
Abstract
Research on conflict evidence fusion is an important topic of evidence theory. When fusing conflicting evidence, Dempster-Shafer evidence theory sometimes produces counter-intuitive results. Thus, this work proposes a conflict evidence fusion method based on improved conflict coefficient and belief entropy. Firstly, the proposed method uses an improved conflict coefficient to measure the degree of conflict, and the conflict matrix is constructed to get the support degree of evidence. Secondly, in order to measure the uncertainty of evidence, an improved belief entropy is proposed, and the information volume of evidence is obtained by the improve entropy. Next, connecting with the support degree and information volume, We get the weight coefficient, and use it to modify the evidence. Finally, using the combination rule of Dempster for fusion. Simulation experiments have demonstrated the effectiveness and superiority of the proposed method in this paper.
Introduction
In real applications, data is obtained by sensors. However, due to the environmental uncertainty and faults in sensors, the obtained data is unreliable, inaccurate, and incomplete, leading to incorrect decisions. Therefore, multi-source information fusion technology has been developed. However, the data obtained through multiple sensors are sometimes completely conflicting. This problem has attracted significant attention, leading to the development of many theories, such as rough set theory [1], probability theory [2], fuzzy set theory [3, 4], generalized evidence theory [5], and Dempster-Shafer (D-S) evidence theory [6, 7].
Among these methods, D-S evidence theory as a generalization of probability theory [8] is not only effective in expressing random validity but also incomplete information. In addition, it also provides the powerful Dempster combination rule. Compared with other aggregation operators in information fusion [9, 10], this rule can satisfy excellent properties such as exchange law and synthesis law and can realize the fusion of evidence without prior information. Therefore, it has attracted the attention of many scholars [11–14]. However, challenges to D-S evidence theory still exist now. Firstly, the assumption of evidence independence may be difficult to satisfy in real application [15]. In addition, how to generate the basic probability (BPA) assignment is also an important problem [16, 17]. Furthermore, when using the combination rule of Dempster to fuse conflict evidence, counter-intuitive results may produce [18]. Recently, conflict evidence fusion under the D-S evidence theory scheme has gained considerable attention.
Currently, Approaches to conflicting evidence fusion can be classified into two main groups. The first class of approaches focuses on modifying Dempster’s rule of combination [19], which mainly studies the redistribution of conflict information. The second class focuses on the pretreatment of evidence, which mainly studies the allocation of the weight coefficient of fusion evidence. Since the method of modifying Dempster combination rules often destroys the excellent mathematical properties, significant research work has been done on evidence preprocessing methods. In the evidence preprocessing methods, the measurement of conflict degree and uncertainty [20–32], as the main means of such problems, has attracted the attention of many experts and scholars.
For measuring the conflict degree between evidence, Jousselme et al. proposed an evidence distance to measure the degree of conflict [20]. Liu measurs the degree of conflict by proposing the pignistic probability distance [21]. However, When the evidence completely conflicts, the above method will no longer be effective. Bi et al. indirectly measure the degree of conflict through the proposed similarity [22]. Zhang et al. using a modified cosine similarity for measuring the degree of conflict [23]. However, in some cases, the above method does not align with the intuitive analysis. So far, the problem of measuring the degree of conflict has not been solved. Entropy, as an important path to solve uncertain information, has attracted the attention of many scholars since its emergence and has developed various types of entropy [24–26]. For measuring the uncertainty of BPA, Deng proposed a new uncertainty measurement based on Shannon entropy [27]. Zhou et al. proposed an improved entropy considering the scale of the frame of discernment (FOD) and the focal element cardinality [28]. Tang et al. [29] proposed a weighted entropy by using the cardinality of the proposition and the cardinality of focal element. Pan and Deng proposed a new belief entropy by introducing belief function and the plausibility function [30]. Moreover, Qin et al. proposed an uncertainty measurement based on the number of elements and the conflict of BPA [31]. Gao et al. [32] proposed the uncertainty measure based on Tsallis entropy. Although the above-mentioned methods have some advantages, they do not fully utilize some information. For example, Deng’s method [27], Pan and Deng’s method [30] and Gao et al.’s method [32] did not consider the information between FOD and the focal element cardinality. In addition, none of the abovementioned methods can measure the uncertainty in the case of correlation between unit prime subset and multivariate prime subset.
In order to solve the problem of conflict evidence fusion, this paper proposes an effective method from the perspective of conflict degree and uncertainty. Firstly, an improved conflict coefficient is proposed to measure the degree of conflict among evidence and the support degree is obtained by conflict matrix. Secondly, considering the relationship between the focal element cardinality and the size of FOD, and the relationship between unit prime subset and multivariate prime subset, a belief entropy is proposed to measure the uncertainty, and the information volume is calculated from the proposed entropy. Next, the weight coefficient is determined by connecting with the support degree and information volume and used to modify the evidence. Finally, using the combination rule of Dempster for fusion. We verify the rationality of the proposed conflict measurement and uncertainty measurement through several examples. Simulation experiments are given to verify the superiority of the proposed conflict evidence fusion method.
The remainder of this paper is organized as follows. We introduced the preliminaries and existing conflict measurements in Section 2. Section 3 proposes a method of measuring the degree of conflict and analyzes some properties. A new uncertainty measurement method is proposed in Section 4. Section 5 introduces a fusion method. In Section 6, The proposed fusion method is applied to two experiments. Section 7 concludes this paper.
Preliminaries
Dempster-Shafer evidence theory
Where Θ is called a frame of discernment (FOD). The power set of Θ is defined as follows.
Where ∅ represents an empty set.
Where A is referred to as the focal element or proposition, the function m is called basic probability assignment (BPA).
if the function Bel, Pl: 2
Θ → [0, 1], satisfies:
Then Bel and Pl are called the belief function and plausibility function respectively.
Where K described in (7) is representative conflict coefficient.
Although the conflict coefficient has wide applicability, research shows that in some cases, it has certain limitations. Consider the following examples.
Example 1: Let Θ ={ θ1, θ2, θ3, θ4, θ5 } be the FOD, in which BPAs can be described as follows.
In Example 1, evidence m1 and m2 have the same degree of support for each focal element, there is no conflict. However, the results of K = 0.8 obtained by calculating the conflict coefficient show that the conflict coefficient has some defects. Therefore, many researchers strive to develop novel conflict measurement approaches. Several proposed approaches are shown in Table 1.
Several methods for assessing the degree of conflict
Several methods for assessing the degree of conflict
In Table 1,
Example 2: Let Θ ={ θ1, θ2, ⋯ , θ10 } be the FOD, in which BPAs in four different cases can be described as follows.
Table 2 shows the results of example 2 using different methods. It can be seen from the BPAs in cases 1 to 4 that m1 and m2 are complete different. However, it can be seen from Table 2 that Jousselme et al.’s method [20] and Liu’s method [21] are not 1. Therefore, these methods have obvious limitations in the above cases.
Results of different methods in example 2
Example 3: Let Θ ={ θ1, θ2, θ3 } be the FOD, in which BPAs can be described as follows.
In Example 3, the improved methods proposed by Bi et al.’s method [22] and Zhang et al.’s method [23] are used to calculate the degree of conflict, the results are sim (m1, m2) =1 and ConfDegree (m1, m2) = 0 that demonstrate no conflict between evidence. However, m1 and m2 are not identical, so the above methods also have certain limitations.
According to the analysis of Section 2.2, the existing conflict degree measurement methods have some limitations. Therefore, we propose an improved conflict coefficient.
In this section, an improved conflict coefficient is proposed based on the correlation coefficient and conflict coefficient. The proposed conflict coefficient is defined in (8).
Where K = ∑B∩C=∅m
i
(B) m
j
(C) and
(1) Boundedness 0 ≤ k (m i , m j ) ≤1.
(2) Symmetry k (m i , m j ) = k (m j , m i ).
(3) Uniformity m i = m j ⇒ k (m i , m j ) =0.
Proof. (1) Since the correlation coefficient between m i and m j satisfies 0 ≤ r (m i , m j ) ≤1, 0 ≤ 1 - r (m i , m j ) ≤1. Since the conflict coefficient between m i and m j satisfies 0 ≤ K (m i , m j ) ≤1, 0 ≤ k (m i , m j ) ≤1.
Proof. (2)
Proof. (3) When m
i
= m
j
, the correlation coefficient between m
i
and m
j
is 1, obviously, the improved conflict coefficient
In Example 1, with the improved conflict coefficient to solve the conflict measurement problem of example 1, k (m1, m2) =0 can be obtained that satisfies the theoretical analysis.
In Example 2, with the improved conflict coefficient to solve the conflict measurement problem of example 2, the results of conflict degree are shown in Table 3. Compared with Jousselme et al.’s method [20] and Liu’s method [21], the proposed conflict measurement method is more effective.
With the improved conflict coefficient to solve example 2
In Example 3, with the improved conflict coefficient to measure the degree of conflict, we can get k (m1, m2) =0.1155. Compared with Bi et al.’s method [22] and Zhang et al.’s method [23], the proposed conflict measurement method is more reasonable.
Next, Example 4 is used to further illustrate the effectiveness of the improved conflict coefficient in measuring the degree of conflict.
Example 4: Let Θ ={ θ1, θ2 } be the FOD, in which BPAs can be described as follows.
Supposing a varying from 0 to 1, the degree of conflict in each case is shown in Fig. 1.
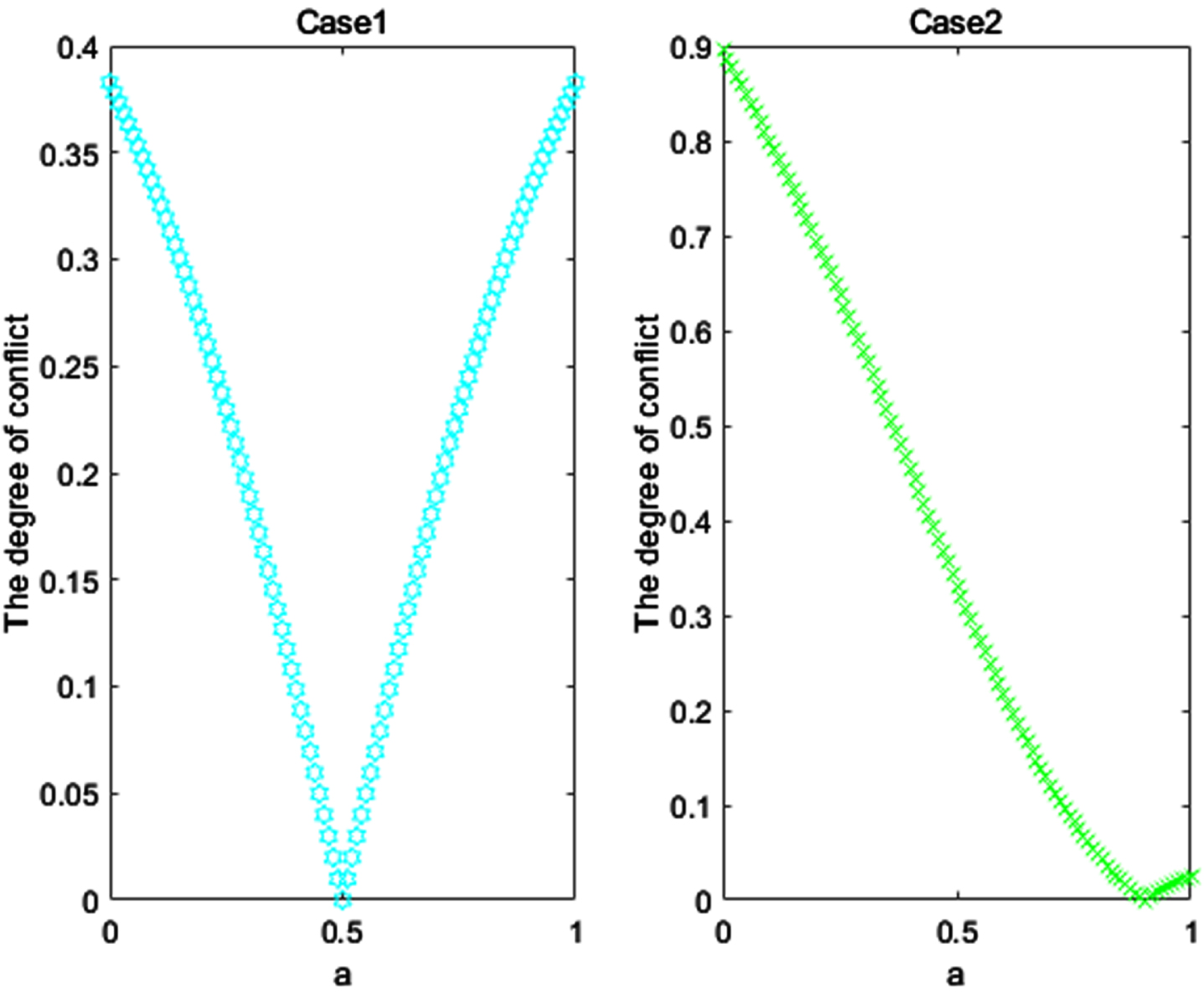
The variation in the degree of conflict with respect with respect to change in parameter a.
When a = 0.5 and a = 0.9 there is no conflict in both cases 1 and 2. With the change of a, the degree of conflict changes.As seen in Fig. 1, with the increase in a, the degree of conflict between each group first decreases and then increases, reaching the minimum value of 0.
Existing uncertainty measurements
Some typical uncertainty measurement methods are introduced, as shown in Table 4.
Uncertainty measure methods under the D-S evidence theory
Uncertainty measure methods under the D-S evidence theory
Where |Θ| represents the scale of FOD. These existing uncertainty measurements also have some limitations. Consider the following examples.
Example 5: Assuming independent data obtained by two different sensors, in which BPAs can be described as follow.
It can be found that the mass assignment of m1 and m2 are same, while FODs of m1 and m2 contains {θ1, θ2, θ3, θ4} and {θ1, θ2, θ3}, respectively. Intuitively, the uncertainty of m1 is greater than that of m2. Some methods including Deng’s method [27], Pan and Deng’s method [30], Gao et al.’s method [32] and Pal et al.’s method [33] are employed to solve Example 5. Table 5 shows the uncertainty results of different methods.
Results of different methods of example 5
Table 5 shows that Deng’s method [27], Gao et al.’s method [32] and Pal et al.’s method [33] cannot distinguish the uncertainty difference between m1 and m2. Moreover, the uncertainty of m1 is less than that of m2 in the Pan and Deng’s method [30], leading to counterintuitive result. Since neglecting the influence between the FOD and the cardinality of the focal element, the above uncertainty measurement methods have obvious defects under Example 5.
Example 6: Let Θ ={ θ1, θ2, θ3 } be the FOD, in which BPAs can be described as follows.
It can be found that the belief degrees of m1, m2 and m3 assigned to {θ1} and {θ2} are the same. While the belief degrees of m1,m2 and m3 respectively assigned to {θ1, θ2}, {θ1, θ3} and {θ2, θ3} are all 0.4. Intuitively, the uncertainty of m1 is the least. The uncertainty of m2 is great than that of m1 and lower than that of m3. Some existing methods are used to calculate the uncertainty of the different BPAs described in Example 6. The results are shown in Table 6.
Results of different methods of example 6
Table 6 shows that the above methods are invalid. Since the above-mentioned methods neglect the effect of multivariate prime subset on unit prime subset, they cannot effectively measure the difference between BPAs. Examples 5 and 6 show that the existing uncertainty measurement methods have certain limitations.
To effectively measure the uncertainty, a new belief entropy is proposed in this section, the proposed method is as follows.
It can be seen from Equation (9) that the proposed belief entropy contains the relationship between the focal element cardinality and FOD, and introduces the belief function to combine unit prime subset and multivariate prime subset. Thus, the proposed belief entropy can describe information that is uninvolved in other methods. In addition, We also analyze some properties as follows.
(1) Mathematically.
(2) Nonnegativity.
(3) Probability consistency.
(4) Nonadditivity.
(5) Nonsubadditivity.
Proof. (1) The proposed entropy belongs to [0 + ∞). Since |A|, |Θ| belong to [1 + ∞), and e|A|/|A|-1/|Θ|) belongs to [1, + ∞), and
Therefore, the proposed entropy belongs to [0, + ∞).
Proof. (2) From property 1, we can know
Therefore, the proposed belief entropy satisfies nonnegativity.
Proof. (3) When |A| → 1, we can get Bel (A) = m (A). At this time
Therefore, the proposed belief entropy satisfies probability consistency.
Proof. (4) The proposed belief entropy does not satisfy additivity. This means that the following condition is not met.
Example 7. Let X ={ x1, x2, x3 }, Y ={ y1, y2 } be two FODs, X × Y is the product space of Xand Y, in which BPAs can be described as follows.
where z
ij
= (x
i
, y
j
), the uncertainty calculated by the new method is as follows.
Clearly,H L (m) ≠ H L (m1) + H L (m2), thus the proposed belief entropy does not satisfy additivity.
Proof. (5) The proposed belief entropy does not satisfy subadditivity. This means that the following condition is not met.
Example 7 shows H L (m) > H L (m1) + H L (m2). Thus, the proposed belief entropy does not satisfy subadditivity.
In Example 5, the proposed belief entropy solves the uncertainty measurement problem and provides H L (m1) = 1.6103 > H L (m2) = 1.4901. This result means that the uncertainty of m1 is greater than m2, which meets the theoretical analysis.
In Example 6, the proposed belief entropy solves the uncertainty measurement problem and provides H L (m1) = 1.7537 < H L (m2) = 1.7876 < H L (m3) = 1.7907.This result means that the uncertainty of m1 is the least, the uncertainty of m2 is great than that of m1 and lower than that of m3, which is consistent with the previous analysis.
Next, we use example 8 to further verify the effectiveness of the proposed entropy.
Example 8: Let Θ ={ 1, 2, . . . , 15 }, be the FOD, the number of elements in A increases sequentially from 1 to 14, in which BPA can be described as follows.
The uncertainty of different methods increasing with number of elements in the subset A are described in Fig. 2.
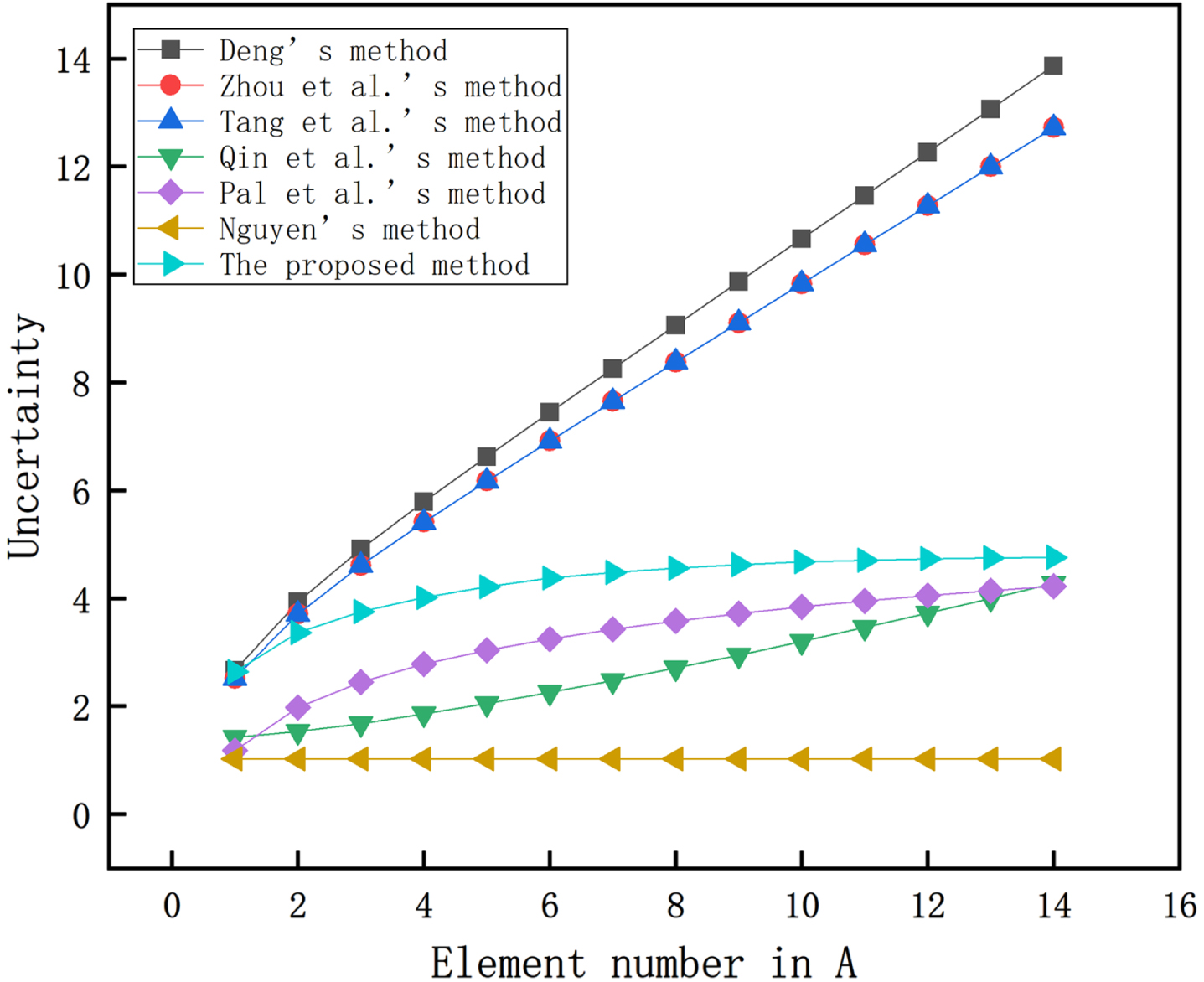
The uncertainty of different methods.
From Fig. 2, the uncertainty of BPA in all methods increase with the increase in the number of elements in A, except for the Nguyen’s method [34] where the uncertainty remains unchanged. Thus, Nguyen’s method may not effectively measure the uncertainty of BPA in Example 8, while since the cardinality of the focal element is involved, other methods and the method proposed can effectively measure the uncertainty.
Inspired by the weighted average methods, the improved conflict coefficient is combined with the belief entropy to propose a fusion method to solve the counter-intuitive problem. The proposed method is divided into ten steps as shown in Fig. 3.
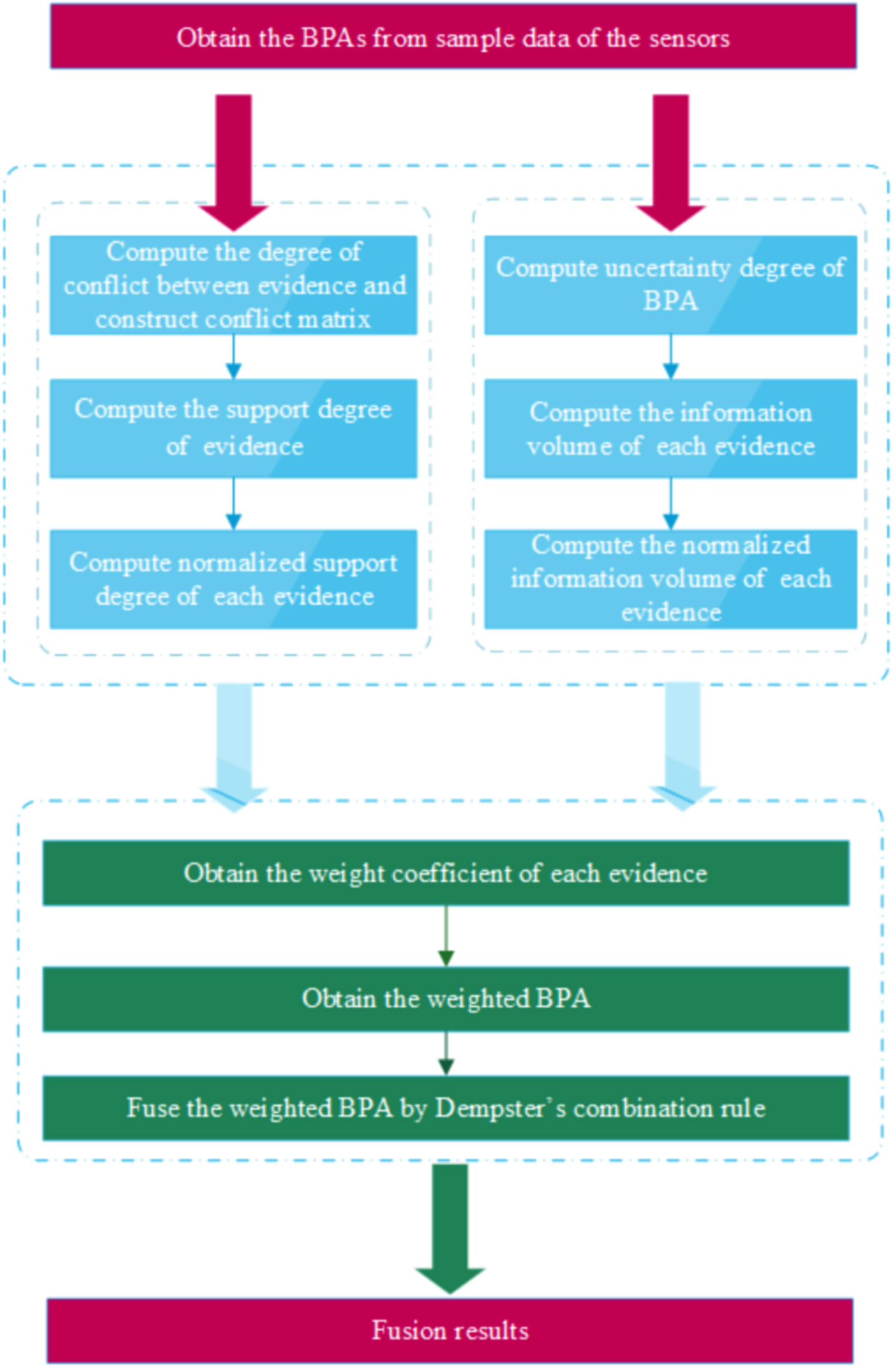
The steps of fusion method.
Step 1. Obtain the BPAs from sample data of the sensors.
Step 2. The degree of conflict k (m
i
, m
j
) is calculated using Equation (8), which is recorded as ki,j, and the conflict matrix
Step 3. According to the conflict matrix, the support degree Sup
i
of m
i
is calculated using Equation (13).
Step 4. The normalized support degree
Step 5. The uncertainty degree of m i is described as belief entropy, which can be calculated using Equation (9).
Step 6. According to the belief entropy of evidence m
i
, the information volume of m
i
is calculated using Equation (15).
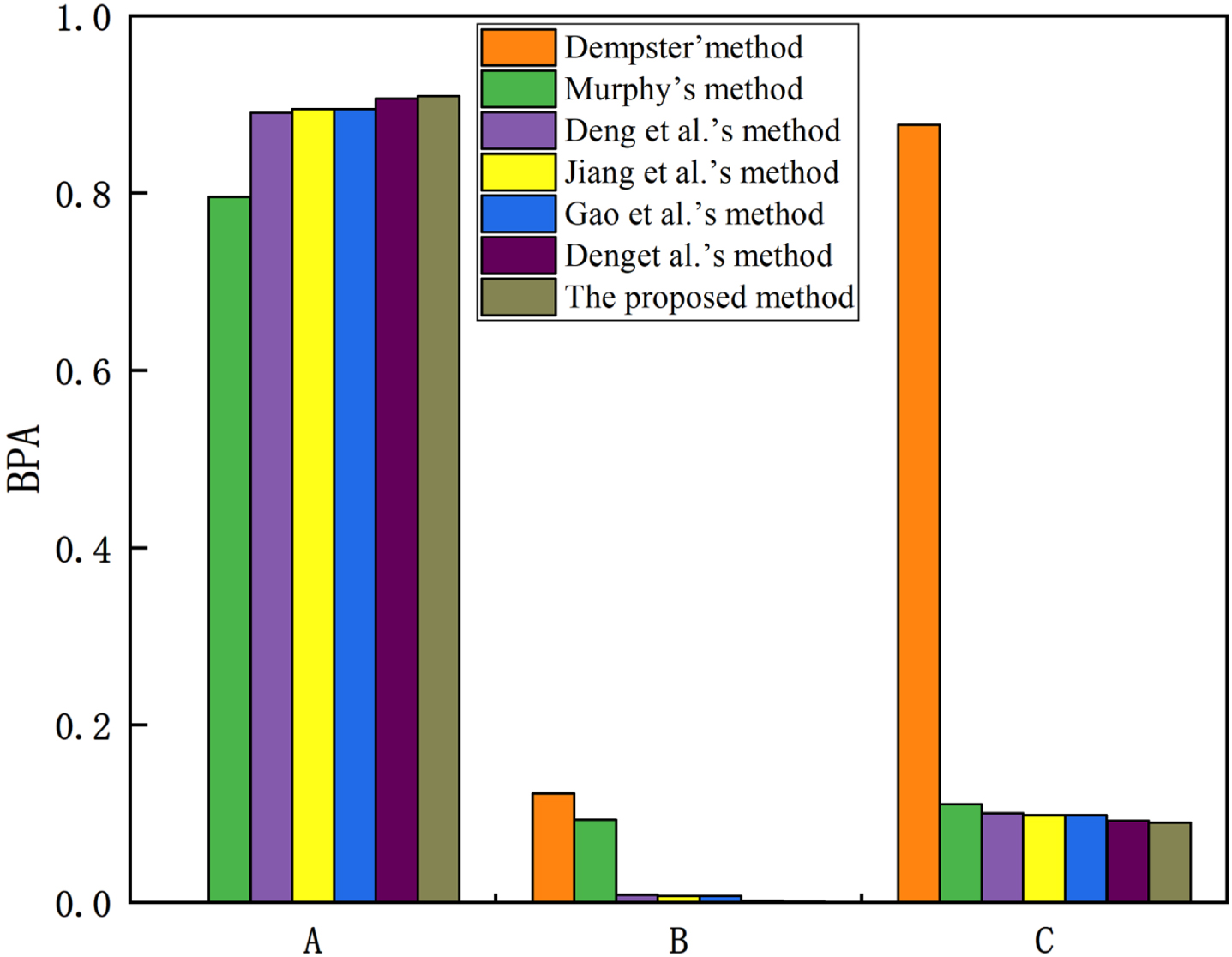
Experiment 1. There are 5 different types of sensors for identifying air targets, assuming the FOD is Θ ={ A : Civilaircraft, B : Bomber, C : Helicopter }, in which BPAs can be described as follows.
The above problem is solved by the proposed fusion method. The fusion results of different methods in Experiments 1 are shown in Table 7, Fig. 4 and Fig. 5.
Final fusion results of different methods in Experiment 1
Final fusion results of different methods in Experiment 1
The final fusion results of different methods in Experiment 1.
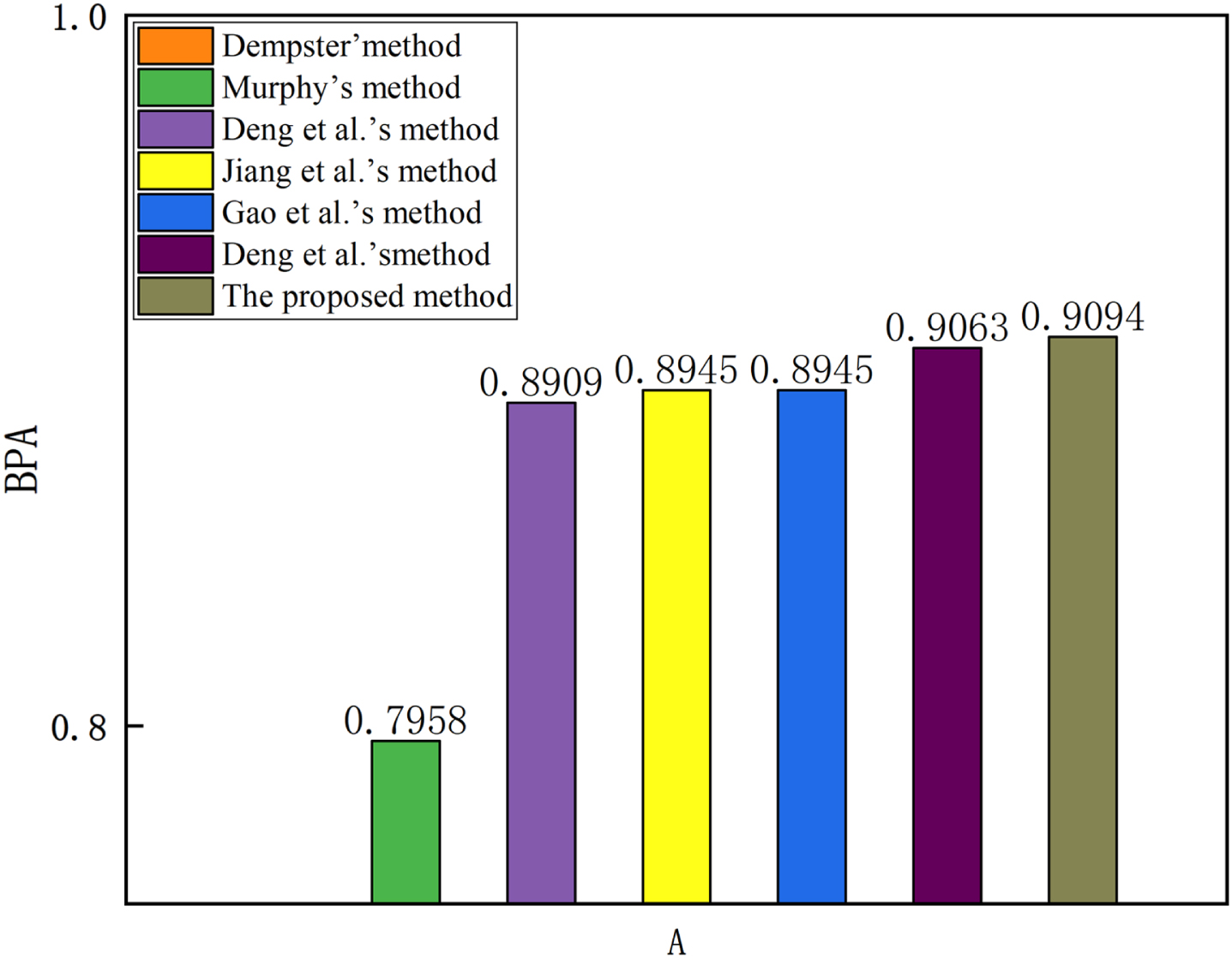
The fusion results of different methods on A in Experiment 1.
In Experiment 1, it can be found that show that evidence S2 supports bomber B and the other evidence support civil aircraft A. One may deduce that evidence S2 conflicts with other evidence. The real result should be civil aircraft A. Table 7 shows that the method of Dempster is invalid. Figures 5 show that except for Dempster’s method, other methods consider civil aircraft A, and the result of proposed method is 0.9094, which has the highest fusion result. Experiment 1 verifies that the counter-intuitive problem can be effectively solved when the FOD contains multiple single subset propositions.
Experiment 2. There are 5 types of sensors placed at different positions in the same environment to collect aircraft engine operating data, assuming the FOD is Θ ={ A, B, C }, where A, B, and C represent fracture failure, aging failure, and corrosion failure, respectively. The BPAs can be described as follows.
The above problem is solved by the fusion method proposed. The fusion results of different methods in Experiments 2 are shown Table 8, Figs. 7.
Final fusion results of different methods in Experiment 2
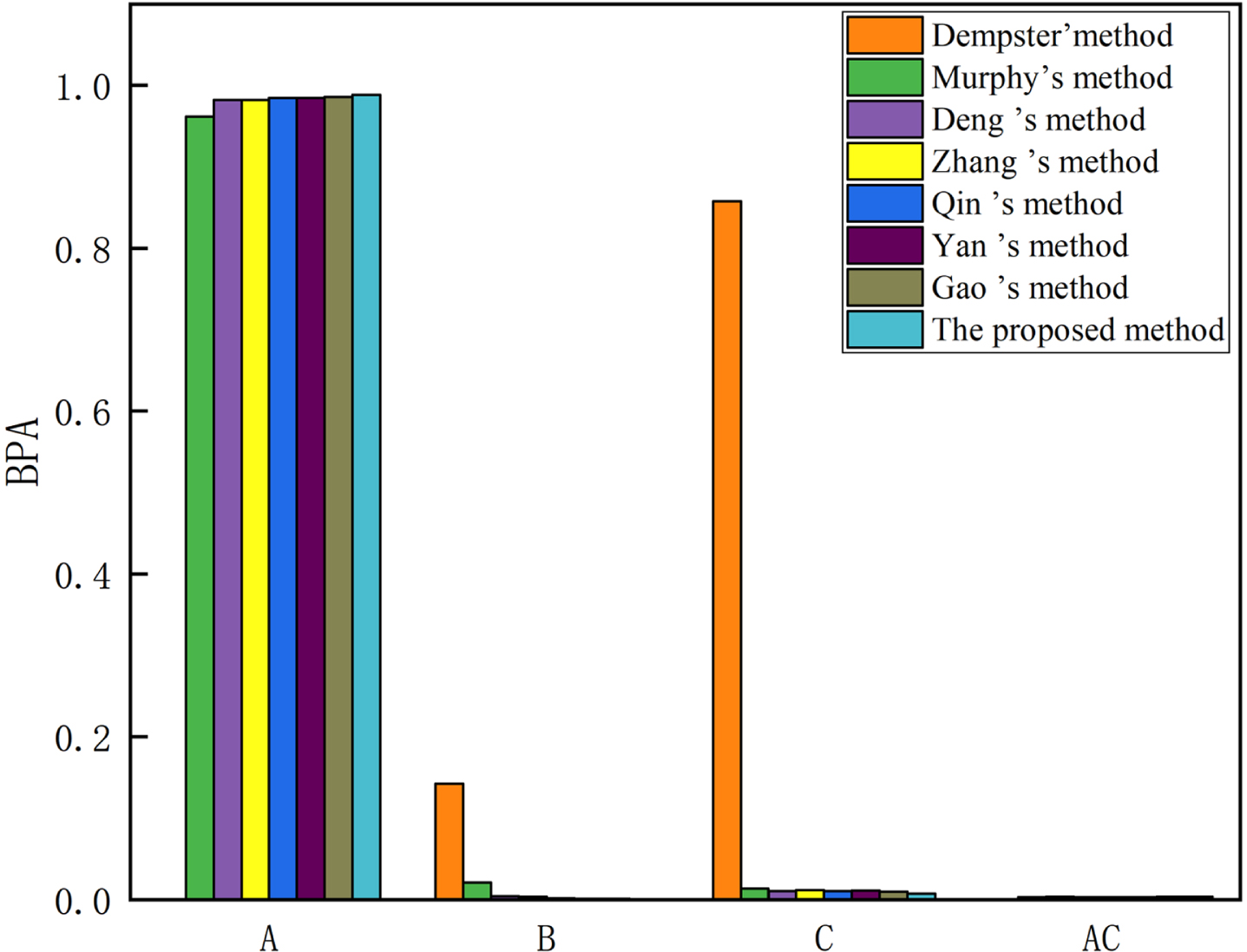
The final fusion results of different methods in Experiment 2.
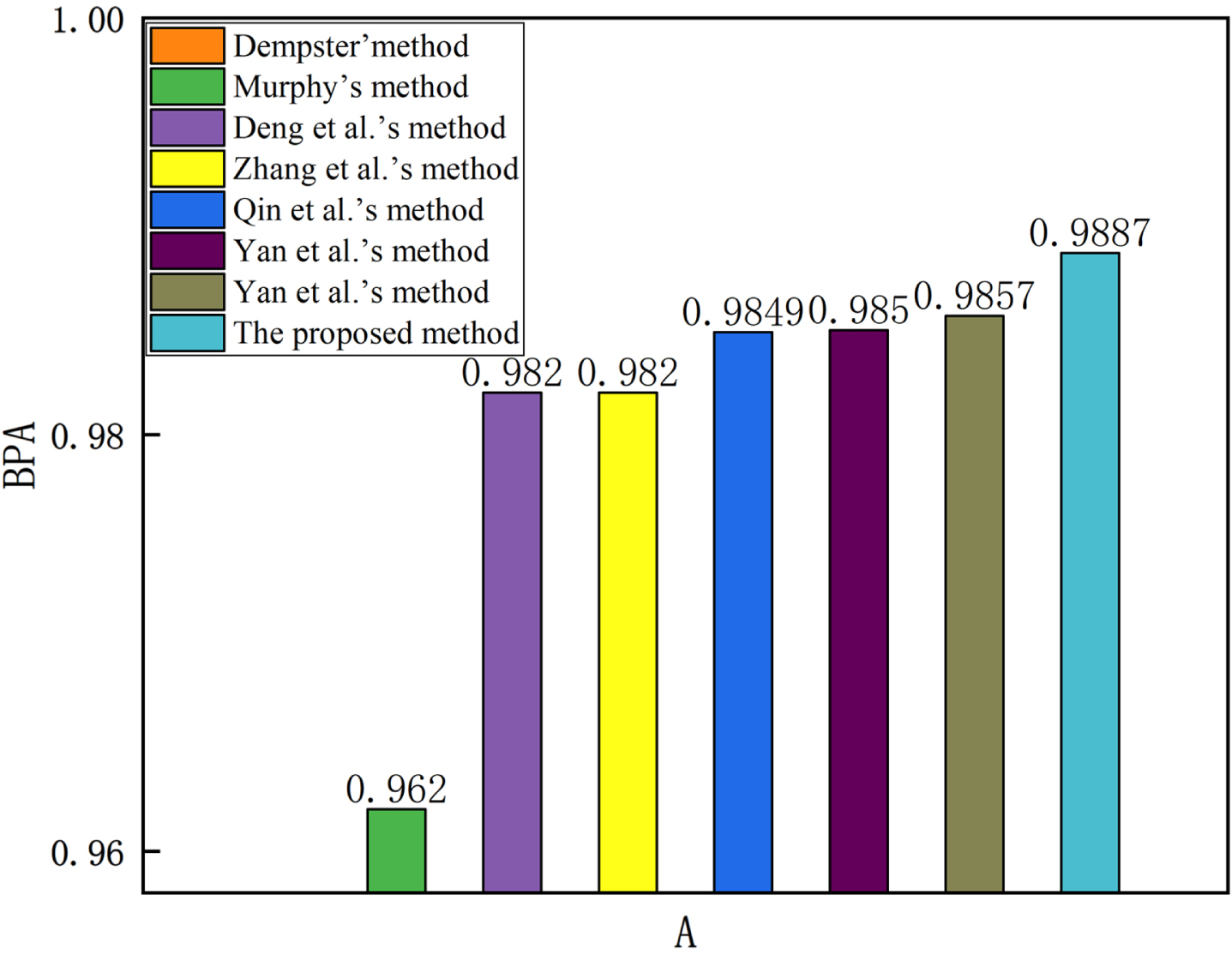
The fusion results of different methods on A in Experiment 2
In Experiment 2, it can be found that except for evidence S2, other evidence support fracture failure A. Obviously, evidence S2 conflicts with other evidence. The real result should be fracture failure A. Table 8 shows that the fusion result of Dempster’s method is corrosion failure C, which violates the intuitive requirements. Figure 7 show that except for the method of Dempster, other methods consider fracture failure A, and the result of proposed method is 0.9887, which is the highest among all methods. Experiment 2 verifies that the problem of the counter-intuitive problem of conflict evidence fusion can be effectively solved when the FOD contains multiple subset propositions.
The main contributions of this paper are as follows. (1) An improved conflict coefficient is proposed by combining the conflict coefficient and correlation coefficient, which can effectively address the shortcomings of existing conflict measurement methods. (2) A new belief entropy is proposed, which considers the information between FOD and the cardinality of the focus element, as well as the correlation between subsets, making it more effective in measuring the uncertainty of BPA than other uncertainty measurement methods. (3) The comprehensive weight of evidence is determined based on the degree of conflict and uncertainty, which solves the counter-intuitive result that occurs during the fusion of conflicting evidence. Simulation experiments verified the effectiveness and superiority of the proposed method.
Overall, the proposed method can effectively address the counter-intuitive result that arises during conflict evidence fusion and has significant advantages compared to other methods. However, there are some issues that require further research, such as the generation of BPA. In future research, we will further study the generation of BPA in order to better apply it to the field of fault diagnosis.
Footnotes
Acknowledgments
This work is supported by the National Natural Science Foundation of China (No.61976080, No.617710 06), the Program for Science and Technology Development of Henan Province (No.222102210004), and the Key Research Project of University in Henan Province (No.20B510001).