
Abstract
The rise in global travel has led to an increased need for heightened security measures at airports. Despite the best efforts of airport security officers, in the past year, hundreds of kilograms of illegal drugs and thousands of agricultural invasive species have found their way into the country, posing a severe threat to public safety and the environment. Moreover, human threats pose a significant risk to civil aviation, reinforcing the need for advanced security technology. In response to these challenges, NOSI (Novel Odor Sensing Intelligence) and ROSI (Reconnaissance Operations Security Intelligence), intelligence surveillance systems consisting of semi-autonomous controller-responder robots, were developed as a proof of concept to supplement the efforts of security and K-9 (police dogs) operators at airports. NOSI is equipped with multi-channel gas sensors for odor detection, enabling it to identify illegal drugs and invasive species in the baggage handling process, while ROSI is equipped with computer vision to identify individuals already in the government’s database of persons of interest. These coordinated robots also provide travelers with important information pertaining to their journey and allow them to trigger emergency alerts. The robots were tested in a custom-designed test bed that replicated both the behind-the-scenes baggage handling and front-office customer service operations of an airport, thus simulating a realistic airport-like setting. Based on design criteria, NOSI and ROSI demonstrated success rates of 73.4 percent and 69.8 percent, respectively. Improvements in areas of robot stability, sensor accuracy, and feature expansion were documented for further development. In conclusion, the NOSI and ROSI framework can enhance the efficiency and accuracy of airport infrastructure monitoring and supplement the capabilities of human and K9 operators. Overall, this approach can potentially revolutionize operations in various infrastructures and represents the future of human-robot collaboration.
Keywords
Introduction
Screening checkpoints are a key line of defense against the introduction of dangerous entities into the aviation system. Airports accommodate an immense number of travelers, as evidenced by U.S. airlines alone carrying a staggering 853 million passengers in 2022 [1]. However, our current airport security systems, while screening millions of travelers, still fall short in detecting significant amounts of drugs, invasive species, and human threats. This gap in detection poses a serious risk to our safety and security.
The situation is expected to escalate further, with an estimated 16 billion passengers projected to be flying by 2050 [2]. As the number of passengers and baggage passing through airport security systems continues to rise each day, there is an urgent need to implement automation and advanced technology to assist airport security personnel in enhancing hazardous material detection, countering human threats to aviation, and alleviating the strain on the overburdened security.
Smuggling of drugs
Airports play a pivotal role in global travel and commerce, making them attractive targets for criminals involved in drug trafficking, transnational organized crime, and even acts of terrorism [3]. The large flow of passengers and goods passing through airports presents opportunities for illegal activities to go unnoticed [4].
The consequences of drug smuggling through airports are far-reaching and deeply concerning [5]. Illicit drugs, such as fentanyl, cocaine, and methamphetamine, find their way into communities, fueling drug abuse and addiction. This not only poses serious health risks for individuals but also places a significant burden on public health systems. The rise in drug-related health issues strains healthcare resources and diverts attention from other critical medical needs.
Furthermore, the illicit drug trade thrives on criminal networks that exploit vulnerable individuals and communities. These criminal organizations engage in a wide range of illegal activities beyond drug trafficking, perpetuating violence and instability in various regions. The presence of such criminal networks also contributes to an increase in other forms of organized crime, impacting law enforcement efforts and public safety [6].
The impact of drug trafficking doesn’t stop at the local level; it affects the broader economy as well. The healthcare costs associated with drug-related treatment and rehabilitation place a significant financial burden on governments and taxpayers. Additionally, drug abuse and addiction can lead to lost productivity in the workforce, reducing economic output and hindering societal progress [7].
Smuggling of agriculture
Agricultural smuggling has become a significant threat to climate change, biodiversity preservation, and public health. The needless exploitation of nature by humans has resulted in unprecedented biodiversity loss and a worsening climate crisis [8].
Airports can play a significant role in agricultural smuggling due to their key function as international transit hubs. In our interconnected world, countries grapple with managing the risks associated with biological invasion [9]. Invasive plants, introduced through agricultural smuggling, pose serious challenges to ecosystems as they disrupt native communities and alter the structure and functioning of the environment. Invasive species invasions are already among the most threatening mechanisms of global change [10, 11].
Human threats
Effectively addressing human threats while maintaining smooth passenger flow is an immensely challenging task [12]. Human threats against civilization, including organized criminal attacks and terrorism, pose significant risks to passenger safety and overall societal security, driving illicit economies that fuel conflicts [13]. The inability to provide constant vigilance against these threats compromises the well-being of travelers, increases the potential for disruptive incidents, and undermines public confidence in aviation security measures.
Overburdened security
The surge in flights following the recent pandemic has undoubtedly put immense pressure on airport security officers, resulting in an understaffed and overworked situation that has far-reaching implications for airport security and efficiency [14]. The sudden increase in passenger volumes has outpaced the resources available, leading to critical challenges in maintaining a robust security apparatus.
With security operations at airports stretched thin, the ability to execute thorough and comprehensive security checks on all passengers and their belongings becomes compromised. Screening processes that would typically involve multiple layers of scrutiny may now be streamlined or even skipped due to time constraints. As a result, potential threats might slip through the cracks, creating vulnerabilities that could be exploited by malicious actors.
Overburdened security personnel are more susceptible to fatigue, stress, and lapses in concentration, which can impact their ability to remain vigilant and respond promptly to security incidents. In high-pressure situations, swift and decisive action is crucial, and any delays or errors in response times could have dire consequences. Moreover, the mental and physical strain on security officers may affect their performance and overall morale, which can further exacerbate the challenges they face in safeguarding the airport [15].
Literature search
Gaps in airport security
The United Nations Office on Drugs and Crime has brought into focus the role of airports as significant centers for a range of unlawful activities, including drug trafficking, organized crime, and the potential for acts of terrorism, thereby posing a direct threat to urban safety [16]. While current airport scanning technology may not directly identify drugs, it plays a crucial role in aiding well-trained security personnel in visually pinpointing illicit substances [17].
Moreover, the trafficking of invasive agricultural species has garnered considerable attention due to its adverse impacts on climate, biodiversity, security, and public health. Notably, the past year has witnessed a substantial number of reported seizures involving these intrusive species [8]. Furthermore, human threats introduce an element of danger and unpredictability, as individuals with malicious intent may adeptly adjust their tactics to evade detection. This underscores the pressing need for a continuous drive towards innovation and refinement in security protocols [18].
The baggage handling process
Baggage operations are divided into departure and arrival categories, each encompassing subcategories like sorting, unloading, loading, and conveyance. Checked-in bags undergo security checks, typically two x-ray scans and one manual inspection, before proceeding through a conveyor belt equipped with infrared scanners. These scanners read bag tags and transmit data to an online system for sorting and routing to the respective airline [19]. Notably, most illicit substances are often concealed within checked-in bags, highlighting the significance of effective security measures in the baggage handling process [20].
Humans and robots
The implementation of human-robot interactions illuminates the increasing acceptance of robots in everyday life and the pivotal role of trust rooted in performance or relations [21]. Meanwhile, it is very important that the deployers of robots understand the need for and focus on ensuring robot safety in public spaces through policy and end-user training [22]. Lastly, robots have transitioned from their utilitarian origins to find diverse and modern applications [23]. Collectively, these perspectives enhance our comprehension of the intricate interplay between trust dynamics, imperatives of safety, and the evolving trajectory of robotics.
Reconnaissance and airport robots
Reconnaissance robots play a pivotal role in collecting critical information and data from challenging or hazardous environments, often employed in public safety contexts such as disaster response, search and rescue missions, and law enforcement activities [24]. Security and surveillance robots contribute significantly to enhanced security measures by monitoring areas, detecting anomalies, and relaying real-time information to human operators [25]. Equipped with high-definition cameras, motion and heat sensors, and AI capabilities, these robots bolster security efforts effectively. Although innovative airport technologies may not directly align with the construction of a reconnaissance robot, the integration of advanced solutions like biometric identification, automated baggage handling, and smart kiosks in airport settings offers valuable insights for similar engineering endeavors [26]. The increasing use of robots in airports, such as Spencer and Pepper (the Robo Waiter), for tasks like wayfinding and passenger assistance underscores the potential benefits of deploying autonomous systems in complex public environments [27].
Additionally, the study highlights an important aspect as it delves into the notable limitations presented by the accuracy of drug-sniffing dogs in identifying illicit substances. Extensive research has unveiled disconcertingly high error rates, with some instances surpassing a 50 percent threshold [16]. These findings accentuate the potential insufficiency of relying solely on canine detection to attain the necessary level of reliability crucial for security purposes.
In today’s world, keeping airports safe and operational is crucial, leading to the creation of various robotic solutions to help with security and passenger support. This list below seeks to contrast the capabilities of several existing airport robots that possess distinctive attributes.
Knightscope’s K5 – Security Robot [28]
Objective: K5 is an autonomous crime-fighting security robot designed to patrol malls, offices, and parking lots. Merits:
24/7 surveillance without breaks Can analyze various environmental factors simultaneously since it is equipped with an array of sensors, cameras, LIDAR, and thermal imaging Fully integrated with Knightscope’s Security Operation center user interface to generate real-time alerts Opportunities:
The core emphasis of Knightscope’s K5 robot lies in security surveillance, anomaly detection, and data collection through its array of sensors and cameras. While proficient at fortifying airport security against human threats, the K5 does not possess the capability to detect specific substances, chemicals, or biological markers associated with drugs or invasive species, nor does it contribute to enhancing the broader passenger experience. LG’s Airport Guide Robot [29]
Objective: Designed to provide information, directions, and language translation to passengers. Merits:
Multilingual passenger assistance Integration with a central server for flight details and airport amenities With a quick scan of a boarding pass, the Airport Guide Robot can escort the late or lost traveler to the right departure gate on time. Opportunities:
Designed to handle only basic inquiries. These robots are primarily designed for information assistance and wayfinding.
Cobalt Robotics – Security Screening Robot [30]
Objective: Cobalt is an indoor security guard robot that can recognize faces, check badges, and use an array of sensors to identify potential security or environmental threats. It navigates both autonomously and under the supervision of a human operator. Merits:
Advanced Threat Detection supported by a variety of sensors, including cameras, LIDAR, and thermal imaging Remote Operation and Intervention through two-way audio and video communication Opportunities:
Cobalt Robotics’ limitations might include potential difficulties in navigating complex or cluttered environments. Further research needs to be conducted to improve the navigation algorithm for better adaptability in complex environments. Koni Kore – Neurotechnology based robot [31]
Objective: Develop sensors that integrate living biological neurons with silicon circuits, aiming to utilize their sensing capabilities for applications such as environmental monitoring, disease detection, and security tasks. Their device mimics the tiny receptors found inside some of the planet’s powerful noses. Merits:
Koni Kore merges synthetic biology with silicon to build machines that detect smells. Biological neurons are capable of complex signal processing, which could be beneficial in identifying specific chemicals or odors. Living neurons enhance detection accuracy and reliability by recognizing subtle changes and patterns in sensory inputs, surpassing electronic sensors. Opportunities:
An innovative blend of biological and electronic components could lead to interdisciplinary breakthroughs, fostering collaboration between fields like biotechnology, neuroscience, and robotics.
Anbot - police robot [32]
Objective: Anbot is primarily intended for security and public safety applications. It is often deployed in public spaces such as airports, train stations, and other crowded areas to assist with surveillance, crowd control, and emergency response. Merits:
Advanced surveillance cameras for real-time video feed to operators Loudspeaker and microphone for two-way communication with personnel or the public Analyzes light and sound for criminal detection, capable of chasing at 18 KM/hour Provides directions, identifies fires, and monitors air quality Can emit non-lethal electric charge to respond to riots Opportunities:
Presently, Anbot functions as a police robot with restricted autonomy. There’s potential for enhancement through modular attachments enabling diverse tasks, including transporting medical supplies, fire suppression equipment, or supplementary sensors, thus expanding its capabilities.
K-9 operators play a crucial role in airport security and surveillance. K-9 operators are deployed to detect a wide range of threats, including explosives, narcotics, and contraband. Their keen senses and rigorous training allow them to identify hidden dangers that might otherwise go unnoticed. However, it’s essential to acknowledge that while K-9 units are a valuable asset in airport security, the study also underscores the limitations of solely depending on them for detection, particularly in the case of drug and invasive species detection. As the research shows, there can be significant inaccuracies in drug detection, with K-9s having an accuracy rate of less than 50 percent [16], reinforcing the need for a multifaceted approach to airport security that combines canine teams with other advanced technologies and methodologies to ensure the highest level of reliability and safety.
This comprehensive literature analysis illustrates the diverse landscape of robots catering to distinct security and passenger assistance needs within airport environments. Additionally, the study highlights an important aspect as it delves into the notable limitations presented by the accuracy of drug-sniffing dogs in identifying illicit substances. Extensive research has unveiled disconcertingly high error rates, with some instances surpassing a 50 percent threshold [16]. These findings accentuate the potential insufficiency of relying solely on canine detection to attain the necessary level of reliability crucial for security purposes.
Significance of research
The research’s significance lies in its thorough exploration of the diverse range of robots utilized in airport services. By meticulously analyzing how these robots cater to distinct security needs, the study highlights the prevailing pattern of designing robots for either security or operational efficiency, but not both concurrently.
As international and domestic air travel continues to grow each year, airports face the challenge of expanding their infrastructure and operational systems to accommodate the increasing demand. This expansion includes the addition of new terminals, check-in counters, and baggage handling facilities. Simultaneously, passenger expectations have risen, with a strong desire for a seamless and swift baggage handling process and efficient security checkpoint procedures [34]. The strain on airport staff and systems is constant as they strive to adapt to these ongoing expansions and meet passenger assistance, high customer expectations, and threat management processes [34]. With security and airline personnel dispersed across various terminals, employing both manual and automated methods for security checks and passenger support, there exists a heightened risk of security breaches as passengers and their luggage move between terminals and baggage facilities [34].
The integration of automation and robotics into these decentralized airport environments presents a tremendous opportunity. With security and airline personnel decentralized across terminals using manual and automated processes for security checks and passenger assistance, there is a high probability of security lapses as passengers and bags move across the terminals and baggage infrastructure, respectively. As more automation and robots get introduced into these decentralized environments, it would be of great benefit for the Robots to consolidate security and passenger assistance and surveillance capabilities, communicating in real-time, sharing critical information with each other, and working in tandem. Moreover, by combining threat intelligence from multiple robots in real-time, which includes passenger and surveillance data, the likelihood of identifying emerging threats would significantly increase and also provide security personnel or related algorithms a contextual understanding of the shared data to make a more accurate and quick informed decision.
This research aims to bridge this gap by fusing the versatile capabilities of various distinct robots into a single controller-responder robot framework with inter-robot communications for seamless integration of security protocols with passenger assistance.
This research proposal centers on the development of two robots: NOSI (Novel Odor Sensing Intelligence) and ROSI (Reconnaissance Operations Security Intelligence). The primary goal is to provide support to airport security personnel across a diverse range of tasks. These tasks include detecting and identifying drugs, invasive species, persons of interest, and potential suspects. Moreover, these robots are designed to offer emergency assistance and travel aid to passengers in need.
NOSI is responsible for detecting drugs and invasive species concealed within baggage areas, much like the acute olfactory senses of K-9 units. Concurrently, ROSI assumes the vigilant role of a police officer, meticulously scanning the airport premises to identify individuals of interest and offering emergency and travel assistance to passengers. This research delves into the seamless integration of NOSI-ROSI controller-responder robots and their capabilities to enhance operational efficiency across extensive infrastructures such as airports. The proposed methodology involves an experimental analysis, drawing insights from both qualitative and quantitative data sources. The ultimate aim is to introduce a comprehensive airport infrastructure monitoring framework capable of elevating airport security operations by providing invaluable aid to security personnel and their indispensable K-9 counterparts.
Proposed solution
This section discusses the criteria, constraints, materials, software tools, subsystems, and assembly of NOSI & ROSI in-depth.
Criteria and constraints
During the design and construction of NOSI and ROSI, adhering to specific criteria and constraints is of utmost importance. These robots must serve different roles within the airport, with NOSI operating behind the scenes in the baggage handling process and ROSI interacting with the crowd. To facilitate effective communication and collaboration with existing security personnel, both robots must be equipped with wireless communication capabilities. NOSI takes on the role of a controller robot, sending messages to its partner, ROSI, the responder robot. NOSI’s key responsibility should be to enhance security by detecting drugs and invasive species and promptly alerting security personnel of any potential threats. On the other hand, ROSI should be tasked with surveying the crowd for persons of interest and must be equipped with GPS tracking for precise navigation. Both robots should be equipped with practical features such as flashing name tags for easy identification, obstacle detection and alert mechanisms, path-following capabilities, and passenger assistance functionalities.
To meet the project’s requirements, certain constraints must be considered. The robots are to be built using off-the-shelf microcontrollers, ensuring optimization of their performance within specific motor and sensor ranges. Rigorous testing on a model testbed will be indispensable to validate their capabilities under simulated conditions. Furthermore, effective cost management is critical to ensure that the combined expenses of both robot prototypes remain within the designated budget of 600 dollars.
Materials and software tools
Figure 1 tabulates the function, software, hardware, and microcontroller that were used for NOSI and ROSI.
System architecture
Figure 2 illustrates the system architecture of NOSI and ROSI, encompassing their structure, behavior, features, and components. This architecture is organized into three distinct layers.
At the bottom-most layer, we find an array of software tools and hardware components that form the foundation of NOSI and ROSI. This includes an ensemble of 6 sensors, 8 microcontrollers, and over 34 hardware components. The seamless integration of these cutting-edge technologies enables NOSI and ROSI to efficiently execute coordinated tasks with exceptional performance.
NOSI and ROSI building blocks.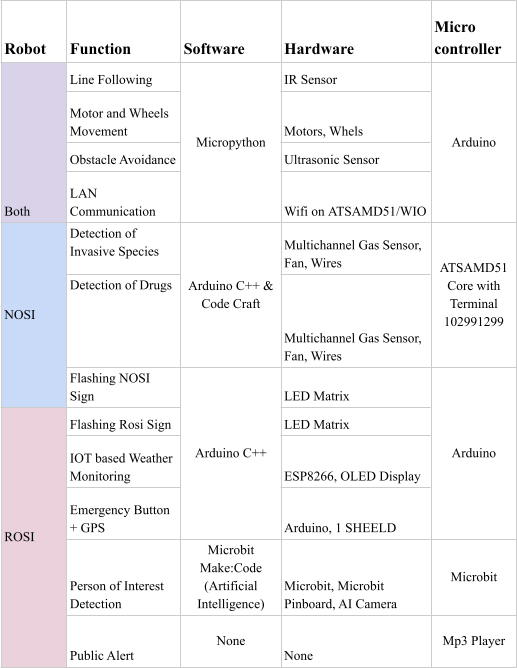
The intermediate layer showcases the core functionalities and operational processes of NOSI and ROSI. These intelligent systems have been designed to handle a diverse range of tasks with precision and adaptability. The interaction between the components within this layer enables seamless communication and coordination, empowering NOSI and ROSI to excel in various operational scenarios.
Finally, the topmost layer is dedicated to security personnel. NOSI and ROSI are equipped with a sophisticated alert system that promptly notifies security personnel of any potential threats or anomalies. This enables the security personnel to execute adaptive tasks, such as effective decision-making and timely intervention, thereby enhancing the overall security of airports.
System architecture.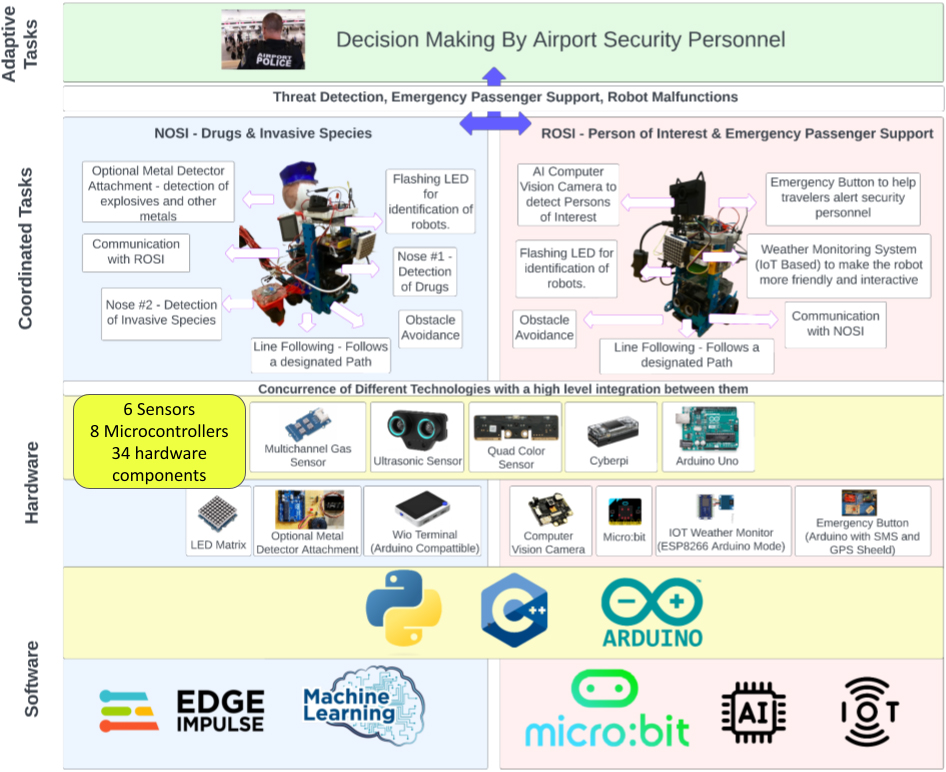
An essential feature of NOSI (Novel Odor Sensing Intelligence) is its proficiency in detecting and identifying drugs and invasive species. This detection process is accomplished through two distinct methods: 1) utilizing a machine learning model and 2) employing a threshold-based approach.
The heart of the system comprises the Seeed Studio Wio Terminal and a Groove Multichannel Gas Sensor, which together enable NOSI to accurately identify drugs and invasive species. The software aspect is powered by the Arduino IDE, enabling efficient control and data processing.
A custom CAD enclosure has been meticulously designed to house the gas sensor effectively. This enclosure incorporates a 5V fan strategically placed to facilitate the vacuuming out of odors during operations, enhancing the system’s accuracy and reducing contamination risks. See Fig. 3.
Custom Gas Sensor Enclosure: designed to suck in odor for better detection and identification of drugs and invasive species.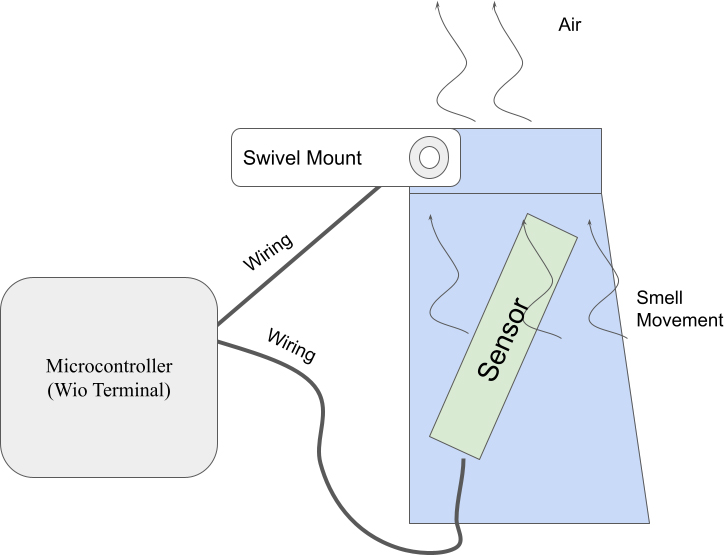
Method 1 – Utilizing a Machine Learning Model: Method 1 employs a Machine Learning Model through the CodeCraft platform for the detection of drugs and invasive species. Initially, the necessary connections are established between sensors and components, including the Wio Terminal and Gas Sensor, to enable Tiny ML. A pre-existing ML code template is then adapted and uploaded to the Wio Terminal Board via USB. To facilitate effective model training, a dataset of 300 drug samples is collected using the multichannel gas sensor.
Method 2 – Employing a threshold-based approach: Unit testing involved the gas sensor’s evaluation using simulated drugs “Alcohol” and invasive species “Lemon Vinegar.” This process facilitated the calculation of the percentage increase in parts per million (PPM) and the establishment of a threshold for detecting PPM changes. See Figs 4 and 5. Subsequently, the obtained data was integrated into the gas detection code to identify the most prevalent gases in each liquid.
The gas sensor utilized in this testing can detect four gas types: Carbon monoxide (CO), Nitrogen dioxide (NO2), Ethyl alcohol (C2H5CH), and Volatile Organic Compounds (VOC). Placing a simulated invasive species or drug under the gas sensor resulted in increased PPM levels for these gases. Based on the baseline value and the PPM value, the percentage of increase between the baseline value and the PPM value when invasive species (simulated by lemon vinegar) and drugs (simulated by alcohol) were calculated and introduced in the code.
Through this process, a threshold of increase was determined. By identifying the gas that showed the most substantial increase from its baseline to when an item was placed under the sensor, this specific gas was prioritized in the code. When the gas sensor detected a drug or invasive species, the code verified if the detected substance met the threshold requirements, allowing for precise identification.
This approach had a significantly higher accuracy rate in identifying different substances based on their unique multichannel gas-sensor readings.
NO2 has the greatest (196 percent increase) used in code to detect lemon vinegar (invasive species).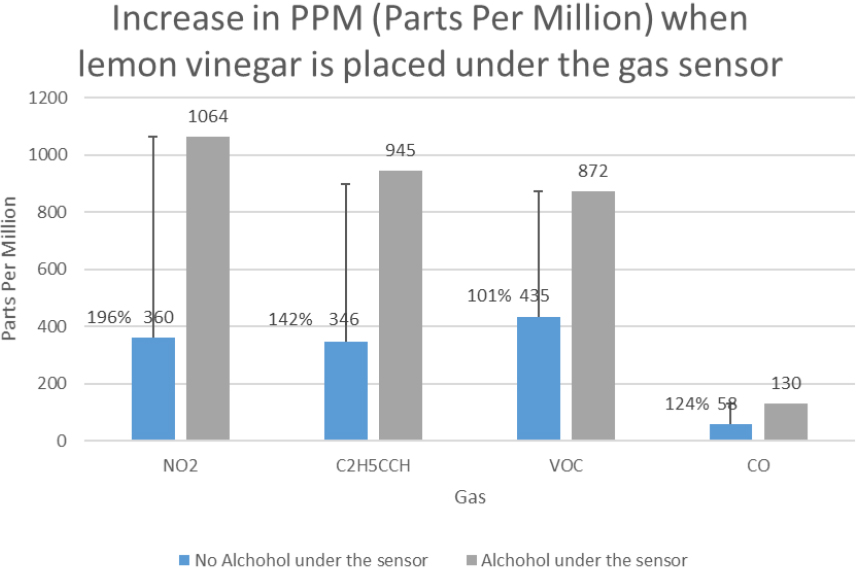
CO has the greatest (949 percent increase) used in code to detect alcohol (drugs).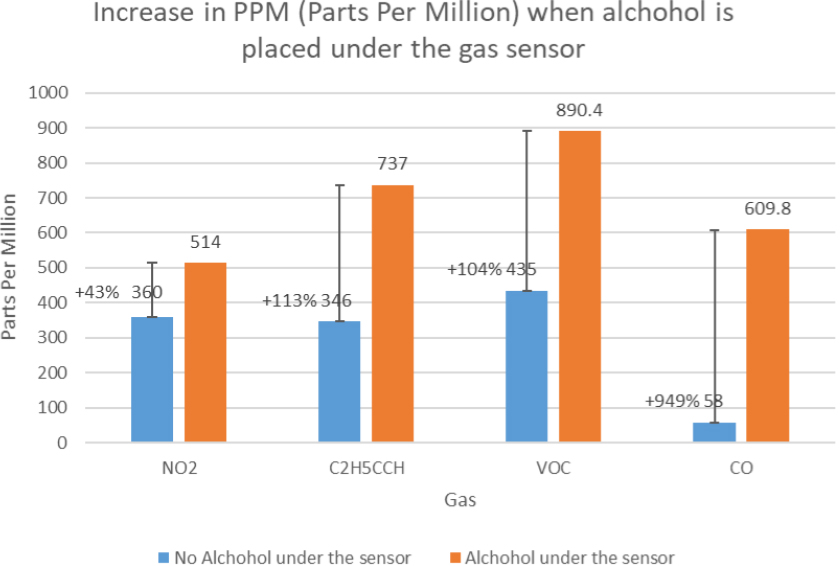
One of the most important features of ROSI (Reconnaissance Operations Security Intelligence) is its capability to identify persons of interest. The core system consists of the Husky Lens, Micro:bit, and Sensor Bit components, which work together to recognize persons of interest. Micro:bit IDE powers the software, and the Husky Lens has a built-in machine-learning model that can be trained to identify up to five faces or objects for proof of concept.
Local area network communication
LAN (Local Area Network) communication is a fundamental aspect of the seamless interaction between NOSI and ROSI. Both systems utilize LAN to establish a robust and efficient means of communication, enabling them to exchange vital signals and data seamlessly.
With the LAN integration, NOSI and ROSI can establish a direct and secure connection within a confined geographical area. This communication protocol allows them to share real-time information, coordinate their activities, and collaborate effectively. By sending signals through LAN, these advanced systems can relay critical updates, ensuring rapid response times and heightened performance, thus enhancing their coordination and effectiveness in reconnaissance and security operations.
LAN communication is seamlessly facilitated through the Cyberpi microcontroller and leverages the user-friendly Makeblock IDE (Integrated Development Environment) software tool for efficient data exchange.
Passenger assistance features
Firstly, a crucial safety measure is the emergency button integrated with GPS functionality. When activated, it instantly sends an SMS to security personnel, providing GPS coordinates for swift response to any emergency situations. This essential component is built using 1sheeld and Arduino Uno hardware, with the Arduino IDE serving as the software tool.
Secondly, ROSI offers an IoT Display that can be personalized to display real-time flight information, aiding passengers in locating their way effectively. By utilizing local weather data, the display helps passengers stay informed and navigate their journeys seamlessly. The hardware configuration for this feature includes an OLED Display, Arduino Nano, and ESP8266. Arduino IDE is the software tool.
Features present in both NOSI and ROSI
Both NOSI and ROSI share common features, including obstacle avoidance capabilities enabled by ultrasonic sensors and the Cyberpi microcontroller. When encountering an obstacle, both robots emit a beep, notify their partner robot, and alert existing security personnel while evading the obstacle.
Additionally, both NOSI and ROSI possess line-following capabilities. This functionality allows the robots to follow pre-planned paths designated by airport security personnel. In the event that the robots deviate from their designated path, they initiate a rotation in place until they successfully retrace and reestablish their intended trajectory.
Moreover, both NOSI and ROSI are equipped with a Grove-RGB LED Matrix and an Arduino, along with the Arduino IDE software tool. This LED Matrix facilitates easy identification for the robots and serves as a name tag.
Systems assembly
NOSI and ROSI were carefully assembled, featuring a blue aluminum alloy chassis complemented by custom 3D-printed parts. The initial 3D-printed component took the form of a police officer’s head, which was affixed onto NOSI. The subsequent piece bore a resemblance to a K-9’s head and was mounted onto ROSI, symbolically accentuating the profound connection between a law enforcement officer and their K9 counterpart. The base chassis was chosen as the starting point, and essential components such as sensors, servos, cameras, and microcontrollers were strategically integrated, ensuring optimal placement.
NOSI CAD model used for final hardware mapping.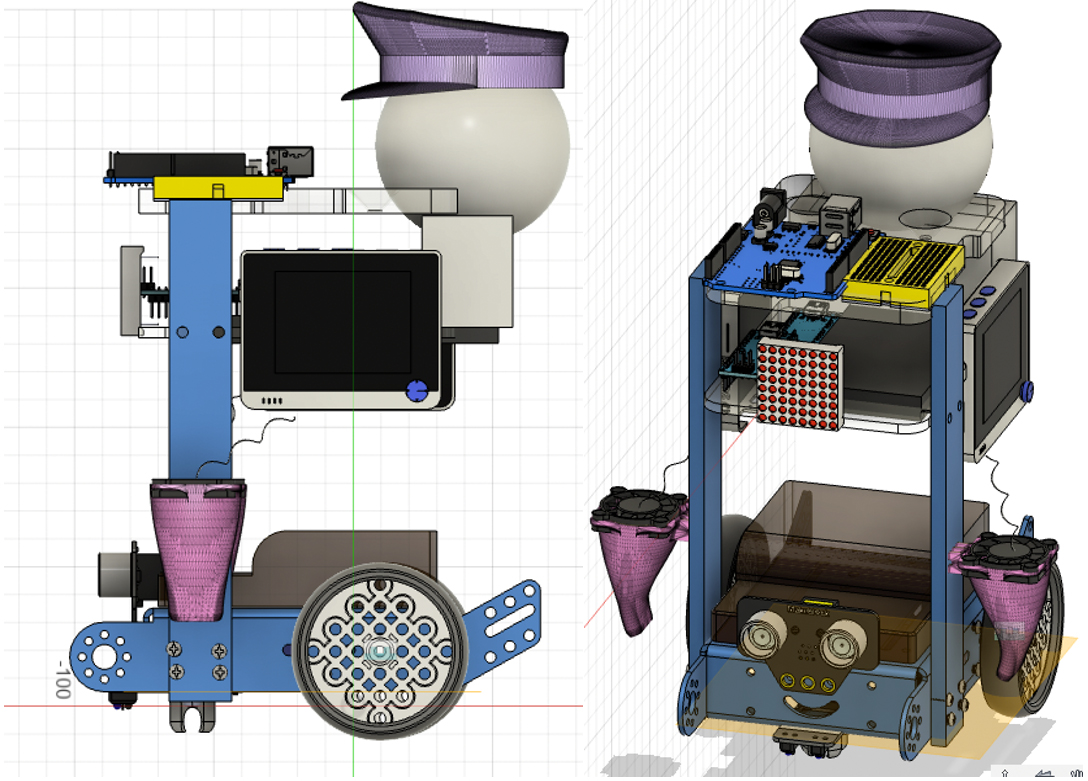
ROSI CAD model used for final hardware mapping.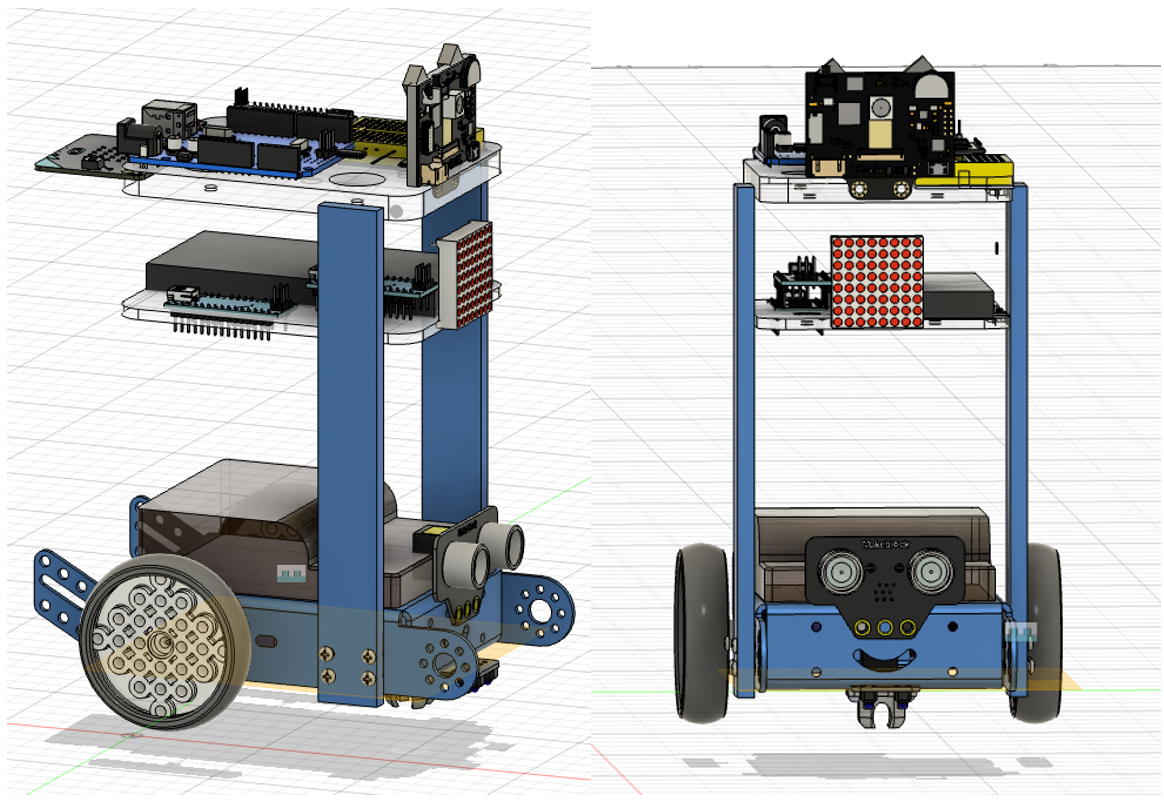
To determine the optimal arrangement of components and features for NOSI and ROSI, the design process utilized CAD models created using the Fusion 360 design platform. Figures 6 and 7 illustrates the final CAD model, depicting the configuration of both robots. The base of these robots is supported by the robust aluminum chassis of a Mbot, providing a sturdy foundation. The internal structure of the robot encompasses multiple levels to accommodate the microcontrollers, noses, cameras, and various sensors and hardware components.
At the bottom-most level of both NOSI and ROSI, the essential components for LAN communication, line following, and obstacle avoidance are housed, including the Cyberpi, color sensor, and ultrasonic sensor. Additionally, the noses responsible for detecting drugs and invasive species are positioned on this layer.
For NOSI, the second layer incorporates the Flashing LED Matrix and the Wio Terminal, which serves as the microcontroller for drug and invasive species detection. The third layer features a 3D-printed head, contributing to weight balance and visually symbolizing the symbiotic relationship between K-9 and humans.
In the case of ROSI, the second layer accommodates a Flashing LED Matrix and an IoT Display. The third layer comprises the camera, micro:bit, and sensor:bit, along with the emergency button, Arduino Uno, and 1sheeld for a person of interest detection and offering passengers emergency support. Figure 8 illustrates the component mapping of both robots.
Notably, a variety of microcontrollers are employed to handle the anticipated strain that a standard off-the-shelf microcontroller may face if tasked with controlling all of NOSI and ROSI’s features simultaneously.
Component mapping on NOSI and ROSI.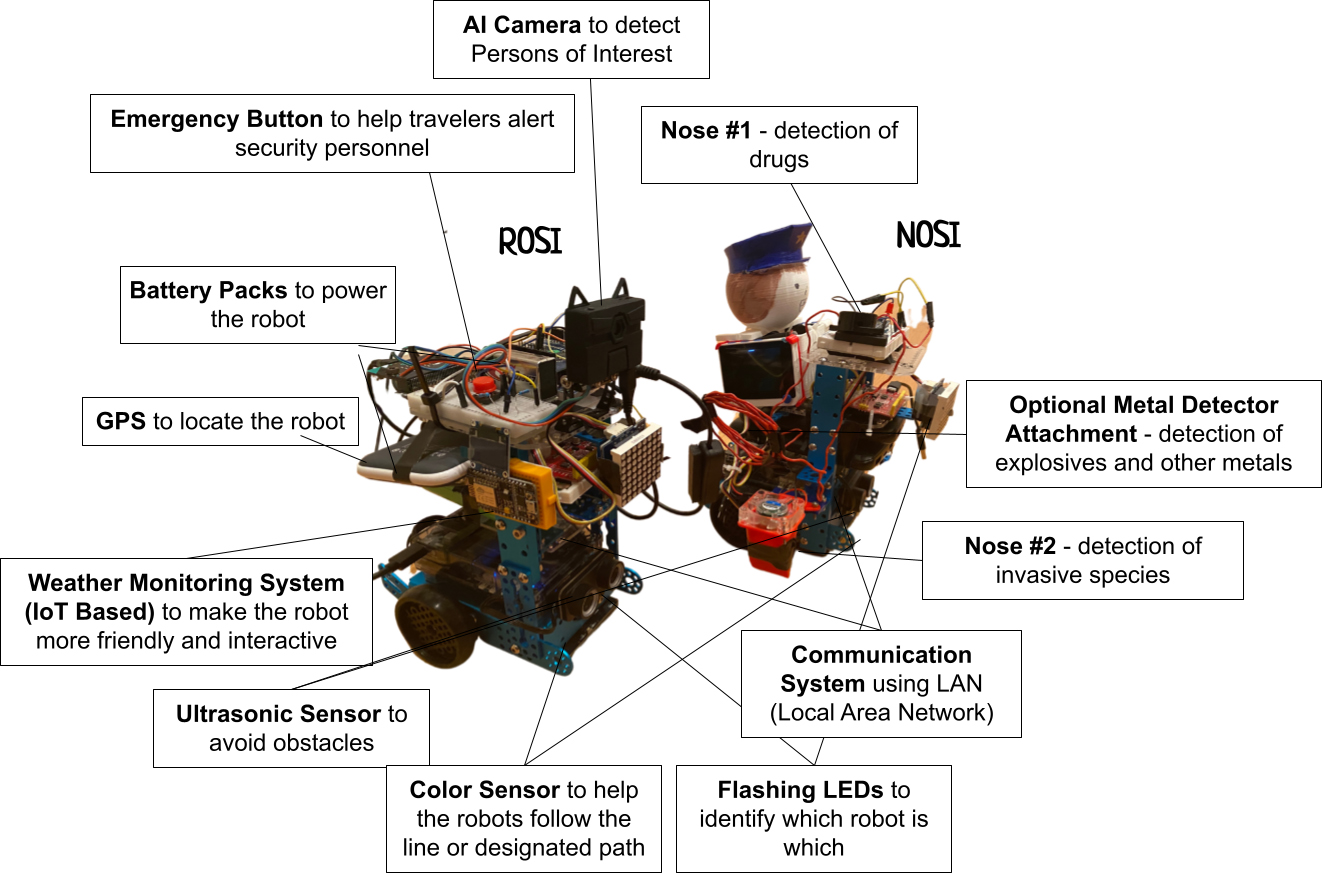
NOSI and ROSI are powered by over 500 lines of code written in C++ and Micropython. To create these intelligent robots, several software tools such as Arduino IDE, Makeblock IDE, and Make: Code were employed. Figure 9 displays the software flowchart guiding NOSI and ROSI through their tasks, ensuring seamless execution of their security functions.
Software flowchart.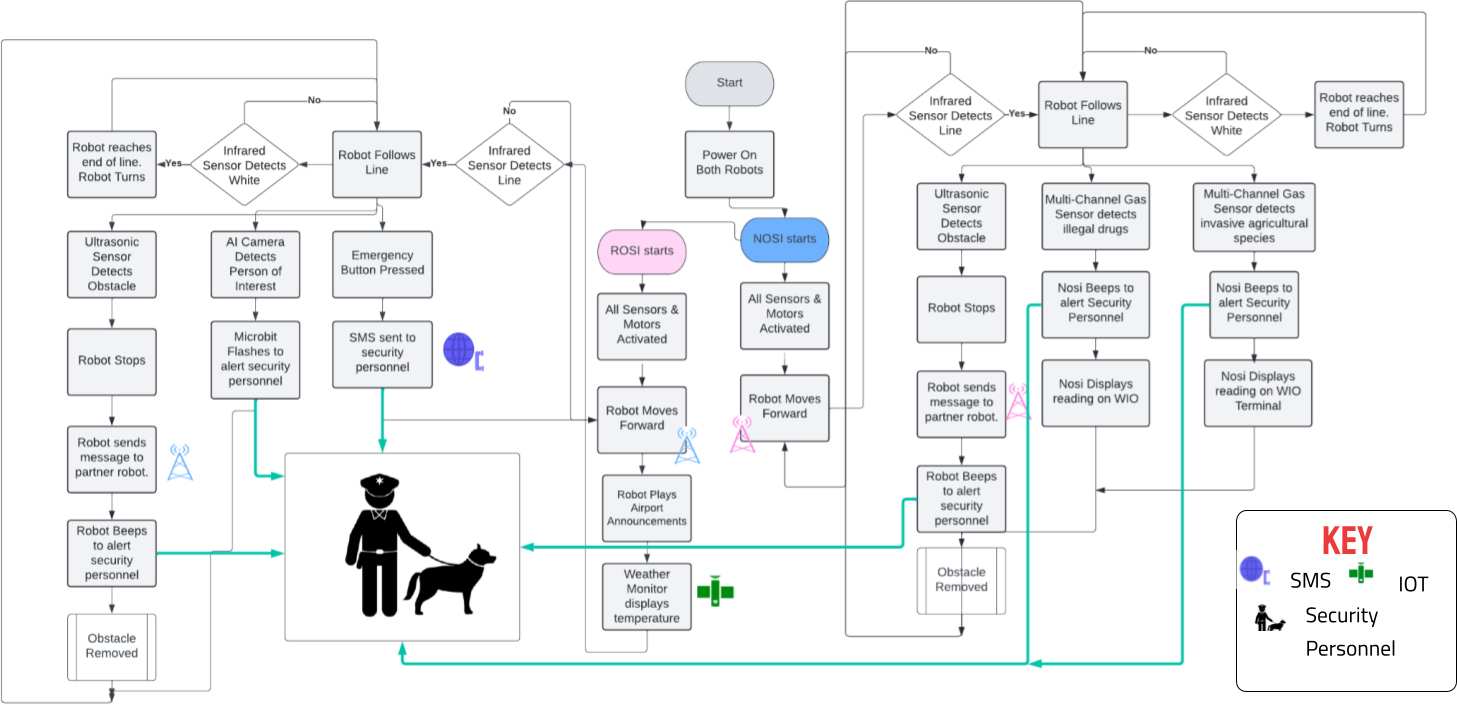
During the test procedure, NOSI and ROSI are positioned strategically in the airport environment. NOSI will operate behind the check-in counter conveyance, while ROSI will be placed in the passenger waiting line for luggage check-in. Both robots will undergo rigorous testing on a prototype testbed (See Figs 10 and 11), simulating the airport scene as shown. Each test trial will involve the robot completing one full cycle around the conveyor belt.
Diagram of testbed and location of persons of interest (POI) and drugs.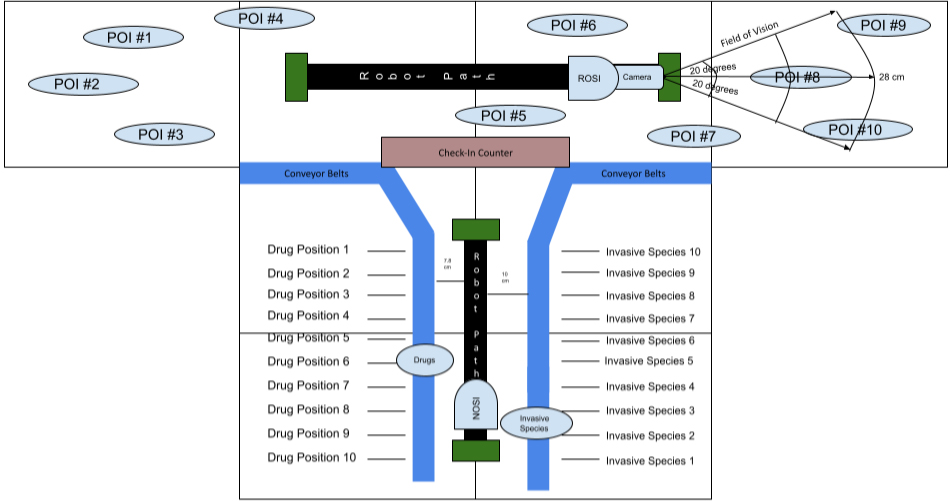
Sample data collection table
Final testbed pictures.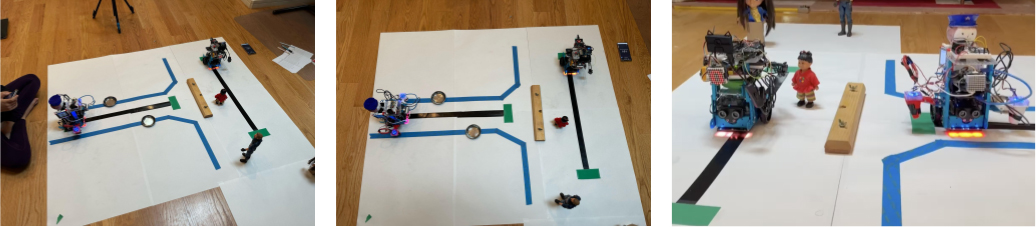
To evaluate the multi-channel gas sensor’s capabilities, the robots will be exposed to strong-smelling powder or liquid materials, such as coffee or vinegar, to simulate the presence of drugs and invasive species. Both Noses will work simultaneously to detect the respective samples on the track, ensuring accurate identification.
Obstacle detection will be assessed by introducing random objects in the robot’s path during its test cycle and evaluating its ability to navigate and avoid obstacles effectively.
The robot’s computer vision camera will be trained to identify a specific “person of interest” (represented by a doll simulating a passenger). The test will involve placing the person of interest at various locations on the test bed, along with other random persons, to verify the camera’s accuracy in correctly identifying the target.
Operations of the weather monitor and emergency button will be tested every 10 cycles to ensure they function as expected.
The robots’ line-following capabilities will be assessed by their ability to accurately follow a black duct tape representing the desired path. The blue painter’s tape will indicate the path of luggage flow from the counter to the aircraft cargo. This will facilitate the assessment of the robots’ capacity for following the designated path with precision. Any requisite modifications to the line-following configuration can then be implemented based on this evaluation.
Through these comprehensive test procedures, NOSI and ROSI will demonstrate their proficiency in carrying out security tasks, contributing to safer and more efficient operations at the airport.
NOSI and ROSI’s data will be captured using the table shown in Table 1.
NOSI and ROSI’s data analysis consisted of two approaches: inferential analysis and descriptive analysis, which were employed to determine meaningful insights and draw conclusions from the gathered data.
Inferential analysis
Confidence intervals provide plausible values for specific parameters. Calculating confidence intervals helps determine success rate ranges for certain features, leading to a better understanding of the data. In the case of NOSI and ROSI, three of their many features had confidence intervals calculated.
For ROSI’s ability to detect a Person of Interest, the true proportion of successful detections lies between 0.4221 and 0.6189 with 95 percent confidence.
Given:
Conditions:
10% condition:
Large Counts:
Confidence interval:
Regarding NOSI’s capability to detect drugs, the confidence interval of 0.06898 to 0.8473 captures the true proportion of successful detections with 95 percent confidence.
Given:
Conditions:
10% condition:
Large Counts:
Confidence interval:
Additionally, for NOSI’s ability to detect Invasive Species, the true proportion of successful detections falls between 0.7045 and 0.8655 with 95 percent confidence.
Given:
Initial success rates of NOSI and ROSI after 1st round of testing – 100 test trials.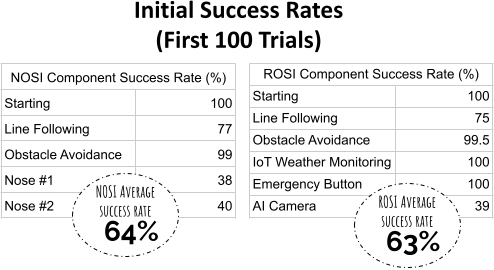
Final success rates of NOSI and ROSI after last round of testing 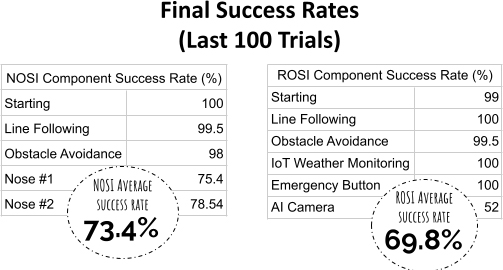
Success Rates of NOSI and ROSI over time.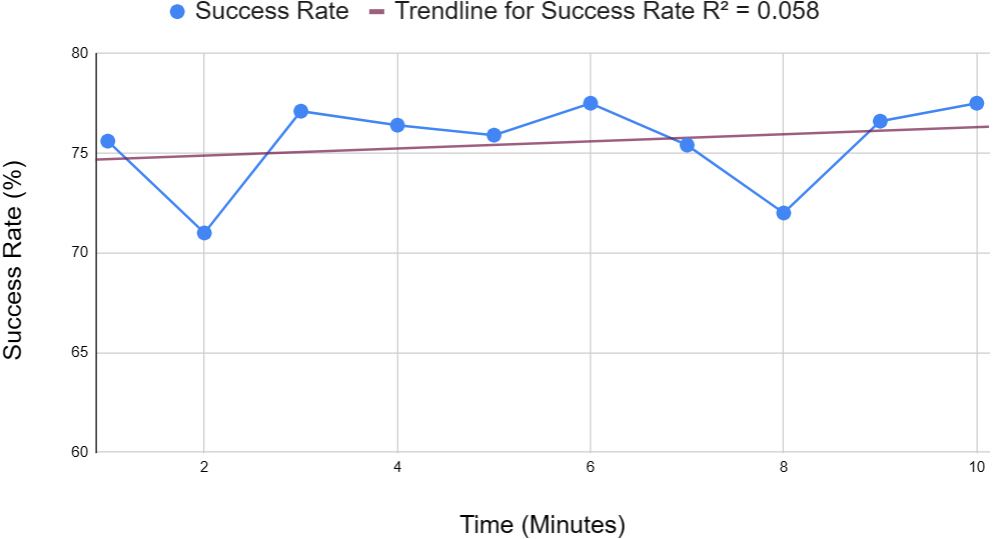
Graph on how the position of persons of interest affects success rates.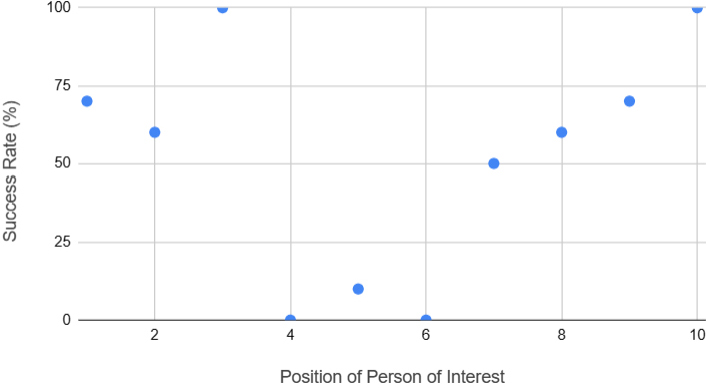
Conditions:
10% condition:
Large Counts:
Confidence interval:
These confidence intervals offer valuable insights into the performance of the features, enabling more informed decision-making and providing a clearer picture of the strengths and limitations of NOSI and ROSI’s capabilities.
To calculate the success rates, point values, and weightage were assigned to each component of the robots. NOSI Start and ROSI Start received 1/2 of a point each, while NOSI Line Following and ROSI Line Following were also allocated 1/2 of a point each. NOSI Obstacle Avoidance and ROSI Obstacle Avoidance got 1 point each. For NOSI, Nose Number 1 Detection and Nose Number 2 Detection were granted 3 points each, while ROSI POI Detection, Emergency Button, and Weather Monitoring were given 5 points, 1 point, and 1 point, respectively. The higher point values indicated the features’ greater importance.
Next, the total points from each round were added up and divided by the total possible points to get a percentage. This percentage represented the success rate for each individual robot and its specific components.
NOSI and ROSI were tested a total of 200 times with iterations between every 100 intervals. Figure 12 demonstrates the initial success rates of NOSI and ROSI after 1st round of testing (100 test trials).
To enhance the success rates of NOSI and ROSI, a series of iterative improvements were implemented. Firstly, the mounted wheels were tightened, and rubber tires were replaced to boost traction and stability, ensuring smoother movement during operations. Additionally, the weight distribution on the robot’s chassis was adjusted strategically to prevent toppling when navigating turns, thereby enhancing overall maneuverability.
A thorough unit testing phase followed, aiming to achieve better stability, particularly during right turns, which were found to be more successful. Moreover, the accuracy of the color sensor was enhanced by applying duct tape over the electrical tape, bringing the black color closer to the sensor’s detection range.
To further refine performance, the gas threshold was redefined, accounting for a slightly higher or lower range, leading to improved precision in detecting specific substances like “drugs” or “invasive species.” Additionally, efforts were made to optimize the detection capabilities of the robots, such as calculating all angles of the face, resulting in more accurate facial recognition.
Finally, both robots’ speeds were decreased by 10 percent in order to achieve sustained accuracy during their operations, ultimately contributing to a higher overall success rate. All of these iterations improved NOSI’s accuracy by 9.4 percent and ROSI’s accuracy by 6.8 percent. Figure 13 demonstrates the final success rates of both robots.
Using the success percentages, a further analysis of NOSI and ROSI’s success rates was conducted. Figure 14 shows that keeping NOSI and ROSI running for a longer duration improves their success, as the heated Metal Oxide Semiconductor senses better. Additionally, the success rate increases by 0.058 percent every 10 minutes. Figure 15 was used to determine why the success rate of POI detection is low. POI position impacts detection success only at turns (Position 4–7), causing a 50 percent decrease in success rate, as shown in the graph.
Conclusion
In conclusion, NOSI and ROSI demonstrated their effectiveness as intelligent surveillance systems, significantly contributing to airport security and enhancing the overall passenger experience. These robots excel in various aspects, such as improving monitoring performance, supporting security personnel, safeguarding against illicit and hazardous materials, and swiftly responding to potential threats. Their combined capabilities created a powerful and comprehensive security solution for airports.
Several necessary next steps have been identified to enhance the robots’ capabilities further. Upgrading to more efficient sensors will enhance their detection accuracy and range, ensuring more robust surveillance. Replacing line following with a path planning algorithm will optimize their navigation, allowing them to navigate complex environments easily. Implementing self-improvement capable of fault detection mechanisms will ensure the robots can maintain peak performance with minimal downtime.
Integrating advanced machine learning algorithms for drug and invasive species detection training will enhance their detection capabilities, making them even more effective at identifying prohibited substances. Expanding their field of vision with wider cameras will improve person detection accuracy, adding an extra layer of security. Wireless and internet connectivity will enable seamless data capture and real-time communication, improving responsiveness and processing capabilities.
With their groundbreaking fusion of multiple advanced technologies, NOSI and ROSI created an immersive and interconnected paradigm for security surveillance and operational support. The system’s customizable framework allows for tailoring to specific needs and applications, making it a forward-looking and adaptable solution. Overall, NOSI and ROSI represent a novel methodology to address the gaps in the domain of airport security, ensuring a safer and more secure travel experience for all.
Footnotes
Acknowledgments
First author is deeply grateful to the Santa Clara High School Fabrication Lab, generously sponsored by the 49ers Foundation, for providing the indispensable resources necessary to fabricate and 3D-print the components.