
Abstract
To deal with the problem of the output feedback tracking (OFT) control with bounded torque inputs of robot manipulators, we propose a generalized fuzzy saturated OFT controller based on singular perturbation theory. First, considering the fact that the output toque of joint actuators is limited, a general expression for a class of saturation functions is given to be applied in the control law. Second, to carry out the whole closed-loop control with only position measurements, linear and nonlinear filters are optionally involved to generate a pseudo signal to surrogate the actual velocity tracking error. As a third contribution, a fuzzy regulator is added to obtain a self-tuning performance in tackling the disturbances. Moreover, an explicit but strict stability proof of the system based on the stability theory of singularly perturbed systems is presented. Finally, numerical simulations on several sample controllers are implemented to verify the effectiveness of the proposed approach.
Introduction
For tracking problem of robot manipulators, it is crucial to overcome the situation of noisy velocity and acceleration measurements in actual working conditions. Output feedback tracking (OFT) controllers, which estimate those signals from position feedback signals and make the whole closed-loop control with only position measurements, have aroused increasing concerns in motion control related researches, especially the saturated OFT controllers for robot manipulators with bounded joint torque inputs (Loria and Nijmeijer, 1998, Moreno-Valenzuela et al., 2008a, Liu and Zhu, 2009).
With a review of previous studies, to solve the saturation problem caused by the limited power of the joint actuators, the most common method is to apply hyperbolic tangent function in the control law (Llama et al., 2001, Loria and Nijmeijer, 1998, Moreno-Valenzuela et al., 2008b, Moreno-Valenzuela et al., 2008a, Santibanez and Kelly, 2001, Moreno-Valenzuela et al., 2010). The first saturated OFT controller was proposed in (Loria and Nijmeijer, 1998), where the hyperbolic tangent function was invoked in the control law to ensure the bound of the torque input, and a pseudo velocity error signal was obtained from a nonlinear filter containing only position tracking error, guaranteeing the whole closed-loop control without velocity or acceleration measurements. In (Santibanez and Kelly, 2001), a supplement considering the viscous friction at the robot joints was made to this scheme, to proved that the global asymptotic stability can be assured if large enough damping is presented. Afterwards, a general expression of a class of saturation function was defined by Moreno-Valenzuela et al. (2008a) in an attempt to generalize the results of Loria and Nijmeijer (1998), based on it, a uniform expression of a class of saturated OFT controllers was proposed, but it added an extra restriction on the permitted range of the velocity error by the nonlinear filter, which was used to achieve the OFT control. Motivated by it, a more generalized expression with a linear filter to generate the pseudo velocity error signal was given in (Liu and Zhu, 2009). Furthermore, as a particular case of the generalized controller proposed in (Liu and Zhu, 2009), a saturated OFT controller with error-gain contained arctangent function and fuzzy proportional and derivative (PD) regulator in the control law was designed in (Liu et al., 2010) to gain a more satisfactory dynamic tracking performance. More importantly, the stability theory of singularly perturbed systems was introduced to make an explicit stability proof of the saturated OFT controller (Moreno-Valenzuela et al., 2008a, Moreno-Valenzuela et al., 2008b, Liu et al., 2010, Liu and Zhu, 2009). It is remarkable that the singular perturbation theory was first used to tackle OFT control by Burkov (1998), but without mentioning the torque saturation problem.
With respect to the applications of fuzzy strategy, a saturated tracking controller equiped with a fuzzy PD regulator was contributed in (Llama et al., 2001), but it is a state feedback controller rather than a output feedback controller. Another fuzzy approach was proposed recently in (Santibanez et al., 2005), yet it aimed only to solve the set-point control problem. It seems that the design of fuzzy OFT controllers and the stability analysis of them become more complicated when encountering with robot manipulators subject to input saturation, let alone give a general formula of them (Andrieu and Praly, 2009, Hernandez-Guzman et al., 2008).
In this paper, we focus on finding a general expression of a class of fuzzy saturated OFT controllers, with achieving simultaneously both system stability and satisfactory tracking performance. In Section 2 the robot dynamics and some useful properties are presented. In Section 3 a class of saturation functions are given. Section 4 deals with the design of a generalized saturated OFT controller via fuzzy self-tuning PD. Section 5 presents a stability proof of the proposed controller from the perspective of singularly perturbed systems. In Section 6 simulation comparisons are made among several fuzzy OFT controllers. Finally, some conclusions are given in Section 7.
Notations: throughout this paper, ||x|| and ||X|| stand for the Euclidean norm of vector x and induced L2 norm of matrix X, respectively; xm and xM denote the minimum and maximum values of variable x, respectively; δm{X} and ΔM{X} stand for the smallest and largest eigenvalues of matrix X, respectively.
Dynamic Model and Properties
Dynamic Model
The dynamics of rigid serial n-link robot manipulator with revolute joints can be written as:

where
Some useful properties on robot dynamic model (1) are listed as follows (Kelly et al., 2005).






To make the torque inputs bounded, applying appropriate smooth saturation function in the control law is a preferred solution (Liu and Zhu, 2009, Liu et al., 2010, Loria and Nijmeijer, 1998, Moreno-Valenzuela et al., 2008b, Moreno-Valenzuela et al., 2008a, Santibanez and Kelly, 2001, Santibanez et al., 2005). It is noteworthy that, recently a continuous piecewise-differentiable increasing function was invoked in (Huang et al., 2008) to achieve the boundedness of the tracking control law, but it cannot ensure continuous differentiation at the section point, which may enable unsmooth torque outputs of the joint actuators, so as to exert flexible impact on the joint mechanism. Motivated by (Moreno-Valenzuela et al., 2008a), we have found a class of more general saturation functions (Liu and Zhu, 2009).
Define Sat(
sat(x
i
, σ
i
) is a monotone increasing function in a real domain, i.e., ∂sat(x
i
, σ
i
)/∂
x
i
> 0, ∀ x
i
∊ R. sat(x
i
, σ
i
)x
i
0, if and only if x
i
= 0 and sat(x
i
, σ
i
)=0, that sat(x
i
, σ
i
)x
i
= 0, ∀ x
i
∊ R. |sat(x
i
, σ
i
)| p, ||Sat( σM|| Sat( There always exists a large enough constant α2 > 0, for all For all
As the properties above described, the improvements compared with (Moreno-Valenzuela et al., 2008a) can be summarized: we apply an extra positive gain “at” to change the approaching behavior to saturation for function “sat(x i , σ i )”, and define a generalized relationship more than multiplication and division between x i and σ i . Obviously, atan(σ i x i ) (Liu and Zhu, 2009, Liu et al., 2010) and tanh(σ i x i ) (Moreno-Valenzuela et al., 2008b, Loria and Nijmeijer, 1998, Moreno-Valenzuela et al., 2008a) are particular cases of sat(x i , σ i ).
Control Goal
The control objective is to design a controller with bounded inputs |τ
i
|<τ
iM
, i=1, 2, …, n, which guarantees the joint displacements

where
In addition, we assume

To carry out the trajectory tracking control with only position measurements, we use filter to generate pseudo signal ξ from the position tracking error
In linear form, the filter is designed as

which is made up of two implementable parts:

While in the nonlinear form, the filter can be given as

which is made up of two implementable parts:

where
To facilitate the expressions, we use

where
By (4), (7), (9) and iii), the boundedness of the control input is assured with satisfying

where
To improve the dynamic performance of the controller, a fuzzy self-tuning regulator is added to make
The block diagram of the fuzzy self-tuning regulator is shown in Figure 1.

Structure of fuzzy self-tuning regulator
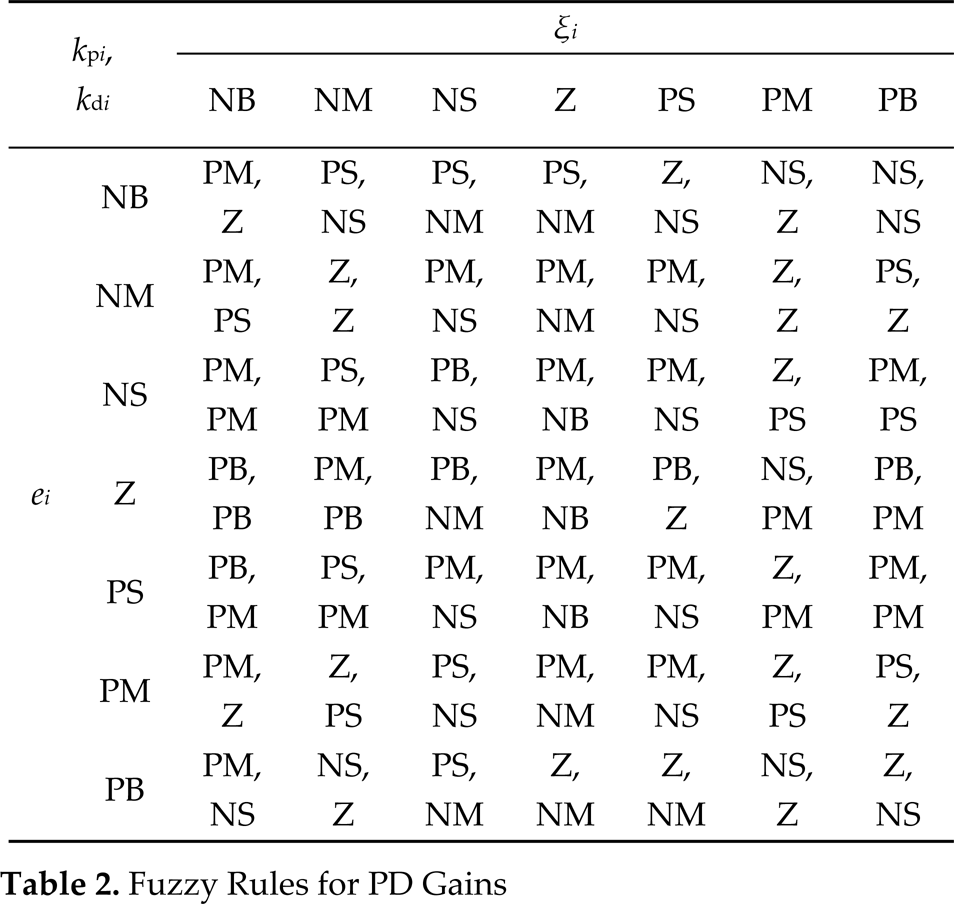
IF e
i
is A
i
AND ξ
i
is B
i
, THEN k
pi
is C
i
AND k
di
is D
i
.
where A i , B i , C i and D i are certain elements of linguistic terms such as {NB, NM, NS, Z, PS, PM, PB}.

where k, as output of fuzzy regulator, denotes k pi or k di , k i is the element in physical universe of discourse of k, u i is the degree of membership of k i .
Remarkably, when selecting PD gains, it is difficult to achieve simultaneously system stability and good performance (Hernandez-Guzman et al., 2008). In the flowing section, we will provide some constraints on the outputs of the fuzzy self-tuning regulator, to ensure both the exponential stability and satisfactory tracking performance of the system.
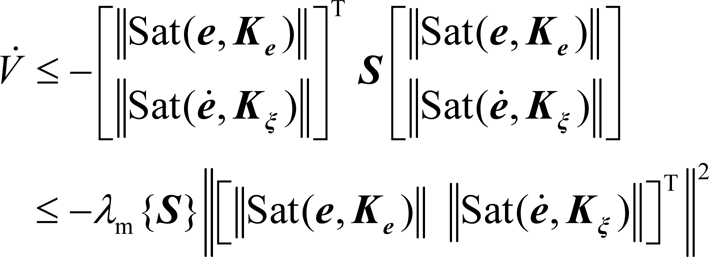
The theory of singularly perturbed systems (Khalil, 2007) is applied in this part to give a brief but strict stability proof of the proposed controller (Moreno-Valenzuela et al., 2008b, Moreno-Valenzuela et al., 2008a).


where
f(t, The equation g(t, The functions f, g, h and their partial derivatives up to the second order are bounded for The origin of the reduced system
is exponentially stable. The origin of the boundary-layer system


is exponentially stable, uniformly in (t,
Then, there exists ε* > 0 such that for all ε* > ε, the origin of (17) and (18) is exponentially stable (Khalil, 2007).
Ordering


In the meantime, (10) and (12) can be written as follows, respectively.

When ε = 0, easily we can find (23) has an isolated root
Substitute the roots into (22), respectively, we can obtain


Then, (21) and (25) build up a reduced system (slow model) in the form of (19), while (21) and (26) build up another one.
For (23), let

where
Similarly, (24) can be written as a boundary-layer system (fast model) corresponding to the reduced system (21) and (26):

is satisfied, then there always exists ε* > 0 such that for all ε* > ε, the state space origin of the system (21)∼(23) is exponentially stable.
Ordering ε = 0, we can obtain the unique isolated root of (23): Determine that the right sides of (21)∼(23) and their partial derivatives up to the second order are bounded for Stability of the reduced system (21) and (25). The state space origin [
where the constant v > 0 is small enough to ensure the positive definiteness of Lyapunov function V.
Applying properties 2 and iiv), we obtain the inequality

Therefore, it can be shown that, ∀

After taking the time derivative of (30), substituting (25) for
where the time derivative of the first part on the right of (30) can be written as
According to properties 1∼3, i)∼vii) and the inequality
where the entries of matrix

Specifically, if

then the positive definiteness of S is guaranteed.
In addition, by properties 2, vi), and vii), with the same method of obtaining (34) we can obtain the inequality

where
Then, from (34) and (36), we can obtain
i.e., ∀[
Stability of the boundary-layer system (27). We define a Lyapunov function W(δ, ξ) (written as W for short):

where the constant ω is small enough.
The scaled time derivative of W is given by

So the exponential stability of the boundary-layer system (27) is guaranteed uniformly in (t,
Till now, all five assumptions in Theorem 1 are satisfied. Consequently, there always exists ε* > 0 such that ∀ ε* > ε and [
Importantly, to ensure the continuous stability of the overall system and the boundedness of the torque control inputs. For the fuzzy regulator referred in Section 4.3, all the output values of kpi and kdi should be restricted by (15) and (29).
In this part, simulation comparisons between several fuzzy OFT controllers on a two-link direct-driven robot manipulator (see Figure 2) are presented to verify the effectiveness of the proposed approach.

A two-link direct-driven robot manipulator
The dynamics of the robot manipulator are given as

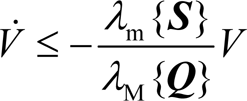
Without loss of generality, the desired position trajectories for each joint are given as
Obviously, we can find that arctangent function atan(σ i x i ) (Liu et al., 2010, Liu and Zhu, 2009) and hyperbolic tangent function tanh(σ i x i ) (Moreno-Valenzuela et al., 2008b) are two particular cases of the saturation function sat(x i , σ i ). As shown in Figure 3, in response to increasing values of σ i , the zero-crossing slopes of function atan(σ i x i ) and tanh(σ i x i ) steeply increase and rapidly approach saturation. Function atan(σ i X i ) has a wider range of (−π/2, π/2) than (−1, 1) of function tanh(σ i x i ), and results in a more moderate approach to saturation for the same value of σ i . These features have been proven to be helpful in improving the tracking performance (Liu and Zhu, 2009). Some other sample saturation functions such as x i (x i 2 + 3)−1/2 and x i [ln(cosh x i ) + 3]−1 (Moreno-Valenzuela et al., 2008a) are also shown in Figure 3.

Curves of sample saturation functions
According to (14), (10) and (12), several sample controllers are given as
Controller “atan-linear”:

which was proposed in (Liu et al., 2010), is a particular case of the generalized fuzzy OFT controller.
Controller “atan-nonlinear”:

where Atan(
Controller “tanh-linear”:

which has the similar form of the controller proposed in (Moreno-Valenzuela et al., 2008b).
Controller “tanh-nonlinear”:

which has the similar form of the controller proposed in (Moreno-Valenzuela et al., 2008a).
In addition, the controller proposed in (Loria and Ortega, 1995) (called “none-linear”) can be written as

To make fair comparisons, we apply the same gains:

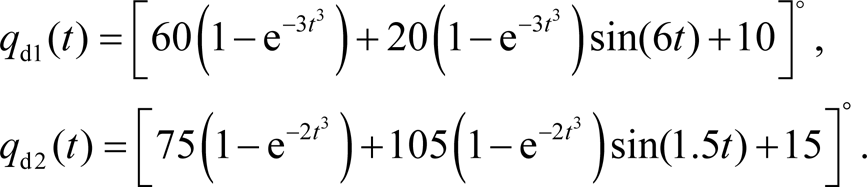
The parameters and fuzzy rules for the inference of the fuzzy PD self-tuning regulator are set as shown in Tables 1 and 2, respectively.
Parameters of the Fuzzy PD Regulator
Fuzzy Rules for PD Gains
The architecture comparison of the five controllers is shown in Table 3.
Architecture Comparison

Furthermore, to test the anti-disturbance capability of the controllers, we applied man-made step torques as external disturbances during the 7th second of the total execution time 16s, with amplitudes of 0.6 N.m to the first joint and 0.2 N.m to the second one.
To make overall appraisement to the performance of each controller, we adopt five criteria as follows:
Adjusting time – a period from the start to the moment tracking error e i falls into the area of ±0.05°;
Overshoot – the maximum value of |e i | during the adjusting procedure;
Recovery time – a period from the end of disturbances to the moment tracking error e i falls into the area of ±0.05°;
Maximum deviation – the maximum value of |e i | from the start of disturbances to the end of the recovery procedure;
Maximum torque – the maximum value of |τ i | during the whole procedure.
As shown in Figures 4, 5 and Table 4, controller “atan-linear” has the shortest adjusting time and recovery time, the smallest maximum deviation, and a relative small overshoot, representing superior capacity of dynamic response and anti-disturbance to the others with continuous asymptotic stability. This is because we applied a fuzzy PD self-tuning regulator whose outputs, kpi and kdi, are properly constrained by (15) and (29), and invoked a saturation function with a more moderate approach to saturation and wider range, arctangent, in the control law.
Performance Comparison


Tracking error of the first joint

Tracking error of the second joint
Moreover, as shown in Figures 6, 7 and Table 4, controller “atan-linear” has the smallest maximum torque control input, while controller “none-linear” fails to keep the initial torque inputs in the given limited range, with maximum torque of about 593 Nm to the first joint and 119 Nm to the second one, just for the reason that there is no saturation function in the control law to create bounded inputs as the other controllers.

Torque input of the first joint

Torque input of the second joint
In this paper, a generalized fuzzy saturated OFT controller has been developed for the trajectory tracking for robot manipulators with bounded torque inputs to the joint actuators. A general saturation function is invoked in the control law to ensure the boundedness of the torque inputs, and linear/nonlinear filters are optionally applied in the closed-loop control to eliminate the velocity measurements. A fuzzy regulator is used to make the PD gains vary as the position and pseudo velocity tracking errors change with time. More importantly, we made a brief but strict stability proof for the whole nonlinear systems by the stability theory of singularly perturbed systems. Benefiting from it, some proper constraints on certain gains have been obtained to ensure both the exponential stability and satisfactory tracking performance of the system. Based on the general formula of the proposed controller, several sample controllers were given to test the tracking performance. The comparison reveals that all the controllers work efficiently, and the “atan-linear” controller, which involves arctangent as the saturation function and linear filter in the control law, has better performance than the others.