
Abstract
In site-specific site-response assessments, observation-based site-specific approaches requiring a target–reference recording pair or a regional recording network cannot be implemented at many sites of interest. Thus, various estimation techniques have to be used. How effective are these techniques in predicting site-specific site responses (average over many earthquakes)? To address this question, we conduct a systematic comparison using a large data set which consists of detailed site metadata and Fourier outcrop linear site responses based on observations at 1725 K-NET and KiK-net sites. We first develop machine learning (i.e. random forest (RF)) amplification models on a training data set (1580 sites). Then we test and compare their predictive powers at 145 independent testing sites with that of the one-dimensional (1D) ground response analysis (GRA). The standard deviation of residuals between observations and predictions, that is, between-site (site-to-site or inter-site) variability, is used as the benchmark. Results show that the machine learning model using a few predictor variables, surface roughness, peak frequency fP, HV, VS30, and depth Z2.5 achieves better performance than the physics-based modeling (GRA) using detailed 1D velocity profiles. This implies that machine learning can be more effective in using existing site information than 1D GRA which is inflicted by a high level of parametric and modeling uncertainties. This finding warrants the further exploration of machine learning in site effect characterization, especially on model transferability across different regions.
Introduction
“Site effects,” also referred to as “site response” or simply “site amplification,” is a general term describing the modifications of surface geology to seismic waves propagating through it (e.g. Kawase, 2021). Site effects are a multitude of wave propagation phenomena related to impedance (the product of wave velocity and density) contrasts, resonances, soil nonlinearity, and surface and subsurface topographies (e.g. Bard, 2021).
Site response has a significant impact on ground motions, and thus, it is imperative to quantify site effects in seismic hazard and risk assessments. Currently, there exist various empirical approaches to isolate site response from earthquake recordings, and results from these techniques have a relatively low epistemic uncertainty and thus are often used as “benchmark” or “ground-truth” data. These methods generally require a target–reference recording pair or a recording network:
If simultaneous recordings at a reference station (either downhole or outcrop rock) near the site of interest are available, the surface-to-borehole spectral ratio (SBSR) or standard spectral ratio (SSR) (e.g. Borcherdt, 1970) methods are applicable. However, it is not an easy task to identify a proper reference station free of amplification of its own (e.g. Steidl et al., 1996).
In addition, if multiple stations (e.g. a strong-motion network) recorded many different events, site responses at recording stations within the network can be quantified using the general inversion technique (GIT, Andrews, 1986) or through residual analysis to predictions from a ground motion model (GMM), that is, site term δS2Ss (e.g. Kotha et al., 2018; Loviknes et al., 2021). For GMM residual analyses, recorded events need to be within the applicable range of the GMM (e.g. magnitude, distance, and site conditions). Thus, rarely are GIT and δS2Ss directly applicable at a site of interest, especially in low-to-moderate seismicity regions.
Often target sites do not satisfy the requirements for applying these above recording pair- or network-based techniques (i.e. SBSR, SSR, δS2Ss, or GIT); thus, site responses have to be quantified using various estimation approaches which map available information (input) to site response (output). The “bridge” and input could be the following:
Regression-based parametric models based on a single or a combination of a few simple predictor variable(s), for example, average shear (SH)-wave velocity in the topmost 30 m, VS30 (Borcherdt, 1994), site resonant frequency (e.g. Pitilakis et al., 2004; Zhao et al., 2006), or both (e.g. Luzi et al., 2011; Zhu et al., 2020b);
Physics-based modeling, that is, ground response analysis (GRA) (e.g. Aki and Richards, 1980), or analytical approximation, that is, the square-root-impedance (SRI) method which is also called the quarter-wavelength (QWL) approach (Joyner et al., 1981), based on a detailed one-dimensional (1D) site model (e.g. velocity and damping profiles);
Machine learning (ML)-based predictive models using several explanatory variables (e.g. Bergamo et al., 2021; Derras et al., 2017; Roten and Olsen, 2021);
Empirical correction approach (c-HVSR) based on the horizontal-to-vertical spectral ratio of microtremors (mHVSR; Kawase et al., 2018) or earthquakes (eHVSR) (Ito et al., 2020; Zhu et al., 2020a); or
Geospatial techniques based on existing recording networks or background models directly or indirectly using surficial site proxies (e.g. Worden et al., 2018).
Regression models are often directly embedded into GMMs, and physics-based simulations are usually carried out in site-specific applications. In contrast, ML-based models and c-HVSR are emerging approaches. How good are these estimation techniques in capturing the mean site response at individual sites (over many events)? Addressing this question will provide a holistic view of our current practice and identify the best approach, ultimately leading to the reduction in between-site (site-to-site or inter-site) variability and more accurate ground motion predictions. Note that geospatial techniques are implemented in many mapping products, for example, ShakeMap (Worden and Wald, 2016), and they provide a good spatial coverage but their accuracy is highly dependent on the density of recording stations. Thus, in this study, geospatial methods are not compared with the approaches based on more site-specific information.
A systemic comparison of different approaches (i.e. regression and ML models, GRA, SRI, and c-HVSR) on a common homogeneous data set is instigated by the establishment of a Fourier site-response data set from recordings via GIT (Nakano et al., 2015) and an open-source site database (Zhu et al., 2021c) for thousands of K-NET and KiK-net strong-motion recording sites in Japan (National Research Institute for Earth Science and Disaster Resilience, 2019). Based on these data, Zhu et al. (2021a, referred to as the companion paper hereafter) tested and compared the effectiveness of GRA, SRI, and c-HVSR in reproducing the observed site responses at 145 testing sites chosen arbitrarily. It is revealed that comparing predictions to observations, c-HVSR could achieve a “good match” in spectral shape at ∼80%–90% of the sites, whereas GRA and SRI failed at most sites.
In this study, we use the same data set as in the companion paper (Zhu et al., 2021a) but focus on the evaluation of site-response predictive models by least-squares regressions and a supervised ML approach (i.e. RF). We develop a cluster of regression- and ML-based site-response models using different predictor variables from a training data set (1580 sites). Next, we test and compare their performance in capturing the site-specific frequency-dependent features of site responses at 145 testing sites (hidden from the model development and chosen arbitrarily). Then we juxtapose site-response models with other approaches (i.e. GRA, and c-HVSR) at the 145 sites. Finally, we discuss different types of uncertainty in site-response predictions.
Evaluation method
If multiple recordings are available at multiple sites, observed site response at a site s during earthquake e can be expressed as:

where
In GMM,
In this study, we only focus on the average site response at a given site over many events, that is,

where
We compile
Site-to-site variability (shaded area) of residual site response
Data
As detailed in the companion paper (Zhu et al., 2021a), the data set contains the Fourier Amplitude Spectra (FAS)-based linear site responses in the horizontal directions at 1725 K-NET and KiK-net sites (Figure 2) derived by Nakano et al. (2015) using the GIT. The site response at each site is the average over at least five events, that is, the repeatable site response, and is referenced to the seismological outcrop rock condition with VS = 3.45 km/s, that is, the absolute site response. Further details on ground motion selection and processing are provided in the companion paper (Zhu et al., 2021a).
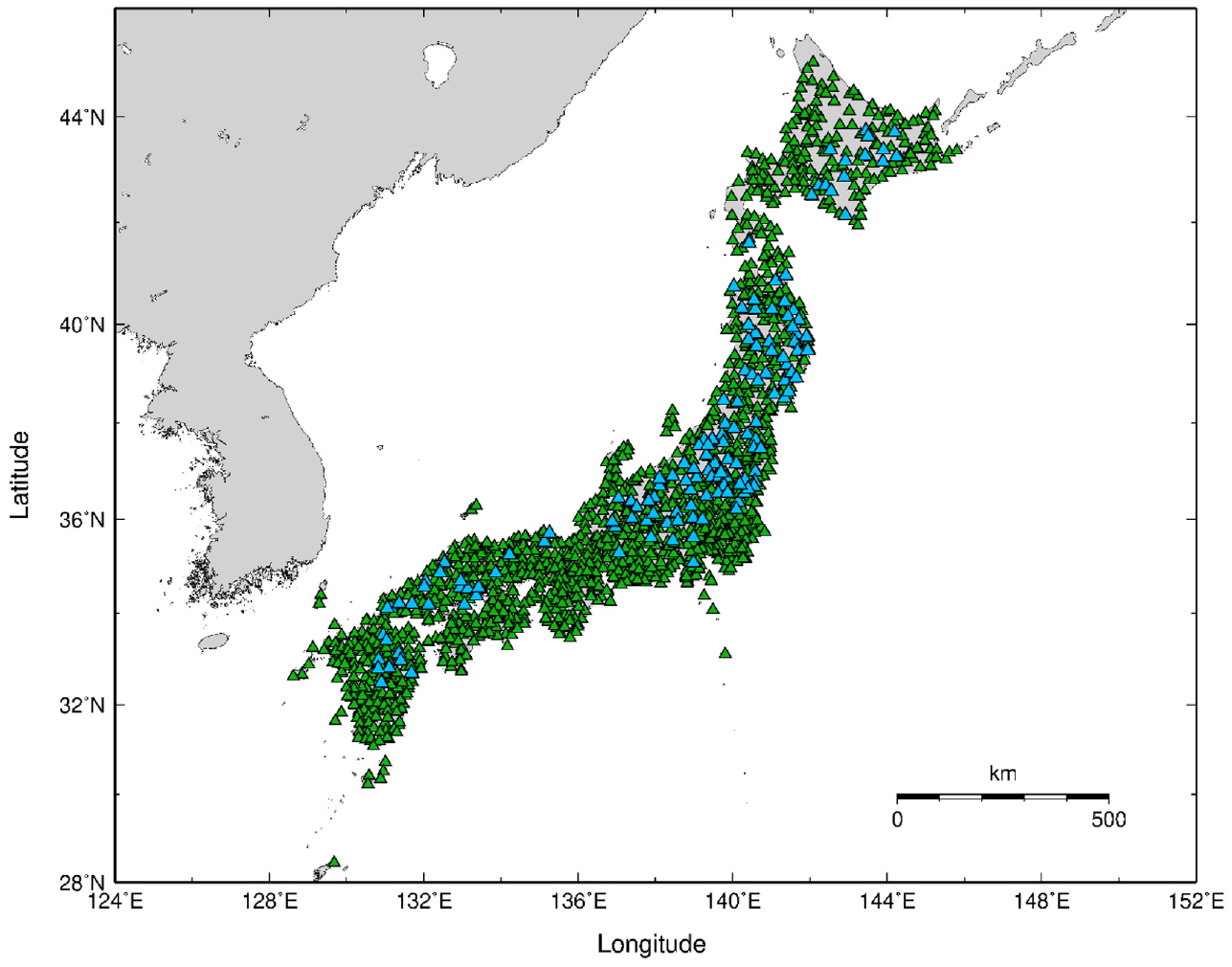
Spatial distribution of the 1725K-NET and KiK-net recording sites used in this study. Here 1580 sites (green triangles) are used for training and the remaining 145 sites (blue triangles) for testing.
From the complete data set, we arbitrarily select 145 sites for testing (Supplemental Table S1, see “Data and Resources”) and the remaining 1580 sites for training (Figure 2). The 145 testing sites are representative of the full data set in terms of spatial coverage and statistical distribution of site parameters. In the companion paper, the training sites were used to derive correction spectra for c-HVSR, whereas the testing data set was earmarked for evaluating and comparing the performance of different site-specific approaches, including c-HVSR, 1D-based GRA, and SRI methods. Likewise, in this article, we develop parametric and non-parametric site-response models on the training data and then examine and compare their effectiveness at the testing sites (Figure 3).
Percentage of reduction in between-site variability in site response ((
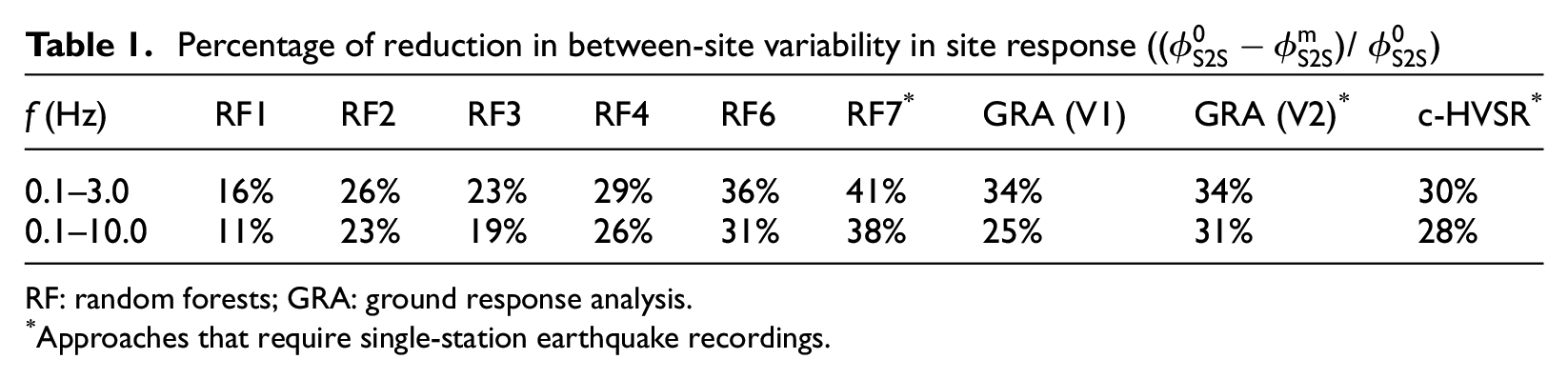
RF: random forests; GRA: ground response analysis.
Approaches that require single-station earthquake recordings.
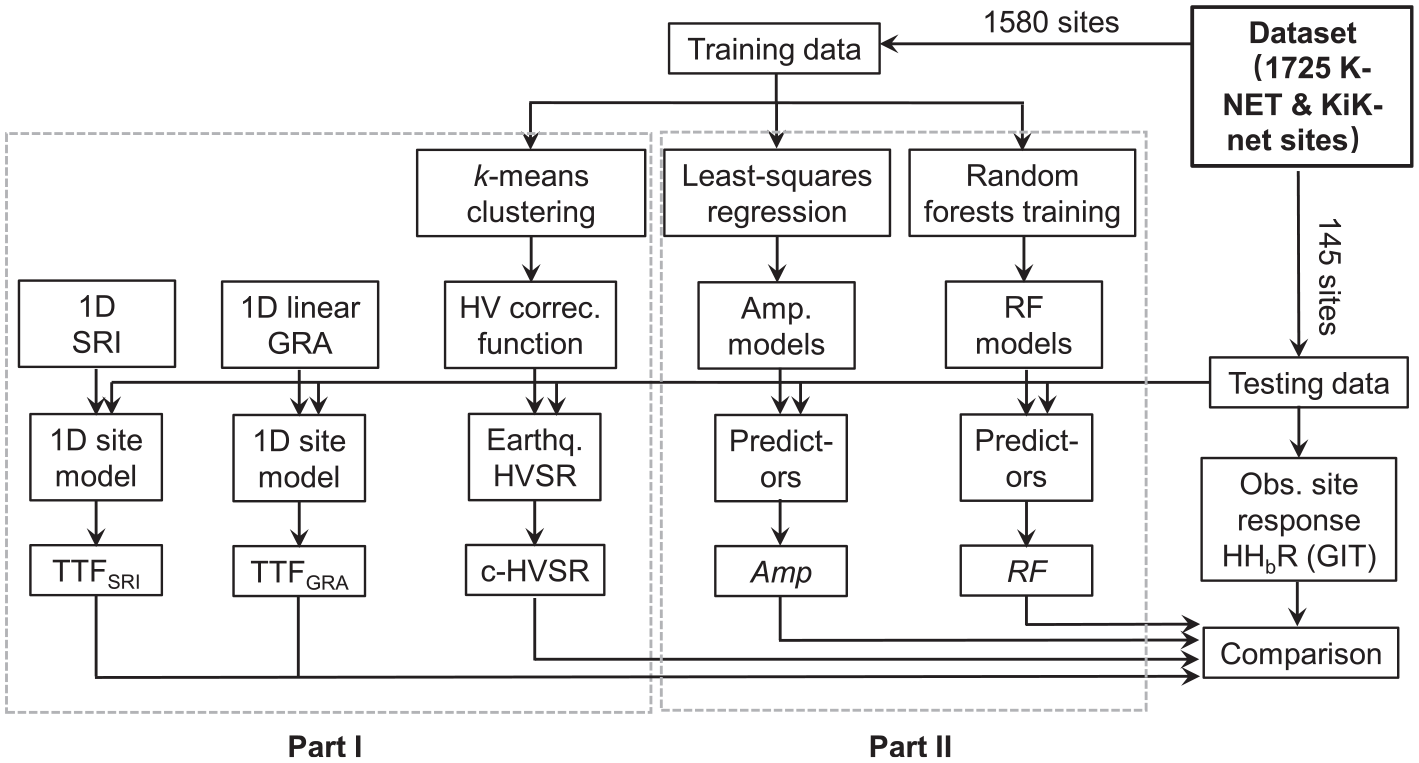
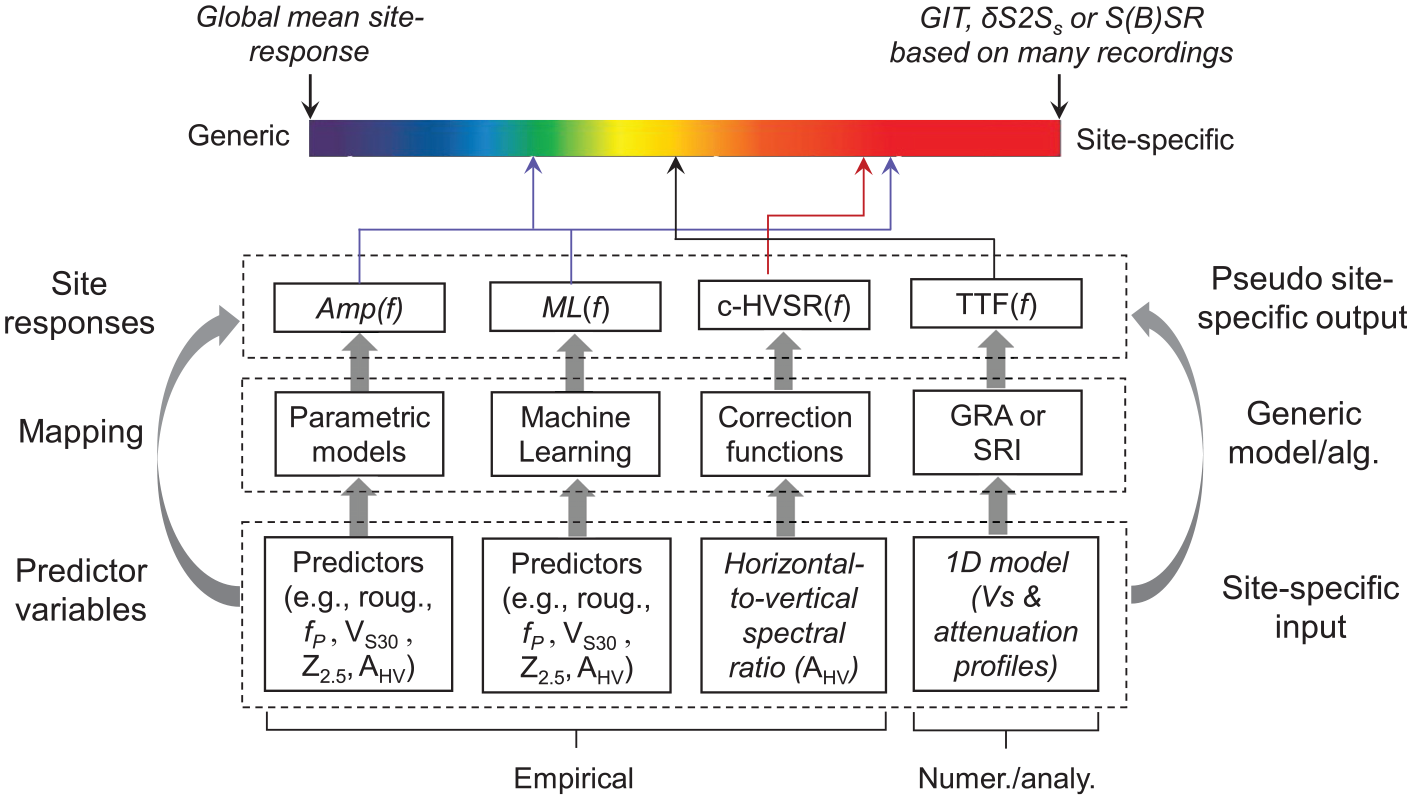
Flowchart illustrating the evaluation of different site-response estimation approaches. TTF—theoretical transfer function from either 1D ground response analysis (GRA) or the square-root-impedance (SRI, also called quarter-wavelength) method; c-HVSR—corrected HVSR; Amp—parametric site-response models by least-squares regressions; and RF—fully data-driven site-response models by random forests (a supervised ML technique) (after Zhu et al., 2021a).
Site metadata at the 1725 stations are collected from an open-source site database developed by Zhu et al. (2021c, see “Data and Resources”). Considered predictor variables include topographic roughness (Roug., the largest difference in elevation between the target pixel and the surrounding cells on a digital elevation model, DEM), geological unit (Geo.), geomorphological category (Geomorp), VS30, predominant frequency on HVSR curve (fP, HV or fp for brevity), depth to SH-wave velocity 2.5 km/s horizon from the Japan Seismic Hazard Information Station (J-SHIS) 3D velocity model (Z2.5, Fujiwara et al., 2012), the mean eHVSR curve over multiple events (AHV(f)), and the high-frequency decay parameter kappa (κ0). Although some of the site information is not typically considered as site metadata, for example, AHV(f), rather we regard them as “predictor variables” of site response in a broad sense. More information on predictors can be found in the data and companion papers (Zhu et al., 2021a, 2021c).
Model development
Site-response models are predictive models relating input information, that is, predictor variables, to output, that is, site responses at different frequencies. We develop both parametric site-response models by conventional regressions in a least-square sense, and non-parametric models by a supervised ML technique—RF. Since many prior studies in different disciplines have demonstrated the potential of ML models for improved predictive power over regression-based ones (e.g. Kong et al., 2019), herein we do not repeat the comparison between the two. Before model development, we first classify predictor variables according to their accessibility/engineering utility (Figure 4).
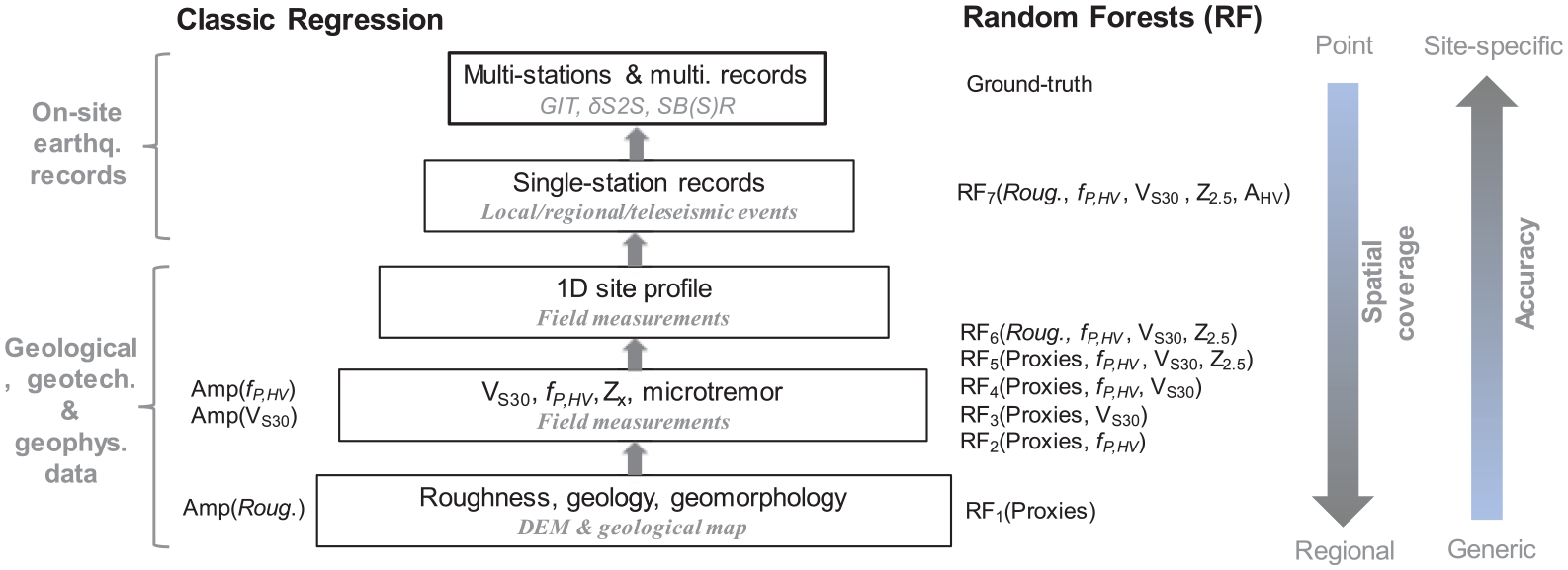
Site information pyramid according to their engineering utility. Site responses derived directly from empirical data using recording pair- or network-based techniques are used as ground truth.
Surficial proxies, including topographic roughness, geology, and geomorphology, can be readily derived from DEMs and geological maps which are available on regional or even global scales. Thus, surficial proxies are considered to be the easiest-to-obtain proxies and are often used in regional seismic hazard/risk mappings. Surficial proxies are followed by site data from on-site measurements, including VS30, fp, Z2.5, and microtremors (Figure 4). VS30 has been included in many seismic codes (e.g. Eurocode 8, 2004), and thus tremendous efforts have been devoted to deriving this parameter at many sites (e.g. Cultrera et al., 2021; Di Giulio et al., 2021). fp can also be reliably obtained from mHVSR (e.g. Site EffectS assessment using AMbient Excitations (SESAME), 2004). Z2.5 can be derived by querying regional 3D velocity models, though such velocity models only exist for a few regions. 1D site profiles can be established by invasive or non-invasive techniques.
Geological and geotechnical data, and microtremors, can be acquired in a reasonable timeframe. We thus consider them to be more accessible than single-station earthquake recordings which reply on local, regional, or teleseismic events. However, using earthquake recordings is expected to lead to a more accurate characterization of site effects. Therefore, the decision on what site data to collect for a given project needs to balance both the required level of estimation accuracy and the available resources (e.g. time and budget). To collect earthquake recordings, one may need to instrument the target sites in the planning stage of a new project. Also, we note that our grouping of site data is subjective, and the hierarchical structure of predictors (Figure 4) may vary for a specific case.
Least-squares regressions
From the training data, we develop three simple parametric models (Figure 4) by conventional least-squares regressions. Empirical data show that FAS-based site responses at different oscillator frequencies change linearly with topographic roughness (Figure 5); we thus use a linear functional form (Equation 3) to depict this relationship:

where a1 and a2 are frequency-dependent regression coefficients. Roug. represents roughness.
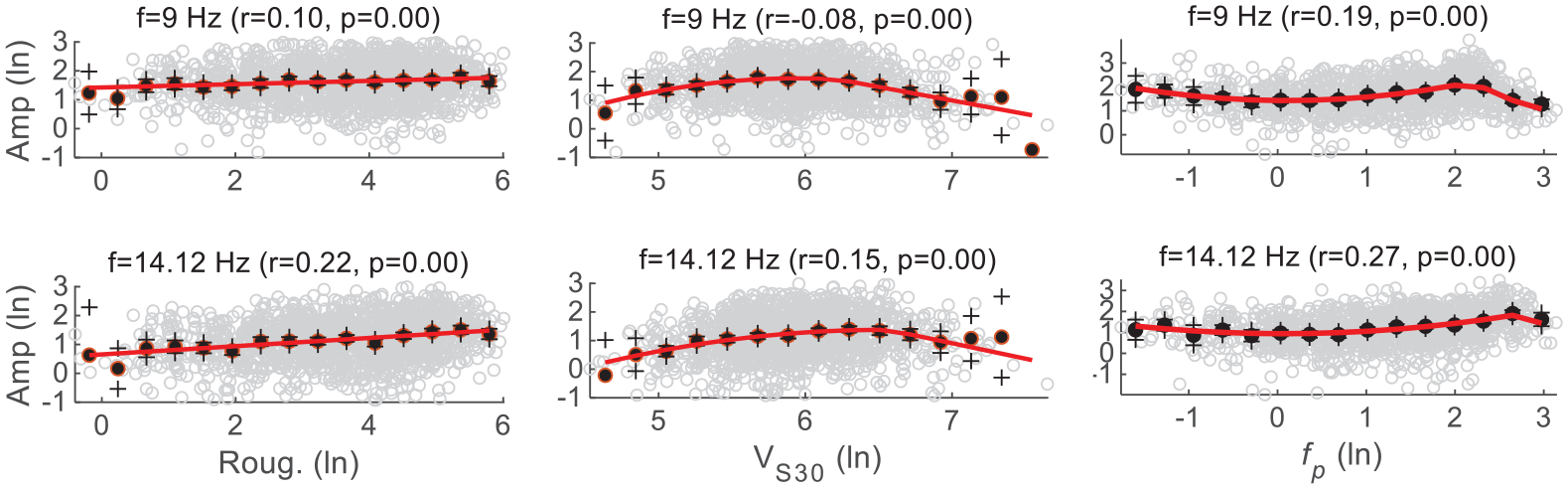
Fourier site response (ln scales) versus Roughness (left), VS30 (middle), and fp (right) at different oscillator frequencies. In each plot, each circle corresponds to one site; black dots and plus signs represent binned means and their 95% confidence intervals of the mean estimate, respectively; and the red line denotes the prediction from regression models (Equations 3–5).
However, the trend between FAS site responses and VS30 cannot be fully described by a linear function (Figure 5), as is often adopted for PSA-based site responses. Rather, we use a piece-wise function (Equation 4) to model the complex relationship. Vc and VL are breakpoints (velocities) that are derived from regressions as frequency-dependent parameters. There is no site response for VS30 above Vc; for VL ≤ VS30 < Vc, site-response scales linearly with VS30; and for VS30 < VL, there is a nonlinear relation between site response and VS30:

where b1–b3, and Vc and VL are frequency-dependent regression coefficients.
Site responses also vary nonlinearly with fp (Figure 5). Site response peaks at the oscillator frequency of interest (fosc), whereas for f < fosc and f ≥ fosc, the trends are modeled by quadratic functions:

where c1–c5 are frequency-dependent regression coefficients. All model parameters and coefficients in Equations 3–5 are solved in regressions on the training data set and are provided as Supplemental material (see “Data and Resources”). The testing data are absent during model developments.
Random forests
In addition to conventional regressions, we use an ensemble ML approach, RF, to perform multivariate non-parametric and nonlinear regressions. Data-driven approaches do not require pre-defined functional forms and can model the complex relationships embodied in data, which is an appealing feature when it comes to multivariate regressions. RF is a supervised technique and requires hand-crafted features (explainable variables). RF is adopted mainly because RF models are transparent or explainable, as opposed to many “black box” algorithms because gaining insight is as important as achieving high prediction accuracy, if not more.
The RF training algorithm (e.g. Breiman, 2001) applies the technique of bootstrap aggregating, or bagging, to tree learners (Figure 6). Bagging generates B number of bootstrap replicas of the training data set,
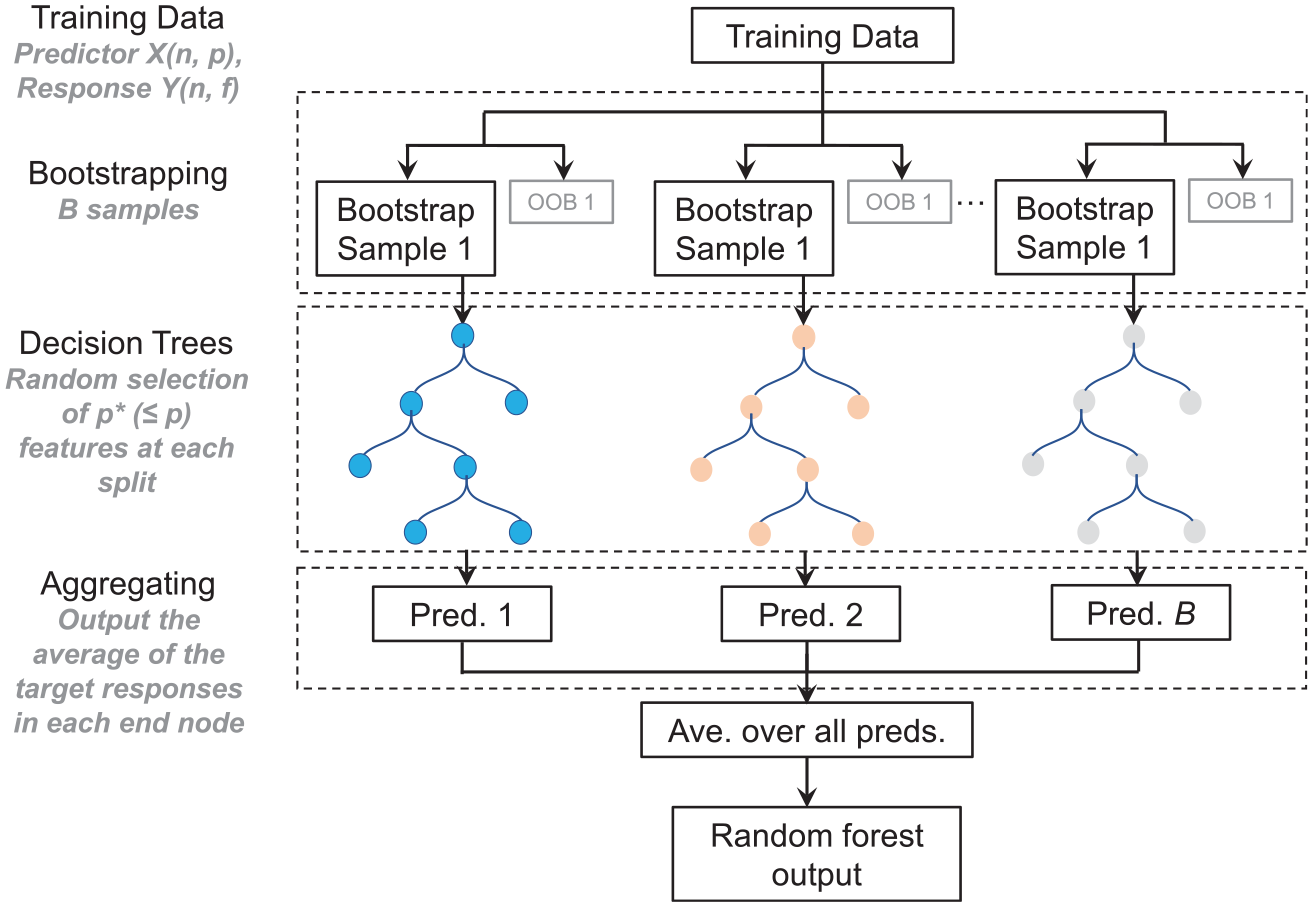
RF regression. X and Y are column matrices that contain predictor and site-response data, respectively. Each row in X and Y corresponds to one site. Each column in X represents one predictor variable, and each column in Y corresponds to the site response at a given oscillator frequency. n, p, and f are the total numbers of sites, predictor variables, and oscillator frequencies considered in this study. B is the total number of bootstrapped samples (or trees), and p* is the number of predictor variables selected at random at each decision split. OOB is the out-of-bag data.
The training data set, consisting of predictor variables
We start developing RF models using only surficial proxies and then add more predictors into the model, thus a series of RF models are trained (Figure 4). In this study, single-station earthquake recordings are simply used in the form of eHVSR, but other representations of single-station recordings can be explored in the future. Considering engineering utility, mHVSR is preferred over eHVSR, but microtremors are unavailable at most KiK-net and K-NET sites.
Model explanatory powers
Model explanatory power denotes to what degree the model explains the variability in the training data. First, we check the residuals of each model. The residuals of the RF model RF7 (Figure 7) at f = 9 and 14.12 Hz are centered at zero and have no systematic trend against their corresponding predictor variables. This is also true at the other oscillator frequencies and for other models (not shown here for brevity but provided as Supplemental material, see “Data and Resources”). These demonstrate that the trends between site responses and predictor variables in the data are successfully captured by both the regression and RF models developed here.
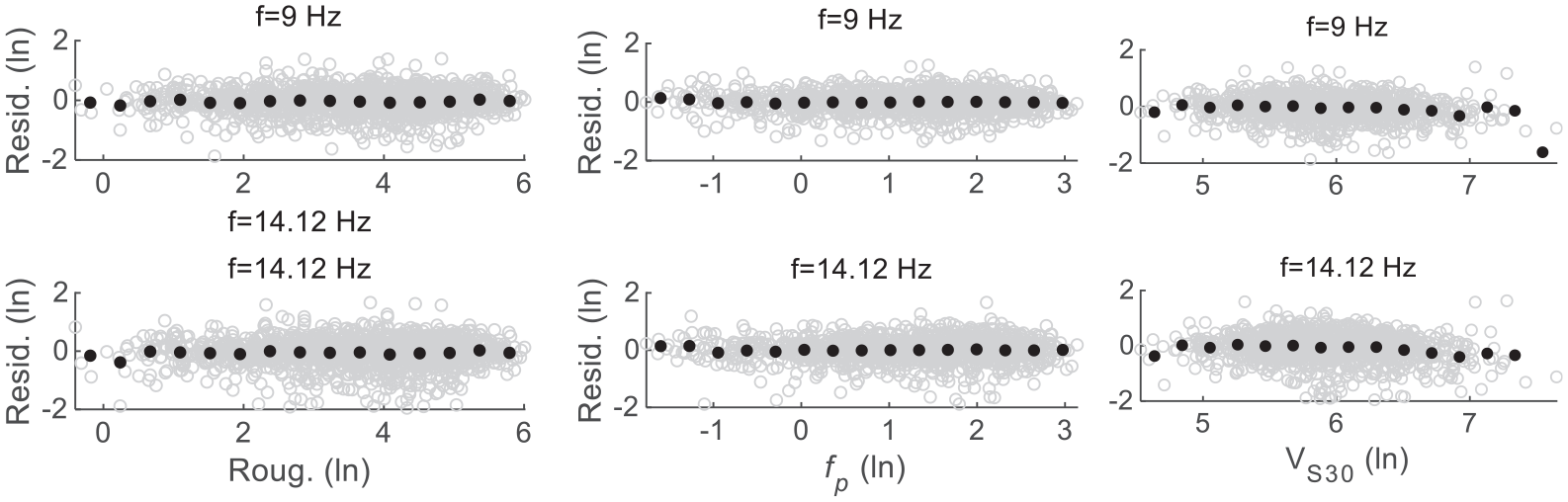
Residuals of the RF model RF7 (Figure 4) against its main predictor variables at selected frequencies. In each plot, black dots represent binned means.
Next, we assess the explanatory powers of each RF model (Figure 8) using the coefficient of determination (R2) which reflects the proportion of variance explained by each model. R2 is derived using the OOB data and represents an independent evaluation of the model explanatory powers. As expected, the model RF1 using Proxies (the combination of roughness, geology, and geomorphology) is the least effective in explaining the data variance, especially at relatively high frequencies (f > ∼3.0 Hz) where less than 10% of variance is accounted for. However, RF1 can be readily applied in site-response mapping on a regional or even global scale. With the inclusion of more and more predictors from field measurements, model explanatory powers are significantly improved. RF7 is the best-performing model which accounts for as high as 70% of the variance at f = ∼0.5–1.0 Hz. However, at higher frequencies, for example, at f = 12.15 Hz, RF7 explains only 30% of the variance. Such complex site-response models as RF7 can be used in site-specific studies. Therefore, when considering site-response models, one needs to balance its spatial coverage and estimation accuracy.
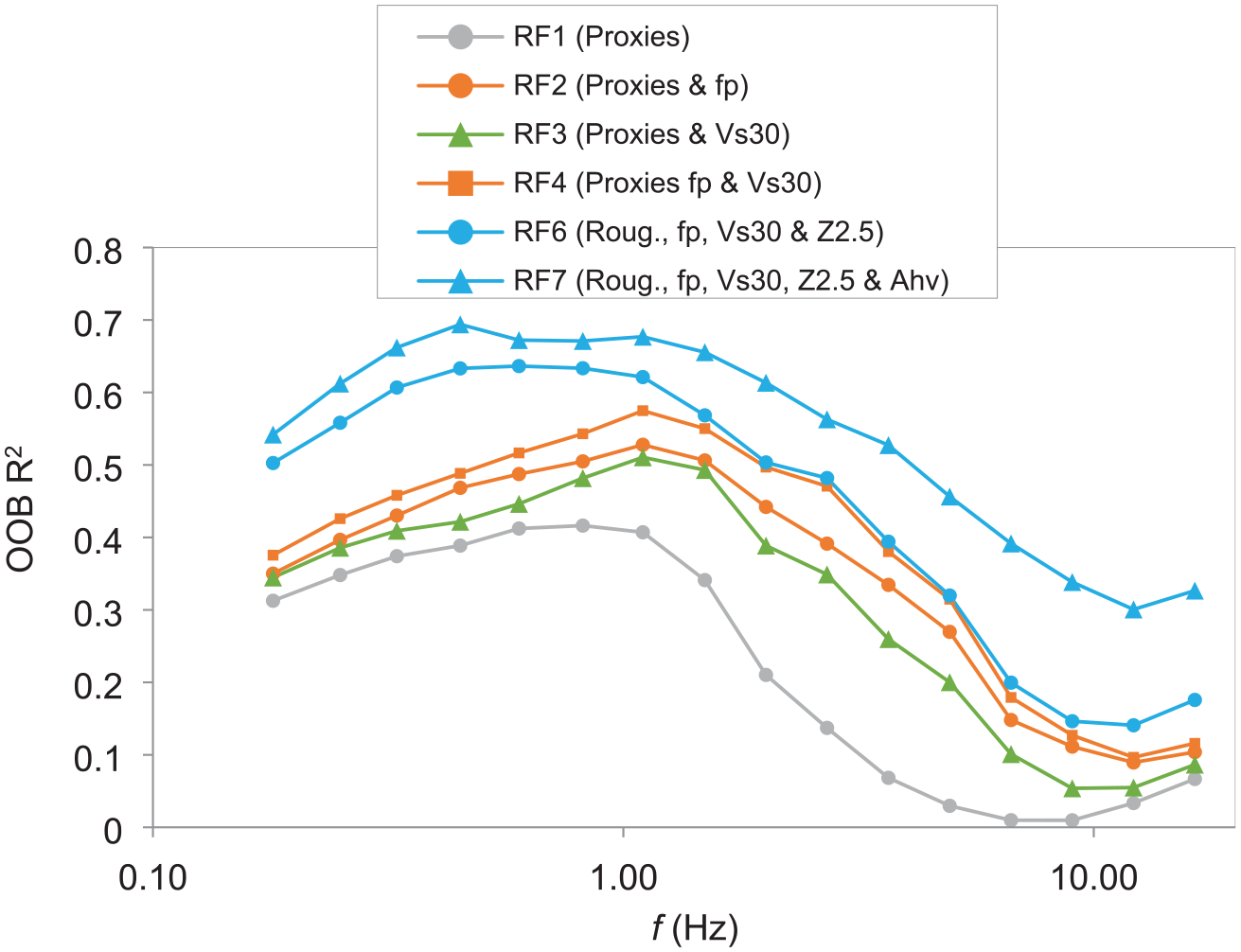
Model explanatory powers using coefficient of determination (R2). R2 is estimated using the OOB data during the training of each RF model. Proxies denote a cluster of three topographic/geological features, including topographic roughness, surface geology, and geomorphology.
We then examine the relative importance of individual predictor variables in RF models, as exemplified in Figure 9 for RF7. Results for other RF models are provided as Supplemental material (see “Data and Resources”). In RF1, Proxies (roughness, geology, and geomorphology) are effective at relatively low frequencies (<∼1.0 Hz), especially roughness. This confirms previous results (e.g. Thompson and Wald, 2016; Weatherill et al., 2020) that topographic proxies reflect the deep subsurface structures. However, when Z2.5 (inferred from the J-SHIS velocity model) is included (i.e. RF5), geology and geomorphology become insignificant. This is because, although geology, geomorphology, and Z2.5 are all indicators of deep velocity structures, Z2.5 is a continuous quantity, whereas geology and geomorphology are categorical variables. Thus, Z2.5 is a significantly more effective predictor of site responses at relatively low frequencies than the latter two. For this reason, we exclude geology and geomorphology in the subsequent models, that is, RF6 and RF7 in which Z2.5 is incorporated.
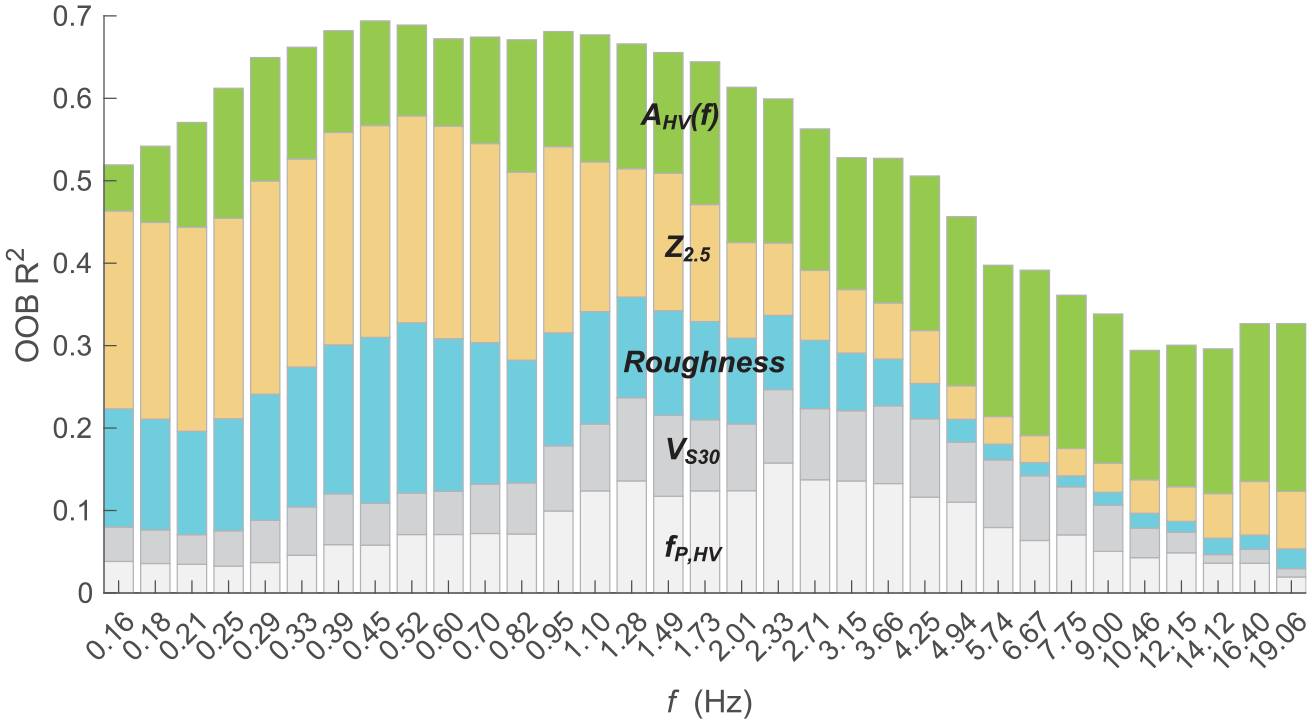
Unbiased estimates of the relative importance of predictors in the RF model RF7 using OOB data. The height of each column is scaled to represent the coefficient of determination R2 as shown in Figure 8.
Both VS30 and fp contribute to the reduction in variance in the mid-frequency range, but fp is more effective than VS30 (Figure 9). This is consistent with many previous findings, for example, by Zhu et al. (2020b) who suggested using fp as the primary and VS30 as the secondary predictor variable. Among all explanatory variables considered here, AHV(f) is the only one performing well at all examined frequencies and is also the most effective at frequencies higher than 10 Hz.
Model predictive powers at the 145 testing sites
Model explanatory power only quantifies the proportion of explained variance in the training data. However, it is the predictive power of a model, namely the ability to explain the variability in unseen data, that is relevant in seismic hazard/risk analyses (e.g. Bindi, 2017). Therefore, the evaluation of predictive models should be based on data that are unseen by the models under evaluation (e.g. Mak et al., 2017). In this section, we test the regression (Amp) and RF amplification models at the 145 testing sites which are completely “hidden” from the model development (Figure 3). For illustration purposes, predictions are compared with observation at one test site FKSH05 in Figure 10, while results for all other sites are provided as Supplemental material (see “Data and Resources”).
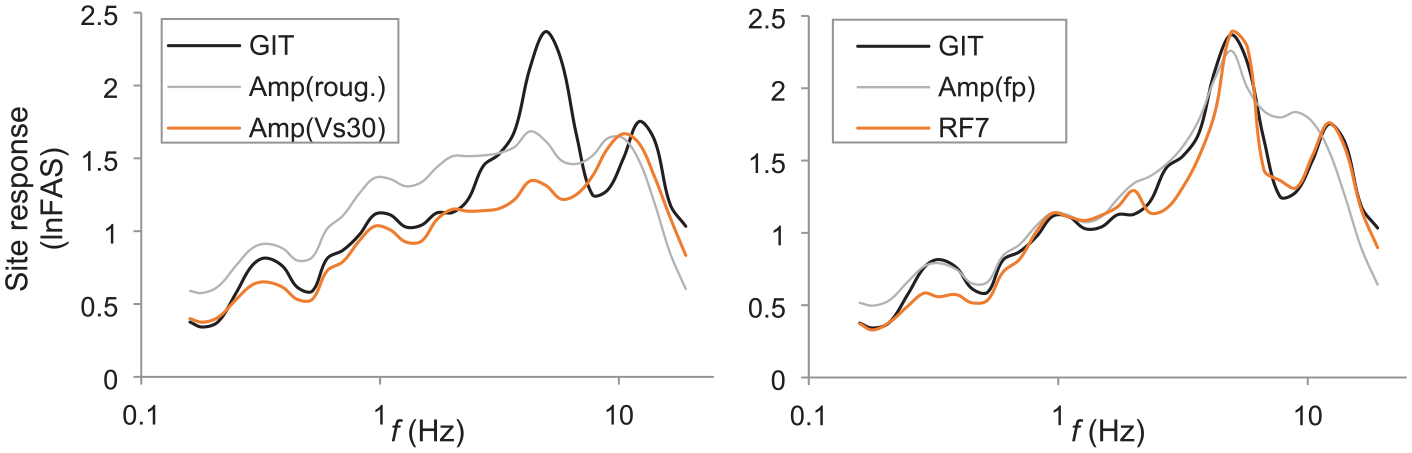
Observed (from GIT) versus predicted site responses at the test site FKSH05 using Amp(Roug.), Amp(VS30), Amp(fp), and RF7. GIT site response is the same in both plots. lnFAS represents results based on Fourier domain in ln scales.
As shown in Figure 10, RF7 and Amp(fp) estimates match the observation well and can capture the resonance at f = 4.9 Hz due to the inclusion of fp in both models. In contrast, predictions from Amp(Roug.) and Amp(VS30) significantly underestimate the resonance. The distributions of residuals at the 145 testing sites (Figure 11) demonstrate that Amp(VS30), Amp(fp), and RF7 are not biased. This is also true for Amp(Roug.) and other RF models (see “Data and Resources”).
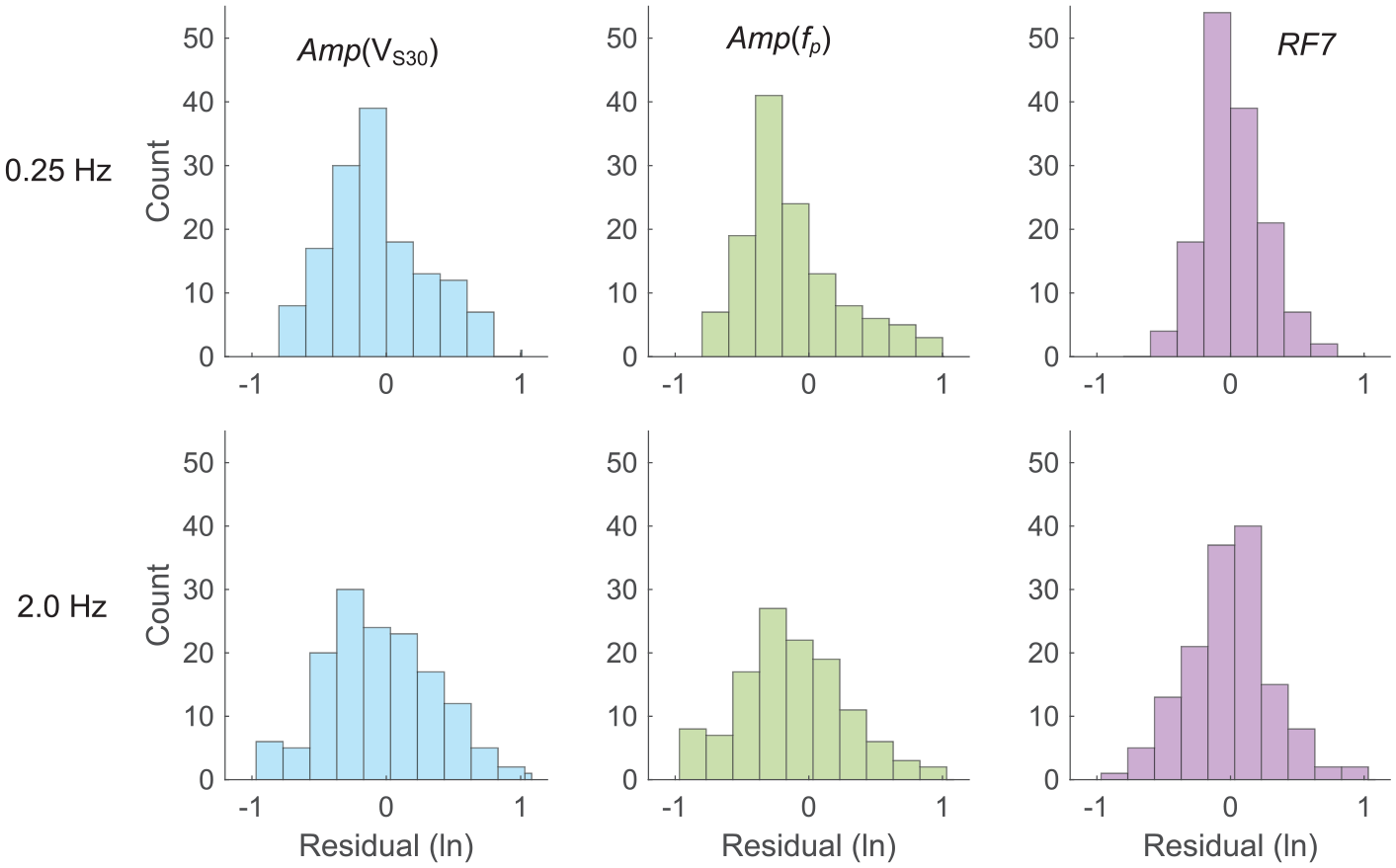
Histograms of residuals between site-response observation and predictions from the parametric models Amp(VS30), Amp(fp), and RF model RF7 at f = 0.25 Hz (first row) and 2.0 Hz (second row) at the 145 testing sites.
Then we assess to what extent each estimation model/approach can capture the site-specific features of site responses at the 145 testing sites as a whole (Figure 12). This is achieved using the reduction of
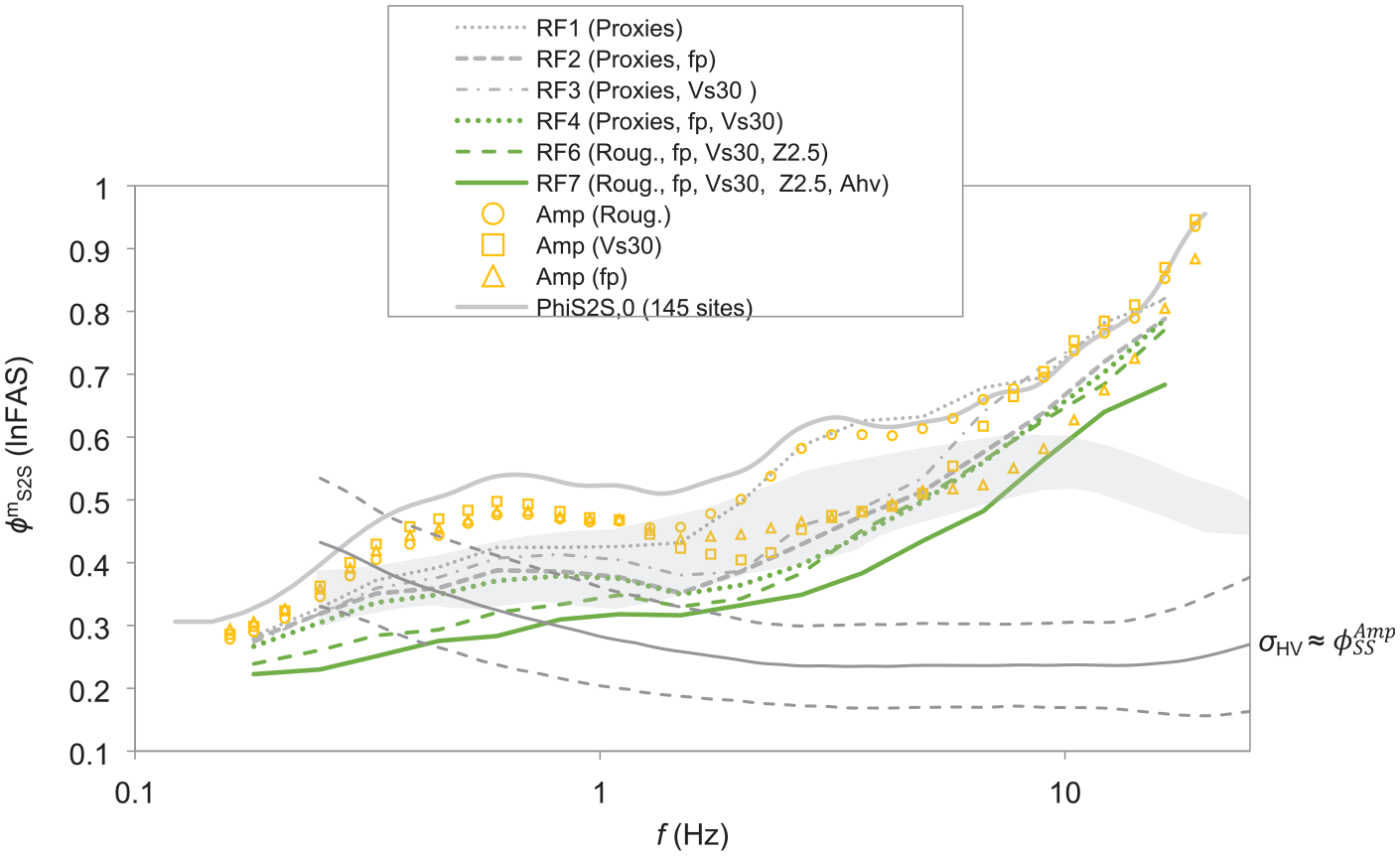
Comparison of between-site variability
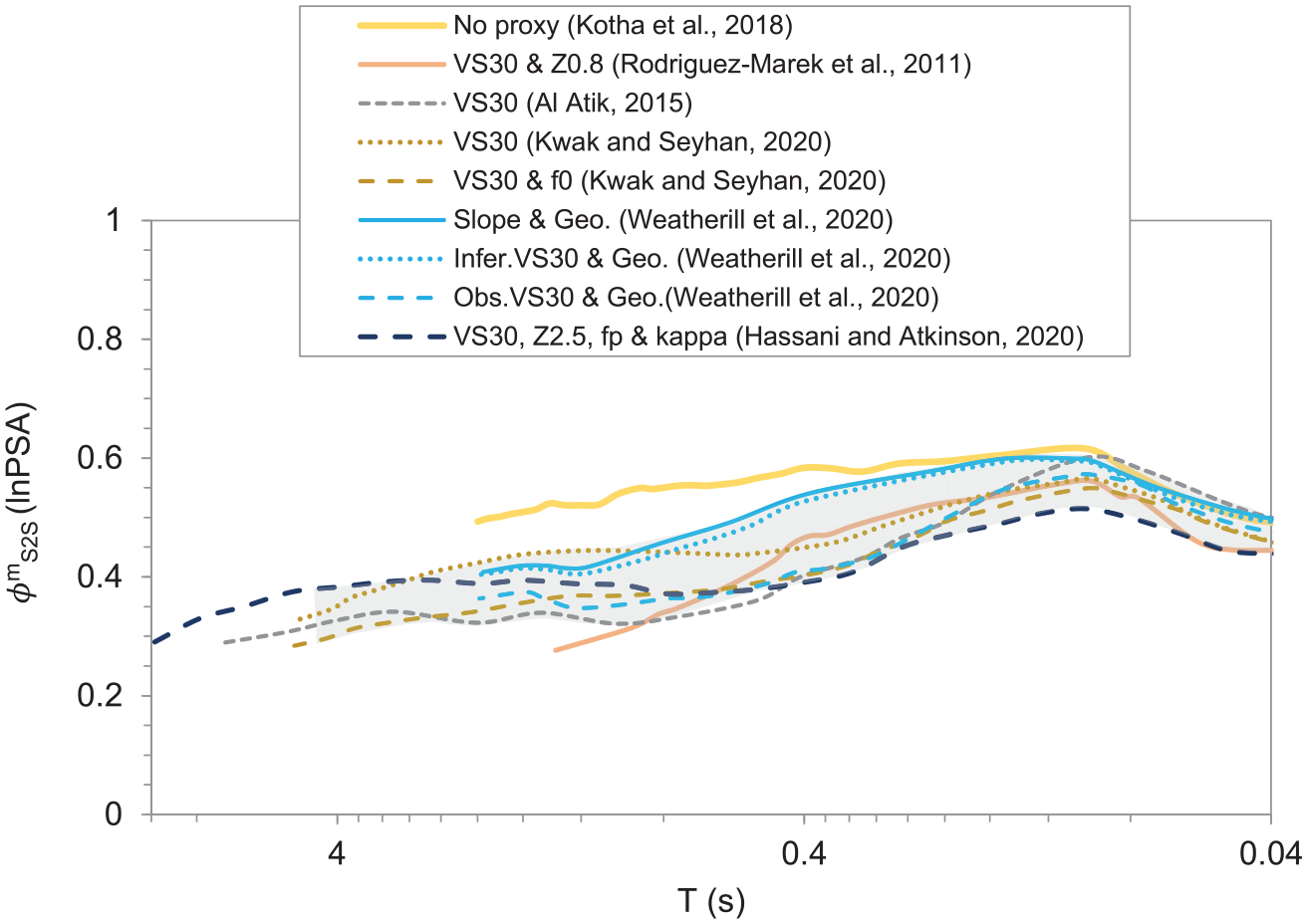
It is worth noting the large between-site variability at frequencies higher than ∼8 Hz, which is absent in PSA-based results (shaded zone in Figure 12). This high-frequency between-site variability in the Fourier domain is consistent with other FAS-based results (e.g. Bora et al., 2019). However, PSA-based between-site variability (Figure 1) is significantly lower at f > ∼8 Hz. This is because, at high oscillator frequencies, the PSA ordinate is not directly proportional to that of the corresponding FAS at the same oscillator frequency, rather it is controlled by a wide band of FAS ordinates (e.g. Bora et al., 2016). This is consistent with the results of Bindi et al. (2017) who reported that PSA-based ground motion variation does not fully capture the high-frequency variability.
Both regression and RF models can reduce the between-site variability in site response (Figure 12). With the inclusion of more and more predictor variables in RF models, the dispersion is further lowered, which agrees with the pattern depicted in Figure 8 using OOB data during the training. For the best-performing model RF7, the between-site variability can be reduced by as much as 0.27 (ln scales) at f = ∼2.7 Hz, though the reduction at higher frequencies is less significant. In the frequency range between 0.1 and 10 Hz, on average, RF7 can lower the variability by 38% (Table 1).
Comparing ML with 1D GRA
In addition to the regression (Amp) and RF models, site responses are also estimated using GRA or SRI, and c-HVSR at the 145 testing sites. The performance of these techniques was assessed in the companion paper (Zhu et al., 2021a). GRA and SRI require 1D site models, including both SH-wave velocity (VS) and small-strain damping (Dmin) profiles for linear analyses. Zhu et al. (2021a) constructed composite profiles (referred to as “V1”) reaching seismological bedrock with VS = 3.45 km/s. KiK-net profiles from borehole logging (referred to as “V0”) were used to fill the portion from the ground surface to borehole depth, whereas J-SHIS profiles were used for the section below. Based on V1, new velocity structures were developed by inversion from eHVSR, referred to as eHVSR-consistent structure “V2.” Dmin profiles were established from VS using the Dmin–VS relationships proposed by Campbell (2009) and J-SHIS, referred to as “D1” and “D2” models, respectively. For c-HVSR, correction spectra were established for different site categories from the training data in the companion paper.
ML versus 1D physics-based modeling
Examining the effectiveness at the testing sites as a whole, GRA using V1 performs poorly at relatively high frequencies (Figure 13a). For f < ∼3.0 Hz, GRA (V1) is effective, on average reducing between-site variability by 34% (Table 1). However, in the range ∼3.0–4.0 Hz, its effectiveness starts declining, and for f > ∼4.0 Hz, GRA (V1) leads to no reduction in dispersion. The poor performance of GRA (V1) at high frequencies is primarily due to our limited ability to precisely depict small-scale variations in VS and site attenuation properties. In the broader frequency range of 0.1–10 Hz, GRA (V1) can only reduce the between-site variability by 25%.
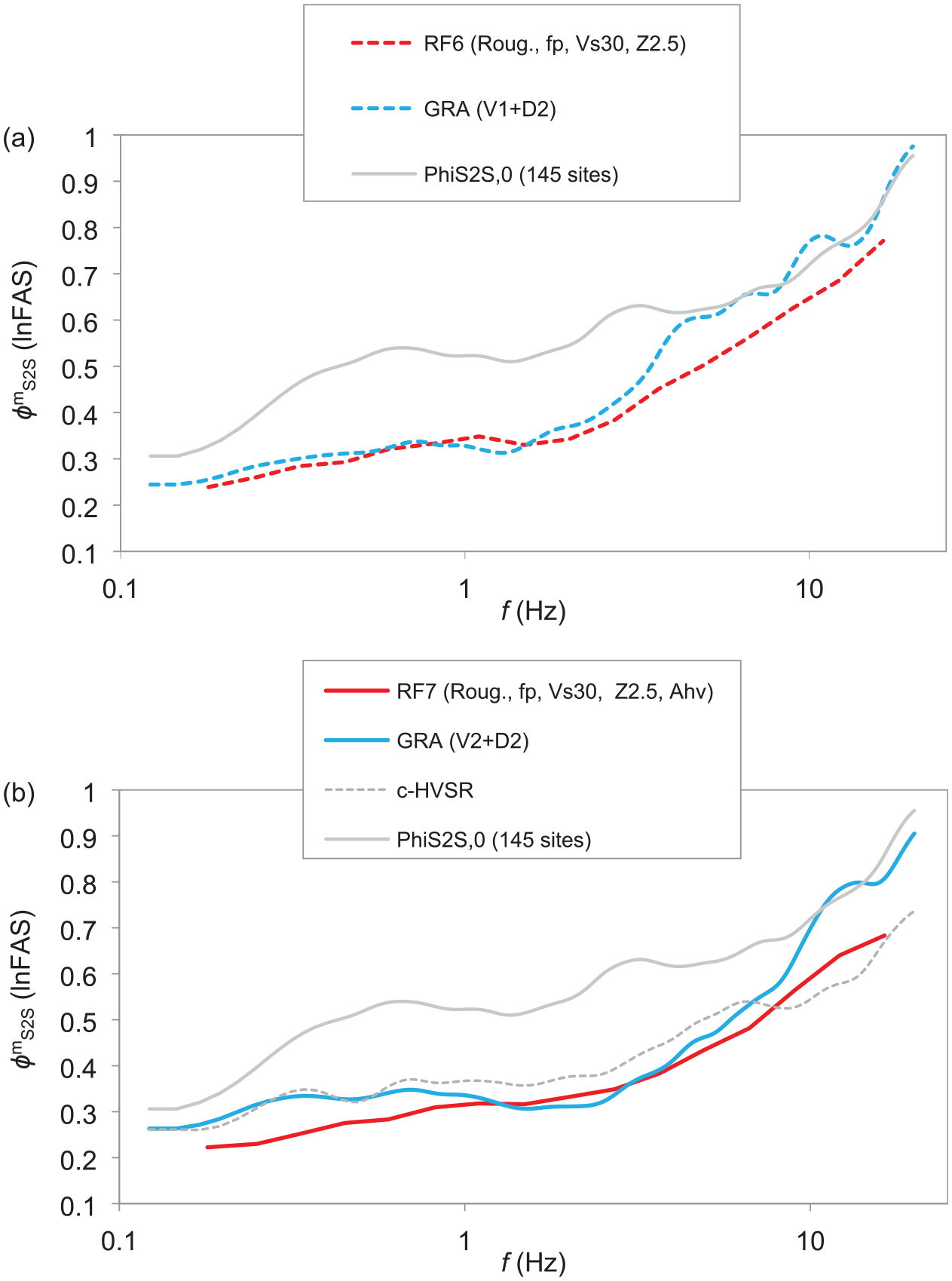
Comparison of
RF models using a few predictor variables could capture more site-specific features of site responses than GRA using detailed 1D earth structures (V1) (Figure 13a). In the frequency range where GRA (V1) is effective, that is, 0.1–3.0 Hz (Table 1), GRA (V1) can achieve a larger margin of reduction in between-site variability (i.e. 34% on average) than RF1–4 models. However, the predictive model RF6 (Roug., fp, VS30, Z2.5) starts outperforming GRA (V1). In the broader frequency range of engineering interests, that is, 0.1 < f < 10.0 Hz, even the predictive model RF4 (Proxies, fp, VS30), where Proxies contain Roug., Geo., and Geomorp., has a slightly lower dispersion than GRA (V1) (Table 1). Subsequent RF models using more predictors have much lower dispersions than GRA (V1).
Use of single-station earthquake recordings
In some site-specific applications, on-site recordings could be collected by instrumenting the target sites to record earthquakes that may be irrelevant for seismic hazard analyses, for example, very distant large events (e.g. Hollender et al., 2018). These on-site recordings may not support the application of recording pair- or network-based empirical techniques, that is, GIT, δS2Ss, and SB(S)R, due to, for instance, the lack of a proper nearby reference site or a regional network. However, they can be used on a single-station basis, for example, in GRA and RF7, to improve the site-specific characterization of site response.
Single-station recordings of weak motions can be used to calibrate the 1D velocity structures to be used in GRA. GRA using V2 profiles from inversion of eHVSR (Figure 13b) can further reduce the between-site variability at frequencies between ∼2 and ∼10 Hz in comparison with GRA (V1) (Figure 13a). This is detailed in the companion paper (Zhu et al., 2021a). In 0.1–10 Hz, GRA (V2) can lower the variability by 31%, as opposed to 25% for GRA (V1) (Table 1). This demonstrates the benefits of collecting on-site recordings.
However, even if earthquake recordings are used to constrain the 1D models for GRA, RF models still could achieve a lower between-site variability (Figure 13b). For 0.1 < f < 10 Hz, RF6, based on a few predictors (i.e. Roug., fp, VS30, and Z2.5), has a similar level of dispersion as GRA (V2) which needs a detailed 1D ground model and on-site recordings (Table 1). If the whole eHVSR curve is also fed into the RF model, that is, RF7, a larger reduction in the dispersion can be realized, 38% for RF7 while 31% for GRA (V2) (Table 1). This again manifests that ML (i.e. RF) is more effective than 1D physics-based modellings in using existing site information.
From using only eHVSR peak frequency to using the whole curve
If eHVSR is available, the whole curve can be used in site-response predictive models, rather than just its peak parameters. The frequency-dependent eHVSR is effective in the whole frequency range 0.1–20 Hz (Figure 12). For 0.1 < f < 10 Hz, RF7 (Roug., fp, VS30, Z2.5, AHV) can lower the between-site variability by 38%, larger than 31% for RF6 (Roug., fp, VS30, Z2.5) using only the peak frequency (Table 1). This demonstrates the effectiveness of eHVSR as a vector-valued predictor (Figure 9).
Another way of using the whole eHVSR curve is through a simple correction, that is, the c-HVSR approach which is also quite promising (Figure 13b). c-HVSR performs better than GRA at high frequencies (>∼8.0 Hz). Although c-HVSR results have a higher dispersion than RF6 and RF7 in the frequency range 0.1–10 Hz (Table 1), c-HVSR is still appealing considering the simple input information that it requires.
We acknowledge that mHVSR maybe preferred over eHVSR considering engineering utility. mHVSR is not used in the current study because microtremors are unavailable at most KiK-net and K-NET sites. However, the performance of eHVSR shown here (e.g. Figure 9) is still useful because we assume it is an upper bound performance limit of mHVSR.
Discussion
Uncertainty/variability in site-response estimates
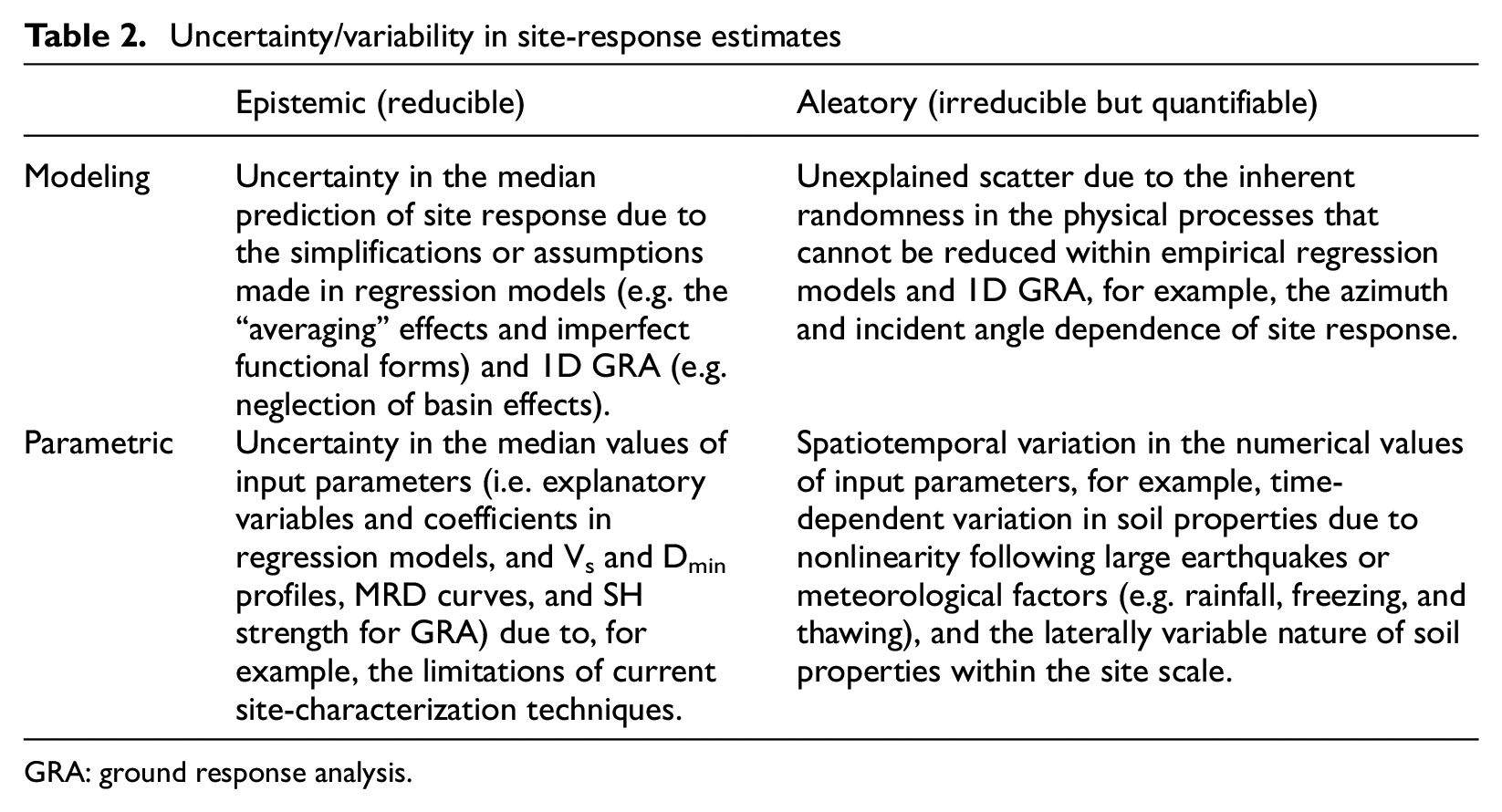
Regression and RF models, c-HVSR, and GRA are, in essence, conceptual/mathematical/physical representations of the natural world (i.e. the complex wave propagation within near-surface geology). These approximations have two sources of uncertainties (Abrahamson et al., 1990): modeling and parametric (Table 2). For the estimation of site responses, modeling uncertainty arises from the simplifications/assumptions/approximations made to the natural world, while parametric uncertainty represents the uncertainty in accurately defining input parameters and model coefficients (Table 2). Both parametric and modeling uncertainties have epistemic and aleatory components (Toro et al., 1997).
Uncertainty/variability in site-response estimates
GRA: ground response analysis.
Aleatory variability (Table 2) is the inherent or natural randomness of site response, for example, the variation from event to event at a single site, and it is irreducible for a model/method m but quantifiable through repeated observations at the same site. However, epistemic uncertainty arises because our site responses are predicted using models/simplified approaches (mathematical and conceptual constructs of reality), and thus it comes with uncertainty due to our lack of data or knowledge, or simplifications/assumptions concerning the validity of the models/approaches (e.g. GRA assumes vertically propagating SH-waves through 1D soil columns, that is, the 1DSH assumptions) or errors in the numerical values of their input parameters (e.g. median Vs profiles in GRA). However, epistemic uncertainty is, in principle, reducible through further research and gathering more and better data, for example, using aggravation factor (e.g. Chávez-García and Faccioli, 2000) to adjust GRA results to account for basin effects. As pointed out by many (e.g. Toro et al., 1997), the distinctions of modeling versus parametric, and epistemic versus aleatory (Table 2) are model/method-dependent. Their partitions are conceptually clear but are often difficult in reality. However, such distinctions are necessary for their subsequent proper treatments, rather than for philosophical reasons.
In this study,
Site effect prediction and its associated uncertainty and variability
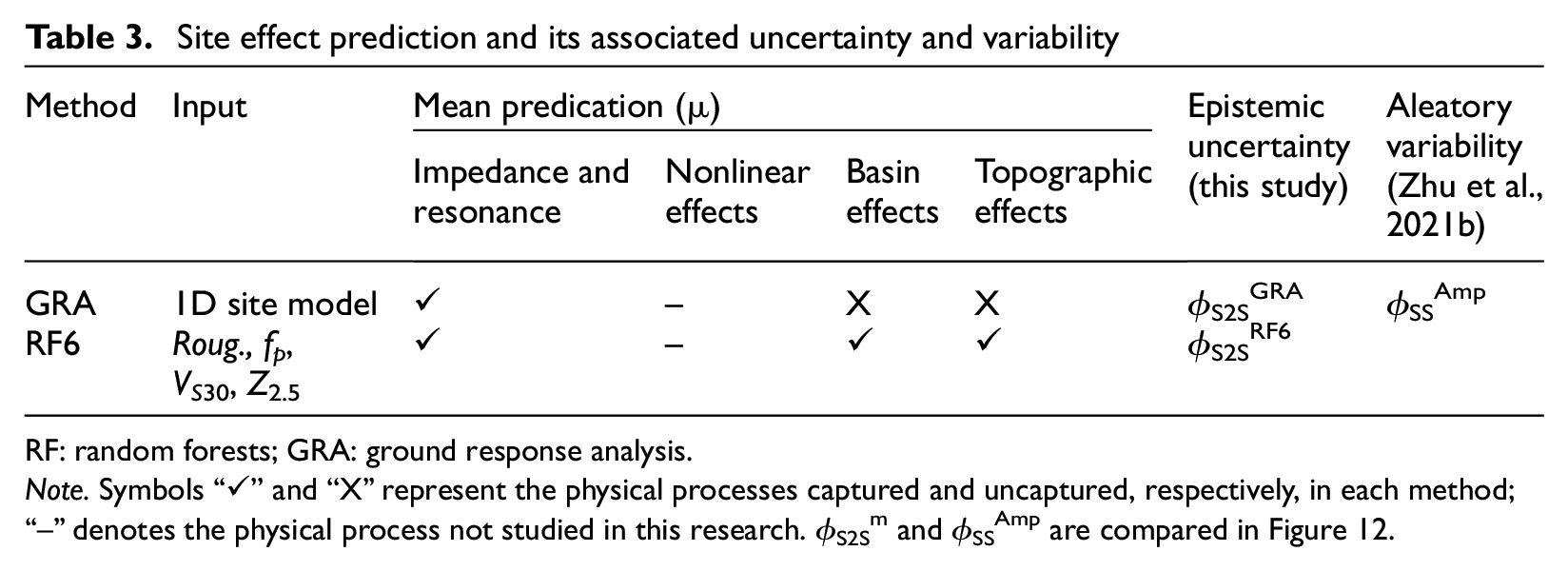
RF: random forests; GRA: ground response analysis.
Note. Symbols “✓” and “X” represent the physical processes captured and uncaptured, respectively, in each method; “--” denotes the physical process not studied in this research. ϕS2Sm and ϕSSAmp are compared in Figure 12.
Aleatory variability in site response (i.e.
Why could ML outperform 1D physics-based modeling?
ML (RF) models using a few explanatory variables could capture more site-specific frequency-dependent features of site responses than physics-based simulations (GRA) using detailed 1D earth structures (V1) (Table 1). However, one shall not be surprised by this finding given that ML techniques have been shown to outperform physics-based modellings in many other disciplines, for example, material science, applied physics, and computational biology (e.g. Alipanahi et al., 2015). This finding in the domain of site-response estimation may be disappointing for many geotechnical earthquake engineers because GRA is often regarded as a site-specific approach. In the following, we will explain why RF models could outperform 1D physics-based modeling.
The parametric uncertainty in GRA results mainly comes from the imperfect representation of the true but unknown 1D site models (e.g. VS and Dmin for linear analyses). Detailed 1D models used in GRA inherently come with a high level of parametric uncertainty, especially in the small-scale variations in material properties. Although the 1D models at the testing sites (KiK-net) are obtained from invasive approaches which are often considered as the “ground truth,” the InterPACIFIC blind tests (Garofalo et al., 2016a) clearly show that estimated VS profiles at a specific site from independent teams using invasive approaches (i.e. cross-hole, downhole, PS suspension logging, and seismic dilatometer test) have a similar level of uncertainty to those using non-invasive techniques, that is, surface and body wave methods. Besides, many KiK-net stations are installed in mountainous regions or margins of sedimentary basins. Such complex geological conditions are unfavorable for invasive methods (Garofalo et al., 2016a, 2016b), especially the shallow portion within 3–4 m from the surface, further inflating the parametric uncertainty in GRA predictions.
In comparison, for regression and RF models, parametric uncertainty arises from the uncertainty in the numerical values of predictor variables and model coefficients (Table 2). However, predictor variables in these models are relatively simple and can be measured or derived with a high accuracy. Furthermore, using a large data set, coefficients of these models can be well constrained with a low margin of error. Thus, we assume that GRA predictions have a higher level of parametric uncertainty than those from regression and RF models developed in this study.
The modeling uncertainty for regression and RF models is mainly because of the underlying assumption that sites in the same class defined by predictor variables would behave in the same way during earthquakes. Thus, regression models, especially those embedded in GMMs (e.g. Douglas and Edwards, 2016), only give estimates in an average sense, resulting in a large modeling error. However, with the use of multiple predictor variables, the modeling error can be significantly lowered. For instance, with the simultaneous use of roughness, fp, VS30, and Z2.5 in RF6, a site is “vividly” depicted in different dimensions (both lateral and horizontal) and different spatial scales. Besides, these predictors have a physical basis (Table 3). For instance, roughness is considered to be correlated with topographic effects (e.g. Rai et al., 2017), fp is an indicator of resonance (e.g. Zhu et al., 2020b), and Z2.5 is arguably related to deep basin effects (e.g. Campbell and Bozorgnia, 2014). As a consequence, RF6 predictions are less generic and can satisfactorily capture many site-specific physical features in site responses at individual sites, thus leading to a reduced modeling error.
In contrast, the modeling error in GRA predictions is primarily due to the underlying 1DSH assumptions. These assumptions are very likely to be violated, to different extents, at many actual sites, especially those having prominent 2D or 3D features (e.g. Pilz and Cotton, 2019) and those prone to surface waves (e.g. Furumura, 2014). In comparison, empirical predictive models are developed directly from data which are a mishmash of sophisticated site effects, for example, basin effects, topographic effects, and surface wave incidence. Thus, these complex site effects, being neglected in 1D GRA, are partially accounted for in empirical models (Table 3).
What is a site-specific approach? A unified view
The finding that the between-site variability of GRA (

where
In PSHA, if sufficient earthquake recordings are available at the site of interest, site responses can be quantified using recording pair- or network-based techniques, that is, GIT, δS2Ss, or S(B)SR with a negligible epistemic uncertainty or standard error (e.g. Faccioli et al., 2015). Results from these techniques can capture the true but often unknown site responses at individual sites, and their corresponding

Therefore, we consider these techniques having a low
A unified view on site-response estimates from different approaches. Amp and ML—classic regression and ML models, respectively; c-HVSR—empirical correction to eHVSR; and TTF—theoretical transfer function from either 1D ground response analysis (GRA) or the square-root-impedance (SRI, also called quarter-wavelength) method.
In site-specific PSHA, 1D GRA is also regarded as a “site-specific” approach in which the single-station sigma is invoked (Equation 7). Then, the epistemic uncertainty in the mean estimate from GRA is quantified by varying input parameters (Electrical Power Research Institute (EPRI), 2012). However, this uncertainty quantification can only capture the parametric component while the modeling component is ignored (Table 2), resulting in a potential underestimation of the epistemic uncertainty in GRA results at sites where 1DSH assumptions do not hold. Unless the GRA modeling uncertainty can also be quantified on a site-specific basis, GRA prediction cannot be treated as “site-specific” as results from recordings (Figure 14).
Among the methods evaluated here, the ML models RF6 and RF7 give more “site-specific” estimation than 1D GRA (Figure 14). Considering that more complex site effects can be readily accommodated in the ML modeling framework, the fully data-driven approach could potentially be an alternative to physics-based simulations. More accurate amplification estimation improves the accuracy and reliability of hazard estimates from PSHA, especially at long return periods (e.g. Kotha et al., 2017; Stewart et al., 2017).
Possible effectiveness of RF models in other regions
Even though RF6 and RF7 outperform 1D GRA in the predictive power at the 145 KiK-net sites in this study, we note that they are trained on 1580 sites all located in Japan. One of the key advantages of 1D GRA is that it can be applied at any site characterized by a velocity profile and without referring to the previous observation data. This invites the following question: how would RF models being trained on Japanese data perform in other regions (e.g. Italy and California) in comparison with 1D GRA? This cross-domain evaluation (e.g. Münchmeyer et al., 2022) is particularly relevant for data-poor regions where we cannot afford to train a region-specific ML model, for example, Northern Europe. However, we will address this question in future studies.
There are a few hurdles in assessing the cross-domain performance of ML amplification models. For instance, the labels (observed amplifications in this case), required for supervised ML, are not created homogeneously across regions. To be specific, amplification data in Japan have a different reference condition from that in Italy. Thus, data fusion is needed and is nontrivial. Among the techniques worth exploring in cross-domain applications, one is to deploy the ML model trained for Japan via transfer learning (e.g. Pan and Yang, 2010) to target regions with fewer data. Another is to develop physics-informed ML models which are less data-hungry and more extrapolatable than purely data-driven deep learning models (e.g. Reichstein et al., 2019).
Testing the cross-domain performance of ML amplification models is beyond the scope of the article. It is, however, foreseen that the choice of the most appropriate method to predict amplification at target sites may depend on the geophysical environment and the amount of available information. Nevertheless, we have shown here the advantages of ML techniques (i.e. RF) over the 1D-based physical modeling in tackling complex site effects (e.g. surface and subsurface topographic effects).
In this study, we only employ an ML algorithm that relies on hand-crafted features (e.g. eHVSR in RF7 as the representation of single-station recordings). Using engineered features can be seen as both an advantage (e.g. domain-knowledge-guided) and a disadvantage (e.g. possibly non-optimal). For example, eHVSR in RF7 might not be the optimal representation of earthquake recordings whenever available, rather RF7 is to be re-trained with the HVSR of microtremors in the future. Nevertheless, many deep learning algorithms allow for the automatic extraction of useful information from “raw” input data and is yet to be explored here. Nonlinear site response also needs to be considered in the future. Hence, it warrants further exploration of other ML algorithms in amplification prediction, not just about improving its accuracy but also about addressing its challenges and gaining new insights into site effects.
Conclusion
To address the question of how well we can predict site-specific site responses (average over many earthquakes), we tested and compared the effectiveness of different estimation techniques using a unique benchmark data set. The benchmark data set consists of detailed site metadata and absolute Fourier outcrop linear site responses based on observations at 1725 K-NET and KiK-net sites. Evaluated approaches include 1D GRA, the SRI method (also called the QWL approach), empirical correction to the horizontal-to-vertical spectral ratio (eHVSR) of earthquakes (c-HVSR), and classic regression and RF (a supervised ML technique) site-response models. Correction spectra for c-HVSR, regression, and RF models were developed on a training data set (1580 sites). The performance of each technique is then assessed at 145 independent testing sites using the standard deviation of residuals between observations and predictions, that is, between-site (site-to-site or inter-site) variability
Our results show that ML-based model using a few predictor variables (i.e. Roug., fp, VS30, and Z2.5) could achieve a lower
Research Data
sj-xlsx-1-eqs-10.1177_87552930221116399 – for How well can we predict earthquake site response so far? Machine learning vs physics-based modeling
sj-xlsx-1-eqs-10.1177_87552930221116399 for How well can we predict earthquake site response so far? Machine learning vs physics-based modeling by Chuanbin Zhu, Fabrice Cotton, Hiroshi Kawase and Kenichi Nakano in Earthquake Spectra
Research Data
sj-zip-2-eqs-10.1177_87552930221116399 – for How well can we predict earthquake site response so far? Machine learning vs physics-based modeling
sj-zip-2-eqs-10.1177_87552930221116399 for How well can we predict earthquake site response so far? Machine learning vs physics-based modeling by Chuanbin Zhu, Fabrice Cotton, Hiroshi Kawase and Kenichi Nakano in Earthquake Spectra
Supplemental Material
sj-pdf-3-eqs-10.1177_87552930221116399 – Supplemental material for How well can we predict earthquake site response so far? Machine learning vs physics-based modeling
Supplemental material, sj-pdf-3-eqs-10.1177_87552930221116399 for How well can we predict earthquake site response so far? Machine learning vs physics-based modeling by Chuanbin Zhu, Fabrice Cotton, Hiroshi Kawase and Kenichi Nakano in Earthquake Spectra
Footnotes
Acknowledgements
This work is partially supported by the project “DARE: Dense ARray for seismic site effect Estimation” funded by the French National Research Agency (Grant # ANR19-CE31-0029) and the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation, project number 431362334). The authors thank the National Research Institute for Earth Science and Disaster Prevention (NIED), Japan for making the strong-motion and PS logging data available. They also thank Dr Sean K. Ahdi and two anonymous reviewers who provided very constructive feedback on this work.
Data and resources
Site parameters used in this study are obtained from an open-source site database (https://doi.org/10.5880/GFZ.2.1.2020.006). Seismograms and KiK-net borehole logging data (V0 profiles) were downloaded from http://www.kyoshin.bosai.go.jp (profiles were accessed on February 05, 2018). J-SHIS is an integrated online platform developed by the National Research Institute for Earth Science and Disaster Prevention (NIED) for the Probabilistic Seismic Hazard Maps for Japan and various underlying data (https://www.j-shis.bosai.go.jp/map/JSHIS2/download.html?lang = en). The software Strata (Kottke et al., 2013) is used for GRA. MATLAB is used to carry out least-squares and RF regressions. Supplemental material contains a table (![]() ), a word document, and a zip file. Supplemental Table S1 lists the 145 testing sites and their metadata. The word document includes detailed description of RF model training, regression coefficients of parametric models, residual plots for all models, and predictor relative importance for RF models. The “Testing.zip” contains plots of comparison between observation and model prediction at the 145 testing sites.
), a word document, and a zip file. Supplemental Table S1 lists the 145 testing sites and their metadata. The word document includes detailed description of RF model training, regression coefficients of parametric models, residual plots for all models, and predictor relative importance for RF models. The “Testing.zip” contains plots of comparison between observation and model prediction at the 145 testing sites.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.