
Abstract
Pedestrian navigation decisions take place simultaneously at multiple spatial scales. Yet most models of pedestrian behaviour focus either on local physical interactions or optimisation of routes across a road network. We present a novel hierarchical pedestrian route choice framework that integrates dynamic, perceptual decisions at the street level with abstract, network-based decisions at the neighbourhood level. The framework is based on construal level theory which states that decision makers construe decisions based on their psychological distance from the object of the decision. We implement this route choice framework in a spatial agent-based model in which pedestrian and vehicle agents complete trips in an urban environment. Using global sensitivity analysis techniques, we demonstrate the interaction between route choice components representing decision making at different spatial and temporal scales. Additionally, through comparison to a least cost network model, we demonstrate the increased route heterogeneity produced by this approach. This work could form the basis of an alternative method for producing pedestrian route alternatives. The granularity and scale of the modelled pedestrian trajectories could also help improve appraisals of street infrastructure.
Introduction
Pedestrian movement in urban areas, along pavements and across carriageways, results from decisions made in relation to multiple spatial and temporal scales. Pedestrians are required to make route choice decisions to non-visible targets in large spatial areas as well as avoid obstacles and coordinate with other road users as they progress along the street. These decisions are informed by both cognitive representations of the urban environment (Golledge, 1999) (derived from previous experience or information use) and perceptions of the immediate environment, using vision, for example (Kitazawa and Fujiyama 2010; Dey et al., 2019). These are also dynamic decisions in the sense that decisions must be enacted at certain points in time and are made in relation to a dynamically changing environment (Ariely and Zakay, 2001; Kerstholt and Raaijmakers, 2002). Route choice decisions might be made in advance but are enacted when a pedestrian reaches a junction. Similarly, pedestrians interact among themselves and with other road users by coordinating potentially conflicting trajectories and by practising socially normative behaviour. Tong and Bode (2022) propose four principles of pedestrian route choice which highlight the multi-scale and dynamic nature of these decisions.
We can identify important pedestrian behaviours that relate to this characterisation of route choice decisions as multi-scale and dynamic. Pedestrians make crossing location choices based on levels of traffic flow (Papadimitriou, 2012, 2016; Anciaes and Jones, 2020; Cantillo et al., 2015), with higher traffic reducing the propensity of choosing an informal crossing option and increasing the willingness to make a detour to use crossing infrastructure. Traffic also affects larger scale walking behaviour with pedestrians avoiding crossing roads (Anciaes et al., 2018), avoiding busy roads altogether (Anciaes et al., 2019; Bornioli et al., 2019; Sevtsuk et al., 2021), and avoiding walking trips altogether (Appleyard and Lintell 1972; Bornioli et al., 2019), with consequences for health and sustainability (Talen and Koschinsky, 2013; Woodcock et al., 2009). For pedestrians’ routes along individual roads and across multiple roads to be influenced by traffic flow require some process by which pedestrians incorporate observations of the immediate, dynamic road environment into route choice at higher spatial scales. Furthermore, pedestrians have shown strong social conformity behaviours, leading to increased risk taking in road crossing behaviour (Harrell, 1991; Zhou et al., 2009; Wang et al., 2010; Jiang et al., 2019; Cœugnet et al., 2019). What emerges is a complex environment whereby pedestrians make subjective route choice decisions across multiple spatial scales, influenced by others doing likewise, leading to simultaneous road crossing decisions.
Incorporating dynamic street level interactions with route choice across multiple road links potentially enables greater understanding of how interactions shape pedestrian safety and experience across the whole of their journey. This aligns with the complex systems paradigm (Gershenson and Heylighen, 2005) in which urban phenomena emerge ‘from the bottom up’ from the actions of individual agents (Heppenstall et al., 2016). In this case, we might ask whether and how differences between road environments (e.g. in terms of conflict risk) emerge from the actions of individual road users. Few existing models of pedestrian road crossing behaviour permit such analysis. Where dynamic and interactive road crossing decisions have been modelled, they lack integration with pedestrian navigation through larger geographies (Wang et al., 2021; Wang 2012; Feliciani et al., 2017; Markkula et al., 2018).
Additionally, while studies of pedestrian navigation have addressed ad hoc integration of decisions across spatial scales, they have typically lacked a robust theoretical framework in which to frame their integration or sufficient granularity to represent street-level movement. Kielar et al. (2018) present six methods for graph-based navigation in urban street environments based on spatial cognition principles; however, the integration of these methods is not similarly justified in cognitive or psychological terms. This approach is also limited to graph-based navigation and cannot incorporate the navigation of continuous spaces. Filomena et al. (2020) model pedestrian navigation using a theoretically robust multi-scale representation of urban environments, but this work lacks the granularity required to represent street-level movement. Torrens (2012) presents a highly granular agent-based model of pedestrian movement in continuous spaces that is well justified in terms of pedestrian spatial cognition. However, agents’ path planning does not account for dynamic or interactive components which are only present in obstacle avoidance decisions. This is inadequate for representing pedestrians in street environments because interactions influence routes in ways that cannot be treated simply as collision avoidance. Wozniak and Dziecielski (2022) simulate non-optimal pedestrian routes through an urban neighbourhood that are influenced by agent interactions but do not consider vehicle traffic and pedestrian–vehicle interactions. Tong and Bode (2021) present a model of pedestrian route choice that does integrate decisions across spatial scales but is also not directly applicable to road crossing and road user interaction.
A central challenge in modelling pedestrian route choice therefore remains – the robust integration of route choice and navigation decisions made at the street level, an interactive, dynamic environment which pedestrians sense directly, and those made in relation to the neighbourhood, for which direct sensory information is limited and instead is represented in more abstract terms. Addressing this gap could improve the representation of pedestrian safety in urban models by generating conflict risks through the decision making of individual agents.
We propose that the construal level theory (CLT) provides a suitable framework for combining these decisions through its explanation of how the psychological distance between a decision maker and the object of their decision determines how the decision is construed. We present a hierarchical pedestrian route choice framework informed by CLT and implement this in a spatial agent-based model (ABM) of pedestrian and vehicle movement in an urban neighbourhood. We adopt an exploratory modelling approach, using behavioural plausibility to constrain model parameters and global sensitivity analysis to demonstrate model behaviour. The purpose of the model is to describe pedestrian behaviour generated by a plausible psychological representation of human decision making (Edmonds et al., 2019; Edmonds and Moss, 2005).
The remainder of the paper proceeds as follows. We introduce CLT and our novel route choice framework below. In the ‘Methods’ section, we detail our specific implementation of this framework within a spatial ABM before setting out the simulation experiments used to explore the behaviour produced by the ABM. The outputs of these simulations are presented briefly in the ‘Results’ section and are interpreted in relation to CLT and pedestrian behaviour in the ‘Discussion’ section.
Construal level theory decision-making framework
The Construal level theory (Trope and Liberman, 2011) provides a theoretical framework that describes how decisions spanning spatial or temporal scales are construed and integrated. CLT states that how a decision is construed depends on the ‘psychological distance’ the decision maker associates with that decision (Trope and Liberman, 2010). Psychological distance is defined by Trope and colleagues as the ‘extent of divergence from direct experience of me, here, and now along the dimensions of time, space, social perspective, or hypotheticality’ and is considered to be a ‘base psychological dimension that represents how spatial, temporal, and social distances are perceived’. According to CLT, decisions pertaining to greater psychological distances are made based on ‘high-level’ construals that are abstract- and goal-orientated (Liberman and Trope, 1998; Trope and Liberman, 2003). Conversely, decisions pertaining to lesser psychological distances are made based on ‘low-level’ construals that are detailed and feasibility orientated.
Trope and Liberman (2010) argue that more abstract ‘high-level’ construals enable people to ‘traverse psychological distance’ (and also that traversing psychological distance prompts abstraction). Abstractions afford distance traversal because they are more invariant than their component elements and therefore remain constant across psychological distances. This explanation for the connection between psychological distance and construal level is supported by experiments which identify differences in how visual and verbal stimuli are identified. Amit et al. (2009) find that verbal stimuli are better classified at distant psychological distances, whilst visual stimuli are better classified at proximate psychological distances. This relationship is explained as visual stimuli corresponding to less abstract representations than verbal stimuli and therefore being congruent with lesser psychological distance. The connection between visual stimuli and psychological construal is further developed by Yan et al. (2016) through experiments that demonstrate visual information processing causes participants to adopt low-level construals. These findings suggest an association between visual stimuli and psychologically proximate experience that results in visual stimuli prompting low-level decision construal.
CLT’s identification of decision hierarchies shares conceptual similarities to the use of hierarchies in theories of human spatial cognition. Spatial knowledge is organised hierarchically across spatial scales (Hirtle and Jonides, 1985) in ways that are directly relevant to wayfinding behaviour (Passini, 1984; Golledge, 1999). CLT complements spatial cognition theories by distinguishing between decision hierarchies through the more general concept of psychological distance, providing a theoretical framework for decisions that are outside the scope of spatial cognition theories. Specifically, we argue that the role of psychological distance and visual information processing in determining decision construal makes CLT a suitable theoretical framework for modelling dynamic street-level pedestrian movement across urban neighbourhoods.
Consider a pedestrian walking from a public transport station to their place of work a few blocks away. The section of road they start their journey on is spatially and temporally proximate (it takes a short time to reach any location on this section). Stimuli (road users, infrastructure, etc.,) within this immediate environment can be visually perceived with ease and exhibit a high degree of certainty owing to the short distances and timescales involved. As a result, we expect decisions regarding how to progress through this road section to be based on ‘low-level’ construals – detailed and feasibility based. Beyond the immediate environment, stimuli are perceived to be spatially and temporally distant and less certain as the visual field becomes occluded. Decisions regarding how to progress beyond the immediate environment therefore require ‘traversing psychological distance’ and should be based on ‘high-level’ construals – abstract and desirability based.
As the pedestrian progresses along their route, previous decisions made with respect to high-level construals are reconsidered under low-level construal on account of the reduced psychological distance and increased availability of visual information. This aligns with previous research that finds pedestrians choose crossing locations sequentially, evaluating exactly how to progress along a road link only once the pedestrian reaches that road link (Papadimitriou, 2012).
Methods
Model overview
To demonstrate the effect of representing pedestrian decision making in this way, we propose and implement a hierarchical CLT route choice model. We define two levels of decision making – upper level and lower level – corresponding to high and low decision construal. Choices at each level are defined in terms of the spatial information available at that level, as illustrated in Figure 1(a). Upper-level route choice navigates to locations that are psychologically distant based on an abstract representation of the environment (as required to ‘traverse psychological distance’). This choice identifies which roads the pedestrian intends to travel on and cross over. Lower-level route choice navigates to locations that are psychologically proximate. In doing so, upper-level choices are re-construed, using more detailed spatial information that is only perceived for the psychologically proximate environment. A central contribution of this paper is feedback from lower- to upper-level route choice whereby upper-level choices are re-evaluated in terms of feasibility at the lower level. (a) Diagram illustrating the CLT route choice framework. Red pillars indicate an origin and destination. Within the psychologically proximate environment road users and crossing infrastructure can be perceived. The psychologically distant environment is perceived as more abstract. (b) Summary of upper-level and lower-level route choice. Grey arrows indicate interaction between levels through choosing to cross a road (upper to lower) and choosing to postpone crossing (lower to upper). (c) The pavement network for one road link.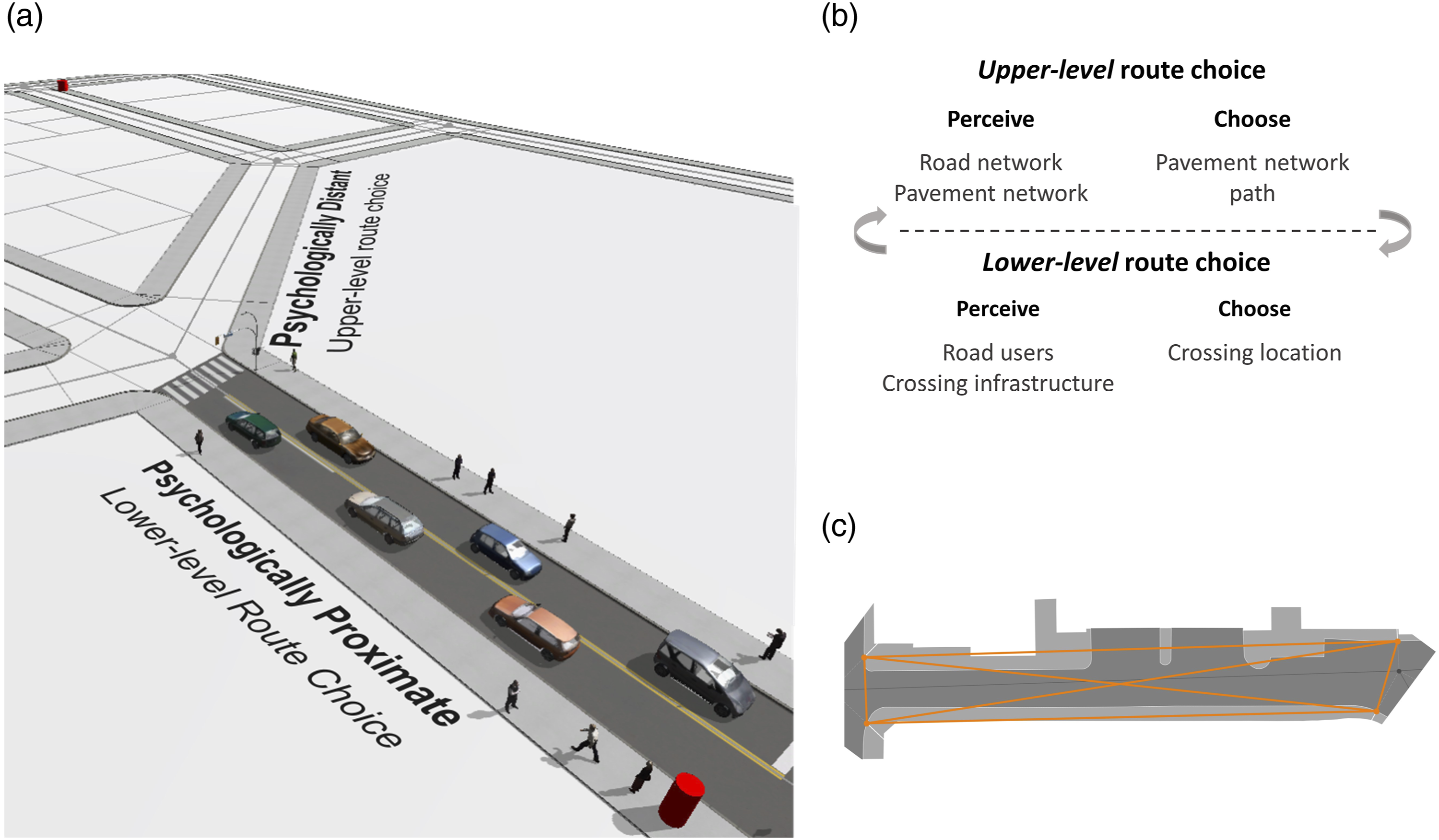
Upper-level route choice
Upper-level route choice is construed at a high-level that is abstract and desirability based. The pedestrian perceives the environment in abstract terms as a road network and a pavement network and chooses a path on the pavement network. Figure 1(c) shows the pavement network for one road link. Since high-level construal is desirability based, road crossing is represented by line-of-sight links. These either connect opposite sides of the road at the same end of a road, termed direct crossing links, or connect opposite sides of the road at either end of a road, termed diagonal crossing links, or do not cross the carriageway, termed non-crossing links. The process of producing the networks is detailed further in the Supplementary Material.
Upper-level route choice is controlled by two parameters:
First, the shortest path from trip origin to destination on the road network is identified using Dijkstra’s algorithm (Dijkstra et al., 1959), with link weight given by link length. This simplistic choice of road network path is sufficient because the focus of this study is route choice at the sub-road link level.
Shortest path road links within the threshold angular distance set by
Once a road link is traversed, the upper-level path is re-planed to account for the planning horizon potentially extending to a new section of the pavement network.
The weights of pavement network links that cross roads could incorporate many factors such as traffic level, road design, crossing infrastructure, and pedestrian preferences. For the purposes of this study, we do not attempt to calculate or model these weights. Instead, upper-level paths are chosen by either a distance minimising or crossing minimising heuristic, chosen to represent an abstract, desirability based choice. These over-simplifications represent carriageways as either a barrier or facilitator of pedestrian movement. When distance minimising
Figure S3 in the Supplementary Material illustrates how upper-level parameters influence which paths are chosen.
Lower-level route choice
The lower-level route comprises way points along a pedestrian’s current road link that determine where to walk on the pavement and where to cross to road. Lower-level choices are informed by additional spatial information that is available at this level – the locations and velocities of other road users and the location and type of any crossing infrastructure. This detailed spatial perception has a limited extent covering only the current road link as illustrated in Figure 1(a) (vehicles on neighbouring links can be perceived to allow anticipation of vehicles entering the current road link).
The crossing location choice set consists of any crossing infrastructure located on the current road link, referred to as marked crossings, in addition to crossing at the pedestrian’s current location, referred to as an informal crossing (i.e. jaywalking). Because space is treated as continuous at the lower level, this permits crossing trajectories at any location. Lower-level route choice between these alternatives is modelled using a novel sequential sampling discrete choice model inspired by Golman et al. (2019).
The sequential sampling model iteratively accumulates preferences for each crossing alternative until a threshold is reached which triggers the choice. Each time step a crossing alternative in the choice set is sampled and its utility is added to the preference value for that alternative. Preference values for all alternatives are decayed at each step to represent the greater importance of more recent information.
Traversing a non-crossing link does not require any further route choices – the way points are the nodes either end of the non-crossing link and pedestrian agents simply move between these. To traverse either a direct crossing or diagonal crossing link, upper-level route choice is re-construed at the lower level as a choice of crossing location. The entrance and exit points of the chosen crossing become the agent’s way points, followed by the pavement node at the end of the road. For direct crossings, the crossing location choice is made from a stationary position at one side of the direct crossing link. For diagonal crossings, crossing location choice is made while moving along the pavement since diagonal crossing links represent movement both along and across a road link. This process is illustrated in Supplementary Material Figures S3(f) and S3(g).
When traversing a diagonal crossing link, the pedestrian may reach the end of the road before a crossing choice is made, at which point a new upper-level route is planned due to the planning horizon progressing. In this case, the initial choice to cross based on a high-level construal (upper level, abstract, desirability based) is updated based on low-level construal (lower level, detailed, feasibility based). This can cause crossing postponements whereby lower-level route choice does not identify a suitable crossing location before a new upper-level path is chosen. Nested crossing decisions are also possible: an upper-level choice to cross a particular road link followed by a lower-level choice of specific crossing location. This is how feedback between decision levels is achieved.
The specific details of the sequential sampling crossing choice model are as follows. Sampling probability for crossing alternative


Once sampled, the preference values for each crossing alternative are updated according to

The utility of a crossing alternative is given by the weighted sum of two indicators: a measure of vehicle exposure and of the detour incurred by using the crossing. The detour distance indicator is given by

The vehicle exposure indicator is a measure of whether any vehicles would pass through the crossing in the time it would take the pedestrian to cross, assuming constant vehicle velocity.

A binary value is used to ensure the indicator is expressed on the same scale as
High utility values therefore correspond to crossings which involve little detour and are marked or, if informal, are on roads with low vehicle flow.
The total utility of crossing alternative

Low
Finally, a choice of crossing alternative is triggered when the preference
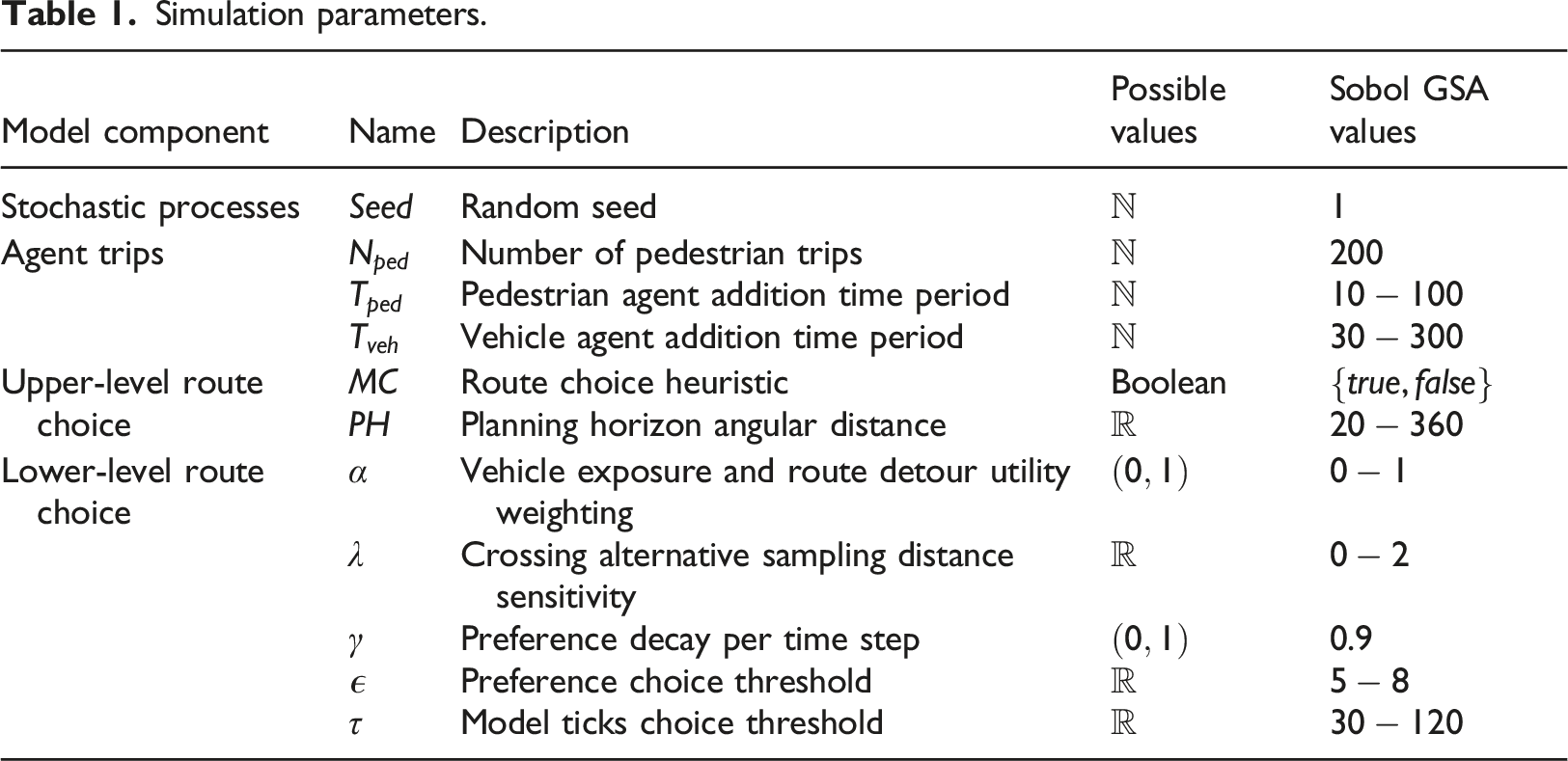
Simulation parameters.
Agent-based model implementation
To demonstrate the behaviour produced by the hierarchical CLT route choice model, we implement it in a spatial ABM composed of pedestrian and vehicle agents. The ABM is developed using open source Java-based ABM software Repast Simphony (North et al., 2013) and is available at https://github.com/obisargoni/multiscale-ped-abm.
Below, the ABM is described following the framework of Crooks et al. (2018).
The Observer
We are interested in observing the route choice behaviour of pedestrian agents. For each pedestrian agent, we record its origin and destination pavement node, the pavement network links it traverses, and its road crossing locations.
The World
The routes of pedestrian agents are modelled in three different environments in order to explore how route choices are dependent on the environment as well as on route choice parameters. We consider two synthetic environments and one environment built using real geometries, as shown in Figure 2. All environments are 1 km catchment areas from a single location with approximately equal numbers of intersections. The real road network is a catchment area for Clapham Common underground station in south west London. The two synthetic road networks are grids with only right-angle turns. The Uniform Grid environment has uniform link lengths while the Quad Grid is produced using a quad tree algorithm that produces a variety of road link lengths. Further details on network construction are in the Supplementary Material. Road network for each of the model environments.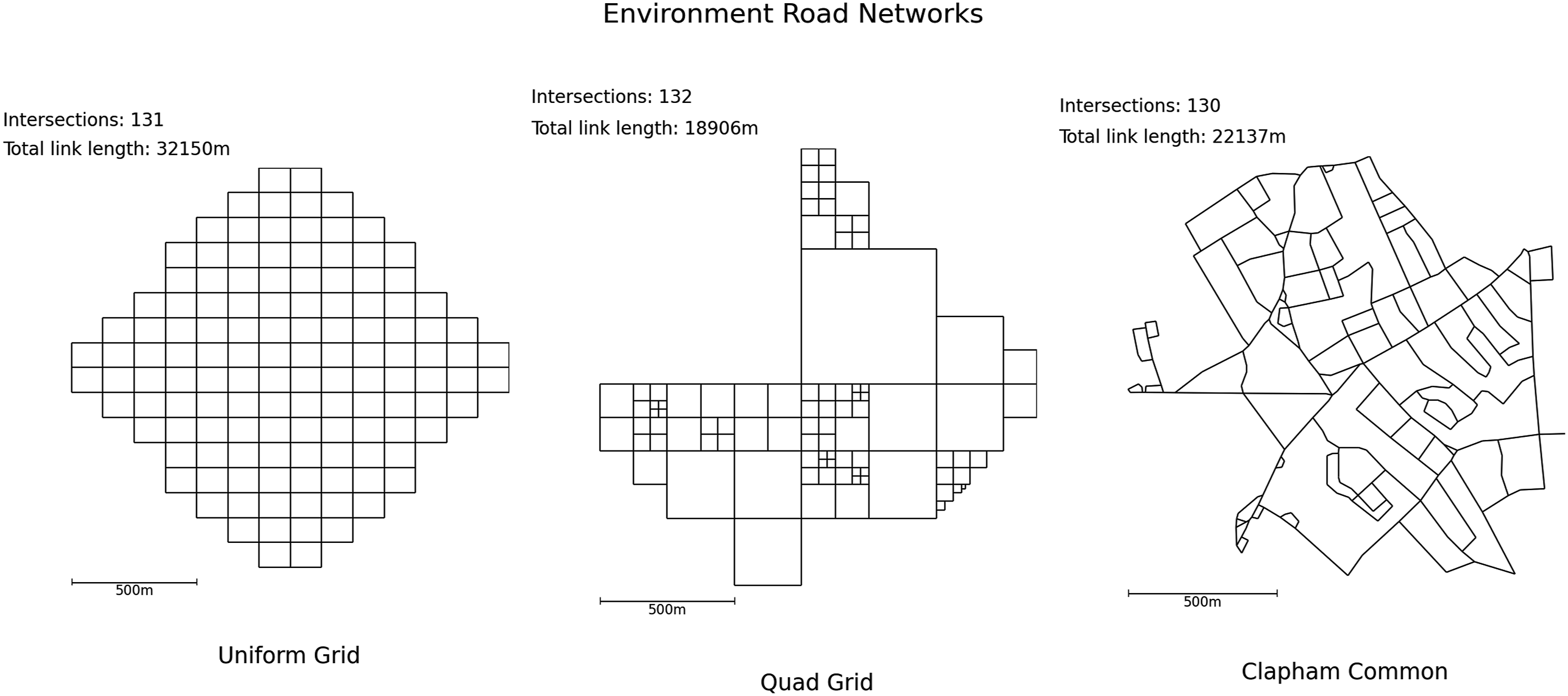
Pedestrian and vehicle origins are uniformly randomly distributed throughout this catchment area.
Marked crossings are placed at the entrances to side roads and around intersections, which assumes pedestrians have right-of-way at these locations.
Each simulation tick corresponds to 1 s.
The Interactions
Vehicle agents interact with other vehicle agents through a simple car following model with no overtaking, adapted from Krauss (1998). When vehicle agents reach an intersection, they progress onto the next link once there is capacity for an additional vehicle. Vehicle agents follow the shortest distance route from their origin to destination and move along road network links.
Pedestrian agents move and interact with other pedestrian agents according to a ‘cognitive heuristic’ model (Moussaid et al., 2011) in which agents choose a walking direction that minimises deviation from their desired direction whilst accounting for the positions and velocities of other pedestrians. The parameter values for this model are listed in Table S1 in the Supplementary Material and are kept fixed throughout. The angular resolution of the field of vision was increased from the value used in Moussaid et al., 2011 to reduce computational cost.
Pedestrian agents interact with the environment and vehicle agents through the hierarchical CLT route choice model. The choice of crossing location is informed by infrastructure location and vehicle traffic. When a pedestrian agent does cross the road, vehicle agents perceive the pedestrian agent and yield to it. Vehicle agents’ velocities are updated such that they never collide with a pedestrian agent. Pedestrian crossing can therefore cause vehicle queues and delays.
The Agents Vehicle and pedestrian agents are added to the world with a time period given by parameters
The number of pedestrian agents,
Simulation experiments
This section describes the exploratory simulation experiments used to demonstrate the route choice behaviour produced by the framework. We perform global sensitivity analysis (GSA) to investigate how paths vary in response to changes in parameter values. Then we compare these paths to those produced by a least cost route choice model that uses network link weights to model road crossing behaviour.
Setting parameter ranges
The range of plausible values model parameters can take is chosen partly by ensuring the following plausibility conditions: 1. Pedestrian agents can choose between crossing alternatives within a reasonable time frame. 2. Pedestrian agents’ choice of crossing location is sensitive to vehicle traffic and crossing alternative attributes. 3. Pedestrian agents postpone crossing if no suitable crossing infrastructure is available.
To do this, small-scale simulation experiments are run in which pedestrian agents move along just one or two road links, described in detail in the Supplementary Material Section S3. Behaviour 1 is ensured by setting
The
Pedestrian agents’ speed is drawn from a lognormal distribution
The random seed is held constant across all simulations, removing sources of stochastic variation. This holds pedestrian trips constant so that within each environment the same 200 pedestrian trips are modelled in each simulation run.
The ABM has 11 parameters in total, including the random seed, which are listed in Table 1 along with their bounds. Of these, three parameters are held constant – the random seed,
Global sensitivity analysis
Simulation experiments were performed in the three model environments. These experiments inform whether the dependence of routes on vehicle traffic produced in the small-scale experiments is sustained in larger study areas with a variety of trips.
Four metrics are used to quantify pedestrian agents’ routes. Mean upper-level path length for each simulation run 
The percentage of pedestrian agents whose path length is equal to the shortest path length,
The road crossing behaviour of pedestrian agents is measured in two ways. The mean frequency of postponing crossing, 
Additionally, the percentage of road crossings that are at informal (rather than marked),
Since the same pedestrian agent trips are simulated in each run, variations in these metrics between runs are due to differences in route choice behaviour alone.
Eight model parameters are varied, and we calculate the sensitivity of
GSA simulations were run on a Windows Server with a 3.30 GHz processor and 128Gb of RAM. The 2560 model runs took 120, 90, and 220 min to complete for the Uniform Grid, Quad Grid, and Clapham Common environments, respectively.
Least cost model comparison
Finally, we compare the CLT route choice model to an optimum least cost network model that uses variable link weights to represent different pedestrian preferences.
In this model, agent routes are given by the least cost path on the pavement network. As with the CLT model, the least cost path is constrained to the section of the pavement network that follows the agent’s road network path. This ensures that the same total amount of spatial information is available under each model. To account for road crossing and vehicle traffic, we parameterise the weight of pavement network links as follows
Results
Global sensitivity analysis
Figure 3 plots Scatter plots with regression lines for each model parameter and output metric. Parameters Histograms of output metrics across simulation runs. Below the histograms are the total effect sensitivity indices of each metric to each parameter. Confidence intervals are given by the variation across the 256 index values produced from the 2560 simulation runs.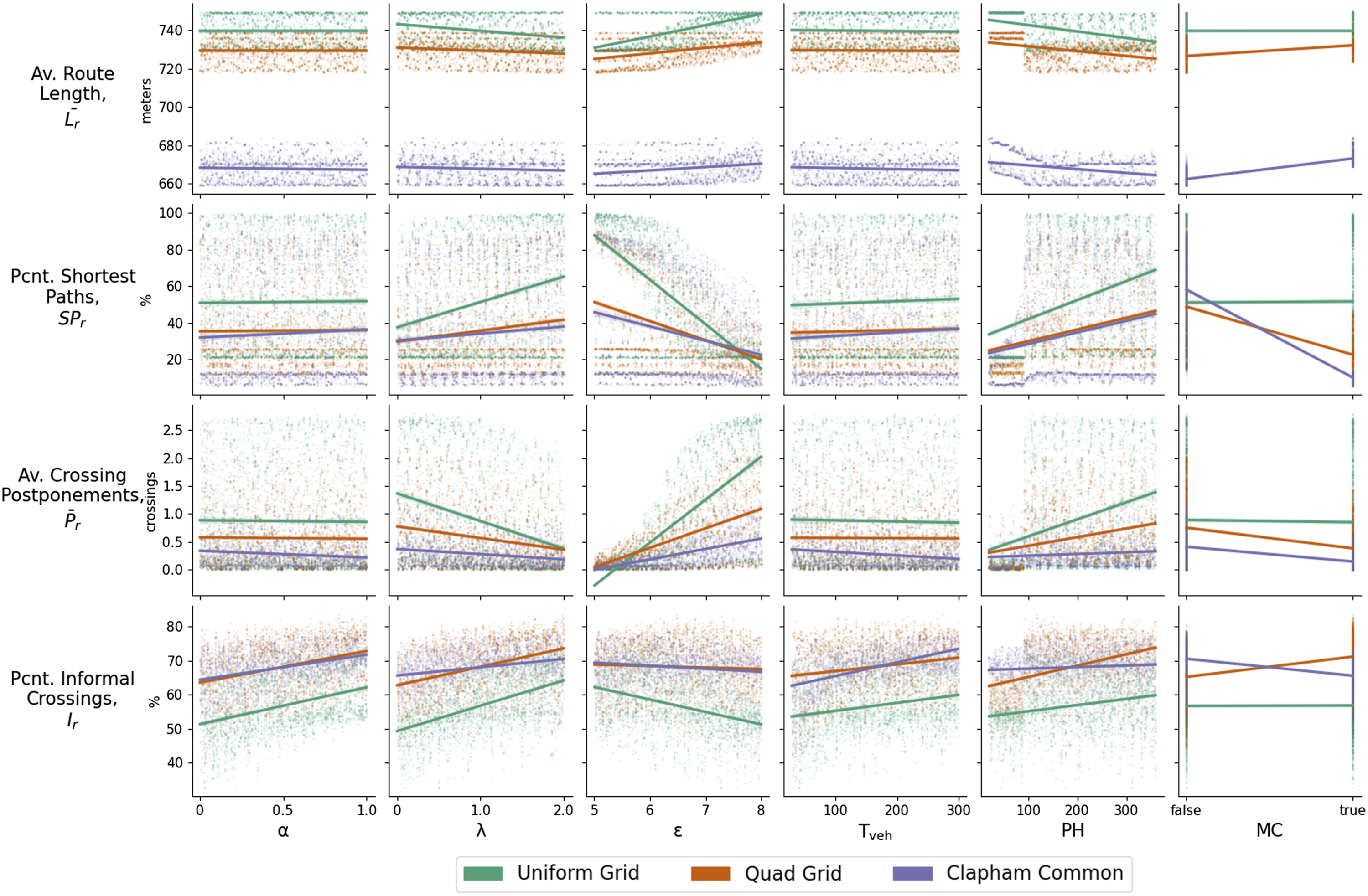
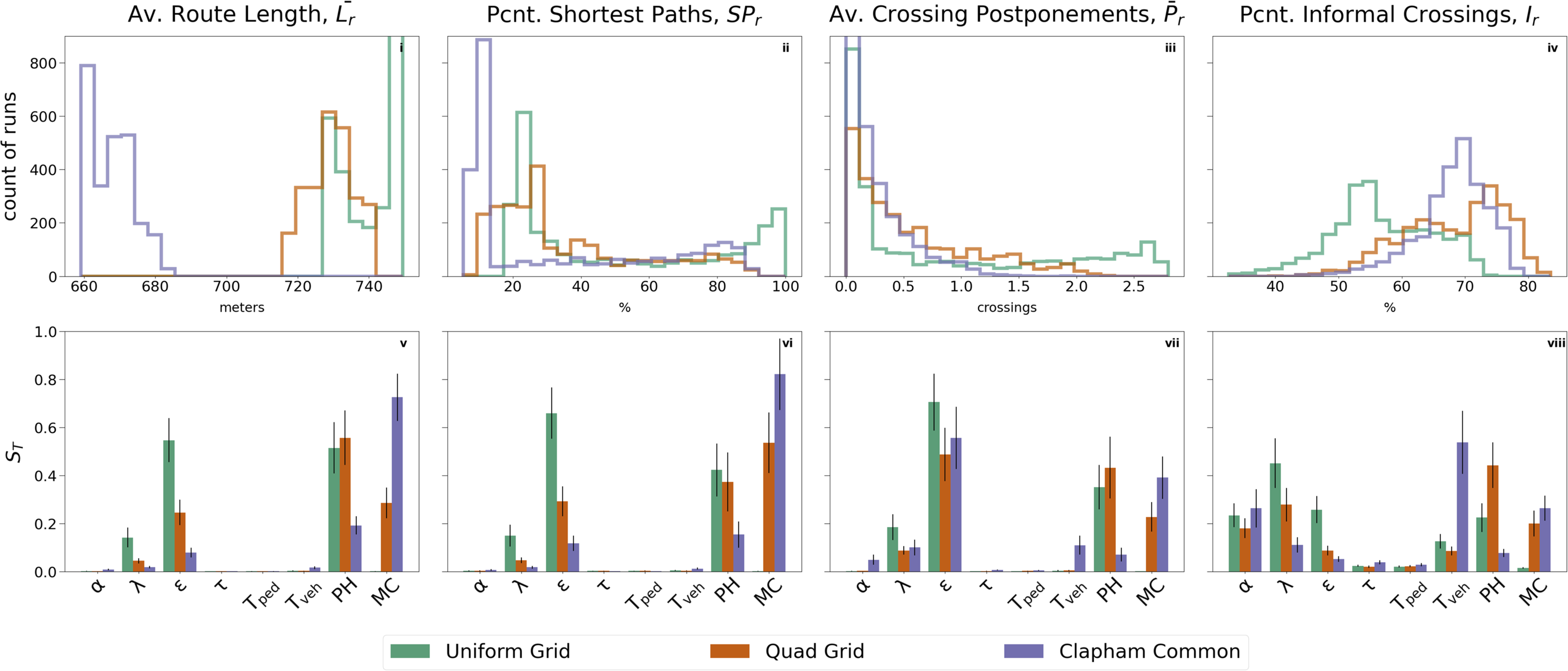
Across all environments and output metrics, parameters
Route length
Routes are typically longest in the Quad Grid environment and shortest in the Clapham Common environment.
Shortest path similarity
As with
Crossing behaviour
The distribution of
The results for
Least cost model comparison
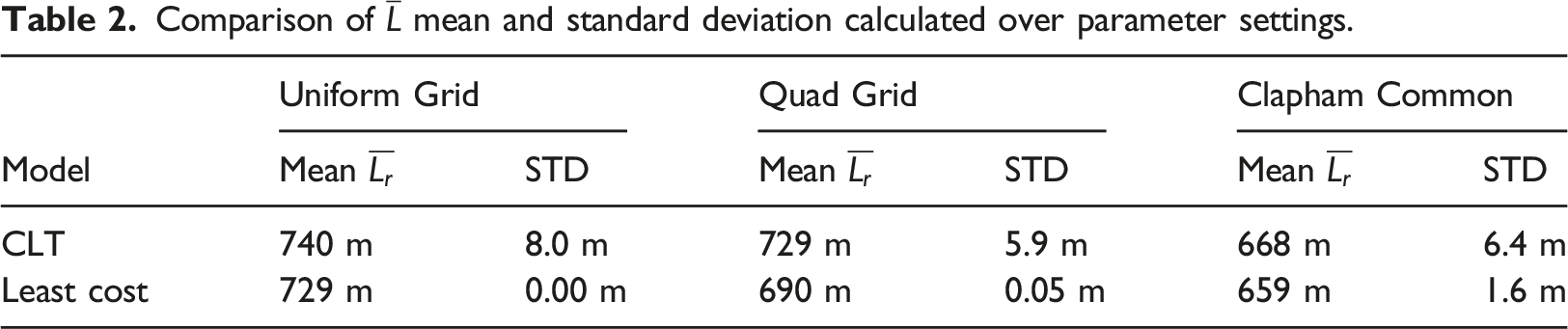
Comparison of
Discussion
The results of the GSA show that the model is able to produce a wide variety of pedestrian trajectories spanning an urban neighbourhood. Additionally, integrating street-level and neighbourhood-level decisions reveals multi-scale influences on road crossing behaviour.
The distribution of
Furthermore, the hierarchical CLT model is able to produce a broader set of routes than the least cost model. Table 2 shows that the standard deviation of
The model also produces a broad set of street-level trajectories. The range of
Integrating street- and neighbourhood-level navigation decisions into a single modelling framework has enabled the effects of decision making at each of these scales to be compared. Metrics
The model also produces interaction from upper- to lower-level decision making. This is most clearly demonstrated by
Comparisons between road network environments reveal how components of the CLT model are dependent on the environment.
Additionally,
Another notable difference between environments is the greater sensitivity of output metrics to
This assessment of how the environment, comprising a road network and crossing infrastructure, affects pedestrian agent behaviour could be developed in several ways. Repeating these simulation experiments for a larger sample of real road networks, ranging from highly ordered to highly disordered (Boeing, 2019), would provide a better test of whether and how road crossing behaviour could be shaped by network morphology. Future work could also consider multiple arrangements of crossing infrastructure per road network environment to distinguish the effects of morphology and crossing availability, which could have direct policy relevance to the (re)design of city streets.
A related limitation is that all pedestrian trips are to a single, central destination producing unidirectional pedestrian flows whilst bidirectional pedestrian flows are important in other settings (Helbing et al., 2001). We performed an additional simulation experiment in the Clapham Common environment with N = 600 pedestrian trips travelling both to and from the underground station. We found no material difference in the sensitivity indices of each model parameter, confirming that in these simulations bidirectional pedestrian flows do not affect route choices (see Figure S8). Nonetheless, simulating more realistic pedestrian trips would improve the relevance to real transport systems. Scaling up simulations to better approximate real trips may require simplifying components of the model to reduce computational complexity (the most computationally expensive component is the ‘cognitive heuristic’ pedestrian movement model followed by the sequential sampling crossing location choice model).
Further investigations could address some of the modelling assumptions that are not formally parameterised and accounted for in the GSA. For example, different formulations of crossing alternative choice sets and upper-level route choice heuristics are possible. A more parsimonious model is also possible, given that parameters
By addressing these limitations, the CLT route choice framework could be used for a more granular appraisal of traffic management and urban design. Previous studies have identified the importance of street design to pedestrian route choice (López-Lambas et al., 2021), and these could be extended to incorporate the way design mediates dynamic interactions between road users. Similarly, walkability (Talen and Koschinsky, 2013) and pedestrian quality-of-service (Macdonald et al., 2018; Anciaes and Jones, 2016) analysis could be extended to account for a broader set of possible pedestrian trajectories that are responsive to the movements of other road users.
Conclusion
A novel CLT-based framework for modelling pedestrian movement and its implementation in a spatial ABM is presented. The framework builds upon existing research on pedestrian navigation and movement in cities by integrating decisions pertaining to street-level movement with decisions pertaining to navigating the local neighbourhood. CLT is identified as a suitable psychological theory for structuring these multi-scale decisions which are modelled using heuristics and sequential sampling methods. By performing multiple simulation runs in three environments, the route choice and road crossing behaviour the CLT route choice framework produces was explored. The results show that movement at both the neighbourhood and street level is affected by decision making at both scales. Additionally, the pedestrian trajectories produced by the model are more varied than a comparative least cost network model with variable link weights; both at the street level where agents move in a continuous space and at the neighbourhood level where agents choose paths on a pavement network. Modelling pedestrian movement in this way could support more detailed assessments of pedestrian walking experience in cities by integrating granular movement and road user interactions with larger scale patterns of movement driven by activities and locations.
Supplemental Material
Supplemental Material - Neighbourhood-level pedestrian navigation using the construal level theory
Supplemental Material for Neighbourhood-level pedestrian navigation using the construal level theory by Obi Thompson Sargoni and Ed Manley in Environment and Planning B: Urban Analytics and City Science.
Footnotes
Acknowledgements
We would like to thank Gustav Markkula and Kai Tian for helpful discussions, the reviewers for their constructive feedback, and EPSRC for funding this work.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Engineering and Physical Sciences Research Council.
Supplemental Material
Supplemental Material for this article is available online.
Author biographies
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.