of the system, k is the discrete time, and a and b are adjustable parameters. When i=2, the above mapping is the famous Hénon mapping. When fixed parameters a=1.76 and b=0.1, and the dimensions vary from 2 to 10, after computing, it was found that by increasing , the simple relation of the number n of the positive Lyapunov exponents with the system dimension is in [20] - namely, when a system dimension is the larger of two, the system is hyper-chaotic. For n>10, a simulation study was conducted [18] which also obtained the same result.
3. The least squares method in nonlinear equations
The nonlinear equation is expressed as:
Its solution is written in . Assuming , the least squares iterative method can be described as follows, roughly:
where is the function value of at the point , and is the Jacobian matrix of at the point . Although is always symmetric, positive and semi-definite, it seems that usually there exists the inverse matrix . But the value of its determinant is so small that there exists a serious ill-conditioned problem. Many scholars have put forward improved algorithms, and the most well-known of these is the damped least square method, also known as the L-M method. Recently, a Chinese scholar, C. X. Zhan, proposed a new method called the C. X. Zhan method in a paper. With the new method, computational efficiency is better than with the L-M method, and the convergence rate is faster. So far, this method is the best for solving the least squares problems, and it is adopted in this paper. Its basic steps are as follows: Firstly, it is assumed that , is decomposed to (where, is a lower triangular matrix, and is a diagonal matrix). Secondly, Eq. (3) is rewritten as .
Thirdly, after increasing the damping to , the iterative equation based on the C. X. Zhan method is expressed as:
where is the n-order unit matrix, and is the damping factor where . The selection of the damping factor and the convergence criteria isseen in [21].
4. The hyper-chaotic least square method in nonlinear equations
Using the least square method based on a hyper-chaotic system, the process for finding all of the solutions of nonlinear equations is as follows:
(1) By Eq. (1), to construct the chaos set (, is the variable number of hyper-chaotic system, n is the number of the positive Lyapunov exponents and is also the number of variables. where N is the length of the chaos set), and obtain ;
(2) To take the chaotic sequence as the initial value of the least square iterative method, Eq. (3) has been iterated j times to find all of the solutions in Eq.(2).
5. The mathematical model
According to the structural parameters of the robot - i.e. the D-H parameters - and the link coordinate system, the general 6R robot kinematics can be described as:
where is a homogeneous transformation matrix from the link coordinate system to the coordinate system; is a homogeneous transformation matrix from the coordinate system of the robot end to one of the base.
where, , and are the structural parameters of the robot, and they are determined by the specific robot structure; is the Joint variable. The inverse kinematics problem of the general 6R robot is that the joint variable is found under the conditions of giving , , and . Eq. (5) is expanded as
In Eq. (6), the corresponding parameters are equal and there are twelve scalar equations and four identities. To the mechanism, six of these scalar equations only are independent. Now, with Eq. (7) substituted into twelve scalar equations we can obtain Eq. (8):
where:
Without considering , twelve scalar equations of Eq. (8) are independent. After the solution, the results should be tested as to whether they meet the condition equation . Removing those extraneous roots which are not satisfied conditions, the solutions in Eq.(8) are found.
where and are the non-trivial components of the left and right in Eq.(9), respectively. Since the values of the third and fourth columns in Eq.(10) are not associated with , utilizing the non-trivial components of the third and fourth columns obtains six equations:
where:
Making use of the equation six equations are added as:
where
The calculation based on Eq. (11) and Eq. (12) yields the solution . Because there is no in Eq. (11), as the known variables are substituted into Eq.(13), and then and are found.
where the equation can be replaced by the other scalar equation corresponding to the first or second column. After the solution, we can check whether the first column in Eq.(10) is equal to the second one.
6. Numerical example
Given the mechanism parameters shown in Tab.1 and the pose of the end, as follows:
where the unit of is m, the inverse displacement of the mechanism should be found.
The parameters of a 6R manipulator
i
ai (m)
bi (m)
αi(°)
θi
1
0.12
0
−57
θ1
2
1.76
0.89
35
θ2
3
0.07
0.25
95
θ3
4
0.88
−0.43
79
θ4
5
0.39
0.50
−75
θ5
6
0.93
−1.34
−90
θ6
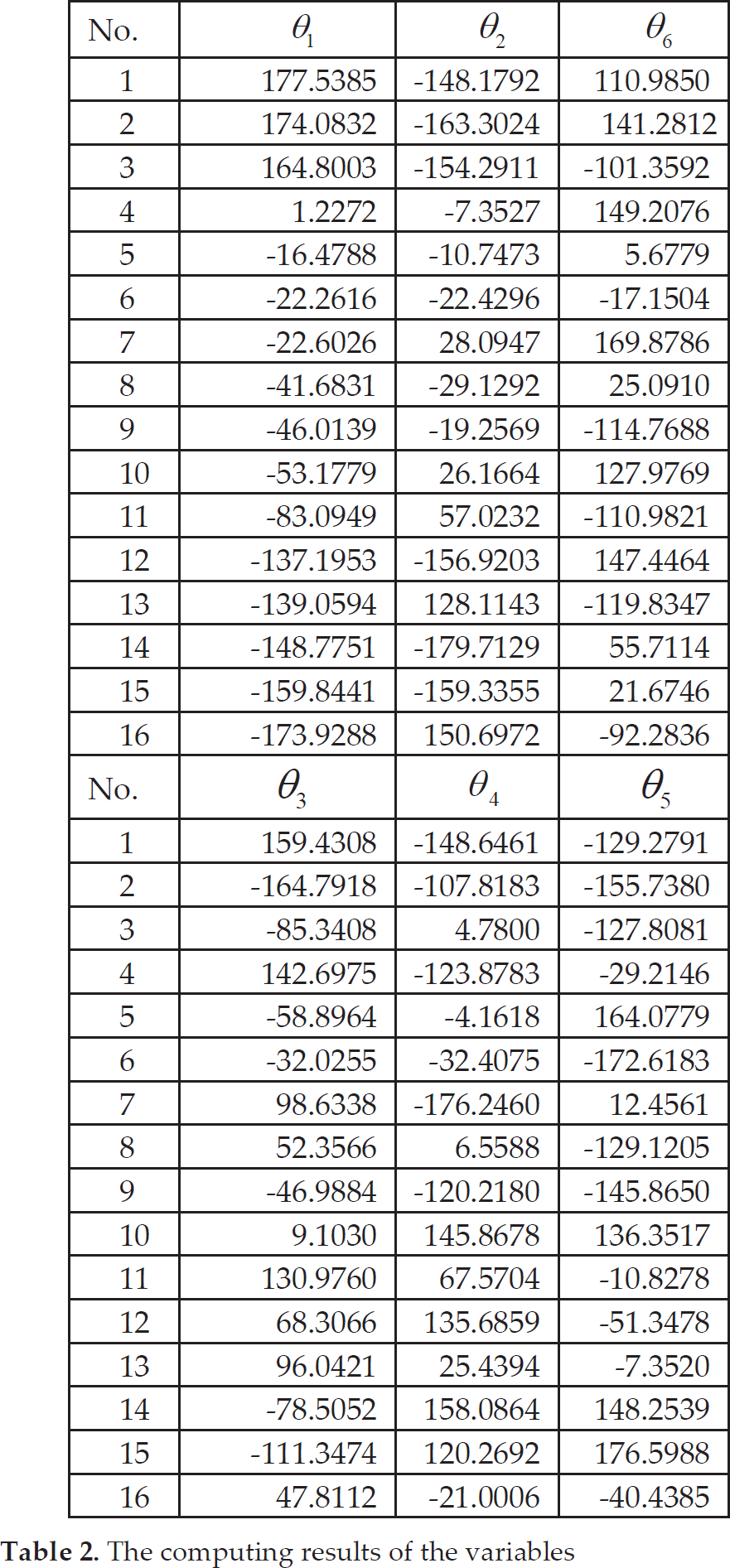
The computing results of the variables
No.
θ1
θ2
θ6
1
177.5385
−148.1792
110.9850
2
174.0832
−163.3024
141.2812
3
164.8003
−154.2911
−101.3592
4
1.2272
−7.3527
149.2076
5
−16.4788
−10.7473
5.6779
6
−22.2616
−22.4296
−17.1504
7
−22.6026
28.0947
169.8786
8
−41.6831
−29.1292
25.0910
9
−46.0139
−19.2569
−114.7688
10
−53.1779
26.1664
127.9769
11
−83.0949
57.0232
−110.9821
12
−137.1953
−156.9203
147.4464
13
−139.0594
128.1143
−119.8347
14
−148.7751
−179.7129
55.7114
15
−159.8441
−159.3355
21.6746
16
−173.9288
150.6972
−92.2836
No.
θ3
θ4
θ5
1
159.4308
−148.6461
−129.2791
2
−164.7918
−107.8183
−155.7380
3
−85.3408
4.7800
−127.8081
4
142.6975
−123.8783
−29.2146
5
−58.8964
−4.1618
164.0779
6
−32.0255
−32.4075
−172.6183
7
98.6338
−176.2460
12.4561
8
52.3566
6.5588
−129.1205
9
−46.9884
−120.2180
−145.8650
10
9.1030
145.8678
136.3517
11
130.9760
67.5704
−10.8278
12
68.3066
135.6859
−51.3478
13
96.0421
25.4394
−7.3520
14
−78.5052
158.0864
148.2539
15
−111.3474
120.2692
176.5988
16
47.8112
−21.0006
−40.4385
After a random number is generated, an initial point of the hyper-chaotic set and the number of hyper-chaotic variables is selected as 13, according to the generalized Hénon hyper-chaotic system in Eq. (1), and the hyper-chaotic sequence including 12 positive Lyapunov exponents was built (the selected chaotic sequence length N was 100. If N is selected as bigger, the computing time would be longer, and if N is too small, it may be that not every real solution would be found. Therefore, in relation to these problems of the mechanism synthesis, N should first be taken as smaller when counted approximately, and then be selected as larger. In general, N is selected at (8–12) times the variable number). After an iterative calculation for 948s, Eq.(8) was solved to find . Then, was converted, as shown in Table 2. These results were the same as, e.g., 8.2.3 of [22]. If solving Eq.(11), Eq.(12) and Eq.(13) from Eq. (9), 16 groups of solutions were found after running for 16.5s. These results were the same as, e.g., 8.2.3 of [22] and the computational efficiency increased greatly. Since the hyper-chaotic Newton iteration method in [15] and the hyper-chaotic sequence from Eq.(1) made the matrix singular, the result was not found. In the mathematical programming method based on hyper-chaos in [18], the fmincon function only obtained two groups of real solutions after running many times, while the fminimax function was only obtained for one or two groups. For the first kind of constraint equations, and were not restricted, i.e., was not used in the solution process, and the variables were dealt with directly. Thus extraneous roots were increased, i.e., there existed . The second type of constraint equation has no extraneous roots by the use of , and so the efficiency of its solution is relatively high.
7. Conclusions
Applying the D-H method, a transform matrix was obtained and the first type twelve constrained equations were established. Then, using the characteristics of the matrix after transforming, six constraint equations were established. Six supplement equations were also established by increasing six variables and the relation of the sine and cosine functions, and the second type of twelve constrained equations for the position analysis were established. Combining the least square method with hyper-chaotic sequences, a hyper-chaotic least square method based on utilizing a hyper-chaotic discrete system to obtain and locate initial points to find all the real solutions of the nonlinear questions was proposed, and the calculation steps solving the inverse displacement analysis of 6R manipulator containing two types of constrained equations were given. Two types of constraint equations can be solved, but the second type of constraint equation has a high efficiency. This method solved the problem that it is divergent when utilizing a Newton iterative method based on chaos and hyper-chaos, the quasi-Newton method, and the hyper-chaotic mathematical programming method. The numerical example shows that this new method is correct and effective. Using this method in the real area, it is more efficient and the result is the same as the homology analysis method. The new method provided in this paper is also suitable for solving the inverse displacement analysis of 7R manipulator.
Footnotes
8. Acknowledgments
This research is supported by the National Natural Science Foundation of P.R. China (No:51075144), the grant of the 12th Five-Year Plan for the construction program of the key discipline (Mechanical Design and Theory) in Hunan province.
References
1.
DuffyJ., Analysis of Mechanisms and Robot Manipulators, Edward Amold, London, 1980.
2.
RothB.RastegarJ.ScheinmanV., “On the Design of Computer Controlled Manipulators, In On the Theory and Practice of Robotics and Manipulators”, First CISM IFToMM Symposium, pp. 93–113, 1973.
3.
TsaiL. W.MorganA. P., “Solving the Kinematics of the Most General Six- and Five-Degree-of-Freedom Manipulators by Continuation Methods”, Transactions of the ASME, Journal of Mechanisms, Transmissions and Automation in Design, 107(2), pp. 189–200, 1985.
4.
RaghavanM.RothB., “Kinematic Analysis of the 6R Manipulator of General Geometry”, In International Symposium on Robotics Research, pp. 314–320, 1989.
5.
WamplerC.MorganA. P., “Solving the 6R Inverse Position Problem Using a Generic-Case Solution Methodology”, Mechanisms and Machine Theory, 26(1), pp. 91–106, 1991.
6.
RaghavanM.RothB., “Kinematic Analysis of the 6R Manipulator of General Geometry”. Proceedings of the 5th International Symposium on Robotics Research, MIT Press, Cambridge, pp. 263–270, 1990.
7.
RaghavanM.RothB., “A General Solution for the Inverse Kinematics of all Series Chains”, Proceedings of the 8th CISM-IFToMM Symposium on Robotics and Manipulators, Cracow, Poland, pp. 24–31, 1990.
8.
RaghavanM.RothB., “Inverse Kinematics of the General 6R Manipulator and Related Linkages”, Proceedings of the ASME, Design Technical Conference, Chicago, Illinois, DE25, pp. 59–65, 1992.
9.
WamplerC. W.MorganA. P., “Solving the 6R inverse position problem using a generic-case solution methodology”, Mech. Mach. Theory, 26(1), pp. 91–106, 1991.
10.
KohliD.OsvaticM., “Inverse Kinematics of General 6R and 5R,P Serial Manipulators”, Journal of Mechanical Design, Transactions Of the ASME, 115(4), pp. 922–931, 1993.
11.
ManochaD.CannyJ. F., “Real Time Inverse Kinematics for General 6R Manipulators”, Proceeding of the 1992 IEEE, International Conference on Robotics and Automation, Nice, France, 1992.
12.
SuH. J.LiaoQ. Z.LiangC. G., “Real-time algorithm of inverse kinematics of the general 6R manipulator based on the algebraic elimination”, Robot, 21(7), pp. 688–693, 1999.
13.
YuY. Q.WangP.LiaoQ. Z., “Position Inverse kinematics of general 6R manipulator”, China Mechanical Engineering, 24(14), pp. 2130–2133, 2003.
14.
LuoY.X.LiD.X., “Finding All Solutions to Forward Displacement Analysis Problem of 6-SPS Parallel Robot Mechanism with Chaos-Iteration Method”, Journal of Chinese Engineering Design, 10(2), pp.95–101, 2003.
15.
LuoY.X.LiD.X.FanX. F.“Hyper-chaotic Mapping Newton Iterative Method to Mechanism Synthesis”, Journal of Mechanical engineering, 54(5), pp. 372–378, 2008.
16.
LuoY.X.LiaoD.G., “Coupling Chaos Mapping Newton Iterative Method and Its Application to Mechanism Accurate Points Movement Synthesis”, Journal of Chinese Mechanical Transmission, 31(1), pp. 28–30, 2007.
17.
LuoY.X.LiX.F.LuoL.L., “The Research of Newton Iterative Method Based on Chaos Mapping and its Application to Forward Solutions of the 3-RPR Planar Parallel Mechanism”, Chinese Machine Design and Research, 23(2), pp.37–39, 2007.
18.
LuoY.X., “Hyper-chaotic Mathematical Programming Method and its Application to Mechanism Synthesis of Parallel Robot”, Transactions of the Chinese Society for Agricultural Machinery, 39(5), pp.133–136, 2008.
19.
WolfJ. B. SwiftSwinneyH. L., “Determining Lyapunov exponents from a time series”, Physical D Nonlinear Phenomena, 16(3), pp. 285–317, 1985.
20.
ZhaoM.HuangD. Y.PengJ. H., “Generalized synchronization of generalized Hénon maps”, Journal of Shenzhen University (Science & Engineering), 21(1), pp. 19–23, 2004.
21.
ZhangJ.Y., Mathematical methods of mechanics. Shanghai Jiaotong University Press, Shanghai, 2003.
22.
SongW.G., The principle theory, methods and algorithms of the robot mechanical system, Mechanical Industry Press, Beijing, 2004.