
Abstract
In well-planned open and semi-open urban areas, it is common to observe desire paths on the ground, which shows how pedestrians themselves enhance the walkability and affordance of road systems. To better understand how these paths are formed, we present an agent-based modelling approach that simulates real pedestrian movement to generate complex path systems. By using heterogeneous ground affordance and visit frequency of hotspots as environmental settings and by modelling pedestrians as agents, path systems emerge from collective interactions between agents and their environment. Our model employs two visual parameters, angle and depth of vision, and two guiding principles, global conception and local adaptation. To examine the model’s visual parameters and their effects on the cost-efficiency of the emergent path systems, we conducted a randomly generated simulation and validated the model using desire paths observed in real scenarios. The results show that (1) the angle (found to be limited to a narrow range of 90–120°) has a more significant impact on path patterns than the depth of vision, which aligns with Space Syntax theories that also emphasize the importance of angle for modelling pedestrian movement; (2) the depth of vision is closely related to the scale-invariance of path patterns on different map scales; and (3) the angle has a negative exponential correlation with path efficiency and a positive correlation with path costs. Our proposed model can help urban planners predict or generate cost-efficient path installations in well- and poorly designed urban areas and may inspire further approaches rooted in generative science for future cities.
Introduction
For a long time, urban planning has been dominated by idealism, as stated by Batty (2019), Hillier et al. (1993), and Jacobs (1961). The road and street systems in most metropolises are typical examples of areas that are primarily designed based on planners’ ideas. However, these planned systems often fail to consider the desires that originate from the biological or psychological essence of pedestrians for spatial movement, resulting in many urbanism problems, such as poor walkability and energy wastage. Although the underlying structures of road systems have been discussed and applied to predict pedestrian dynamics (Hanna, 2021; Turner and Penn, 2002), such a paradigm has long disregarded the common expectation that road systems should be designed and enhanced to adapt to their users. Thus, how to design a naturally evolved road system from the perspective of pedestrians is a critical issue for urban resilience and sustainability.
In urban space, the presence of numerous desire paths in green areas is a clear indication of pedestrians’ self-organized movements to rebuild or optimize existing road systems (Helbing et al., 1997). Desire paths – also referred to social trails, kemonomichi (beast trails), chemins de l’âne (donkey paths), and Olifantenpad (elephant trails) – are defined by Richards (2022) ‘the unofficial paths that have formed through the continual, repetitive movements of humans and other animals within a landscape’. In other words, in an open field whether without any human/animal intervention or with agents aimlessly wandering around (as illustrated by a random walk simulation in Section G of Supplementary Material), desire paths cannot be generated and observed. Instead, if land use and other attributes, such as attractions, amenities, and a road system, are established, we can begin to identify patterns of movement. If there is a discrepancy between the land use/activities and the road system, such as main activities not being located on the main street, self-organized desire paths may emerge. The emergence of desire paths is an autonomous process, akin to the movement of particles in physics. Many complex physical systems, such as water flow and lightning flashes, can be interpreted as phenomena of collective interactions between the particles therein and their local environments, where the particles follow specific basic principles such as moving towards the direction with the least force, namely, active walks (Helbing et al., 1997), or Brownian-like movement, namely, random walks (Pearson, 1905). Similarly, the emergence of desire paths can also be understood by defining individual pedestrian behaviour as a sum of attractive forces by Newtonian mechanics (Helbing et al., 1997). Although particle-like models have represented the basic idea of pedestrian movement behaviour and visibility has been established as a critical element for path emergence, the connections between visual parameters, such as the angle and depth of vision, and the emergent path patterns remain unclear. Meanwhile, many microscopic scale studies have emphasized the importance of visual parameters for a deep understanding of crowd flow mechanisms (Moussaïd et al., 2011). Physical mechanics solutions also demand high computational complexity (Helbing et al., 1997), making it challenging to incorporate more granular visual parameters to explain pedestrian movement.
There is a wealth of evidence from the field of Space Syntax and natural movement theories that attributes pedestrian spatial cognition to visibility (Hanna, 2021; Hillier et al., 1993; Hillier and Iida, 2005; Turner and Penn, 2002). Space Syntax approaches this by interpreting urban spaces as graphs with different spatial representations, such as isovist/axial lines or street segments, and using graph-based measures such as closeness and betweenness, to understand pedestrian behaviour. Turner and Penn (2002) used an agent-based model, which describes how pedestrians perform random walks in buildings, guided by the probability of how far the distance they can see (represented as axial lines). Hillier and Iida (2005) used a representation of street segment-based graphs and found a good correlation between the angular weighted ‘choice’ (betweenness centrality) and observed pedestrian movement in four areas of London, where pedestrians are believed to have angular preferences of fewest turns or least angle changes. Hanna (2021) presented an agent-based model derived from the random walk principles of Turner and Penn (2002) with non-linear angular weights, adapting the model for the segment-based graphs. Hanna (2021) also found an approximate relationship between the depth of vision and turning angle of street segments, which determines the probability of direction choice. Still, the modelling with angle priority corresponds to the pedestrian movement. However, irrespectively whether the models are built on the ready-to-use road systems or designed indoor spaces, they ignored desire paths, which are generated from pedestrians’ free will and autonomous interactions with the built environment. Therefore, it is necessary to examine what the desire paths signify regarding pedestrian spatial cognition and how visibility parameters (the angle and depth of vision) further reveal this cognition.
Pedestrian movement is also influenced by their surrounding environment and their mental images of urban areas. Attractions in the environment motivate pedestrians to walk, interact with, and change the environment. For pedestrians, the environment is heterogeneous and has two main aspects: the heterogeneous attractiveness of destinations on a global scale (Ligmann-Zielinska and Jankowski, 2007) and the heterogeneous walkable affordance on the ground on a local scale (Turner and Penn, 2002). The ‘global’ scale refers to a farther vision, such as an ‘urban scale’, compared with the local surroundings. Self-organizing movement can be guided by certain factors, such as attractions, entrance points of parks, attributes at the boundaries of these areas, or even distant locations. It has been well established that the visit frequency to attractions in cities follows a ubiquitous distribution, where only a few places attract the most visits (Alessandretti et al., 2020; Schläpfer et al., 2021). The heterogeneity of place attractions is also an external force that drives pedestrian movement, particularly in low-density areas such as suburbs, and has been applied to Space Syntax’s scope through the related ‘Place Syntax’ concept (Berghauser Pont et al., 2019). The walkability affordance, on the other hand, depends on the composition of land covers directly perceived by pedestrians without reference to superior reasoning models (Lee, 2015; Savary et al., 2021; Turner and Penn, 2002). In the context of desire path formation and understanding of pedestrian movement in urban areas, such heterogeneous characteristics are either neglected or oversimplified by most models, such as active walkers, social forces (Helbing and Molnár, 1995), and microscopic simulations (Kneidl et al., 2013). An appropriate modelling of the environmental heterogeneity can further help us gain a deeper understanding of its effects on pedestrian visual perceptions and the mechanisms of the emergence of path patterns.
In this study, we demonstrate how complex path systems emerge from the collective interactions of pedestrian behaviour defined by simple visual parameters and rules. We reveal how the visual parameters affect the patterns of emergent paths and how they influence pedestrian spatial cognition, accounting for the environmental settings as heterogeneous in terms of visit attractions and walkability affordances. To simulate the path emergence, we use agent-based modelling (ABM) – a promising and effective framework for understanding emergent phenomena in nature and human society (Heppenstall et al., 2012; Ma et al., 2020) that offers many benefits, such as simplicity and high running efficiency. Each individual pedestrian is defined as an agent that has two visual parameters – the angle and depth of vision – that shape a front viewshed to perceive the environmental affordances, and two basic guiding principles: bearing a global concept about a destination all the time to assure a ‘Go straight!’ strategy and adapting to the local environment by stepping on the ground patch with the most comfortable walkability affordance. Like pedestrians in authentic scenarios, each agent has a specific origin-destination (OD) task that is mostly determined by the heterogeneous attractions in urban areas. The pre-settings of different land covers in real scenarios are also defined as three nonlinear models in order to examine their influence on the patterns of emergent path systems and pedestrian behaviour. Finally, by combining the critical conclusions about pedestrian spatial cognition from Space Syntax theories, we discuss and reveal the key factors that determine how pedestrians cognize in space in different urban scenarios and scales. This work aims to address three research questions: (1) Can desire paths emerge from simple agents with simple strategies and their collective interactions with the built environment on neighbourhood scales? (2) How do the visual parameters, the angle and depth of vision, affect the patterns of the emergent desire paths, and how do they lead to a cost-effective emergent path system? (3) How do the visual parameters contribute to pedestrian spatial cognition, as evidenced by the emergence of desire paths?
The subsequent sections encompass the following aspects: first, we describe the proposed ABM model and demonstrate a model simulation of the emergent path systems in a plain non-affordance environment; secondly, the settings of affordance and hotspots and the definition of movement efficiency indicators are presented. Subsequently a randomly generated test example and empirical validation for the proposed model on two real scenarios are given. Finally, the findings and implications of this model are discussed and conclusion remarks follow in the last section.
Simple agents with two visual parameters and two guiding principles
An agent has a viewshed area (shown in Figure 1(a)), which is a circular sector determined by its central angle and radius of the circle: the angle, β, and range of vision, d, respectively. During the simulation, the agent walks one step forward (the velocity, v = 1) for each computation. Together with the visual parameters, each agent also runs a patch-finding procedure (see pseudocode in Supplementary Material Table 1) when making moving decisions. The source code has been released under a GPL license on GitHub (https://github.com/LeiMazizizi/Agent-based-modelling-of-pedestrian-movement). Guiding principles of agent movement and emergent desire paths: (a) the two visual parameters, β and d, together with the predefined velocity, v = 1 cell; that is, one step forward per simulation tick (a-I); Two scenarios are shown (a-II): (1) one where agent A can find a high affordance patch; and (2) one where agent B cannot find a high affordance patch, that is, then go straight. (b) A simulation with the parameters set as {β = 90°, d = 6 cells, v = 1 cell} in a flat, none-affordance plane: (I) driven by a heterogenous distribution of hotspots in terms of visit frequency; leading to (II) a gradually emerging path system; (III) a path system, extracted by discarding patches with smaller affordance values and connecting the greater ones; and (IV) its corresponding enveloped path blocks.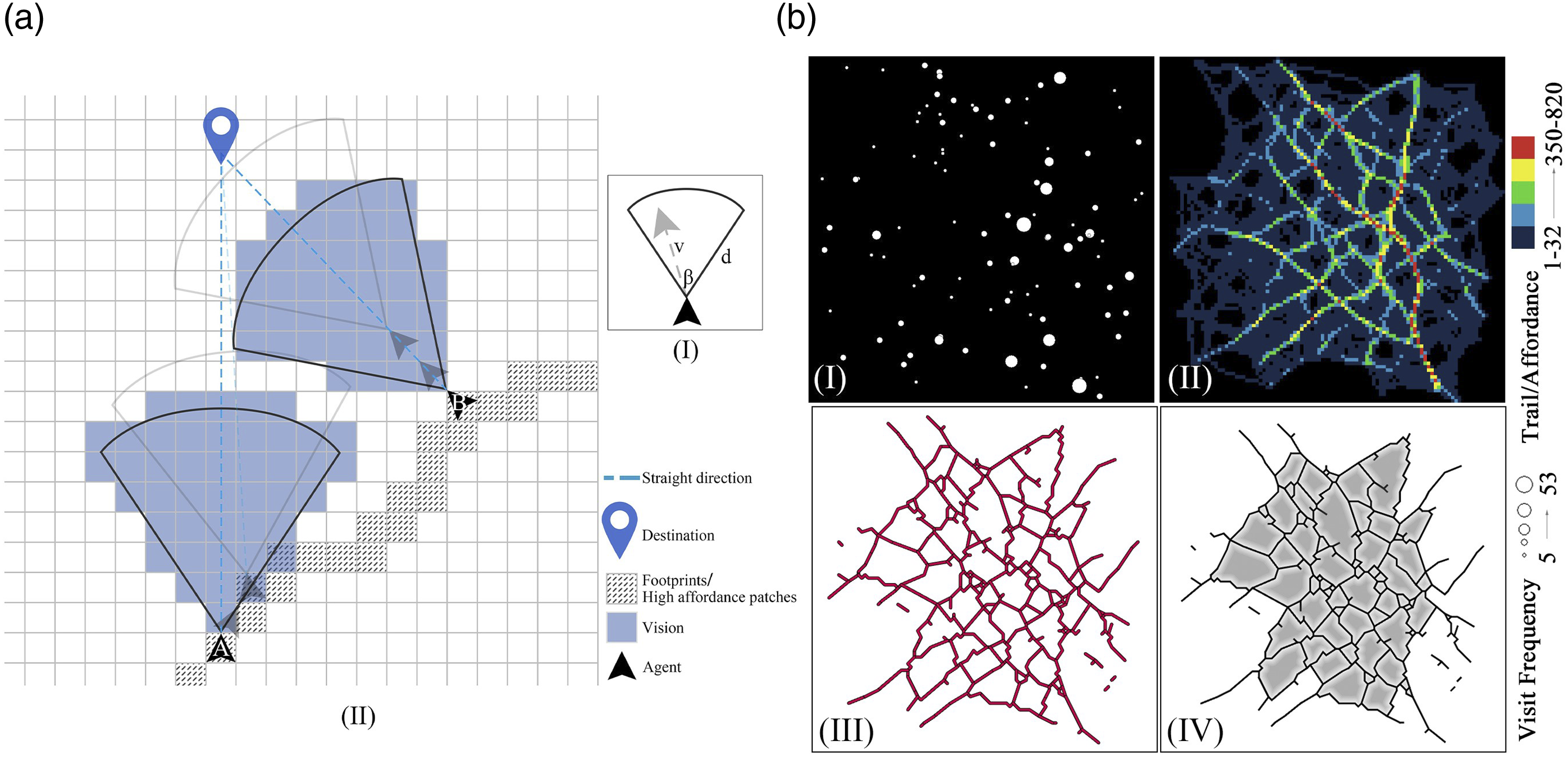
The patch-finding procedure controls how the agents move and interact with the environment based on two guiding principles: global conception and local adaptation. The global conception that is kept in mind in each agent is the aim to ‘Go straight!’ all along to its destination. This means that an agent has an OD plan from the beginning and continues facing straight towards its destination while searching for the next patch to step on. In this way, the agent can end up with a path with the least detoured distance from the straight line. Meanwhile, the agent is also adapting to its local environment when moving forward. Within its viewshed, the agent intends to seek the patch that is easiest to be walked on. The easiest patch means that it has either the greatest walkability, which depends on the affordance of the type of ground, or has the most footprints, which are amassed by precursors. Here, the walkability and the footprints are assumed as the affordance in general and are used interchangeably in the following context. There are two scenarios (Figure 1(a)). Firstly, if there exists one neighbouring patch with the highest affordance, choose it as the next moving position; or if more than one patch is found, choose the one that is closest to the current position. Secondly, if the affordances are uniform, choose the closest patch that is on the straight line to the global destination as the next moving position. After such adaptation, the agent will move along the chosen patch and then face towards the global destination again for the succeeding patch-finding procedures. When an agent performs its movement, it also contributes one footprint to the passing patch. A path system will then be accumulated from the interactions between the agents’ movement and environment (Figure 1(b)).
Settings of simulation environment and movement efficiency indicators
Visit frequencies of hotspots
Pedestrians’ purposive movement motivates them to move towards dozens of destinations or hotspots. The attractiveness or visit frequencies of hotspots has been proven to be heterogeneous (Schläpfer et al., 2021), which is commonly scale-free and follows a power-law distribution. In our simulation, the attractiveness of hotspots is also set up as heterogenous and generated by the Klemm-Eguíluz (2002) model. In addition, to compare our simulation with the results from Helbing et al. (1997), the visit frequencies of hotspots are accordingly set as homogenous, where for example all the hotspots have identical attraction with value 1. Then, in the empirical validation process, the visit frequencies of buildings are determined by the OD flows, which were collected from our field survey (Section D and E in Supplementary Material) and demonstrated heterogeneous distributions.
Environmental affordances for real validation areas
In the real world, different land characteristics bring distinct affordances towards the moving cost of pedestrians. For example, walking on sidewalks is obviously much easier than on lawns, and crossing over barriers such as low fences is simpler and safer than walking on vehicular roads. Similar reasoning can also be found related to wildlife migration in terms of least-cost paths (Savary et al., 2021). In the present study, we defined seven categories of land covers: sidewalks, parking areas, lawns, barriers, roads, side-roads, and buildings. The sequence of their affordance sizes is also defined as such in our assumption. The modelling of affordance values of the seven land covers is referred to the ecology equation proposed by Shirk et al. (2010) and modified as follows

Efficiency measurement towards agent movement
The path systems emerging from the collective movement of pedestrians also shape the pedestrian movement. To inspect how the visual parameters (the angle of vision, β, and depth of vision, d) quantitatively influence the efficiency of pedestrian movement and the emergent path systems, two indicators, the mean of distance difference (MDD) and the sum of paths (SP), are further discussed. The MDD is the mean value of all distance differences acquired by
Results
Simulations of path system emergence for a randomly generated test example
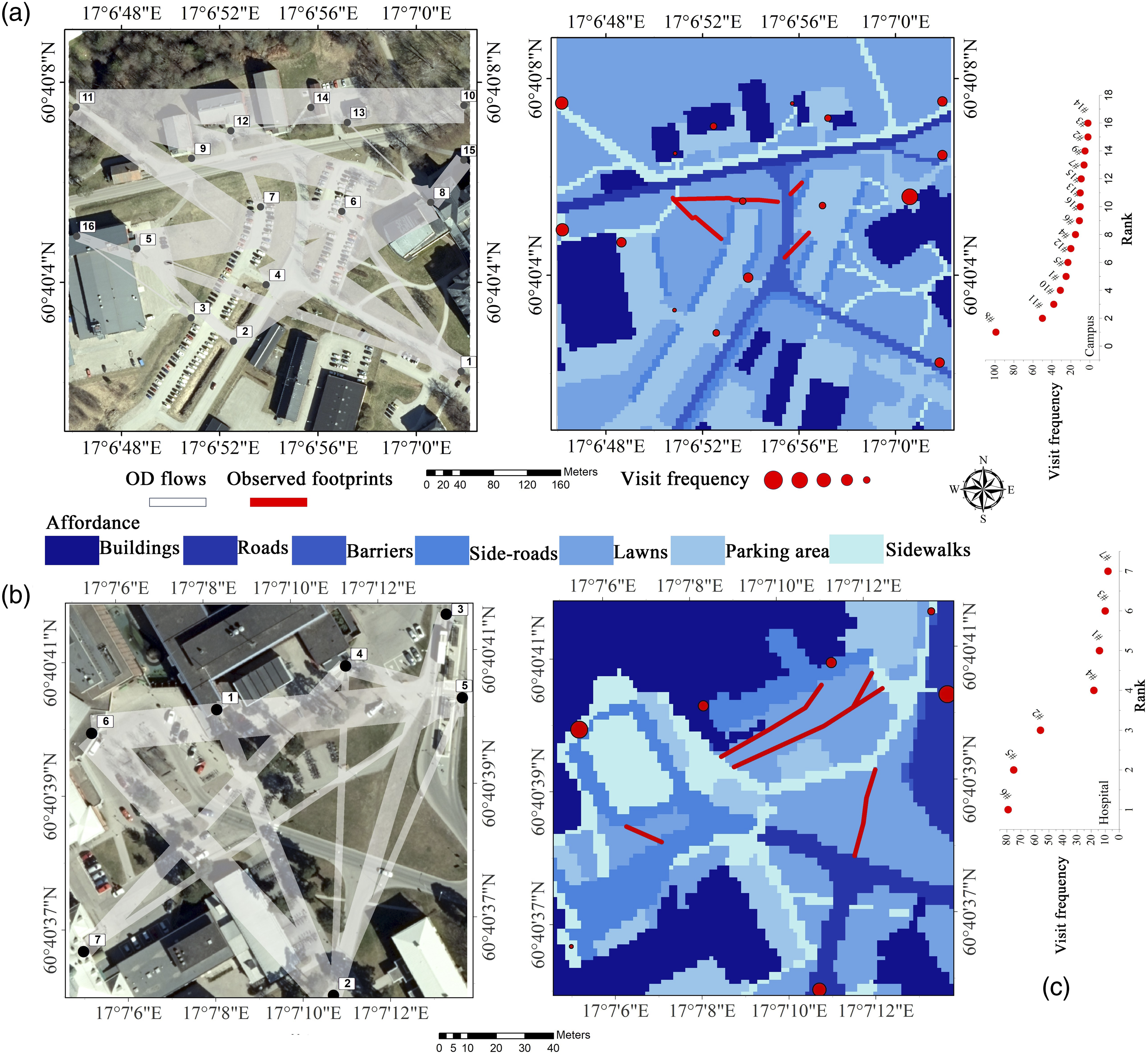
To show how the visual parameters – angle of vision, β, and depth of vision, d – influence the path emergence (cf. Figure 1(b) and more details in Section B in Supplementary Material), this model ran on a flat surface with zero-affordances where the accumulation of affordances was entirely contributed by the agents’ movements. Three simulations based on different setting of hotspots, which attracted agents moving towards themselves, were carried out: randomly distributed 100 hotspots with heterogenous attractiveness (Figure 2), a triangle-shaped distribution with three homogeneously attractive hotspots and a square-shaped distribution with four homogeneously attractive hotspots (Supplementary Material Figs. 3–4). The latter two were to compare the path patterns from our simulations with those exemplified in the work by Helbing et al. (1997) (cf. Figure 3 in Helbing et al., 1997). Next, the ranges of two parameters (β, d) are [30°, 170°], and [2, 20 cells], respectively, and their combinations were set as follows: {β ∊ [30°, 170°] (in increments of 30°), d = 10 cells}, {β = 90° and d ∊ [2, 20 cells] (in increments of 2 cells)}. Along with the simulated agents’ patch-finding procedure and collective interactions with the environmental affordance, a path system generally emerged from the accumulation of agents’ self-organized movement in a natural way. Inspection of the patterns of the emergent path systems revealed that: (1) Along with the increase of the angle β, the paths appeared to bend progressively and converge to a few aggregated paths, where the agents might turn to move for a longer distance and share paths with others; and (2) the depth of vision showed limited impact on the path patterns, where the bending and convergence were obvious for the d ∊ [2, 6 cells] but not for the d ∊ [6, 20 cells]. Emergent path systems for a randomly tested example in terms of β and d, respectively. Study areas at (a) the campus of the University of Gävle and (b) the Gävle Hospital. Air photos (©Lantmäteriet) to the left and their corresponding categorized affordance images (resolution: 100 × 100 cells) to the right. The OD flows on the air photos are shown as direct lines with different widths corresponding to different flow intensities; (c) shows the distributions of visit frequencies of hotspots.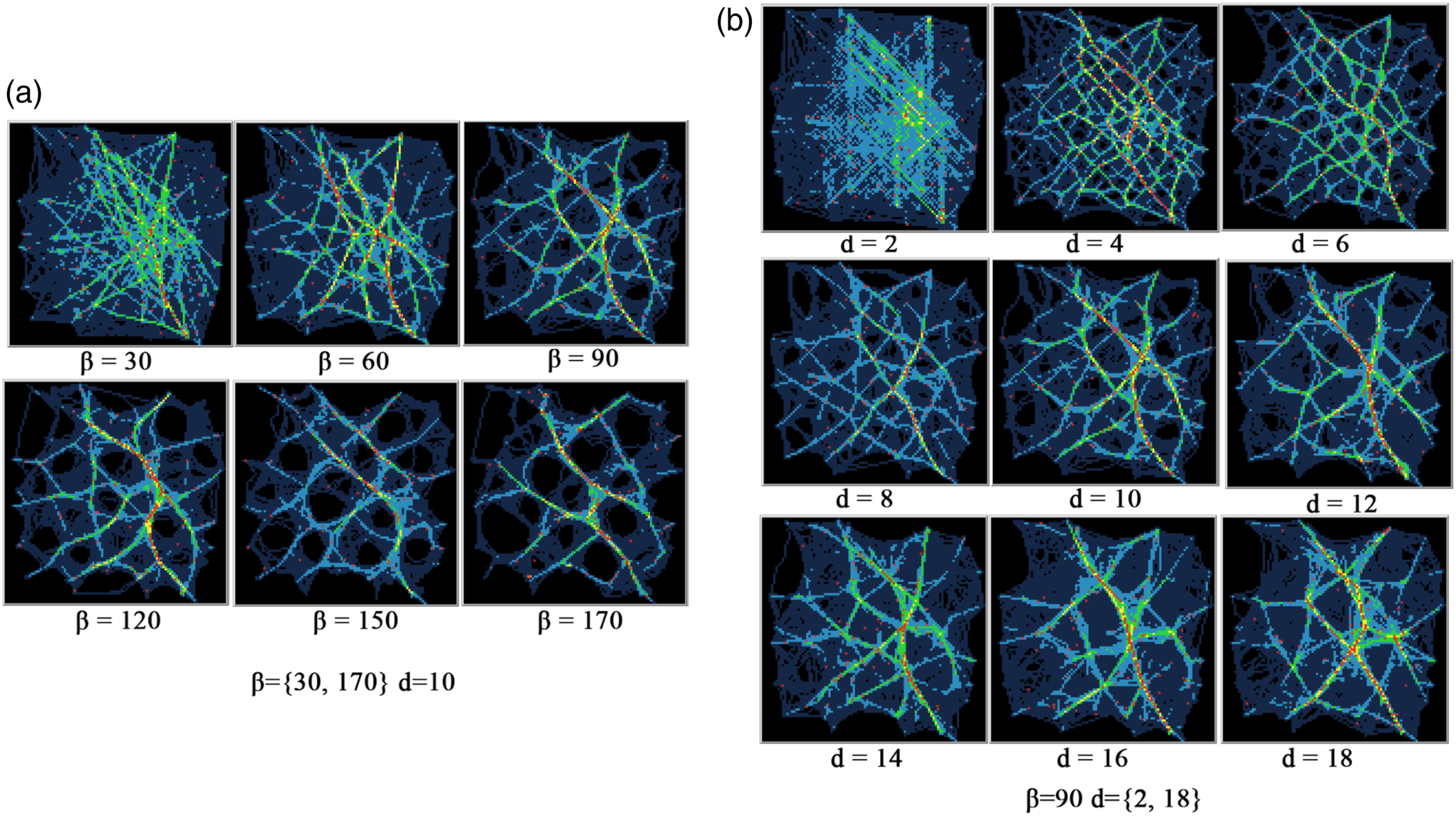
Empirical validation
Two areas were selected to validate the proposed model: a part of the campus of the University of Gävle and an open area in front of Gävle Hospital (Figure 3 and see details in the Supplementary Material). These two areas are typical places with explicit hotspots where pedestrians have clear destinations, such as when walking to study rooms or heading to the clinic, rather than at other places like residential areas, where people often walk in a more leisurely, meandering manner while strolling or walking dogs. Another advantage is that these areas contain both planned pavements and unpaved ground such as lawns. The OD statistics were acquired from a field survey in August–October 2021 and the paths can be easily observed and measured from the ‘bald’ footprint tracks on the lawns where grass can barely grow. Therefore, the footprints served as evidence to expose how people moved through the physical space, thereby modifying the well-planned infrastructure in a natural way.
To examine how the proposed model can represent pedestrian movement, the accuracy, 𝐴𝑖, was defined as the proportion of the total number of simulated paths located within a buffer zone of width
The emergent path systems in the two areas displayed distinct patterns for different combinations of β and d (as shown in several cases in Figure 4). Regardless of the area, a shift in β from 30° to 170° resulted in the paths evolving from a scattered to a more aggregated distribution, ultimately appearing solely in constructed areas such as sidewalks. A shift in d, however, had negligible impact on the emergent patterns. In terms of path deflection, patterns with smaller β were much straighter than those with bigger ones. Clearly, the small deflections resulted from agents’ narrow viewshed, who performed ‘Go straight!’ directly and walked on the lawns without awareness of high-affordance areas at more peripheral view angles. Larger β enables agents to sense more peripheral comfort patches and behaved ‘Go around!’ leading to more footprints on the sidewalks and parking areas and fewer on the lawns. When β reached its maximum at 170°, all emergent paths ended up on the comfort patches. Footprints on lawns were scarcely observed, unless they served as bridges to connect the comfort through the uncomfortable areas. Emergent paths for different β-d combinations in the campus and hospital areas with linear affordance as examples.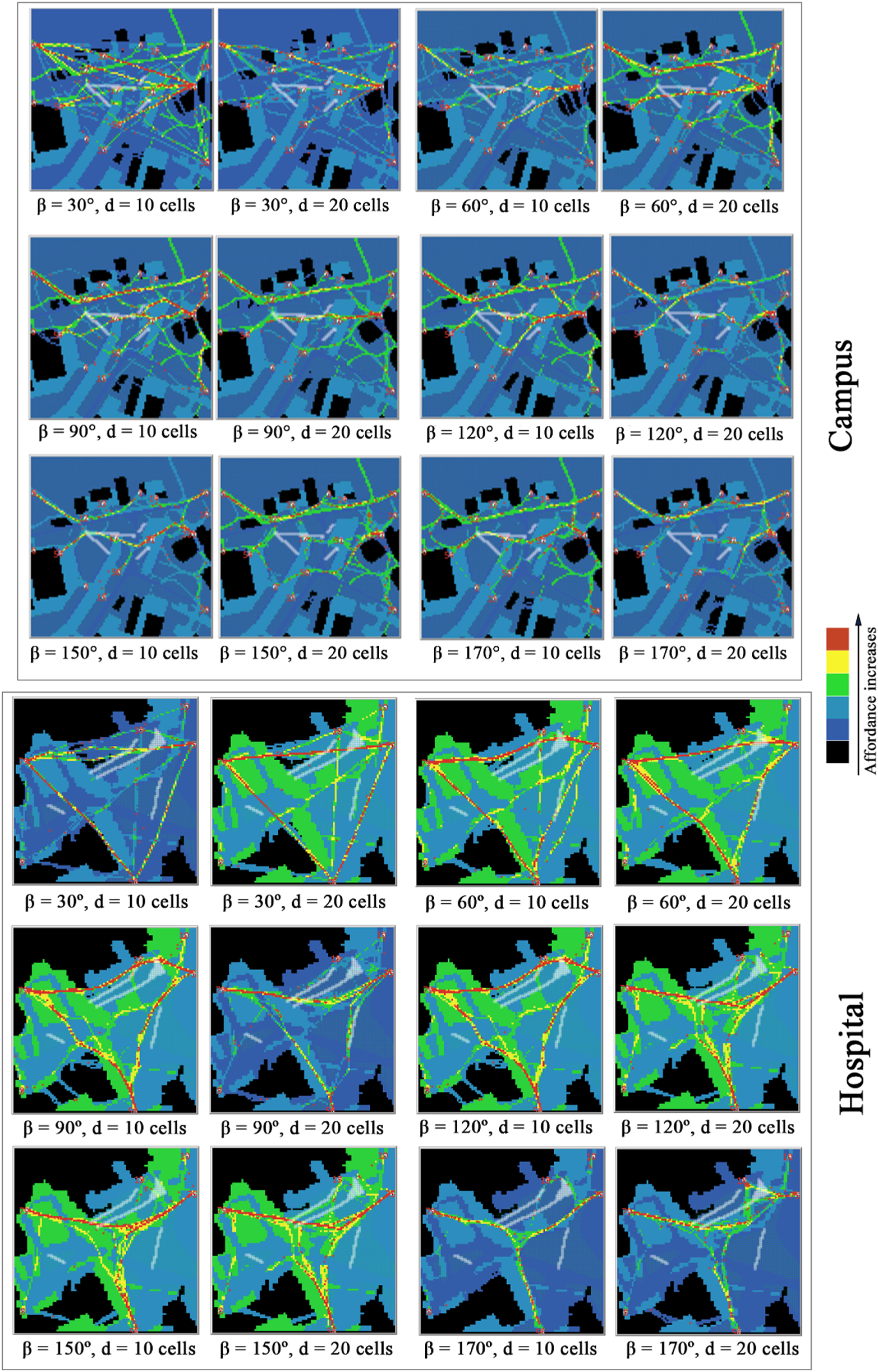
According to the accuracy of the model indicated by Distributions of accuracy, 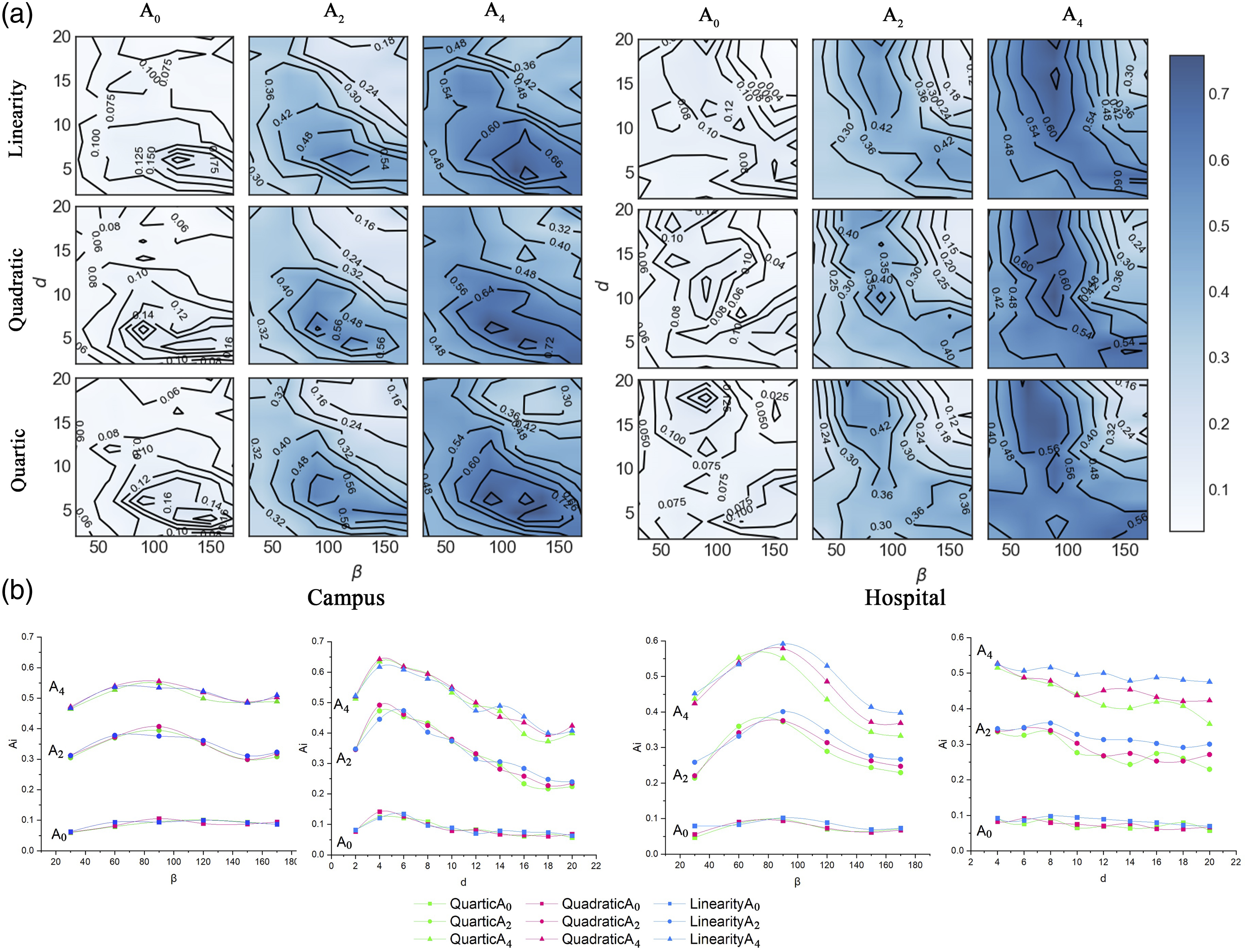
Discussion
Based on an agent-based simulation with pedestrian behaviour modelled with two visual parameters and two guiding principles, this study shows that a natural path system can emerge from the collective interactions between the modelled pedestrians and their environments. In addition, the settings of environmental heterogeneity in terms of visit frequency and affordances also provide a practical assumption for the examination and implementation of real scenarios. This section further discusses our findings of the proposed model and its implications.
Visual parameters versus patterns of emergent path systems
The simulations and empirical data show that the angle and depth of vision have inconsistent effects on path patterns. The angle of vision has a greater impact on the path emergence, with paths becoming more concentrated as the angle increases. The depth of vision has a minor effect. In the real-world examples of campus and hospital areas, a range of approximately [90°, 120°] is found to be the most accurate for simulating paths. This suggests that individuals tend to walk straight to their destinations without paying attention to their surroundings. However, they will deviate from their path if they become aware of obstacles or paths created by others.
The simulation results support the findings of prior literature that the angle of vision is a more critical factor than the depth of vision in the patterns of emergent path systems. According to the simulation results (duplication of Helbing et al. (1997)) shown in Supplementary Material Figs. 3–4, the convergence of path systems is strikingly sensitive to the change of angle rather than that of the depth. The extreme convergence of path systems additionally occurs at an angle of 170°, which is assumed as the maximum angle of human visual perception (Gibson, 1950; Turner and Penn, 2002). The angle of vision thus is the major element affecting path patterns, rather than ‘visibility’ as proposed by Helbing et al. (1997). Furthermore, this finding is also in line with the conclusions of most research in the field of Space Syntax, which suggests that the angle of paths – particularly the minimization of angles, such as with the least angle or fewest turns – plays a key role in how pedestrians make decisions in urban spaces (Hanna, 2021; Hillier and Iida, 2005; Omer and Jiang, 2015; Turner and Penn, 2002). In our agent’s pathfinding mechanism, dubbed ‘Going straight!’, agents maintain awareness of their destinations and consistently face towards them while moving. This mechanism precisely explains pedestrian cognition at the neighbourhood scale, resulting in minimized paths with the least angle, which is consistent with observed pedestrian behaviour on larger urban scales.
Scale-invariance is another consideration when implementing models, particularly for datasets with varying levels of granularity. In this study, using a constant depth of vision across different map scales can result in different path patterns. Therefore, adjusting the depth according to the scale may contribute to consistency in the emergent path patterns. We further examined the evolution of path patterns on different scales with and without changing the depth value (see Figure 6). When the depth remains unchanged, the path layouts vary more pronouncedly across different scales; layouts on smaller scales are assumed to be downsampled or generalized from larger scales, where the major paths attracting most pedestrians seem to be preserved while the trivial ones are dropped off. By adapting the depths to their corresponding scales, the path layouts can, contrarily, be well maintained, regardless of the scale variations. We propose that smaller map scales can result in more generalized path patterns and that adapting the depth of vision to the corresponding scales promotes scale-invariance of path layouts. Scaling up of path systems along with the visual depth, d, on different scales: (a) d (= 10 cells) stays unchanged; and (b) d simultaneously scales up by a ratio 1.5 along with the map scales. The angles of vision are set as 100° in all these cases and the simulations are on a plain surface.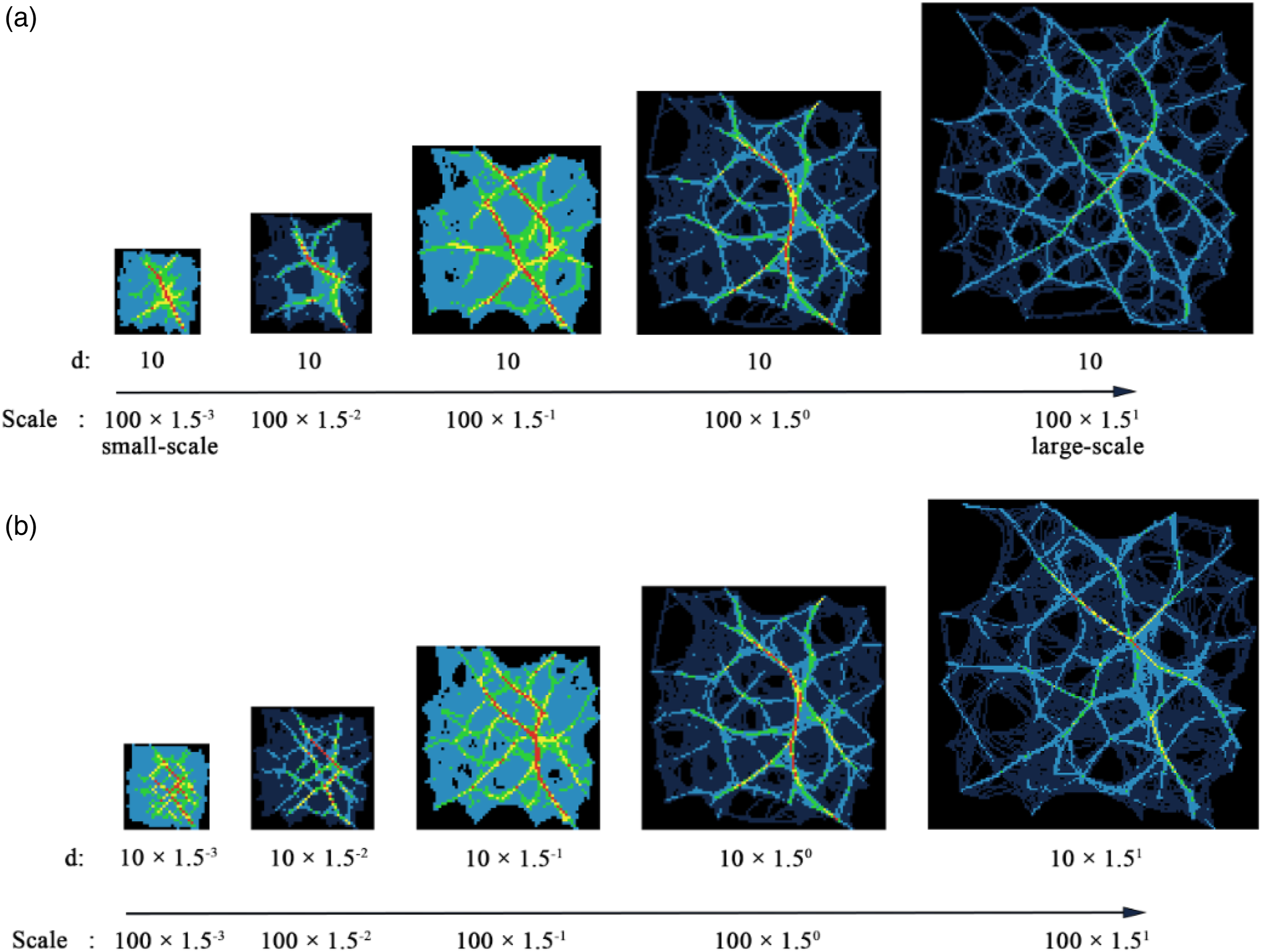
Visual parameters versus cost-efficiency of emergent path systems
We further examined the indicators of MDD and SP, collected from the simulations described in the results section (see Figures 7 and 8 and Table 1), and analysed the power-law correlations – a scaling property of complex phenomena (Bettencourt, 2013) – of these indicators with respect to β and d. The results show that for all simulations, MDD increases while SP decreases as β increases, with the two indicators intersecting at approximately 90–150°. Additionally, MDD fluctuates as d increases; SP, on the other hand, experiences a significant drop when d ∈ [2, 6] and stabilizes at low values when d > 6. The power-law fittings also indicate an exponentially positive correlation between MDD and β (with power-α values all above 1.0 and below 1.5) and a negative correlation between SP and β (with power-α around −0.5). However, neither MDD nor SP displays a strong correlation with d. It was also observed that the variation of MDD remains consistent across different affordance models, while the variation of SP differs, exhibiting lower values for the models with higher powers (for instance, from the linear to quartic). Distributions of MDD and SP regarding visual parameters β and d, respectively, for the randomly generated data simulations. The power-law fittings are shown as log-log plots; that is, a power-law distribution Distributions of MDD and SP regarding visual parameters, β and d, for the scenarios including the university campus and hospital area in Gävle, with the three affordance models: the linear, quadratic, and quartic. The power-law fitting results between the visual parameters-β and d, and MDD, SP from the simulations of the university campus and hospital area in Gävle.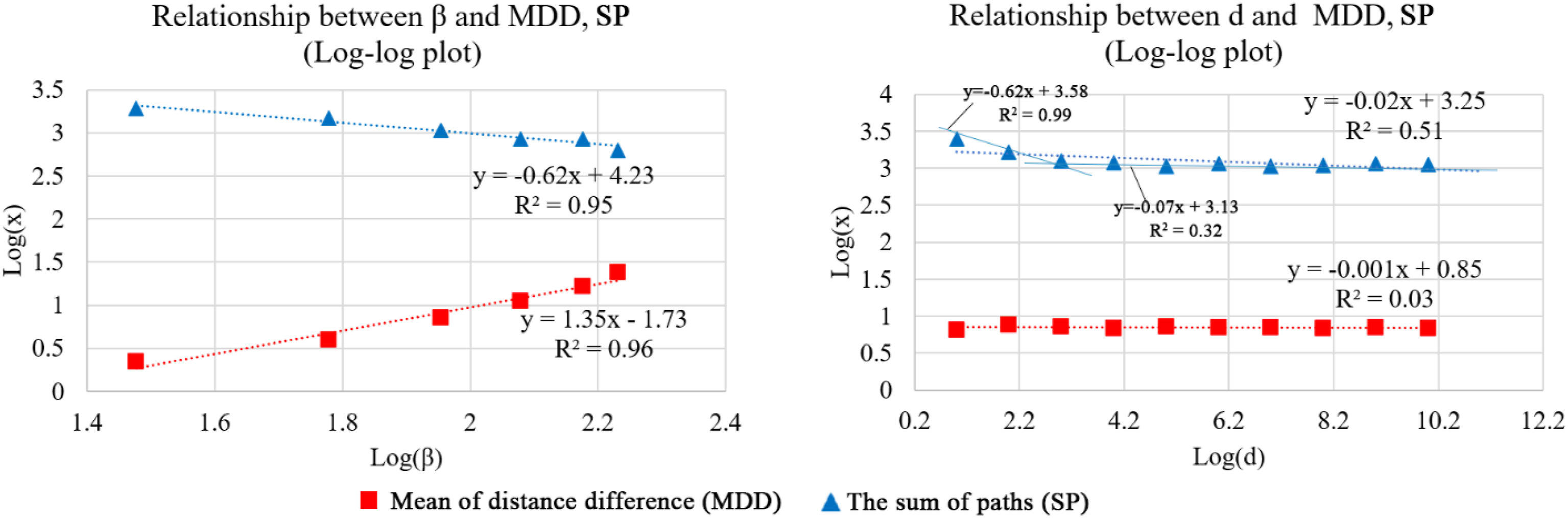
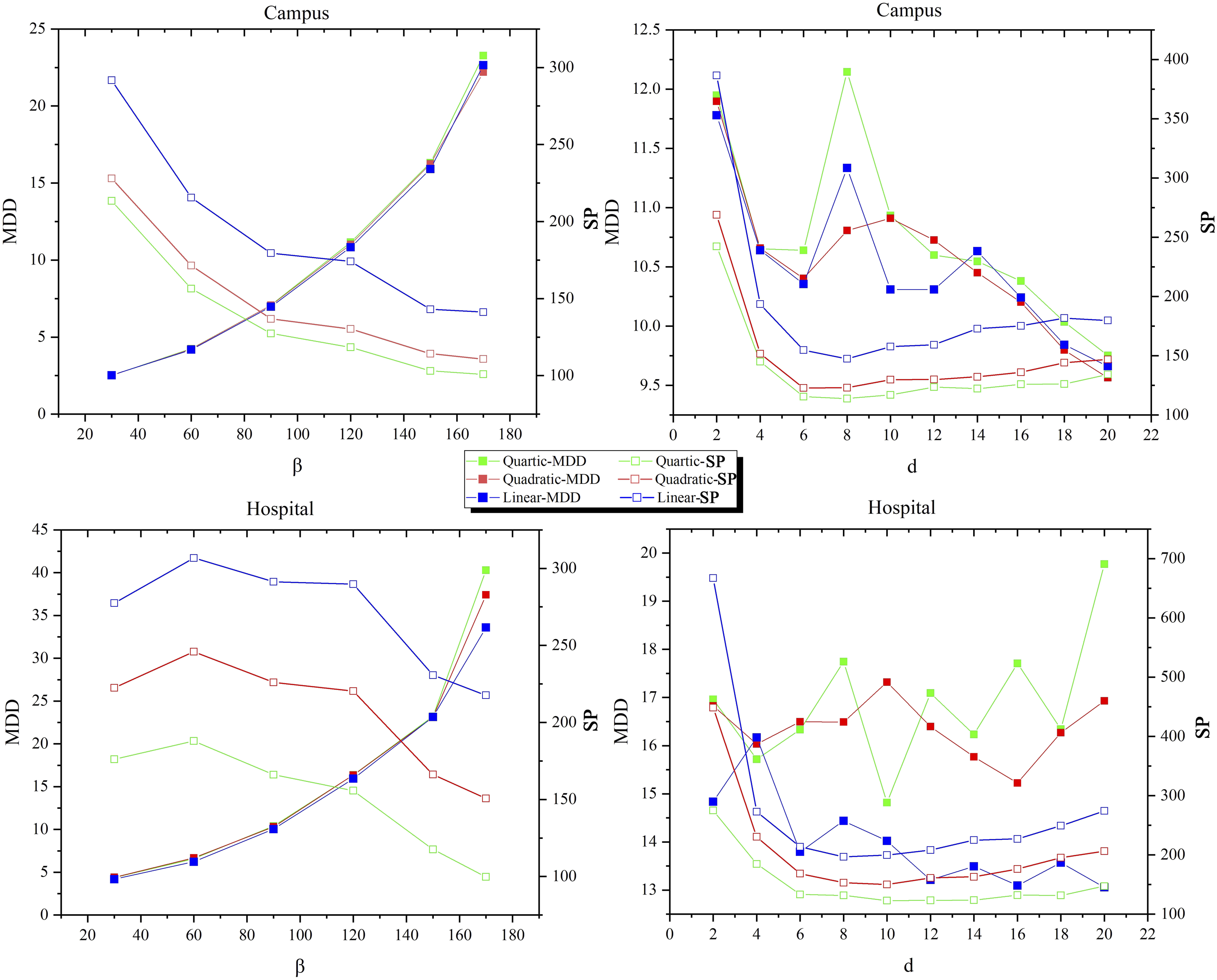
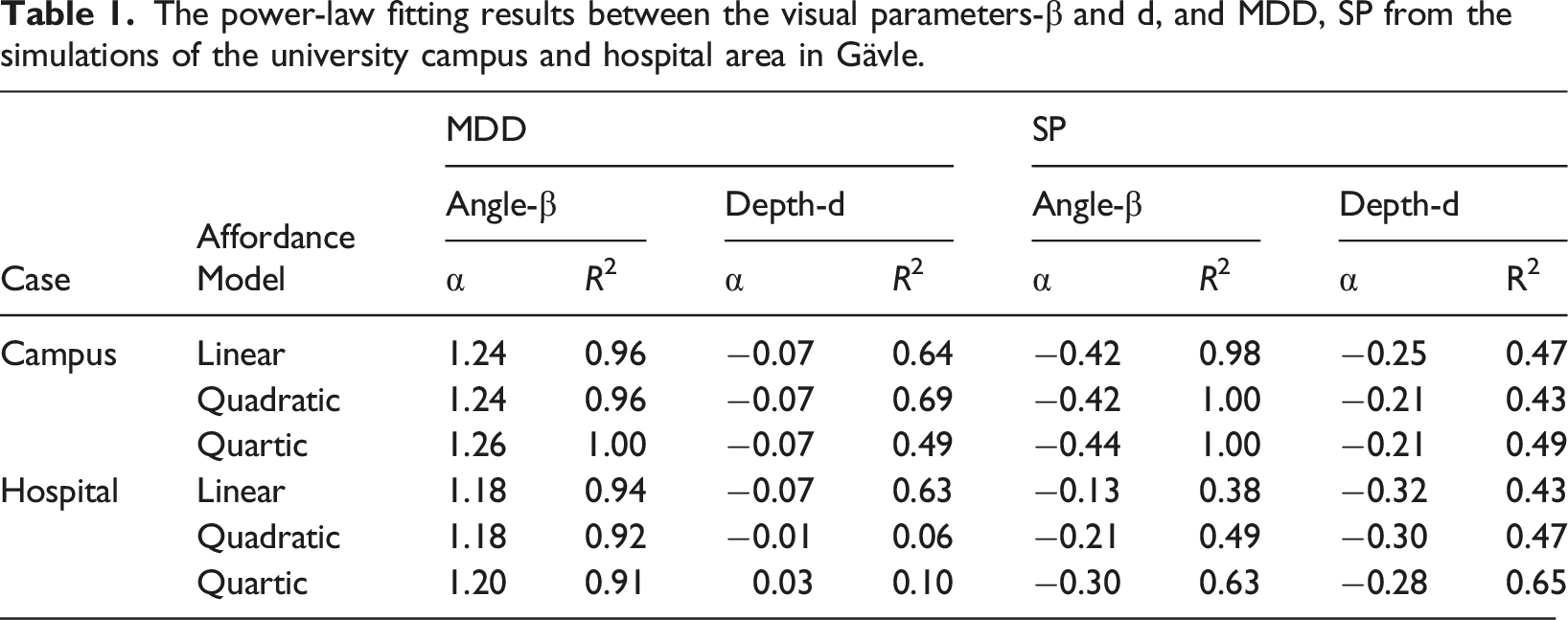
In addition to these common patterns, there are two minor differences that can be noted between the campus and hospital scenarios: (1) the SP versus β curves conform to a well-fitted power-law distribution (R2 values are strikingly close to 1.00) in the case of campus, presenting a concave-like shape. In contrast, the hospital scenario presents a less accurately fitted power-law distribution, with the curves exhibiting a convex-like shape; and (2) the MDD versus d curves have overall downward trends for the campus area while they are fluctuating for the hospital area. These differences might be attributed to the distinct visiting patterns in the campus and hospital areas, specifically in terms of the spatial distribution of hotspots or the statistical distribution of visit frequencies. Another possible factor could be the unique spatial distribution of environmental affordances in each area. Exploring the influences caused by those factors is also intriguing and worth investigating in our future work.
These statistical common patterns lead us to conclude critical properties of the visual parameters. Firstly, an increase of angle leads to an exponential increase in travel consumption for pedestrians, regardless of the environmental affordances. Here, consumption is defined as the relative time or energy spent compared to the shortest distance for pedestrians to reach their destinations. The difference between actual and conceptual consumption is closely correlated to the pedestrian walkable experience (Saelens and Handy, 2008). Secondly, setting up the angle in the range of [90°, 120°] promotes the most cost-efficient path systems. Both the empirical accuracy validation and the consumption-cost examinations support this approximate range of the angle, where a natural balance between efficiency and economy can be achieved. In other words, as the angular maximum is presumably determined by biology (β < 170°) and the preference for going straight, this range of angle [90°, 120°] captured by our model indicates that the paths chosen by pedestrians are a balance between the individuals and their surrounding environment. Hence, a cost-efficient path system can emerge.
Spatial visual cognition versus generative urban planning
Pedestrian modelling based on a multi-agent system provides a promising way to understand how we perceive the environment and make movement decisions in space. As demonstrated in the results, the angle is more critical than the depth for the emergence of path patterns, indicating that our path choices are affected by the width of our field of view, rather than the distance. This is generally consistent with Space Syntax theories on the fundamental role of the angle of vision in pedestrian decision-making on streets, though there are still some differences between our strategy and some models from Space Syntax. In our modelling, agents perform purposive movement based on heterogenous attractions, while in Space Syntax, agents make random walks with homogenous attractions controlled by probabilities based on either the street straightness (Hanna, 2021) or the length of isovists (Turner and Penn, 2002). From this point, with or without the difference between attractions, pedestrians may follow the straightest path and avoid deviating from it. Thus, such a ‘Go straight!’ strategy is a result of minimizing angle changes during pedestrian movement in most urban and neighbourhood areas. This strategy can also be represented by axial lines, particularly in some narrow strips where they may align well with the emergent desire paths. In more open and broader spaces, shorter ‘axial lines’ (other diagonals in isovist) may be more suitable for representing the desire paths, and they may be influenced by the heterogenous attractions. Additionally, the angle of vision, or its resulting ‘Go straight!’ strategy, not only works in the neighbourhood scales (as in our model), but also works on greater urban scales (as in Hanna, 2021, model). The angle may even perform when the scale is 4 kilometres, as suggested by Hanna (2021). Moreover, the approximate range [90°, 120°] for the angle of vision found in this study is slightly different from the 170° cone of vision discovered by Turner and Penn (2002), which correlates best with the pedestrian movement in the Tate Britain Gallery. This difference is likely due to the varying environmental settings; the spaces in our scenarios are open and allow for the creation of desire paths even when barriers are present, while the planned indoor spaces such as the gallery do not allow for such free movement, and obstacles such as walls cannot be passed through. This results in a broader viewshed, closer to the biological visual limitation, for pedestrians to search for the next spot to avoid barriers.
Since the multi-agent simulation was introduced by Reynolds (1987), such heuristic biology-based methods have demonstrated a strong competence to understand complex systems and exhibit a huge capability to create or generate complex systems in a natural way (Epstein, 2012). Unlike most generative models of urban design, we have demonstrated that the complex path systems can be generated by simple agents with simple principles. Such generative path systems emergent from bottom-up approaches offer an efficient strategy to connect the ground features that cannot be achieved by traditional linear models or other architectural designs. A future three-dimensionally generative strategy may also provide more opportunities for better urban planning.
Conclusion
In this study, we present an agent-based modelling to simulate pedestrians by incorporating two visibility parameters – the angle and depth of vision – and two guiding principles – the global conception of the destination and local adaptation to the environment. Driven by a heterogeneous environment in terms of hotspots with diverse visit frequencies and environmental affordances, a path system emerges from the collective interactions between the agents and environment in a bottom-up manner. The simulation results indicate that the emergent path patterns are primarily determined by the angle of vision. The depth of vision is closely correlated with the scale-invariance of the path patterns, with patterns remaining consistent when the depth value is scaled from large to small scales. The angle of vision, in terms of modelling pedestrian behaviour, suggests a range of [90°, 120°] to align with actual observations. This range also balances the cost-efficiency of the number of generated emergent paths and the average distance between the actual and ideal straight distance of pedestrian movement. The tested order of environmental affordance models in terms of different surface comforts – the linear, quadratic, and quartic – have no apparent effect on the emergent path systems or pedestrian movement; however, a higher order of the affordance model, such as the quartic, favours a lower cost in terms of the number of generated paths.
Batty (Batty, 2005, p. 107) noted, ‘We believe that for complex systems, the essence of complexity lies in the way simple processes generate emergent structures, and to this end, our laboratories must provide testbeds for simple models built around local processes that lead to global structures’. In the present study, we have demonstrated that path systems, as a complex phenomenon, are the result of collective interactions of simple mechanisms of pedestrian behaviour. Through the emergence of desire paths from self-organized pedestrian movement in open spaces, we have found that the angle of vision plays a greater role in shaping pedestrian behaviour compared to the depth of vision. This aligns with the conclusions from the field of Space Syntax, which argues that minimizing angular changes or following the straightest path is a fundamental aspect of pedestrian movement. This behaviour can be approximated by axial lines in narrow spaces, and further by other ‘axial lines’ influenced by the distribution of attractions in open spaces. Furthermore, generating or predicting a natural road system for pedestrians is a promising avenue for future urban planning, a path to a more efficient and walkable urban environment.
Supplemental Material
Supplemental Material - Simple agents – complex emergent path systems: Agent-based modelling of pedestrian movement
Supplemental Material for Simple agents – complex emergent path systems: Agent-based modelling of pedestrian movement by Lei Ma, Sven Anders Brandt, Stefan Seipel and Ding Ma in Environment and Planning B: Urban Analytics and City Science
Footnotes
Acknowledgements
Many thanks are due to the anonymous reviewers for insightful and constructive comments on the paper.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Data Availability Statement
The data given this article are openly available on Github at ![]()
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.