
Abstract
This paper represents the relationship between the stability of stairs climbing and the centroid position of the search and rescue robot. The robot system is considered as a mass point- plane model and the kinematics features are analyzed to find the relationship between centroid position and the maximal pitch angle of stairs the robot could climb up. A computable function about this relationship is given in this paper. During the stairs climbing, there is a maximal stability-keeping angle depends on the centroid position and the pitch angle of stairs, and the numerical formula is developed about the relationship between the maximal stability-keeping angle and the centroid position and pitch angle of stairs. The experiment demonstrates the trustworthy and correction of the method in the paper.
Introduction
Search and rescue robot is a special type robot which is used in the search and rescue works after the nature or man-made disasters, such as an earthquake, hurricane, debris and mine collapse. Many researchers have paid more attention on the search and rescue robots. Most work is about the architecture of the robotic system and some types of autonomous methods. The design method and architecture of a search and rescue robot are given in recent years (Ko, A., Lau, H., 2009). Some researchers focus on the automation navigation in the field environment (Guo, Y., Song, A., Bao, J., Tang H., Cui, J., 2009). Identified from the other common mobile robot, the search and rescue robot always works under the unstructured environment that means the complex and changeable work situations, so the excellent traveling ability is requested and domain its applications. In all hard work situations which are research hot points and difficult points, the stairs climbing is one of them. Relate works always focus on how to climb the stairs and the stability of the climbing process and the stability of the robot during the climbing basically determines the performance of the search and rescue robot. Some groups work for design a novel structure of the robot to achieve the stairs climbing (Woo, C. K., Choi, H. D., Yoon, S., Kim, S. H., Yoon, K. K., 2007), but the complex mechanisms will lead to the reduction of reliability. Some groups are working to find the methods that autonomously climbing the stairs for the robot (Pinhas, B. T., Ito, S., Goldenberg, A., 2009) (Kim, B. S., Vu, Q. S., Song, J. B., Yim, C. H., 2010). However, the autonomous methods have too much limitation of the environment constrains, and it is weak about their generalization ability in the real application. Some groups analyze the stairs climbing ability based on the geometry and kinetic features of the robot (Liu, J., Wang, Y., Ma, S., Li, B., 2005) (Liu, Y., Liu, G., 2009). Hence, some outside geometry and kinetic features are not the only constrains that influence the stairs climbing ability, in most situations, the position of centroid play much more decisive role in the performance rather than the others. The group of Kim analyzed the walking balance of a leg robot based on centroid (Kim, B. H., 2009). Because of the importance of centroid position, the groups of Zhu and Wang research on the centroid adjustment methods to increase the traveling ability (Zhu, X. L., Wang, H. G., Fang, L. J., Zhao, M. Y., Wang, L.D., 2006) (Wang, W., Kong, M., Du, Z., Sun, L., 2009), but the result of their research also does not give the relationship between stairs climbing ability and centroid position.
In this paper, we take the track mobile robot with front flipper for example, just because this type of robot has the simple mechanical structure and it is well and widely used in the design and implement of search and rescue robot. The robot is abstracted as a mass point-plane model. The process of climbing one stair is analyzed to build up the mathematic description for the maximal height the robot could climb over based on the centroid position of the robot. And we give a precise and computable solution of this problem. It could be a basis for centroid adjustment to increase the climbing height. When the robot is running along the nose line of the stairs after climbing the first stair, the stability problem is how much of the angle the forward direction of the robot deviating from the nose line will make the robot overturn back from the side of the robot body. The computable value of this angle influenced by the centroid position is discussed. All the works of this paper are to quantitatively present the centroid position how to influence the stairs climbing ability and stability.
The rest of this paper is organized as follows: In section 2, we introduce the search and rescue robot and the robot model is abstracted. In section 3, we calculate the relationship between the height that the robot could overcome and the centroid position. In section 4, the stability during the stairs climbing is analyzed, based on the centroid projection method. Section 5 presents our experiment results, and section 6 concludes the paper and suggests future works.
Robot Model
The track mobile robot with front flipper is the widely used structure for the search and rescue robot for its good traveling ability and reliability. In this paper, we take this type robot, shown in Fig.1, for example, which is designed by ourselves (Guo, Y., Bao, J., Song, A., 2009).

The picture of one type search and rescue robot
This robot has a basic vehicle body and different kind equipment located on it. The vehicle body and the equipment have independence coordinated systems such as vehicle body coordinated system OXYZ and equipment coordinated systems OiXiYiZi which are shown in Fig.2. So the centroid position is actually related to individual coordinated system. The vehicle body coordinated system is selected as the main coordinated system which all the centroid positions in equipment coordinated systems should transform to. The centroid position of the whole robot system should be built up in this main coordinated system.


The structure of robot system
In equation (1), M is the mass of the vehicle body, c is the centroid position of the vehicle. m
i
is the mass of ith equipment device,
The robot system is abstracted as a mass point – plane model with the mass point P
Centroid
that has all the mass of the system and the vehicle body plane with no mass but all of the geometric constraints. Shown in Fig.3,

The mass point-plane model
In general opinion, the height of the stair that the robot could overcome is decided by the power of the robot, in another word, it means that much more power of the system could drive the robot to cover the higher stair. It is right, but not all the time, because the centroid position also plays much more important role to decide the maximal height of covering stair.
When the robot is climbing one stair, shown in Fig.4, the distance between the mass point and the plane is h, and the distance between the mass point and the tail of robot is l. Selecting any point S with distance l
x
, D is the distance between the touch point N and the projection of point S on the stair plane, and D is related to θ and l
x
.


The picture of climbing one stair
During the mass point-plane mode moving to climb the stair, the touch point N moves to O along the plane, and the angle θ increases. Based on curves shown in the Fig.4, when l
x
< H/sinφ, D(φ, l
x
) has the maximum, and when l
x
> H/sinφ, D(φ, l
x
) has the minimum. When
D(φ, l
x
) is extremum. So

The critical angle φ'(l
x
), which is between the plane of mode and the ground when D(φ, l
x
) is extremum, is
The mass point P
Centroid
(d, l, h) has the same kinetic feature with its projection P', the critical angle φ'
c
is
At this time, the trend of moving to the right is zero for the mass point P
Centroid
(d, l, h). It also could be understood as that the projection of the mass point P
Centroid
(d, l, h) on the water plane would never move to the right but move to the left with the angle φ going on increasing. At this time, the gravity line of the mass point must have moved over the touch point N or the gravity line travels across the touch point N (w = 0), otherwise, the mass point - plane mode will overturn back and fail to climb the stair. So at the critical condition,

From the equation (6), we know that
Considering the equation (7) and (8),


The equation (10) is the important result of the relationship between the maximal height the robot could climb over and the centroid position. If the centroid position is given before the robot working we could calculate that what height the stair or obstacle with could be climbed over. And before the robot starting to climb a stair, the height should be measured and recognized to contrast with the maximal height. If the maximal height is larger than that measured, it could safely work, otherwise, the robot must terminate the process. It is very meaningful for the safe and successful working of the search and rescue robot. On the other side, when we understand the maximal height the robot could deal with, we must adjust the centroid position based on the result in equation (10) in advance.
The figure, shown in Fig.5, gives a visual description for the equation (10). We could find that the influence of l is nearly linear with the fixed h, but the tiny increase of h will lead to the steep decrease of maximal height. So for the height the robot could climb, h is much more sensitive than l, and the best way of enhancing the performance of climbing height is decreasing the h rather than increasing the l.
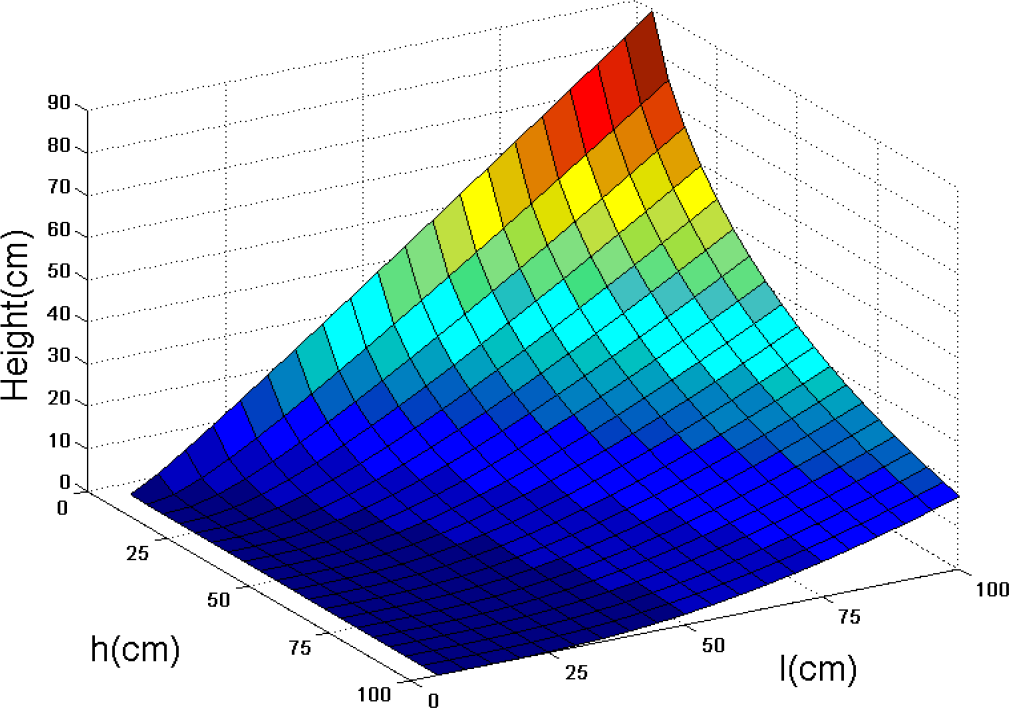
The climbing height based on centroid position
From the above mentioned discussion, the problem of turnover back around the button side of the robot through finding the maximal height robot could cover to avoid climbing the stair higher than that one. When the robot has caught the first stair and goes on running along the nose line of stairs, the problem of the robot is protecting the robot turnover back around one side of its body because of the flip between each track and the stairs.
The gravity line projection method is used as the judgment of the stability and the method is to analyze whether the projection of the mass point P Centroid is in the projection region of the vehicle body plane on the water level plane. When the projection of P Centroid is in the projection region of the vehicle body plane, the robot is with the stability. The position of projection of P Centroid in the projection region of the vehicle body plane is moving with the change of the φ between nose line plane and water level plane and the θ that between the direction and the nose line. So the problem is transferred to how much of the angle θ the forward direction of the robot deviating from the nose line will make the robot turnover back from the side of the robot body under the fixed angle φ.
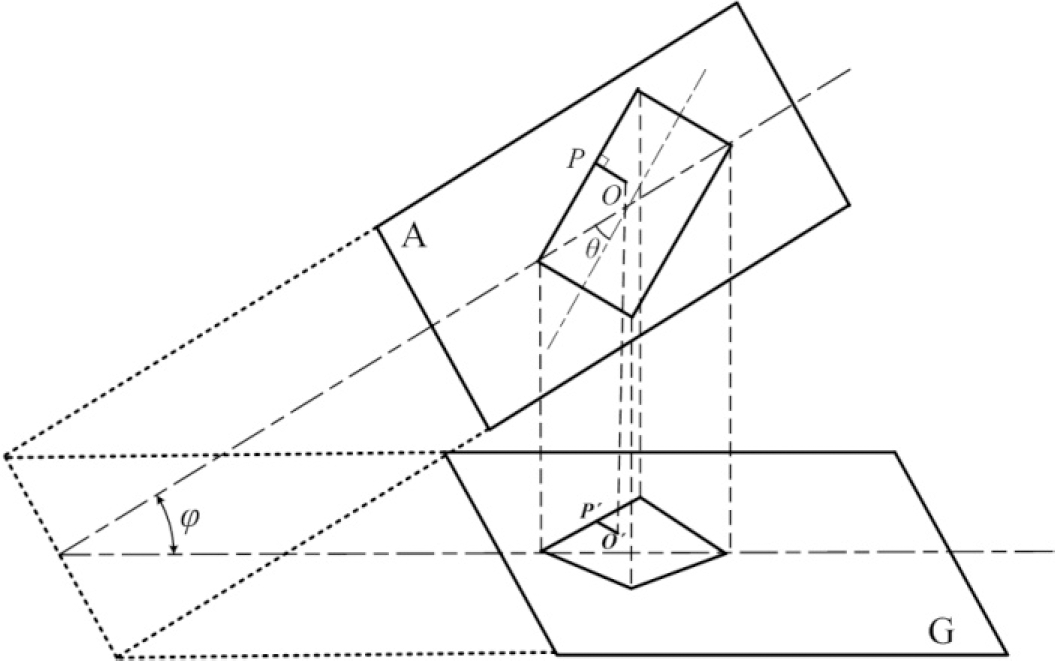
Shown in Fig.6, l
G
is the projection of the distance from the mass point to the nose line plane A, and point O is the projection of P
Centroid
on plane A, and


The projection of centroid on plane A
The distance between projection of P
Centroid
and the near side line of the vehicle body plane on the water level plane is adopted to describe the stability level of the system. If the distance equal to zero, that means the critical stability. Shown in Fig.7, OP is the distance between point O and near side of the vehicle body plane,


The parameters on plane A
The right angle between OP and the side could be divided into two angles θ1 = θ and



The projection from plane A to plane G
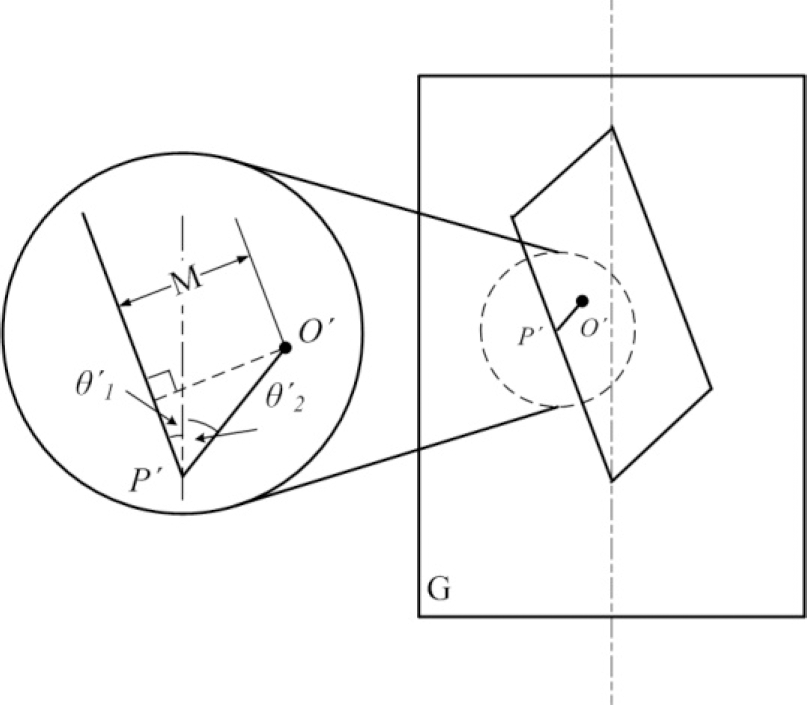
The parameters on plane G
And O'P' is the projection of OP and it equals to

So the distance between the projection of P
Centroid
and the near side line of the vehicle body plane on the water level plane is M, and

Because of the angle summation formula,

We defined the two parts in equation (18) as bellows,


The curves of f2(θ, φ) are shown in Fig.10, and the curves demonstrate that f2(θ, φ) > 0 except

The curves of f2(θ, φ)
Because the result of function f2(θ, φ) is just concern to the basically zoom of scale, so we call it the scale function of the equation (18).
Observing the function f1(h,d,θ,φ), it domains whether the value of equation (18) could reach to zero, so it is called the basis function of equation (18) . The θmax which makes the basis function equal to zero is the critical constraint and that also means the maximal stability-keeping angle.
Because of f1(h,d,θ,φ) ⩾ 0,

Considering the equation (21), the angle φ' equal to arctan

The figure of φ' with D=40cm
And from the Fig.11, we could know that the tiny increase of h is much more sensitive on the decrease of φ' than that of d. So if we want to enhance the stability during the stairs climbing the d should be decreased as much as possible.
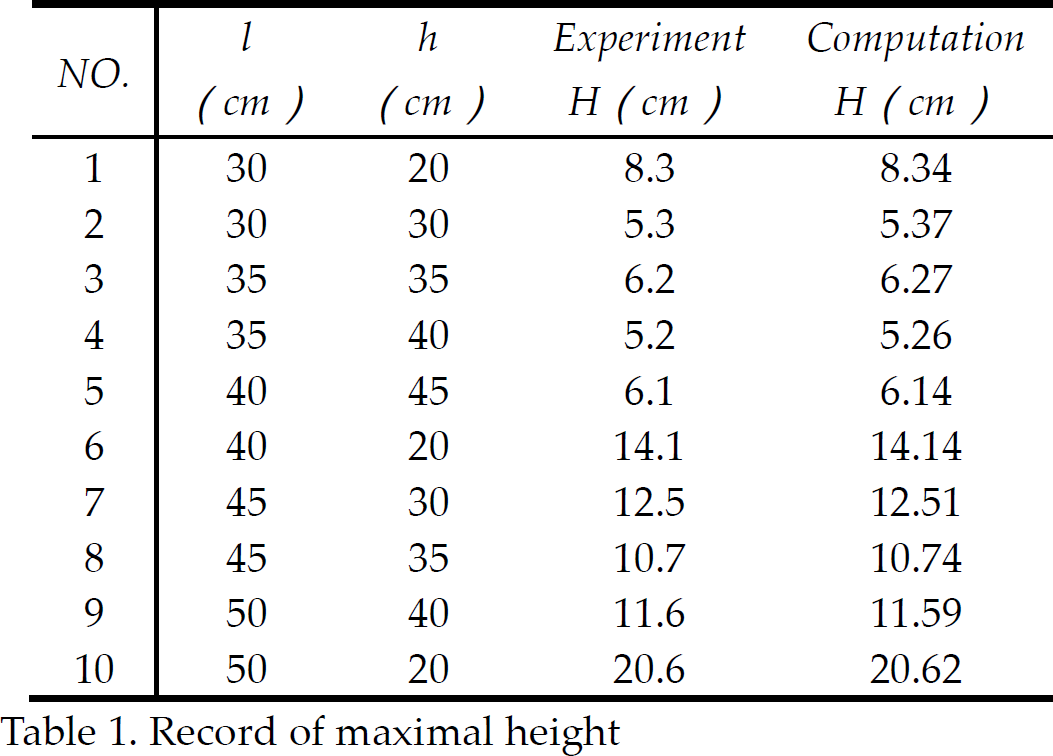
We used the search and rescue robot ourselves designed (Guo, Y., Bao, J., Song, A., 2009) to make a proof of the method. The different devices are separately loaded on the robot to receive the different centroid positions. And we adjusted the height of stair and drove the robot climbing it, shown in Fig. 12. The maximal height is recorded in Table 1.

The experiment of maximal height could climb
Record of maximal height
With the different centroid position, the robot is requested running on the stairs shown in Fig. 13 with φ = 30°, 45°, 60°. And the results of θmax are recorded in Table 2, Table 3 and Table 4.

The experiment of θmax
Record of θmax, φ = 30°

Record of θmax, φ = 45°

Record of θmax, φ = 60°
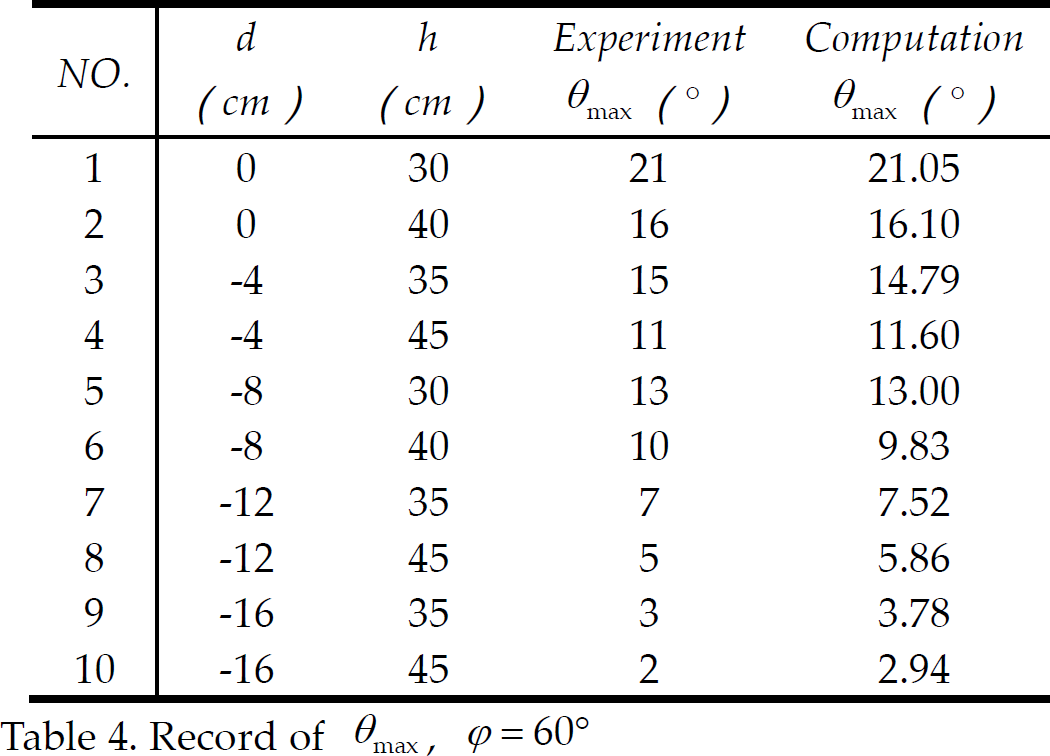
From all the tables, the contrasts between the experiment results and the computed results are almost equal. And we have enough reasons to believe that the analysis and compute method of the maximal height the robot could climb over and the maximal stability-keeping angle θmax are justifiable and correct.
In this paper, we are trying to find out the relationship between the stability of stairs climbing and the centroid position of the search and rescue. Considering the work situation of the search and rescue robot, the system is abstracted as a mass point – plane model. We analyze and calculate the process of climbing one stair, and the relationship between the maximal height the robot could climb over and the centroid position is developed through making the robot never turnover back around the bottom side. The mathematic description is given in this paper. And we also give an analysis of the stability during the stairs climbing. In order to protect the robot not to turnover back around one side of its body, we are trying to find and calculate the maximal stability-keeping angle deviating from the nose line when the robot could keep its stability. And a precise and computable solution of this problem is given in the paper. The experiment using the real search and rescue robot demonstrates its justification and correction.
All the result of research is based on the physical features of the search and rescue robot, and it hopes to find another way instead of adding more electric devices to enhance the performance of the robot. Our purpose is exploring the potential ability of the robot mechanical structure and keeps the control and electric systems concise and trustworthy. In future, we should do the job of decreasing the weight of the control and electric systems based on physical optimization such as centroid position and others like that.
Footnotes
7. Acknowledge
This research is made possible with support from the Project under Science Innovation Program of Chinese Education Ministry (No.708045).