
Abstract
Pedestrian route choice, wayfinding behaviour and movement pattern research rely on objective spatial configuration model and analysis. In 3D indoor and outdoor multi-level buildings and urban built environments (IO-ML-BE), spatial configuration analysis allows to quantify and control for route choice and wayfinding complexity/difficulty. Our contribution is to compare the interaction of the level of definition (LOD) of indoor and outdoor multi-level pedestrian network spatial models and complexity metric analyses. Most studies are indoor or outdoor and oversimplify multi-level vertical connections. Using a novel open data set of a large-scale 3D centreline pedestrian network which implement transport geography 2D data model principles in 3D, nine spatial models and twelve spatial complexity analyses of a large-scale 3D IO-ML-BE are empirically tested with observed pedestrian movement patterns (N = 17,307). Bivariate regression analyses show that the association with movement pattern increases steadily from R2 ≈ 0.29 to 0.56 (space syntax, 2.5D) and from R2 ≈ 0.54 to 0.72 (3D sDNA) as the 3D transport geography spatial model LOD and completeness increases. A multivariate stepwise regression analysis tests the bi-variate findings. A novel 3D hybrid angular-Euclidean analysis was tested for the objective description of 3D multi-level IO-ML-BE route choice and wayfinding complexity. The results suggest that pedestrian route choice, wayfinding and movement pattern analysis and prediction research in a multi-level IO-ML-BE should use high-definition 3D transport geography network spatial model and include interdependent outdoor and indoor spaces with detailed vertical transitions.
Introduction
During walking navigation and wayfinding, cognitive spatial model of the Built Environment (BE), stored information, relative knowledge relation and spatial feature attributes are continuously updated (Montello, 2005). Various spatial models and metrics (Boeing, 2019; Coutrot, et al., 2020) are used, such as orientation, configuration and entropy, to objectively characterize BE spatial route choice complexity and wayfinding, linking objective measures of space to cognition and action (Zimring and Dalton, 2003). This study focuses on network-based objective spatial models and analyses of BE layout complexity used in 3D indoor and outdoor multi-level BE for pedestrian movement pattern prediction, wayfinding and route choice studies.
Navigating across 3D large-scale IO-ML-BE is a complex process involving both locomotion and wayfinding component (Millonig and Schechtner, 2007). In such environments, people move between indoor and outdoor, through transitional space that can be below ground, at ground (e.g. atrium, arcade and shopping mall), and/or above ground, in outdoor, or semi-outdoor covered walkway and skywalk. Categorizing such spaces requires a new classification (Yan, et al., 2019, 2021). Multi-level indoor often differ in structure, they are spatially more compressed, and how people perceive and move between different floors, use vertical mode of transition (lift, escalator, stair, ramp and stairs) (Kondyli and Bhatt, 2018) that are often designed and integrated as landmarks. This is not usually the case for urban outdoor space. Landmarks in outdoor environment are different than those in indoor spaces. They contrast by the extent of the field of view, shorter indoor and longer outdoor. Outdoor also allows for the use of cardinal points or far away landscape features to orientate which mostly will be unavailable while indoor. Some outdoor space also combines lift, escalator, travelator, stair, ramp, stairs and slope. For example, in Hong Kong, the Central business district includes an entanglement of large-scale vertical and horizontal traversable mixed-use buildings, at ground, above and below ground, indoor and outdoor, public and private realms including a succession of large atriums and a range of seamlessly functioning vertical transitions (Table ST1) also linked to mass-transit stations. The specificity of such intense public transport and pedestrian transport-oriented developments is an emerging worldwide urban phenomenon called volumetric urbanism (Cui, et al., 2013, 2015; Cho, et al., 2015; Harris, 2015; Shelton, et al., 2011; McNeill, 2019; Yoos and James, 2016; Mangin, et al., 2016). The complexity of these urban structures to a large part determines the complexity of wayfinding (Richter K, 2009) for millions of people daily. However, research still lacks appropriate 3D spatial model and analysis of such complex configurations (Hölscher, et al., 2013; Kuliga, et al., 2019; Vanclooster and De Maeyer, 2012). In such settings, it is difficult to divide urban space into outdoor and indoor. As an experience, it is a continuous and variegated cognitive-visual-locomotive experience. Kondyli and Bhatt (2018) argue that navigating routes within 3D large-scale mixed indoor and outdoor environment is a significant challenge because such highly mixed structures are much larger than the sensorial horizon of a user with high potential for perception misalignment and distortions of spatial models which probably differ from the micro-scale focus of indoor research found in the evacuation management literature (Zhou, et al., 2015) or the limited scale of building wayfinding research (Hölscher, et al., 2013; Kuliga, et al., 2019) or the unmixed outdoor investigation (Hölscher, et al., 2011).
Navigation guidance aids system has been developing much faster for outdoor than they have for indoor (Vanclooster and De Maeyer, 2012) with key issues of lack of details, and routing algorithm, mostly using Euclidean shortest path routing. Thus, ignoring pedestrian route choice cognitive preference such as least turn (Vanclooster, et al., 2014), least angular/vector (Hillier and Iida, 2005; Bongiorno, et al., 2021) or hybrid, that is, most direct and shortest (Shatu, et al., 2019). Complex-mixed BEs remain a challenge for GPS due to the complexity of accurate and seamless location positioning (Xu, et al., 2020) across multi-level indoor and outdoor, and rich topography (Sun, et al., 2019).
The recent availability of a unique large-scale open data 3D indoor and outdoor centreline pedestrian network (3DPN thereafter) (HKSAR LandsD, 2020) that has been integrated into a multimodal navigation app (HKSAR BD, 2020) using the shortest Euclidean routing and associated with a range of 3D Models (HKSAR PlanD, 2018) and topographic map makes possible to contribute to the literature by: • proposing and implementing several 3D analytical and visualization techniques to support the spatial cognitive complexity analysis of an implemented 3D indoor and outdoor multi-level navigation pedestrian network (3DPN). • testing empirically whether a 3D angular complexity analysis can predict pedestrian volume patterns in the 3DPN. To date, 3D turn (topological distance), and angular (least angular change/vector) analysis have not been used to account for large-scale 3DPN spatial cognitive volumetric complexity. • testing a 3D hybrid metric (Euclidean + angular), that is, shortest, and most direct (least angular change). • testing an enhanced version of the 3DPN by increasing indoor pedestrian network LOD. • comparing with network-based 2.5 topological analysis (Lee, 2004; Dao and Thill, 2018) and specifically space syntax spatial model, 2.5D axial line network, axial segment (Chang and Penn, 1998; Hillier and Iida, 2005) that emulate the 3DPN, to investigate whether such spatial model is necessary for automatically and meaningfully calculate turn and angular complexity and their impact on association with movement pattern, route choice and wayfinding studies. • Test empirically ‘inherent intelligibility’ as predictability indicator (Penn, 2003: p. 37 & 45) which has been shown to be morphologically inconsistent (Zhang, et al., 2013).
In short, do we need a different spatial model for 3D navigation and complexity perception analysis, or can the same 3D transport geography spatial model be used for both?
Review of relevant studies
Space syntax is a 2D network-based configurational analysis of building and urban morphology complexity (Rashid, 2019). There are three prevailing motivations for using space syntax to analyse the impact of BE spatial structure complexity on movement pattern, navigation and wayfinding (Penn, 2003; Hillier, 1999; Zimring and Dalton, 2003; Hölscher, et al., 2012; Kuliga, et al., 2019; Carlson, et al., 2010): 1 Spatial linear model: the axial line and its spatial disaggregation/derivation into segment spatial model representing line of sight/movement, from which quantitative layout complexity measures such as topological 2D and 2.5D distance analysis are derived - axial map based least turn distance between Origin and Destination axial line pairs (Bafna, 2003; Haq and Zimring, 2003; Kuliga, et al., 2019). The more recent segment map and software also enables separate analysis of angular distance and Euclidean distance, repestively least angular distance and shortest path between OD segment pairs) (Hillier and Iida, 2005). 2 From the linear spatial model, 2D and 2.5D quantitative configurational analyses, also called syntactical analysis, of the spatial model have high association with the aggregate movement rates of pedestrians and vehicles, route choice and wayfinding decisions, and wayfinders’ understanding of the spatial environment (Kuliga, et al., 2019), with unexplained variances often being associated with individual differences (Penn, 2003). 3 An ‘inherent intelligibility’ indicator based on axial line spatial model, as a ‘local area effect’. The high/low measure of the ‘inherent intelligibility’ (Penn, 2003: p. 37 & 45; Li and Klippel, 2016) of a spatial configuration is used as a predictor/explanation of the strong/weak association of syntactical analysis with movement rates in intelligible/’unintelligible’, 2D and 3D BE (Chang and Penn, 1998; Penn, 2003).
For a recent, extensive review and contextualization of the concepts, methods, and analyses of space syntax, see Rashid (2019) and Oliveira (2016).
Spatial linear model – Axial line, segment line and evolution to 3D
The axial line spatial model, as the ‘the fewest and longest line’ covering network with topological analysis, is one of the original techniques of space syntax (Hillier and Hanson, 1984: p. 91). It was developed to describe and characterize buildings and settlements and enable the explicit measurement of spatial configuration simplicity/complexity (Hillier, 1996; Hanson, 1998). Axial line spatial models have been used to model street layouts, 2D outdoor BEs, 2D pedestrian paths and 2.5D multi-level indoor buildings (Chang and Penn, 1998; Hölscher, et al., 2006, 2011, 2012). Early criticism of this spatial model (Jiang and Claramunt, 2002; Ratti, 2004; Salheen and Forsyth, 2001) pointed out the relatively subjective nature of the encoding process, solution (Batty, 2004; Turner, et al., 2005), the lack of geometric, scale, and Euclidean considerations, the aggregated nature of the spatial model, the two-dimensionality (Pafka, et al., 2020), and the under-determination of the axial line as the ‘line of sight’ and/or line of movement (Marshall, 2005: p. 115; Pafka, et al., 2020).
Geometry, scale and metrical considerations, line of movement, line of sight
At the core of layout, complexity measurement is the idea that the BE can be understood as a network of interconnected units. Complexity, initially conceptualized as a topological property of axial line and how axial line as spatial units of analysis are interconnected to each other, has evolved with the segment map, angular analysis and Euclidean radius creating geometric relationship with Euclidean metric conditioning in 2D and 2.5D. The combination of the segment map as a street spatial model and the use of angular analytics and Euclidean radius has shown a higher level of association with pedestrian and vehicular flow (Hillier and Iida, 2005; Hillier, 2012). Axial and segment spatial models have been equally used (Sharmin and Kamruzzaman, 2018). A first hypothesis (H1) is that, given an operationalizable 3D spatial model, the Euclidean conditioned angular analysis can be extended to 3D although with a remaining under-determination of Euclidean properties.
The connectivity and continuity of the line of movement are entangled with sight, spatial cognition and wayfinding heuristics but this does not necessarily equate ‘axial line’ with line of sight (Marshall, 2005; Figueiredo et al., 2005). It is hypothesized (H2) as suggested by (Chang and Penn, 1998) and Turner (2007) that the centreline, the line of movement, is a valid spatial model/generalization of line of sight for pedestrian.
Spatial aggregated nature of the axial/segment line spatial model of pedestrian path
Desyllas and Duxbury (2001), observing different pedestrian flow patterns on two sides of the street, proposed encoding the two sides of the street and crossings as opposed to aggregated encodings, such as axial lines or segment encoding, that generalize the pedestrian paths of the two sides of street into one single line from which segment are also derived. Visual Graph Analysis (VGA) (Desyllas, et al., 2003; Turner, et al., 2001) was shown to be effective at systematically capturing two sides of the street, pedestrian crossing configurations and showing high association with pedestrian flow. However, empirical VGA and two-sided pedestrian network studies are scarce. A hypothesis (H3) is to extend the principle of the road centreline 2D spatial model to detailed, two sides of the street, pedestrian path encoding. This is extending to pedestrian network, the standard road centreline network linear referencing system used in transport geography (Figure S01:a), and in transport (Garrison and Marble, 1962; Haggett and Chorley, 1969; ISO, 2011; FHWA, 2014; Marshall, 2016; Marshall, et al., 2018). These spatial models differ from that used by Turner (2007) which decompose a curve into series of short straight segments (Figure S02:b), instead, the curved link between two junctions is one spatial unit (Figure S01:a). Alternatively, angular analysis is operationalized as angular change along a medial/centreline path, calculated cumulatively along straight and curve links and through junctions (Cooper & Chiaradia, 2020).
The encoding principle follows a medial/centreline path of the pedestrian network on both sides of the street and the crossings (Figure S01:b). This principle also follows pedestrian path encoding, not implemented in space syntax, proposed by Chang and Penn (1998, p. 525) (Figure S03). Extending this encoding principle from indoor to outdoor should overcome the inconsistencies arising with VGA (Ericson et al., 2020; Zhang et al., 2013) and the criticism of axial or segment line spatial model aggregation (Pafka, et al., 2020).
From 2D to 2.5D the axial/segment line to 3D
Chang and Penn (1998) and others (Kuliga, et al., 2019; Chang, 2002; Lu and Ye, 2017; Hölscher, et al., 2006, 2012) have highlighted the important role of vertical transition in navigation. There are calls for better encoding of vertical transition configurations to better understand their roles in multi-level navigation and wayfinding (Hölscher, et al., 2013; Lu and Ye, 2017; Montello, 2007). Two strands of space syntax extensions to 3D have been proposed, a network and an isovist/visual graph approach (see Table ST2 for a literature review summary). The 3D space syntax extensions have been recently reviewed (Rashid, 2019). These 3D space syntax extensions, for example, quantify urban visibility using 3D axial lines and height changes. None of these extensions have been empirically tested and operationalized in movement patterns or wayfinding analysis.
Indoor and outdoor multi-level pedestrian movement, route choice and wayfinding studies (Kuliga, et al., 2019; Chang and Penn, 1998; Hölscher, et al., 2012) using space syntax resort to an oversimplified linear spatial model of vertical transition configurations flattened on a plane, using an additional axial line to encode connection between floors. This is, at most, a 2.5D spatial model. The 2.5D limitation makes it extremely difficult to operationalize this spatial model for multi-level urban area that combines indoor and outdoor publicly accessible paths, such as in Chang and Penn (1998) where key publicly accessible indoor floors were omitted. We hypothesize (H4) that these omissions impact negatively on movement patterns, route choice and wayfinding analysis.
In spatial cognition and wayfinding studies, several aspects are contested such as whether cognitive maps are mainly 2D, or 3D (Kim, et al., 2017), whether or not users expect identical floor layouts in multi-level buildings (Carlson, et al., 2010; Hölscher, et al., 2006, 2012). Lu and Ye’s wayfinding study (2017), in agreement with Berthoz and Thibault (2013; Thibault, et al., 2013), suggested that in multi-level buildings, people can integrate volumetric cognitive map and that the previous findings might be limited by the specific wayfinding task protocol used. To contribute to this debate meaningfully (Hinterecker, et al., 2018; Grieves, et al., 2020; (Gath-Morad et al., 2021)), the 2D hybrid spatial model (Figure S01: c & d) proposed by Cooper et al. (2019) is implemented in 3D to encode topography, lift, stairway, ramp, or escalator, combining horizontal and vertical curvilinearity as shown in Figure 1 (Cooper and Chiaradia, 2020). These 3D encoding principles are major changes from the space syntax 2.5D linear network-based configurational approach to a complex 3D multi-level IO-ML-BE spatial structure. This 3D spatial model provides objective measures of body rotation between floors and level of correspondence floor by floor and across floors. All nodes are also decision points which is not the case in Turner (2007) (See Figure S02a), which can adversely impact route choice and wayfinding research. Pedestrian network encoding in 2D vs 3D: (a) 2D road centreline encoding and angular analysis principle (Turner, 2007) and (b) 3D medial centre path encoding and 3D angular analysis principle (Cooper and Chiaradia, 2020).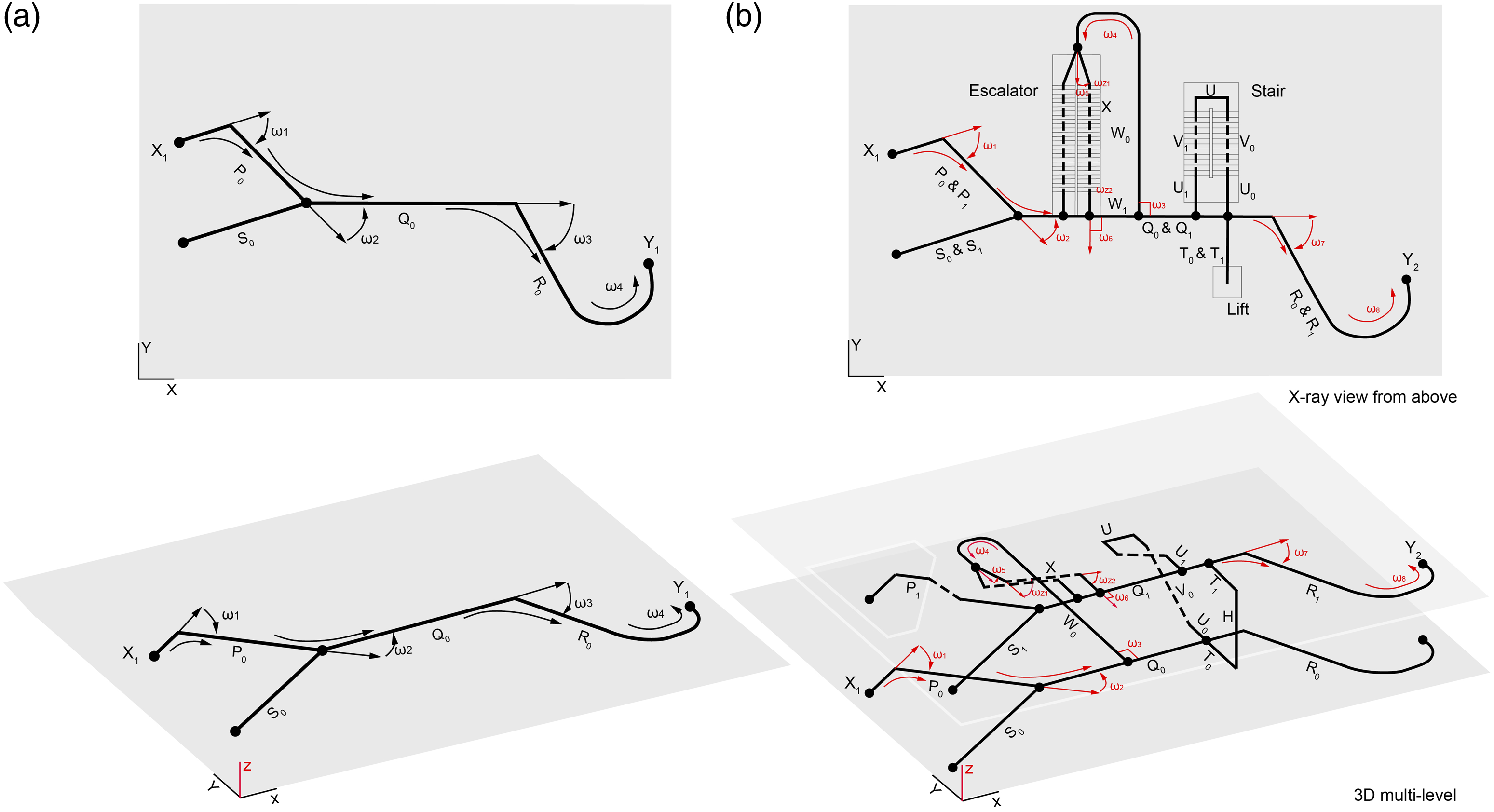
Associations with pedestrian movement, cycling and vehicular movement patterns
The strong association with aggregate observed pedestrian and vehicular movement distribution is a key motivation for route choice and wayfinding studies to use space syntax (Penn, 2003; Kuliga, et al., 2019; Farr, et al., 2012).
The strong associations (60–80% of the variances) between layout configuration complexity analysis and aggregate movement patterns provide no direct understanding of individual cognitive processes, route choice and wayfinding. It is theorized that spatial cognition and navigational expertise, whether as walking, cycling or driving, elicit the deployment of cognitive processes, route choice and wayfinding heuristics that are also dependent on layout complexity (Woollett and Maguire, 2011; Penn, 2003; Hölscher, et al., 2012; Hillier and Iida, 2005). We hypothesize (H5) that the same configurational analysis using a different 2D spatial model, presenting similar strong associations with movement rates, is a plausible candidate to objectively describe BE complexity for wayfinding studies (Kang, 2017; Cooper and Chiaradia, 2015; Cooper, 2017, 2018; Wedderburn and Chiaradia, 2014; Jayasinghe, et al., 2019). Cooper et al. (2019), in the first longitudinal study, showed that the use of the proposed alternative spatial model enables predictive pedestrian movement before and after a major configuration change in a city centre.
‘Inherent’ intelligibility/unintelligibility versus individual and cultural adaptation?
Hillier (1996) conjectured the concept of intelligibility as related to the ability to make inferences ‘in which a picture of the whole urban system can be built up from its parts, and more specifically, from moving around from one part to another’, that is, inferences beyond visual local cues. Intelligibility/unintelligibility are operationalized as an index, the high-association/low-association between local measure of Connectivity/Degree of axial line and Integration/Closeness of the whole system. The concept of ‘inherent intelligibility/unintelligibility’ and their relation to wayfinding ease is a widespread area of interest in the literature (Penn, 2003; Dalton, et al., 2015; Haq, 2003) which is expanding (Zhou et al., 2021). Legibility of an environment (Lynch, 1960; Weisman, 1981), the ease with which an urban structure can be comprehended and intelligibility have been shown to be related (Long and Baran, 2012). A metric of legibility includes the connectivity metric of layout, as interconnection density (O'Neill, 1991) which is fraught with the Modifiable Area Unit Problem (MAUP) and other issues (Stangl, 2019). High/low intelligibility is used as a predictor of the (high/low) association between space syntax spatial complexity analysis, wayfinding task difficulty and pedestrian movement patterns (Penn, 2003). Chang and Penn (1998) analysed 3D multi-level configurations that were found unintelligible thus explaining the poor association between pedestrian movement patterns and space syntax axial line analysis. However, despite formal confounding issues with the operationalization of an intelligibility index (Zhang, et al., 2013; Long and Baran, 2012), it appears that the spatial model and analysis used play an unaccounted major role in the level of association with the pedestrian movement pattern. Hillier and Iida (2005) show that the changes from axial line to the derived segment line spatial model and from topological to angular analyses vary the association with the pedestrian movement rate from −13% to +54% without change of configuration, or in the ‘inherent intelligibility’ index. These variations cast doubts on the robustness and reliability of space syntax’s ‘inherent intelligibility’ index.
The large-scale navigability ability study of Coutrot et al. (2020) indicates that cognitive abilities for spatial navigation are clustered globally according to economic wealth and gender. Also, growing up in a city with a ‘complex’ layout positively impacts navigational skills. These studies suggest that intelligibility will vary not only with inter-individual but also with cross-cultural differences. These findings further problematize the construct of ‘inherent intelligibility’ (Penn, 2003) and suggest both individual and dynamic cultural unaccounted variations. Thus, an ‘unintelligible’ layout in London might be nevertheless intelligible elsewhere.
In summary, this study hypothesizes that by using 3D transport geography, path centreline for pedestrian spatial model with higher LOD and completeness, using the association with pedestrian movement patterns as control, we would find a higher association in large-scale IO-ML-BE, see Supplementary materials for complete details.
Datasets and methods
Case study selection
As Chang and Penn (1998) use the exceptional South Bank and Barbican as critical case studies in London, similarly, we implement a critical case selection and research strategy (Flyvbjerg, 2001). The case is selected on the base of expected content (see S04): an exceptional study area with inherent intelligibility close to zero, as in Chang and Penn, using the same spatial modelling, the axial line and other spatial model, we are expecting low predictability of pedestrian flow patterns. By showing that the predictability of pedestrian flow is high would permit us to conclude that if ‘inherent’ intelligibility/unintelligibility” is not valid for this case, then it applies to all the cases (Flyvbjerg, 2001: p. 79).
The study area
With over 7.4 million people and a built-up land area covering approximately 25% of its territory, Hong Kong has one of the highest population densities in the world. Walking is the main way of moving between public transport modes which has 90% transport modes share. Hong Kong has adapted walking to a typhoon-prone, sub-tropical climate and the city’s rich topography. It has evolved into a complex volumetric mode of development (Shelton, et al., 2011), broadly defined as integrating multiple modes of transport with vertically stacked mixed-use, and integrated horizontally through walking below, at ground and above ground, combining outdoors and indoors, and mingling public, quasi-public and private ownerships that are publicly accessible and seamless. These configurations often result in segregation between pedestrian and motorized vehicle. Such urban development can be found in other cities around mass-transit urban rail stations (Yoos and James, 2016; Mangin, et al., 2016; Samant, 2019; Chang and Penn, 1998).
The study area is defined as an 800 m catchment area (2.2 × 1.6 km) from the entrances/exits of two linked mass-transit stations: Central and Hong Kong. It excludes the inner-urban rail station’s paying area. Workplace density ranges from 1,140 to 2,990 jobs/ha, while the residential density range from 12 to 465 person/ha. These differentiated ranges, between jobs and resident, are a typical morphological signature of Central Business District and implies that most users are familiar with the IO-ML-BE configuration. The study area also attracts many tourists who might mostly be first-time visitors. The overall area and the study area have ‘inherent intelligibility’ that are very low (Figures S05a, b, c).
3D pedestrian network – Study area
The 3D indoor and outdoor multi-level pedestrian network (3DPN) is extracted from the open data set provided by HKSAR LandsD (2020). An overview of the data model is provided in S06 (Figure S06). The 3DPN spatial model follows Figure 1(b) pedestrian path centreline encoding principles.
In the study area, the multi-level outdoor covered walkway network is 7.8 km long. It was developed piecemeal by various private developers and the Hong Kong Government since the 1970s (Tan and Xue, 2014). This 3D multi-level pedestrian network extends horizontally indoor connecting via multiple access to 70 traversable buildings as a combination of underground-ground, or ground and above ground or underground-ground and above ground. The 3DPN plays an essential role in connecting dense, multi-level, publicly accessible mixed-use areas (Figure S07). This very complex urban environment has attracted various descriptive studies (Frampton, et al., 2012; Xue, 2016; Sun, et al., 2019; Zhao, et al., 2020).
Pedestrian data collection
Pedestrian movement pattern data was gathered in the Central area as a dependent variable and used as a quantitative control test for the analysis of objective IO-ML-BE spatial models analyses as independent variables. The ‘Cordon Count’ method of observation was used for gathering pedestrian volume data (S08). Table ST3 shows the descriptive statistics for all 33 observed cordon counts and Figure S08:a shows the cordon count location. Figure S08:b presents the associations between all-day average flow rates and each period. The average of six time periods throughout the day is a good representation of each period. We also varied the pedestrian survey methods using one weekday video survey and 3 days video survey to further ascertain the robustness of the findings. The results hold, see details in S09 (Figure S09a, b).
Pedestrian network spatial models
In this study, a standard-mixed axial line spatial model and four spatial models are compared with different levels of 3D definition and completeness. The 3DPN has a simplified pedestrian indoor network (PIN) which is used to make spatial models comparable, yielding nine spatial models. Detailed descriptions are given in S11 (Figure S11a, b, c, d) with a graphic summary. For the standard-mixed axial line spatial model, see Chang and Penn (1998) and S10 (Figure S10).
Table ST4 compares the descriptive statistics of the axial, segment, 3D outdoor path-centre line and complete 3D indoor-outdoor path-centre line maps.
Analytical metrics: Centrality independent variables and software
Two measures of pedestrian network complexity-accessibility and flow potential are used in this study: closeness and betweenness centrality (Hillier and Iida, 2005; Cooper and Chiaradia, 2020). In space syntax software, closeness centrality is called ‘integration’ or ‘mean depth’, and betweenness centrality is called ‘choice’ (Hillier and Hanson, 1984).
Hybrid distance metric
sDNA as DepthmapX software operationalises analytical metrics such as angular (most direct path), Euclidean (shortest path) and topological (least turn path). sDNA provides a novel 3D ‘hybrid’ metric (shortest and most direct). In a recent study, Bongiorno, et al. (2021) reported that pedestrians between Origin-Destination tend to minimize the horizontal directional changes (least angular/vector) and Shatu et al. (2019) reported path length reduction where possible: 28% of the chosen routes satisfied both shortest distance and most direct criteria. Berthoz et al., 1999 indicated that distance and direction might be encoded separately in human cognition yet interacting (Zhang, et al., 2015). sDNA allows the mixing of both the shortest and least angular/vector changes in one metric to explore relative interaction. The hybrid distance metric is defined along the link in equation (1) and for the junction in equation (Equation 2)


Results
To test the relationship between spatial models at different radii and observed average daily pedestrian movement, a bivariate regression analysis was adopted for all the spatial models. The highest R-square values between pedestrian movement pattern distribution and centrality measures are shown in Table ST5 and all results are shown in S13 (Figure S13a, b, c).
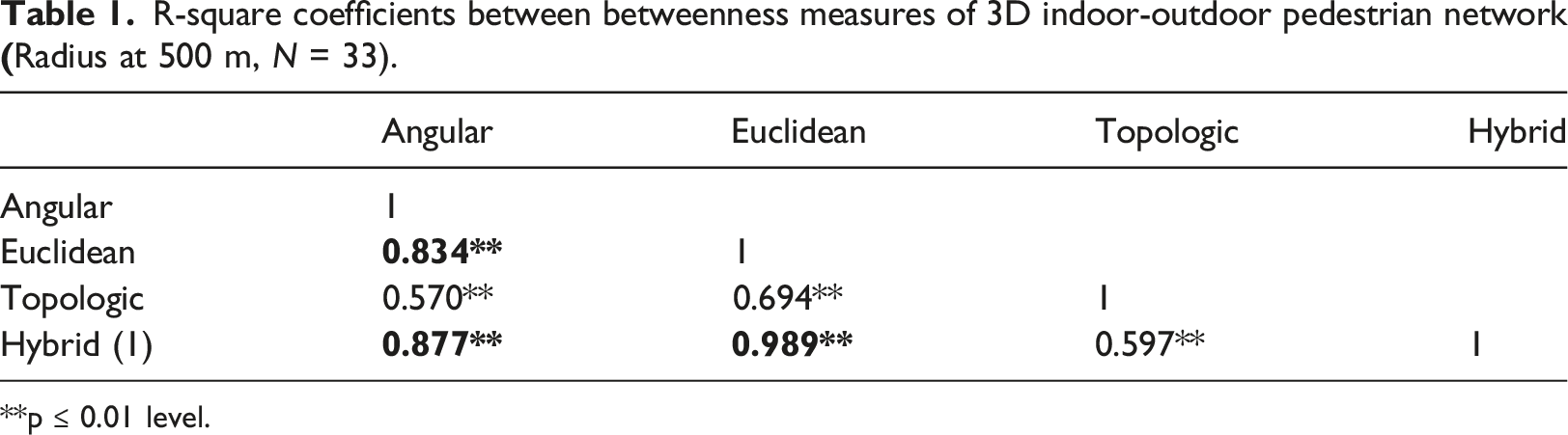
The results show that: 1. The measure of layout complexity’s association with pedestrian movement pattern in volumetric BE is significantly affected by the choice of pedestrian network spatial model (2.5D space syntax vs 3D transport geography) and its LOD and completeness. (See S14 for detailed descriptions). 2. Coefficient of determinations increase steadily from R2 ≈ 0.29 to 0.56 (space syntax, 2D to 2.5D syntactical analysis) and from R2 ≈ 0.54 to 0.72 for the 3D transport geography spatial model (3D sDNA), as LOD and completeness of the 3DPN increases to higher level (Table ST5). 3. To test the impact of the pedestrian survey method, a video survey with N = 293,625 was used and gives similar results (S09). 4. To test the strength of the bi-variate findings, a multivariate stepwise regression analysis was executed with independent variables such as ambient volumetric density as proxy for office workplace density (Figure S15); diversity as shopping mall egress; design such as pathway width, ambient network density, ambient junction density within 500m, footbridge; distance to transit such as closest mass-transit egress S15. Model summary, Table ST6, shows that Distance to transit egress and hybrid closeness enter the model with an adjusted R2 ≈0.78. 5. Table 1 shows the strong cross-associations among four 3D metrics of betweenness measures for the complete 3D indoor & outdoor, 2 side path-centre line spatial models. The results demonstrate that the hybrid metric that combines angular and Euclidean, enables a better understanding of the interactions between shortest paths and least angular/vector paths. R-square coefficients between betweenness measures of 3D indoor-outdoor pedestrian network **p ≤ 0.01 level.
Discussion and conclusion
In this study, we show for the first time how 3D least angular change centrality analysis, as an objective measure of pedestrian layout complexity and index of route choice and wayfinding difficulty (Carlson, et al., 2010), can be innovatively and effectively deployed in 3D (H1). This is achieved by using a 3D transport geography spatial model (H2 and H5) that extend the principles of the 2D road centreline spatial model to 3D, disaggregated two sides of the street, and crossing pedestrian path encoding (H3) with network-based geometric details of vertical transitions, and this in a topographically rich study area with extensive complex multi-level outdoor and indoor pedestrian paths, that is, in volumetric urbanism (Shelton, et al., 2011; McNeill, 2019).
The key innovation is that a link, as a spatial unit of analysis between two junctions (Figure 1), combines horizontal and vertical curvilinearity to account for vertical transition, making the spatial model truly 3D. The results also show that the omission of interdependent indoor publicly accessibly multi-level pedestrian paths impacts negatively on association with movement patterns (H4), by almost halving the level of association (Table ST5).
The 3D transport geography spatial models and their analysis still stress the importance of configuration, geometry, Euclidean distance and enable the measure of complexity, degree of correspondence, direct measure of rotation or overlap between floor-to-floor plans (Carlson, et al., 2010; Kondyli and Bhatt, 2018). The operationalization of a novel closeness and betweenness 3D hybrid analysis, combining the 3D angular and Euclidean, conditioned by the 3D Euclidean radius, shows promising results that corroborate existing route choices studies (Shatu, et al., 2019; Bongiorno, et al., 2021). Our findings align with previous studies that have shown how spatial model selection can greatly impacts results (Hillier and Iida, 2005; Turner, 2007; Zandbergen, et al., 2011; Chrisman, 1991; Fotheringham and Wong, 1991).
In empirical studies of Barbican and South Bank in London, Chang and Penn (1998) attributed negligible associations between the logarithm of pedestrian movement rates and integration values to the weak association between local and global measures, or the lack of ‘inherent intelligibility’ of the BE. In Hong Kong, Central, despite null ‘inherent intelligibility’ (Figures S05a, b, c), the space syntax 2.5D spatial models’ association with pedestrian movement pattern were moderately high in contrast to very low in a previous study in London (Chang and Penn, 1998). All the spatial models’ predictability ranges from moderately high for space syntax (2.5D), to high for 3D transport geography spatial model with high LOD. The predictability of a system is not related to its ‘inherent intelligibility’, thus not only ‘inherent intelligibility’ has formal issues (Zhang, et al., 2013) but also seems not supported by empirical results (See S16 for the discussion of an alternative model of intelligibility).
Given the high level of 3D complexity of the study area and the high association with movement patterns, following the findings of Coutrot et al. (2020) we may conjecture of a local spatial culture effect which problematize direct comparison and/or ‘best practice’ direct import between different spatial cognition cultures. In that sense, the comparison of pedestrian patterns in New York, Manhattan and Hong Kong, because they have similar densities is not warranted given their spatial cognition culture differences: flat regular grid versus topography rich, deformed grid and multi-level confound route choice study (Guo and Loo, 2013), and casts doubt on Euclidean distance only based walkability scoring and accessibility assessment (Zhao, et al., 2020; Tang, et al., 2021). The globalization of designers, researchers and policymakers accustomed to liberal borrowing need to be challenged and require better understanding of the interplay of individual difference and the evolving plasticity or not of spatial cognition culture(s).
Volumetric urbanism, transport-oriented development and large-scale 3D IO-ML-BE create new cognitive, wayfinding, urban design and planning challenges due to their spatial scale, and their outdoor-indoor heterogeneity and complexity. These complexities can increase from incremental additive development over time, such as in Central, Hong Kong, or in ‘all at once’ design, for example, in Sha Tin, Hong Kong or the Barbican in London. This study’s results suggest that large-scale complex IO-ML-BE design can be analysed and informed by 3D analysis using 3D transport geography spatial model. Such spatial models also support the inclusion of a wide varieties of attributes to characterize what is along of beside the walking path. They also enable linear referencing of semantic attributes along movement lines or other BE attributes in 3D.
There are several limitations to this study. It is a single extreme layout complexity case study research design, meaning that traditionally its findings may not have high external validity. Yet, Flyvbjerg (2001) argues that extreme case, such as Central in Hong Kong in term of spatial configuration complexity/unintelligibility, reflects the highest status with respect to the variable being measured, the layout complexity and predictability, and thus can be presented to capture the extreme extent of the diversity that can be observed in the reference class distribution of layout complexity. The concept of the ‘inherent intelligibility’ of a BE needs to be reconsidered when the spatial model itself impacts so much on the results
Also, only weekday pedestrian volumes were examined, so an extension of this study would be to compare weekday and weekend pedestrian movement patterns. There is also no pedestrian flow measurement ‘strictly indoor’ due to private ownership that would have been beneficial to include if available. Further investigation is also needed to better understand the overlapping relationship between the 3D shortest angular path and the 3D shortest Euclidean path in a complex 3D BE, using 3D hybrid metrics, the variation of closeness and betweenness and area sampling effects. Moreover, further work could be conducted within Carlson et al.’s integrative framework (2010). Neuroscience perspectives provide salient BE features and configurations that could be tested to better inform spatial design legibility-intelligibility (Jeffery, 2019) with the inclusion of indoor-outdoor scene relationship. Given the plasticity of the spatial cognitive processes and the varieties of individual wayfinding capacities and strategies deployed, future research on the dynamics of individual and cultural cognitive differences that interplay with life-long change should be conducted to improve the understanding of the relationship between BE design, user characteristics, lifetime change and spatial culture change.
Supplemental Material
sj-pdf-1-epb-10.1177_23998083211070567 – Supplemental Material for Walking in the cities without ground, how 3d complex network volumetrics improve analysis
Supplemental Material, sj-pdf-1-epb-10.1177_23998083211070567 for Walking in the cities without ground, how 3d complex network volumetrics improve analysis by Lingzhu Zhang and Alain JF Chiaradia in Environment and Planning B: Urban Analytics and City Science
Footnotes
Acknowledgements
We thank research assistant Khakhar, S., Su, X., Cui, Y., Zhu, J. & Tse, H. who participated in the collaborative production of the 3D indoor and outdoor pedestrian network of the study area. For Figure S07, we thank Siddharth Khakhar, Senior Research Assistant, for the production of the Hong Kong 3D spatial model of Sheung Wan to Admiralty. We thank research assistant Cui, M. and Zeng, W. for assisting in the pedestrian survey in Central and thank Ove Arup & Partners Hong Kong Ltd. and Ozzo Ltd. for providing video surveys of pedestrian.
Declaration of conflicting interest
AC is entitled to a small share of any royalties generated through sale of the enhanced sDNA+ software. AC re-invests all royalties in sDNA open-source software development. LZ declares no conflict of interests.
Funding
The authors disclose receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by Healthy High Density Cities Centre under the HKUrbanLab [000250435, “Walking with Wheels: Assessing the walkability of the 3D pedestrian network” to AC]; the Hong Kong SAR Government Strategic Public Policy Research Funding Scheme [SPPR S2017.A7.004.17S, “Strategies for Enhancing Walkability in Hong Kong via Smart Policies” to AC]; the University of Hong Kong, Faculty of Architecture seed funding [104004677.095740.01300.301.01, “Pedestrian Volume Sampling in multi-levels build environment in Hong Kong” to AC]; and the National Natural Science Foundation of China [52008297 to LZ]; National Natural Science Foundation of China (grant number: 52008297).
Supplemental material
Supplemental material for this article is available online.
![]() ). He has 20-year experience in deploying network-based configurational analysis of layout complexity in research and action research. He was University College London (UCL), Honorary Senior Research Fellow at Space Syntax Ltd from 2000 to 2009.
). He has 20-year experience in deploying network-based configurational analysis of layout complexity in research and action research. He was University College London (UCL), Honorary Senior Research Fellow at Space Syntax Ltd from 2000 to 2009.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.