
Abstract
As an autonomic and convenient assistance device for people with disabilities and the elderly climbing up and down stairs, electric-powered wheelchairs with stair-climbing ability have attracted great attention in the past two decades and some various electric-powered wheelchairs with stair-climbing were developed. By using the developed electric-powered wheelchairs with stair-climbing, many patients with walking difficulties are able to descend the stairs conveniently to participate in outdoor activities, which are beneficial to both their physical rehabilitation and mental health. In this article, a review of electric-powered wheelchair with stair-climbing current technology is given and its future tendency is discussed to inform electric-powered wheelchair with stair-climbing researchers in the development of more applicable and popular products. Firstly, the development history is reviewed and electric-powered wheelchairs with stair-climbing are classified based on an analysis of their stair-climbing mechanisms. The respective advantages and disadvantages of different types of electric-powered wheelchairs with stair-climbing are outlined for an overall comparison of the control method, cost of mechanical manufacture, energy consumption, and adaption to different stairs. Insights into the future direction of stability during stair-climbing are discussed as it is an important aspect common to all electric-powered wheelchairs with stair-climbing. Finally, a summary of electric-powered wheelchairs with stair-climbing discussed in this article is provided. As a special review to the electric-powered wheelchairs with stair-climbing, it can provide a comprehensive understanding of the current technology about electric-powered wheelchairs with stair-climbing and serve as a reference for the development of new electric-powered wheelchairs with stair-climbing.
Introduction
As an important mobility assistance device for aged and physically disabled people, electric-powered wheelchairs (EPWs) have been widely used for many years. Nowadays, many patients and users utilize EPWs as their primary means of mobility during indoor and outdoor daily activities. 1,2 However, it is still a challenging task for a standard EPW to overcome the existing environmental barriers such as the building or civil infrastructure stairs. 3 Especially for some patients living in a building without an elevator, it is difficult for them to travel up and down the stairs using a standard EPW. This results in patients staying indoors for prolonged period of time, which is not conducive to their mental health and physical rehabilitation. In this case, the development of an electric wheelchair that allows them to travel up and down stairs is very helpful to expand their scope of activities and improve their quality of life. As a result, the development of an electric-powered wheelchair with stair-climbing (EPW-SC) ability is highly necessary for many patients and elderly people with walking dysfunction and has already attracted great attention in the past several decades.
In general, staircases have many continuous steps on a slope with a large angle, which presents a challenge for an EPW with a rider to ascend or descend the stairs. Compared with the common EPWs, EPW-SCs will require larger driving forces, better maneuverability, and stronger obstacle crossing ability. 3,4 In addition, prevention of potential tip over and ensuring the rider’s safety during stair-climbing are also necessary for EPW-SCs. 4,5 The affordability and convenience of use is important for the EPW-SCs to be widely adopted by users. In summary, the four characteristics of an ideal EPW-SC are a suitable stair-climbing mechanism maintaining low cost and lightweight, 6 a smart motion control system with high stability, a reliable tip over preventing strategy, and a convenient operation interface.
Since the 1990s, many research results on EPW-SC have been achieved and a variety of EPW-SC prototypes have been developed. 7 –12 In the past two decades, several types of commercial EPW-SCs were deployed to the market, including the iBOT series, 13,14 TGR series, 15,16 and TopChair series. 17,18 Although all of these prototypes and commercial EPW-SCs have stair-climbing abilities, few are able to meet the four characteristics of an ideal EPW-SC and satisfy user requirements. For example, the most popular EPW-SC product iBOT sold by Independence Technology, L.L.C., has a high price and requires additional care in ascending and descending stairs. 19 Likewise, the latest EPW-SC prototype with a wheel-leg combined mechanism for stair-climbing developed by Chang-Hyuk Lee has not achieved the low cost and lightweight requirements. 12 So far, new EPW-SC technologies and prototypes are still in the research stage for many investigators and companies.
The primary purpose of the current article is to review current EPW-SC technologies and provide an outlook for their future development. The section “Development history and classification of EPW-SCs” reviews the development history of EPW-SCs and provides a classification of devices based on their various stair-climbing mechanisms. The section “Analysis and comparison of different types of EPW-SCs” provides an overall comparison of these different types of EPW-SCs and analyzes the current technologies of EPW-SCs. In the section “Stability analysis of EPW-SC in climbing the stairs,” stair-climbing stability is discussed as it is an important common requirement. In the section “Development trend of EPW-SC,” insights into the future direction of EPW-SCs are provided. The conclusions to this article are presented in the section “Summary.”
Development history and classification of EPW-SCs
In the development of EPW-SCs, it is crucial to design a suitable stair-climbing mechanism.
The stair-climbing mechanism design will directly affect the cost, stability, control
complexity, and energy consumption of EPW-SCs. Therefore, an in-depth analysis of
stair-climbing mechanisms is provided for EPW-SC prototypes and commercial products. The
mechanisms are classified into four categories: track-based, wheel cluster–based, leg-based,
and hybrid stair-climbing mechanisms. Track-based stair-climbing mechanism: The outer teeth of the track press heavily on
the sharp corner of a step while the motors driving the track wheel cause it to rotate
along the inner surface of the track. The track-based stair-climbing mechanism enables
the EPW-SC to climb up or down the stairs. Wheel cluster–based stair-climbing mechanism: A wheel cluster is a component with
multiple wheels uniformly distributed in the same plane around a common center. Wheel
clusters typically have two to four wheels, as shown in Figure 1. While using a stair-climbing mechanism,
the wheels rotate around the central axis of the wheel cluster and propel the EPW-SC
up or down the stairs. Leg-based stair-climbing mechanism: This type of stair-climbing mechanism originates
from the imitation of humans’ and animals’ stair-climbing techniques, using legs and
feet to walk on various steps facilitating efficient and stable stair-climbing. Hybrid stair-climbing mechanism: This type of stair-climbing mechanism uses a
combination of a special deformation mechanism and a wheeled mobile mechanism and is
defined in this article as a hybrid stair-climbing mechanism. It has an innovative and
more complex mechanical structure and control method.

Based on the understanding and analysis of working principles and characteristics, EPW-SCs developed in the past two decades and their stair-climbing mechanisms are listed in Table 1. This enables further study of the occurrence of different stair-climbing mechanisms and observation of their developmental trends.
The developed EPW-SCs and their classification.
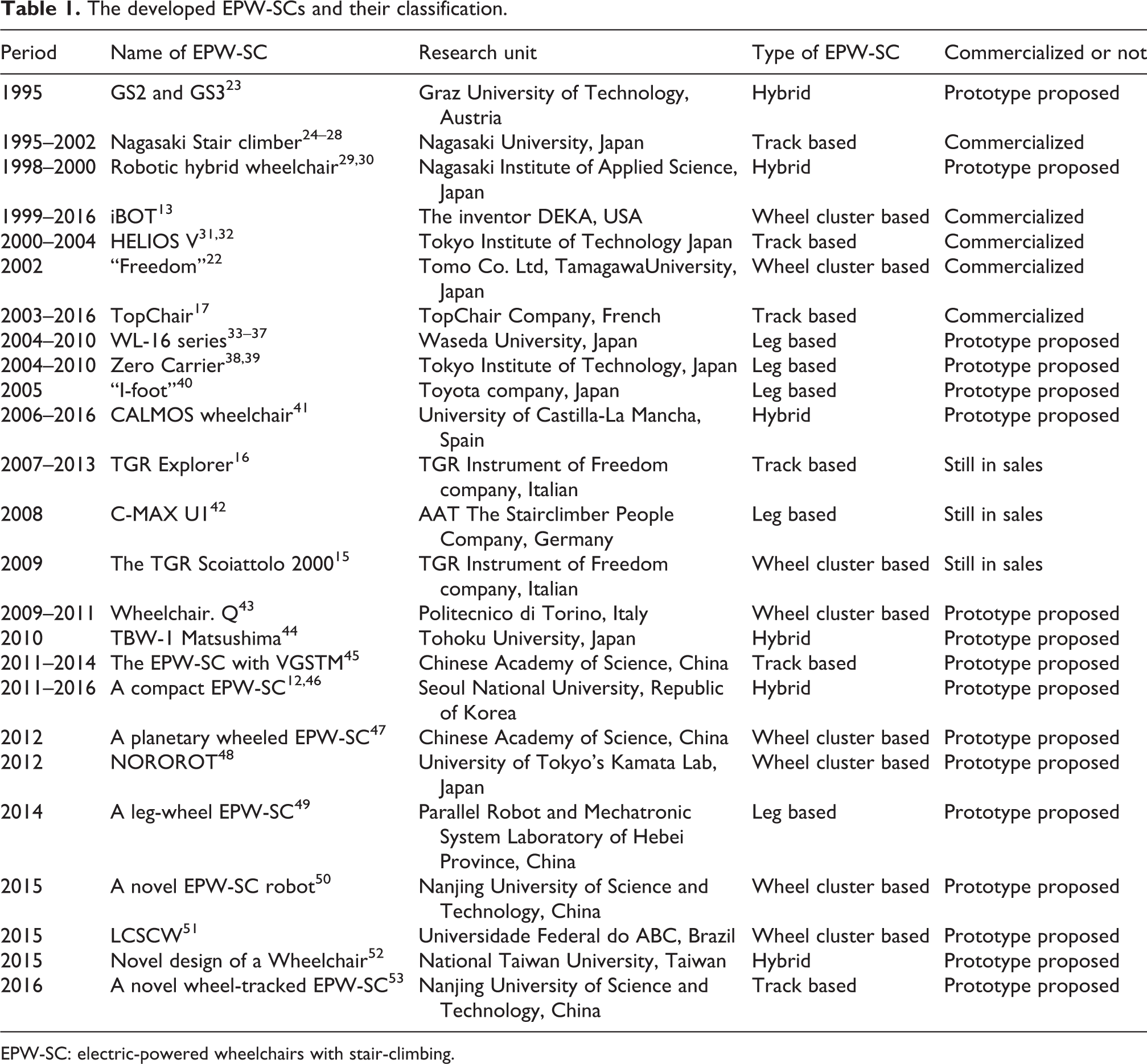
EPW-SC: electric-powered wheelchairs with stair-climbing.
According to Table 1, we can see that track-based EPW-SCs have attracted the most attention from researchers since the 1990s, followed by the wheel cluster–based EPW-SCs with a variety of prototypes and several commercialized products. Leg-based EPW-SCs had less prototypes and commercialized products, and hybrid EPW-SCs are the least studied. It can also be seen that the track-based EPW-SCs were developed the earliest and in the last two decades have been the main concern of researchers. Concern from researchers and product application of the leg-based EPW-SCs and hybrid EPW-SCs are substantially lower than the other two types of EPW-SCs. Considering that the development of these four categories of wheelchairs should have a direct relationship with their respective performance and characteristics, in the next section, the current technology of each category will be analyzed and compared to provide reference for researchers regarding selection of EPW-SC design.
Analysis and comparison of different types of EPW-SCs
The control system and operation mode of EPW-SCs is decided according to their stair-climbing structure. The classification framework described in the section “Development history and classification of EPW-SCs” will be used to summarize the main technologies of stair-climbing wheelchairs. Aspects of mechanical structure, control system and method, energy consumption, and operation convenience will be compared to provide a reference for the future development of EPW-SCs.
Track-based EPW-SC
Due to the interlocking effect between the track’s outer teeth and the steps’ sharp corner, the track-based stair-climbing mechanism enables the EPW-SC to climb up or down the stairs at a constant speed in a stable manner. As a result, the track-based stair-climbing wheelchair is the most widely applied of the four types of EPW-SCs.
The first successful and popular application of a track-based stair-climbing mechanism in an EPW-SC was the Nagasaki stair climber series developed in Japan. 24 –28 They performed experiments and optimization work on a prototype and achieved commercialization of the EPW-SC products. Their products include different models with the option of a single section track or dual section track, as shown in Figures 2 and 3. Hirose et al. of the Tokyo Institute of Technology in Japan also developed a track-based EPW-SC named Helios < in 2000. 31,32 Their successful work laid a lasting foundation for the development of additional EPS-SC technologies. Yu et al. designed a new wheelchair robot with a variable geometry single-tracked mechanism, which can easily adapt to the transition between the stairs and the top flat platform as shown in Figure 2. 45 In addition to its complicated mechanism design, the crawler easily slips due to the change in track tension during stair ascent. Tao et al. developed a track-based EPW-SC, which facilitates the transition between the stair-climbing mode and the wheel mobile mode on flat ground, as shown in Figure 4. 53

Track-based EPW-SC. (a) EPW-SC Sunwa named CDM-2. (b) The Nagasaki EPW-SC named KSC-A-11. EPW-SC: electric-powered wheelchairs with stair-climbing.

The variable geometry single-tracked EPW-SC. EPW-SC: electric-powered wheelchairs with stair-climbing.

Track-based EPW-SC prototype designed by Tao et al. EPW-SC: electric-powered wheelchairs with stair-climbing.
Several companies have released a number of EPW-SC products with a track-based stair-climbing mechanism and an integrated wheeled mobile mechanism. This type of wheelchair incorporates both functions of stair-climbing and moving on level ground. Among them, the most successfully commercialized products are TopChair-S 18 and TGR Explorer, 54 as shown in Figures 5 and 6, respectively. These products have good performance for riding comfort, maneuverability, and stair-climbing. However, their slightly more complicated structure and higher price partially hinder a more extensive application among the elderly population and persons with disabilities.

TopChair-S EPW-SC. (a) The TopChair-S provides multiple options for users. (b) The TopChair-S collapses for ease of storage or travel. EPW-SC: electric-powered wheelchairs with stair-climbing.

EPW-SC named TGR Explorer. EPW-SC: electric-powered wheelchairs with stair-climbing.
The control system of a track-based EPW-SC is mainly used for motion control, automatic seat leveling, and command receiving from the operation interface, which aims at ensuring the EPW-SC ascends and descends stairs safely. As the TopChair-S is a widely used track-based EPW-SC, its specifications and control system structure will be described as a typical example, 18 as shown in Table 2 and Figure 7.
The specifications of TopChair-S.


The control system structure of TopChair-S.
Based on the control structure, an adaptive control method is also necessary to ensure the EPW-SC can climb up and down the stairs in a stable and smooth manner. For the track-based EPW-SC, the Proportion Integration Derivation (PID) control algorithm is sufficient for controlling the speed of its driven wheels and rotation angle of the seat, as applied in the TopChair-S. 3 In addition, an active optimal control for track-based EPW-SCs with non-holonomic system was designed by Wang et al. to obtain the expected reference of constraint forces and verification through the simulation. 55 In addition, a few researchers have considered stair recognition technology and gravity center adjustment methods, which are beneficial to the EPW-SC’s stability in stair-climbing. For example, Häcker et al. developed a stair-sensing system for EPW-SCs based on optical three-dimensional (3-D) data. 56 Through the appropriate algorithm, it can automatically identify and locate stairs made from different materials. This result shows an immense step forward for autonomous and assisted mobility of EPW-SCs.
In terms of its motion characteristics, the track-based EPW-SC can climb up or down the stairs at a constant speed in a stable manner due to the interlocking effect between the track’s outer teeth and the steps’ sharp corner. On the other hand, the deformation and lower transmission efficiency from the track drive results in high-energy consumption during stair-climbing.
Wheel cluster–based EPW-SC
The wheel cluster–based stair-climbing mechanism is relatively compact and can easily switch to wheeled mobile mode when running on level ground. This results in the wheel cluster–based EPW-SC having a relatively simple structure and low cost.
The wheel cluster–based mechanisms for stair-climbing can be subdivided into two categories: single cluster 13,15 (Figure 8) and the dual cluster 22,54 (Figure 9). For example, the TGR Scoiattolo 2000 has a single wheel cluster mechanism with three wheels and two additional omnidirectional wheels in the front. 15 Also, there are similar mechanisms such as an economic EPW-SC 47 and iBOT 4000. 57 A dual wheel cluster–based stair-climbing mechanism with two wheels on each wheel cluster is used in the “Freedom” series EPW-SC 22 and a low-cost EPW-SC prototype named “LCSCWC”. 51 Generally, compared with the single wheel cluster–based EPW-SC, the dual wheel cluster–based mechanism can reduce the speed fluctuation and improve both stability and safety. However, it also has a larger size and more complex control method.

Single wheel cluster–based EPW-SCs. (a) iBOT. (b) TGR Scoiattolo 2000. EPW-SC: electric-powered wheelchairs with stair-climbing.

Dual wheel cluster–based EPW-SC. (a) EPW-SC named Freedom. (b) EPW-SC named LCSCWC. EPW-SC: electric-powered wheelchairs with stair-climbing.
The control system structure of a wheel cluster–based EPW-SC is similar to that of a track-based EPW-SC. To obtain this control system structure, the track drive seen in Figure 6 is changed to a wheel cluster drive. Despite different types of EPW-SCs having certain similarities in function, their control methods or strategy in stair-climbing may be very different. Shino et al. developed the drive motors’ control method by designing a wheel cluster mechanism equivalent to an inverted pendulum and proposing an integrated control system based on a linear–quadratic regulator. This consisted of a gravity-center and a wheel-linkage control stage, which was applied in stair-climbing successfully. 10 Several fuzzy-based control structures and methods were developed by Ghani et al. to control a wheel cluster–based EPW-SC similar to the iBOT for stair climbing, with controls verified through simulations. 58 –63
In addition, since the wheel cluster–based EPW-SC climbs one step at a time, the movement speed is constantly fluctuating, which results in the rider feeling uncomfortable. The complexity of its control is significantly higher than that of the track-based EPW-SC. However, its energy consumption and mechanical structure cost are also considerably less than that of the track-based EPW-SC.
Leg-based EPW-SC
Leg-based EPW-SCs have adopted several kinds of leg-based stair-climbing mechanisms, including biped 64 and multiped stair-climbing mechanisms, 65 as shown in Figure 10. For example, a biped stair-climbing mechanism based on the parallel mechanism was adopted in the WL-16 series locomotors. 33 –37,64,66 Likewise, a biped stair-climbing mechanism based on the human-like legs and feet mechanism consisting of three to four rotary joints is applied in a stair-climbing device named “I-foot.” 40 In addition, a stair-climbing vehicle named “Zero Carrier” with eight legs was proposed by Yuan et al. and a corresponding experimental prototype was developed. 67 Wang et al. also proposed a concept of an eight-legged wheelchair 49 aiming at improving the limitations of the Zero Carrier design.

Leg-based EPW-SCs. (a) WL-16 II. (b) I-foot. (c) Zero Carrier. EPW-SC: electric-powered wheelchairs with stair-climbing.
Due to the complex structure of the leg-based EPW-SCs and the number of required control motors, its stair-climbing trajectory needs to be combined with the planned walking trajectory. For the WL-16 series, an improved control method for model-based dynamic walking of the bipedal humanoid was studied from 1996. The virtual compliance control method was used to moderate its landing impact, which resulted in successful stair-climbing with human carrying.
This type of stair-climbing device is essentially a biped robot with human carrying function. Its control method is similar to the general biped robot, which is mainly based on zero moment point (ZMP) analysis and feedback control to achieve stable walking and stair-climbing. 33 –37 Yuan et al. designed an EPW-SC called Zero Carrier that controls its eight legs and feet to locate at the right step in sequence, ensuring the stability of stair ascent and descent. 68,69 Due to the large number of legs, the design can easily have decreased efficiency during stair-climbing and difficulty in adapting to different stair types.
Although these leg-based stair-climbing vehicles are complex, have high costs, and have unconventional appearances, they are able to achieve the core function of stair ascent and descent and provide some innovations for EPW-SC design.
Hybrid EPW-SC
The hybrid EPW-SC can adapt to the stairs and perform stair-climbing through the combination of a unique transmission mechanism and a wheeled-type mobile mechanism. The number of hybrid stair-climbing mechanisms is relatively less than the three previously described mechanism types due to its complexity. The hybrid EPW-SC named “TBW-1” is composed of two four-bar linkage mechanisms with a wheel at every vertex, 44 as shown in Figure 11. Through the four-bar linkage mechanisms’ locomotion, the wheels’ positions can be adjusted to maintain a suitable contact state with the steps, therefore allowing it to climb up and down stairs. Another hybrid EPW-SC designed by Morales et al. in 2007 utilizes two four-bar linkages consisting of two linear actuators, a series of connecting rods, and two driving wheels to accomplish positioning and climbing on the stairs separately, 41 as shown in Figure 12.

TBW-1 with two four-bar linkage mechanisms.

The EPW-SC while climbing on the stairs. EPW-SC: electric-powered wheelchairs with stair-climbing.
Morales et al. studied hybrid EPW-SC stair adaptive control, obstacle surpassing, and posture control and proposed the stability control method based on the kinematic model and climbing strategies. 70 These were further incorporated with the dynamic model into the feedback control. A control system based on the Stair-Climbing Mobility Systems (SCMS) transition diagram and a linear Proportion Derivation (PD) action with a nonlinear compensation of gravitational terms was then proposed to accomplish the dynamic control for stair-climbing. 71 –73 These control methods were mainly designed to let the stair-climbing mechanism accurately reach the appropriate stair, and, therefore, they can only be applied in this hybrid EPW-SC. Although these hybrid EPW-SCs have been greatly innovative, they have larger sizes and greater difficulty in stair-climbing stability compared with other EPW-SCs.
Comparison of various types of EPW-SCs
Each stair-climbing mechanism has its own characteristics and advantages. From a practical point of view, the track-based and wheel cluster–based mechanisms are widely accepted by the users in terms of cost, size, and stability. However, a novel stair-climbing mechanism still needs to be developed, and currently some researchers and companies have started to focus on new methods of control, stability, and human–computer interface technology. The detailed performance comparison is shown in Table 3.
The detailed performance comparison of four types of EPW-SC.

EPW-SC: electric-powered wheelchairs with stair-climbing.
As can be seen from Table 3, the track-based and wheel cluster–based EPW-SCs in general have better overall performance. Comparing these two types of EPW-SCs, the track-based EPW-SCs have simpler control systems and better adaptability to different stairs, while the wheel cluster–based EPW-SCs have advantages in cost and energy consumption.
Stability analysis of EPW-SC in climbing the stairs
Preventing the wheelchair from tipping over is a crucial step in maintaining stability during stair climbing. There are three main aspects to solve this stability problem including design of the tip over prevention mechanism, control strategies for preventing tip over, and center of gravity (COG) adjustment and stability evaluation.
Design of the tip over prevention mechanism
The stair-climbing mechanism allows the EPW-SC to climb up and down stairs; however, it must also prevent it from tipping over. Especially during the initiation of stair ascent and descent, it is easy for the EPW-SC to tip over due to the sharp change in attitude. Thus, in addition to lowering the COG of the EPW-SC and its rider, implementation of auxiliary support mechanisms for tip over prevention is necessary. An EPW-SC named C-MAX U1was designed with a stable support at the front portion of the stair-climbing mechanism to prevent tip over. 42 Yokota et al. presented a caster-fixed design with a new type of assistive plate to prevent tipping from the stairs. 74 The TGR Explorer also has two feet-like members at the front and back of the stair-climbing mechanism that act as an assistive support to improve the stability between the platform and stairs’ transition, 54 as shown in Figure 13.

Two feet-like assistive mechanism of TGR Explorer.
For the dual- or multitrack-based stair-climbing mechanism, one of the tracks can perform an auxiliary role similar to the TGR’s four feet-like mechanism 28,45 by controlling the attitude angle between different steps. Some corresponding auxiliary mechanisms are also designed in the wheel cluster–based stair-climbing mechanism to prevent its tip over. 21,75 In fact, the method for designing a set of reliable and effective auxiliary support institutions is an important problem that needs to be solved in the development of track-based or wheel cluster–based EPW-SCs.
Control strategies for preventing tip over
For some leg-based and hybrid EPW-SCs, preventing tip over is mainly achieved by control strategies aiming the feet’s locomotion. For example, the EPW-SC called Zero Carrier controls its eight legs and feet to move the feet and ensure stability. 65,67,68 Some biped EPW-SCs are mainly controlled by ZMP to achieve stability on stairs and prevent tipping in any direction, such as the WL-16 series. 33 –37,64,66 Sugahara et al. also developed a hybrid EPW-SC named “TBW-1” with a controlling mechanism that deforms step by step to achieve stability during the stair-climbing action. 76 The TopChair with integrated crawler and wheel mobile modes also implemented a smooth transition during stair climbing between the top platform and the stairs. This was done through control of the wheels’ height to adjust and change the attitude of the track-based stair-climbing mechanism. 77
COG adjustment and stability evaluation
In the process of climbing up and down stairs, the COG locomotion of the EPW-SC with a rider and the related overturning moment are the main factors in determining whether or not the EPW-SC is going to tip over. The automatic adjustment of seat posture is also a dynamic position adjustment to the rider’s COG. Therefore, it is necessary to give sufficient consideration to the possible COG positions of the EPW-SC and rider in the stair-climbing mechanism design and seat position determination. The iBOT series EPW-SCs performed the feedback control to its COG position similar to the inverted pendulum control and laid a foundation of stable stair-climbing. 20,78
In the aspect of stability analysis and evaluation, Fang et al. analyzed the stair-climbing stability of their wheel cluster–based EPW-SC and gave a simulation verification based on the usage of stability margin and the position analysis of the COG’s projection point in the support polygon. 4 Yu et al. proposed a tip over and slippage stability criterion for a variable geometry single-tracked EPW-SC based on the geometric model, the static model, and the track–stair interaction analysis, for partial tracked-based EPW-SCs. 5,79
Once tip over has occurred during the process of stair climbing, it can be very dangerous and cause personal injury to the rider. Therefore, analysis on stair-climbing stability is very important. From reviewing existing stair-climbing stability and related results, it was deemed necessary to further study prediction and assessment methods on stability and to provide the auxiliary safety protection before stability problems occur.
Development trend of EPW-SC
Due to the low cost and high spatial efficiency of staircases when connecting areas of differing vertical elevations, the presence of stairs will most likely be a reality in our society for the next several decades. EPW-SCs designed for the elderly and persons with disabilities still need improvements to meet the wider range of demands for future use. After the review of the existing EPW-SC technology and common EPWs, the current situation and trend of EPW-SCs will be discussed.
Low cost, lightweight, and high adaptability of EPW-SC
The existing EPW-SC products can meet the basic functional demands of the users, but there is a need to lower the cost and the weight for affordability. The complexity and cost of an EPW-SC is often determined by its mechanical structure. Therefore, it is necessary that related innovative design and optimization is performed on stair-climbing mechanism. Moreover, better adaption to various sizes of stairs should be considered by the EPW developer. Once these improvements are obtained, the EPW-SC will be more widely favored and attract broader interest.
Stair-climbing stability evaluation and prediction
In order to prevent tip over of EPW-SCs in stair-climbing, it is necessary for the researchers to provide some safety precautions through mechanism design and control strategy. On the other hand, the EPW-SCs also need to combine the latest sensor technology and stability evaluation methods to perform real-time analysis and detection on stair-climbing stability. This can be used to predict possible tip over and immediately trigger the protection mechanism. There are few studies in which an evaluation method of the EPW-SC’s stability in stair-climbing was proposed 53 or the real-time monitoring of the EPW-SC’s stability and feedback to the motion control was applied. 3,12 A fuzzy model-based gravity center adjustment and inclination control method for EPW-SCs was proposed and verified by simulation and experiments by Wang et al. This method can efficiently compensate for the changing of the gravity center to prevent the EPW-SC’s tip over. 80 From the intelligence and security of EPW-SCs, a main development trend of stair-climbing stability is the automatic evaluation, prediction, and adjustment methods of stair-climbing stability.
Control system and intelligent control algorithms
For the EPW-SC, the adopted control system is determined according to its stair-climbing mechanism. The control system of various types of EPW-SCs may be largely different, but their main purpose in ensuring the stability and safety of stair-climbing is common. As a result, the control systems embedded stability evaluation, prediction, and adjustment should be the future development trend.
In addition, the development of the autonomous navigation technology, self-positioning algorithm, and intelligent control algorithm in the field of robotics are likely applied to EPW-SCs. To many elderly persons and persons with disabilities, future EPW-SCs will not only be a tool to aid in stair-climbing, but could also be developed as an intelligent system providing entertainment, communication, and other service functions.
Operation mode and human–machine interface technology
The rocker operation mode was adopted in most of the existing EPW-SCs, by which the user can realize the control to the EPW-SC based on a correct rocker operation. A new type of EPW-SC has been equipped with a wheelchair status display, which can facilitate use and improve the correction and safety in their rocker operation. Because some users of EPW-SCs are not able to use the operating handle, user-friendly human–machine technologies, such as brain machine interfaces, 81 language interfaces, and other intelligent human–machine interfaces, are needed to control the EPW-SCs in the future. Some of these features are already available options in common EPWs. 82
In addition, taking into account that many users of EPW-SCs are elderly and may have cognitive or behavioral dysfunction, more user-friendly interfaces and applied machine learning algorithms 83 should be designed to make the EPW-SCs easier to use. This is also an important trend of future EPW-SC design.
Summary
As a useful tool both in clinical practice and robot research, EPW-SC has attracted an increasing amount of attention from the clinicians and researchers since the 1990s. Although a variety of prototypes have been developed successfully, and several commercial EPW-SCs are available on the market, it is necessary to develop more preferable devices and promote their usage among elderly populations and persons with disabilities.
The purpose of this article was to provide an overview of the EPW-SC development for the last two decades and to give insight into future trends. A classification of EPW-SCs was provided based on an analysis of various stair-climbing mechanisms. A summary of advantages and disadvantages was provided based on the following four aspects: control method, cost of mechanical manufacture, energy consumption, and adaption to different stairs. Lastly, common technologies used to maintain stability during stair-climbing were discussed to give insights into their future direction. Overall, this article is a summary of the current EPW-SCs and prospective technology based on research and may be able to provide insight in the development of more applicable and popular products.
Footnotes
Acknowledgment
The financial support from National Natural Science Foundation of China (NSFC) and Zhejiang Provincial Natural Science Foundation of China are gratefully acknowledged.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China (NSFC) under grant nos 51275244, 61428304 and Zhejiang Provincial Natural Science Foundation of China under grant no. LR15E050002.