
Abstract
Parallel robots exhibit salient merits over their serial counterparts in applications where both accuracy and dynamic response are required. However, due to the strong dependence of geometric parameters and their performances, the corresponding design problems for the parallel robots are much more complex and the adequacy and effectiveness of the design method become more critical. In this paper, a study in the design optimization for a class of planar parallel robots is presented. The robots feature an in-parallel structure with two degrees of freedom. Dimension synthesis is performed through maximization of two key performance characteristics, addressing not only workspace but also dexterity of the robots under consideration. Optimal designs are attained using both parametric study and simplex algorithm. Results are shown by way of computer simulations aided with graphic visualizations.
Introduction
In robot design as well as control coordination, workspace and singularity characteristics are two important geometric properties that should be considered. The workspace is the region which the end-effector can reach with at least one orientation, whereas the singularities are special geometric configurations inherent to the workspace at which the manipulator can lose–if actuated in series, or gain–if actuated in parallel, one or more degrees of freedom.
Being able to avoid the singularities is more critical in practice for parallel manipulators than their serial counterparts due to potential control uncertainty associated with the unwanted, albeit instantaneous, mobility even with all actuators locked. Such uncertainty also manifests itself in poor force transmission performance, in that the manipulator cannot effectively resist or apply forces or torques at the end-effector in certain direction. Ideally a robot should have as large a workspace and as small a density in singularity as possible, both being functions of robot geometries. Attaining such a kinematic property requires a dimension synthesis process through some optimization.
Many researchers have addressed the topics of workspace and singularity of parallel manipulators. For examples, the boundary of the dexterous workspace for a 3-DOF planar parallel manipulator was determined by geometric reasoning in [1]. Geometric algorithms were presented to obtain the maximal as well as the total orientation workspace for a similar type of manipulator [2]. For a broader class of parallel manipulators, a study to classify the various shapes of workspace due to changes in link length was reported in [3]. Representative theoretical studies on the singularity of parallel manipulators can be found with geometrical approach, by use of the Grasmaan geometry [4], screw theory [5], or using related line geometry [6]. And in [7] this author reported a study of workspace and singularity characteristics for two common types of 3-DoF planar parallel manipulators, in which the complete workspace and the singularity inherent to the systems were characterized using computer simulations based on a simple direct search algorithm aided with graphic visualization. Both the workspace and the singularity related properties have been, individually or together, as primary objectives in many optimal design studies for parallel robots. For examples the workspace was used solely as the metric of optimization in [8],[9] whereas indices of singularity, stiffness, and accuracy were used either in composite (e.g., as a weighted sum in [10],[11]) or multi-criteria form in optimal design [12].
In this paper, a study in the design optimization for a class of planar parallel robots is presented. The robots feature an in-parallel structure with two degrees of freedom. Dimension synthesis is performed through optimization of two key geometric properties, namely addressing not only workspace but also dexterity of the robots under consideration. A convenient composite index, defined as the ratio of the total available workspace to the density of singularity within that workspace, was developed in [7] to help inform the way in which both characteristics vary with respect to various geometric parameters. The proposed index, considered as a more proper representation of the overall dexterity of the robot, is adopted as the metric for optimal design in this study. A solution to optimal design is arrived at and validated by using both the parametric variations and the simplex algorithm independently. Results are shown by way of computer simulations aided with graphic visualizations.
System Model
The robot of interest is a two-degree-of-freedom five-bar planar parallel robot (see Fig. 1). The robotic mechanism consists of a point P ('wrist') supported by two articulated arms. Each arm is composed of two links connected by five revolute joints between the links (at points A and B, P) and to the ground (points Oi and O2).
The link lengths of each two- link arm are L and m, respectively. Point Q is the tool center point which is located at βm from the wrist point P along the upper right arm.

The 5R planar parallel robot
The robot is driven by the two angles θ2 and θ2. Each set of (θ2, θ2) corresponds to a scalar couple (X, Y) which represents coordinates of the tool point Q. The following derives the expressions of X and Y in terms of θ2 and θ2. The coordinates of point Q can be expressed, from the side O1O2BQ and the side O1APQ, as:


Isolating the cosθ3 and sinθ3 terms from the second equations above, then squaring and adding the two resulting equations to eliminate θ3, the following expression is obtained:

where

Equation (3) is a linear trigonometric equation, which can be solved by using the tan-half angle transformation to give two closed form solutions of cosθ4 and sinθ4 in terms of θ2 and θ2. Then by equations (1) and (2), the position coordinates of tool point Q can be obtained. The forward kinematic solution is necessary to help visualize the robot corresponding to any given set of inputs θ1 and θ2. The two possible configurations corresponding to a given set of input angles (θ1, θ2) are illustrated in Fig. 2.

Two configurations for the same inputs ( θ 1, θ2)
The inverse kinematics solution specifies the expressions of θ1 and θ2 in terms of the tool point coordinates (X, Y). The closed form expressions for θ1 and θ2 are derived next. Starting from the left branch, equations (1) and (2) is rewritten as:


Summing the squares of (4) and (5) gives:

Equation (6) again is a linear trigonometric equation in θ2, which can be solved, similar to equation (3), to yield two solutions of cosθ2 and sinθ2. From equations (4) and (5), the following expressions for θ4 can be obtained:


Now considering equations for the right branch in equations (1) and (2), we have:


The sum of the squares of equations (9) and (10) gives:

where

Equation (11) again yields two solutions for θ1. Thus there are four possible configurations for the robot to reach a given point (X, Y). Note that, because singularity is a property of geometric configuration, the robot can be at singularity in any one of the four configurations.
The kinematics equation relating the velocity of the tool point and the input joint rates, is characterized by a linear mapping matrix J, known as the Jacobian. The Jacobian is required for the characterization of geometric singularities of the system. This section specifies the Jacobian for the planar robot under study.
To derive the Jacobian matrix, equations (6) and (11) are differentiated, respectively:


where

In order to express

Upon substitution and arrangement, equations (12) and (13) can be written using the matrix form:
That is,

where

And
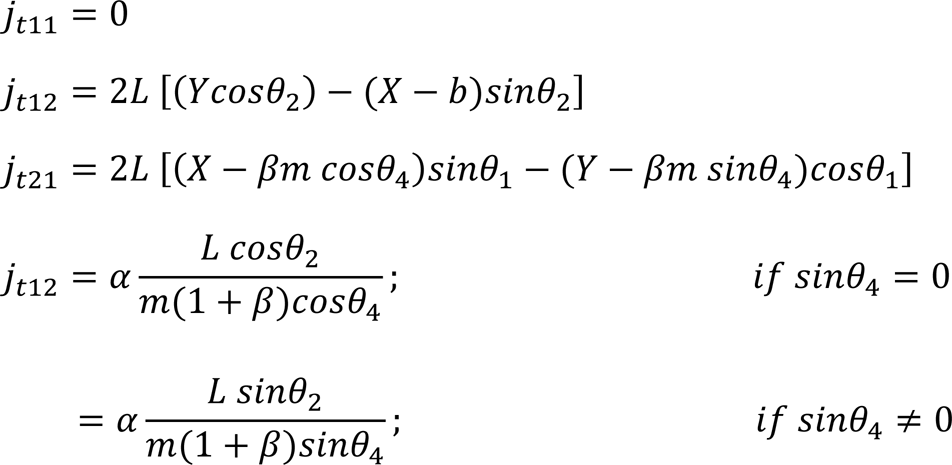
Finally the Jacobian matrix J can be obtained as:

Workspace and singularity are the two most important properties that are of concern in geometric design of robot. In the case for the 2D robot being considered, the former is the collection of all the points reachable by the tool points and the latter corresponds to the configurations in which the robot becomes singular (gaining a transitory degree of freedom at uncertainty configuration).
Workspace Analysis
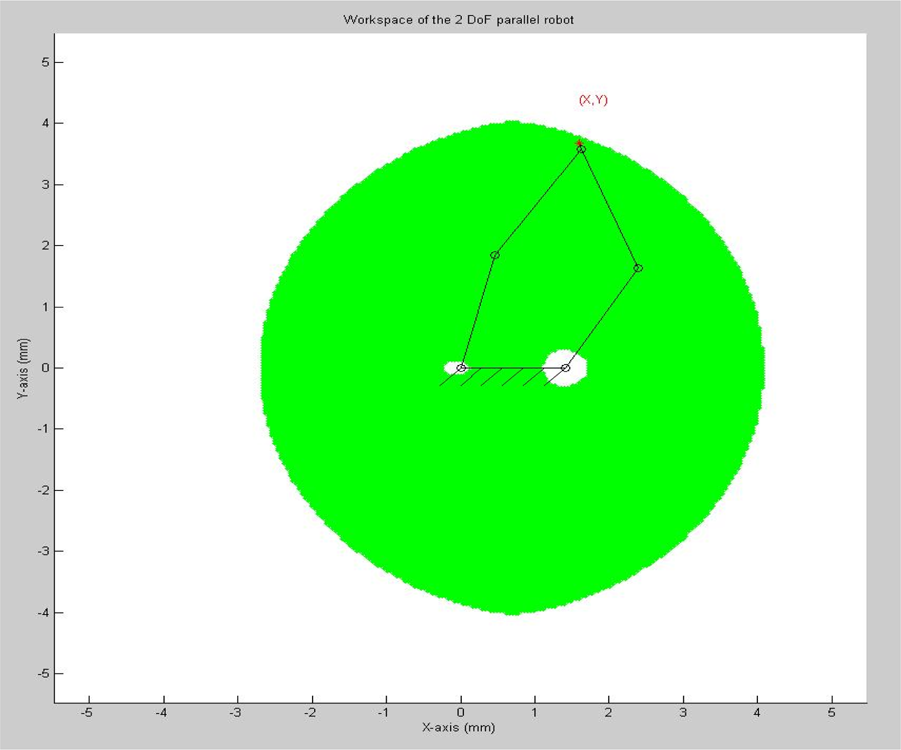
The inverse kinematic solution is used in the studies for the workspace of the robot. Indeed, given the coordinates (X, Y) of any point in the region, it can be determined if it belongs to the workspace or not by verifying if at least one solution for θ1 and θ2 exists. The workspace can be evaluated by using a direct search algorithm which essentially ‘grids’ the potential region in conjunction with checking the existence of an inverse kinematics solution for the robot. Such an algorithm has been used to study the workspace characteristics of a class of three degree of freedom robots [7].

Workspace of the 2 DoF robot
Fig. 3 shows the workspace of the robot obtained using such an algorithm implemented using Matlab based on the inverse kinematics solution. One advantage of this approach is that it allows for effective quantification of workspace area as well as singularities.
When the tool point Q is at a singular point of the workspace, the robot is actually in a uncertainty configuration in which it is uncontrollable. It is necessary to identify so as to avoid all such configurations in planning a trajectory for the robot. As such characterization of singularity is just as important as that of workspace, and some optimization of singularity should be taken into consideration in the design of robot.
There are several indexes that characterize the degree of singularity; the determinant-based manipulability and the (reciprocal) condition number of the Jacobian, are the two commonly used ones. When the determinant of the Jacobian is equal to zero, the robot is at singularity. However, the magnitude of the determinant cannot be used as an appropriate measure of the degree of ill-conditioning. To this end the better metric to use is the reciprocal condition number of the Jacobian. The condition number based index, icd, is bounded between 0 and 1. Obviously, the conditioning index depends on the joints coordinates of the manipulator and therefore it is posture-dependent. As each tool point is being identified through the workspace analysis, the icd for corresponding Jacobian can be readily computed to characterize the singularity-degree of each point in the workspace.
In this study, the robot is considered being at or near a singularity when icd <0.01. A Matlab program was used to generate a graph which gives the robot workspace and its degree of singularity of each tool point as follows (see Fig. 4):

Workspace and singularities of the 2 DoF robot

Ambiguity of singular configuration due to multiplicity of solutions for the same tool point
Recall that there are four possible robot configurations for the same point of the workspace. Therefore, there are four different Jacobians and thus four different icd's for each point of the workspace. This fact complicates the characterization of singularity and, if only one of the solutions is considered during the study, an incomplete or even mistaken conclusion could result. For example in Fig. 5, the first of the four possible configurations is at singularity whereas the others are clearly not.
In robot design, an ideal geometry is one that has the widest workspace possible and the fewest singularities in its workspace. Indeed, from a motion planning point of view, a robot with a large workspace filled with many singular points, is just as undesirable as one that has a small workspace. In this study, an optimal design of the 2 DoF planar 5R robot is obtained for its link lengths by taking both the workspace and singularity properties into consideration. This is realized through the use of a composite index relating the two properties as proposed previously in [7].
The composite index, named as the overall dexterity index, is calculated by taking the ratio of two metrics, namely a percentage measure of the workspace relative to a specific reference (chosen by the designer) and a percentage measure of the extent of singularity relative to the workspace. Since both properties of workspace and singularity are functions of dimensions and geometric configuration of the robot, the design problem for a chosen robot configuration becomes one of finding the set of link dimensions that maximize the dexterity index.
Thus the design optimization problem, specifically for the 5R planar robot considered here, can be stated as:
Find the link lengths b, L, m and βm that maximize an objective function that quantifies the overall dexterity of the robot.
In the evaluation of the objective function based on the above dexterity index, the percentage of workspace is obtained from the ratio of actual robot workspace area relative to a reference area given by a circle with a radius of (L+m+βm), which corresponds to the widest area the robot could cover if it had only one arm.
The robot workspace area is obtained by associating a small area to each point of the grid in a target window, where 2L max is the size of the target window (x and y ranging from −L max to +L max ) and n is the discretization precision (the number of points in one axis). The workspace area is computed by multiplying this small area with the number of points for which the inverse kinematics solutions exist. The percentage of singularities is obtained from the ratio of area based on the collection of those singular points (with icd less than 0.01) and the area of the robot workspace.
Optimization by Parametric Variations
The design problem of interest here is one of multivariable nonlinear optimization type. A basic approach to finding a solution is by means of parametric variation, where a candidate solution vector is generated by locating the optimal value for each parameter while keeping all others fixed, which candidate solution is then used as the new basis for iteration by repeating the aforementioned process to generate the next candidate. The process stops until convergence is attained. This method is similar to the successive substitution method for root finding applications, which is tedious in its process but quite effective in finding a solution.
In this case a candidate value for each of the link parameters is identified numerically by characterizing participation of each parameter in the dexterity for which a graph may be generated as a function of a varying parameter while keeping all other parameters fixed; the value corresponding to the greatest dexterity is then reported.
The optimization process is demonstrated in the following with a discretization precision of 100 points in the X-axis and the Y-axis. All link lengths, namely b, L, and m, referred to heretofore may be of any convenient unit as long as they are consistent, and β is a dimensionless parameter that sets the length of the end effector.

Influence of β in the dexterity - optimal at β = 0.05

Influence of L in the dexterity - optimal at L = 1.9

Influence of m in the dexterity - optimal at m = 1.5
Notice that in Fig. 7, the dexterity values are abnormally high for L <0.5b, which was found to be the natural effect of small values in the denominator due mainly to the fact that there is almost no singular point in the workspace. This configuration, however, cannot be considered as optimal because the workspace is extremely limited and disjointed (Fig. 10). Also it can be noted in Fig. 9 that the dexterity jumps for b > 6 (or 2L), which can be attributed to the phenomenon of workspace changing from one to two regions, similar to that illustrated in Fig. 10.

Influence of b in the dexterity - optimal at b = 1.8
From these graphs, the optimal values for the four design parameters can be identified as: b = 1.8, L = 1.9, m = 1.5, β = 0.05.

An example of singularity-free solution
▪ Workspace area: 40.9480
▪ Normalized area ratio: 0.7735
▪ Singularity percentage: 0.0444
▪ Dexterity: 17.4036
Workspace of the optimized 2 DoF robot
The foregoing optimization, being a multi-variable, unconstrained optimization problem, can also be solved using a direct search algorithm available from the Matlab function: fminsearch. The method uses the concept of a simplex, which is a polytope of N+1 vertexes in N dimensions: a line segment in one dimension, a triangle in two dimensions, a tetrahedron in three-dimensional space and so forth. The simplex algorithm is a direct search optimization method that begins at a starting vertex and moves along the edges of the polytope until it reaches the vertex of the optimum solution.

Singularity characteristics of the optimized 2 dof robot
In order to corroborate the result obtained previously ‘by hand’ the optimization was carried out using the built-in Matlab function with a precision of 100 for the discretization.
The optimization process was executed using the same initial guess as before; namely b = 1, L = 3, m = 2, β = 0.3. The following optimum is returned by the fminsearch algorithm: b = 1.0545, L = 2.8806, m = 2.0228, β = 0.3074, which corresponds to a dexterity of 11.6828, a value different from the optimum found previously. This shows that if the previous result is correct, the direct search simplex algorithm did not find the true optimum but only a local optimum close to the initial guess; this is no doubt a pitfall of the simplex algorithm.
To validate the result found previously ‘by hand,’ a second iteration is executed using those values found by parametric variations as a new set of initial guess. The following optimum is obtained: b = 1.4052, L = 1.9017, m = 2.1007, β = 0.0501, corresponding to dexterity of 17.9350. Comparing these to the values found by hand, it can be concluded that both results corroborated with each other.
One may wonder whether if the number of discretization used will affect the results. To investigate the effect, a different number for the discretization is used (n = 200, namely 40,000 points). Again using the optimal values found by hand as initial guess, the following optimum is obtained: b = 1.4599, L = 1.8998, m = 2.1262, β = 0.0500. And the corresponding dexterity is 15.8167.
It is noted that the new dexterity value is lower than the one found with n = 100 using the same initial guess (which was 17.4036) whereas the optimal parameters are practically the same. The lower value for the dexterity is expected due to use of a finer grid in area calculations. Having the same optimal parameters indicates that changing the precision did not affect the optimal values for the parameters found by the direct search simplex algorithm but only improves the corresponding dexterity.
The problem and solution of an optimal design for a 2-DOF planar parallel manipulator were presented in this paper. Using numerical simulations, the complete workspace and singularity were evaluated first. Then using a dexterity index which quantifies the overall interplay between the workspace and the singularity, the design optimization were carried out two ways, first by the method of parametric variations and then the simplex direct search algorithm. An optimal design was obtained and validated as a result. Moreover, it is found that parametric variations could provide additional insights into the interactions between the geometric parameters explicitly, which insight could also serve to inform and guide the automatic optimization process toward finding the global optimum. All results were presented graphically to facilitate visualization. It is noted that the work presented here dealt only with design optimization related to robot geometry; it did not explicitly address other kinematic aspects such as singularity avoidance in path planning.
Footnotes
6.
Acknowledgment is due to SLT Henri Nicolas of the French Military Academy, St. Cyr, for his contributions in generating the simulation results.