
Abstract
Laboratory automation systems (LAS) provide full automation of the pre-, peri-, and post-analytical specimen processing tasks in clinical laboratories. However, many existing instruments are difficult to interface, both mechanically and electronically, to specimen transportation systems. The AxSYM (Abbott Laboratories, Abbott Park, IL) analyzer is a popular method to perform immunoassay and toxicology measurements. In order for the large installed base of AxSYM instruments to take advantage of the efficiencies of automation, a prototype interface was developed for a popular LAS, the Coutler/IDS Model CLA (Coulter Corporation, Miami, FL). The automated instrument interface was designed for automatic loading and unloading of the AxSYM analyzer. The automated system can accept one or two AxSYM analyzers depending on the throughput and sample distribution needs of the laboratory. At the heart of the AxSYM automation is a CRS (Burlington, Ontario, Canada) robotic arm that is used to remove specimens from the model CLA, place them in an AxSYM sample tray, load the analyzer, and then automatically unload the finished specimens and return them to the Coulter/IDS. The system is projected to load and unload up to 200 specimens per hour from and to the conveyor system. While supporting automated loading, the system allows the AxSYM analyzer(s) to run manually loaded specimens. Minimal interfacing is required to install and operate the automated AxSYM so that the system can be up and running quickly. No physical connections are made to the Coulter/IDS thus simplifying installation and maintenance.
INTRODUCTION
A typical LAS consists of automated devices that perform specimen processing, analysis, aliquotting, and storage. Dedicated devices perform each of these extra-analytical functions on specimens that are passed from one system to another sequentially via conveyor belts. Specimens are transported on the conveyor using a specimen transport carrier. In the case of the Coulter/ IDS model CLA, specimens are transported in individual pucks that are diverted to each processing and analytical station by diverters built into the conveyor belt line. Microprocessors control each diverter to direct each specimen after reading the bar code on the tube.
Once decapped specimens arrive at a location on the conveyor belt to be analyzed there are at least three options for sampling from the specimen container. The specimen can be aspirated directly from the open tube by a pipette tip located on a mechanical proboscis. In this case, the analytical system has to be equipped with a specimen aspirator that can locate the serum or plasma interface, and remove the necessary fluid. The identity of the tube has to be ascertained by the conveyor belt system and then passed on to the analytical system in order to assure a positive patient identification. Using this direct tube sampling, an interface is required to link the analyzer to the bar code reader on the conveyor belt, A second scenario is to remove the tube from the track, place it into the analyzer, remove the necessary serum of plasma and then return the tube to the conveyor belt. A third option is to remove the tube from the conveyor belt, place it into a specimen rack, and then place the rack into the analyzer.
The option which is chosen to accomplish automated loading and unloading depends entirely upon the throughput desired, the mechanical configuration of the analyzer, and the mechanical device used to move the patient specimen. Often, the choice of mechanical interface is dictated primarily by the mechanical configuration of an analytical system which was designed to be operated by people. In fact, it is desirable to maintain a method to manually load and unload an instrument to work in concert with the automated loading and unloading feature. Manual loading is often reserved for STAT specimens (those requiring fast turnaround) and specimens in small tubes.
We developed a method to automatically load and unload the AxSYM analyzer in order to demonstrate that today's instruments can easily be incorporated into a fully automated laboratory. We also demonstrated that an analytical system can be interfaced to a commercially available conveyor belt without the need for physical connections (either electronic or mechanical) directly to the conveyor. Finally, we demonstrated that automated instrument loading can be calculated to provide cost savings in a laboratory with a sufficiently high volume of specimens.
METHODS
These studies were conducted in the MARC clinical laboratory that has been configured for conducting clinical trials of laboratory automation. The Abbott AxSYM and Coulter/IDS CLAS systems were generously loaned to the MARC by their vendors for the purposes of this study. The human scale robot arm, which was used to move specimens and racks, was supplied by CRS Robotics, Inc. (Burlington, Ontario, Canada). A special frame was constructed to hold the robotic arm and controller, pneumatics, sensors, specimen storage areas, and bar code reader by Quality Welding (Charlottesville, VA). The parts used to detect the presence of specimens delivered by the conveyor belt, temporarily arresting the sample transport pucks, rotating the specimen, and reading the bar code, were supplied by CIM Associates, Inc. (Ruckersville, VA). Special robot fingers, modifications to Abbott test tube racks, and all other machining, fabricating, and robot programming was performed in the MARC.
RESULTS
The mechanical interface was designed to be placed along the back of the AxSYM adjacent to the convey belt “U” lane (Figure 1). In this location, the robot could reach the input and output sides of the “U” lane as well as the carousel of the Abbott AxSYM. Samples were detected when they arrived at the input side of the “U” lane and were immediately stopped by an extended pneumatic cylinder arm. The arrested specimen was rotated by a small pneumatic arm until the bar code was detected by the laser operated bar code reader. The robot then removed the specimen from the transport puck and placed it into a modified AxSYM rack (Figure 2). Once the rack was filled, an electronic interface to the AxSYM indexed the carousel to allow an empty rack receptacle to position itself within reach of the robot. Specially designed robot fingers grasped the rack (figure 3) and placed it into the AxSYM (figure 4) and an electronic signal was sent to allow the AxSYM to process the specimen properly.
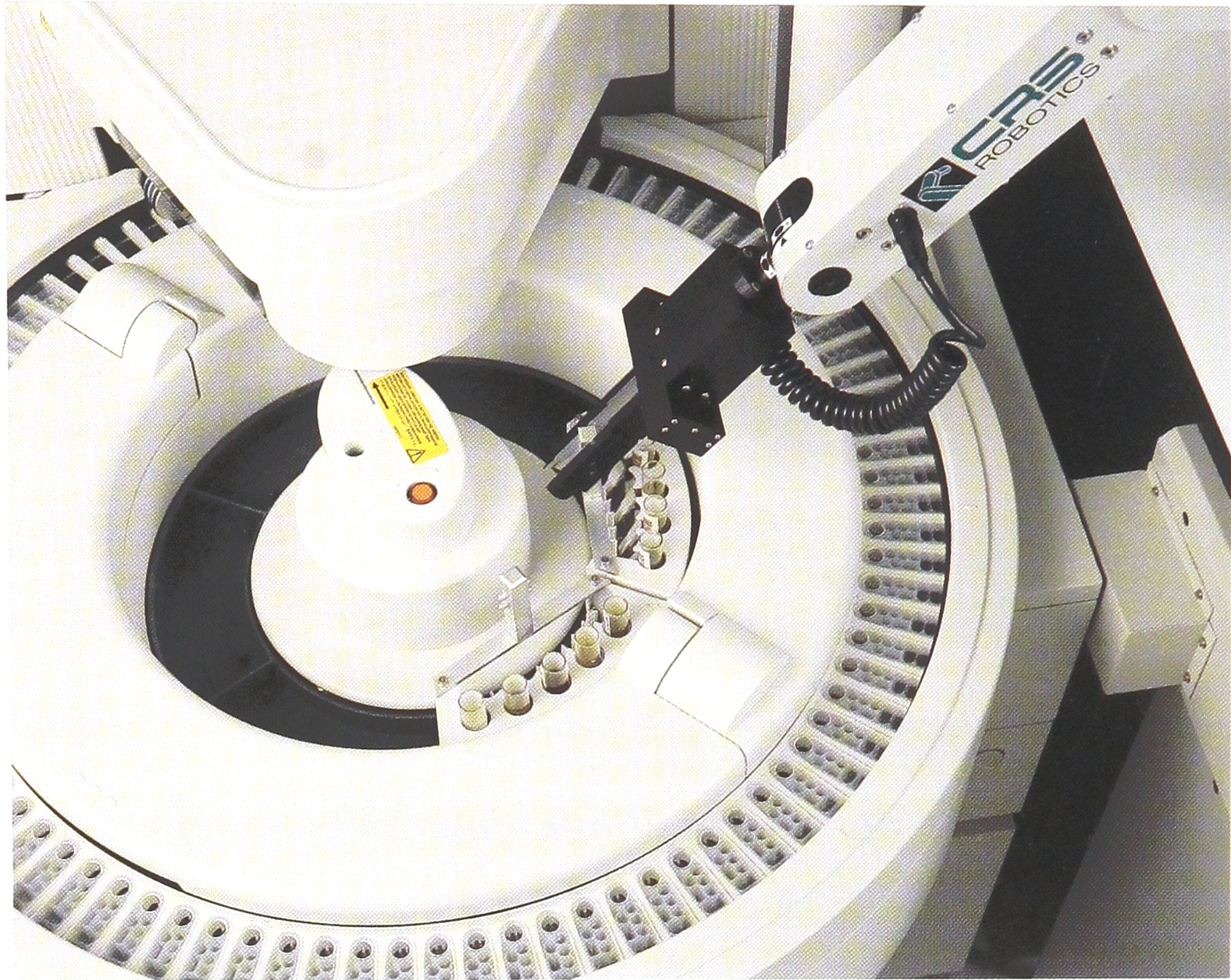
The Abbott AxSYM (foreground) contains two robot compatible racks that were placed into the carousel by the CRS robotic arm (top center of picture). Specimens are automatically removed from the “U lane” extension from the main Coulter/IDS conveyor belt. Specimens are automatically centrifuged, decapped and transported by the Coulter system. The automated instrument interface can process specimens faster than the arrival rate from the conveyor belt. Additional specimens may be added to the AxSYM manually without interfering with the automated process.
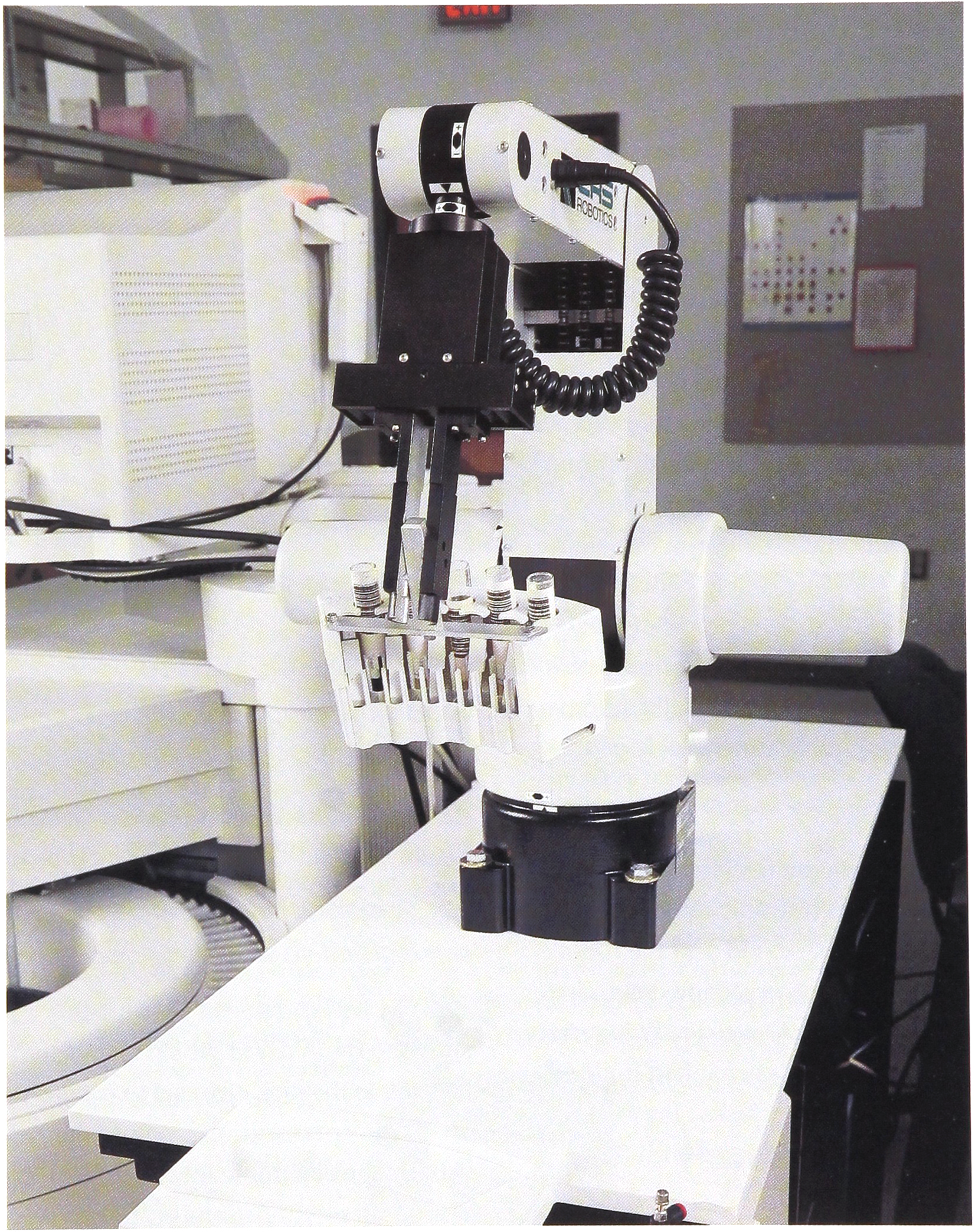
The arrival of specimens at the automated instrument interface is detected by special sensors. Detected specimens are automatically rotated to find the position of the bar code, picked up by the robot arm, and placed into a modified Abbott rack.
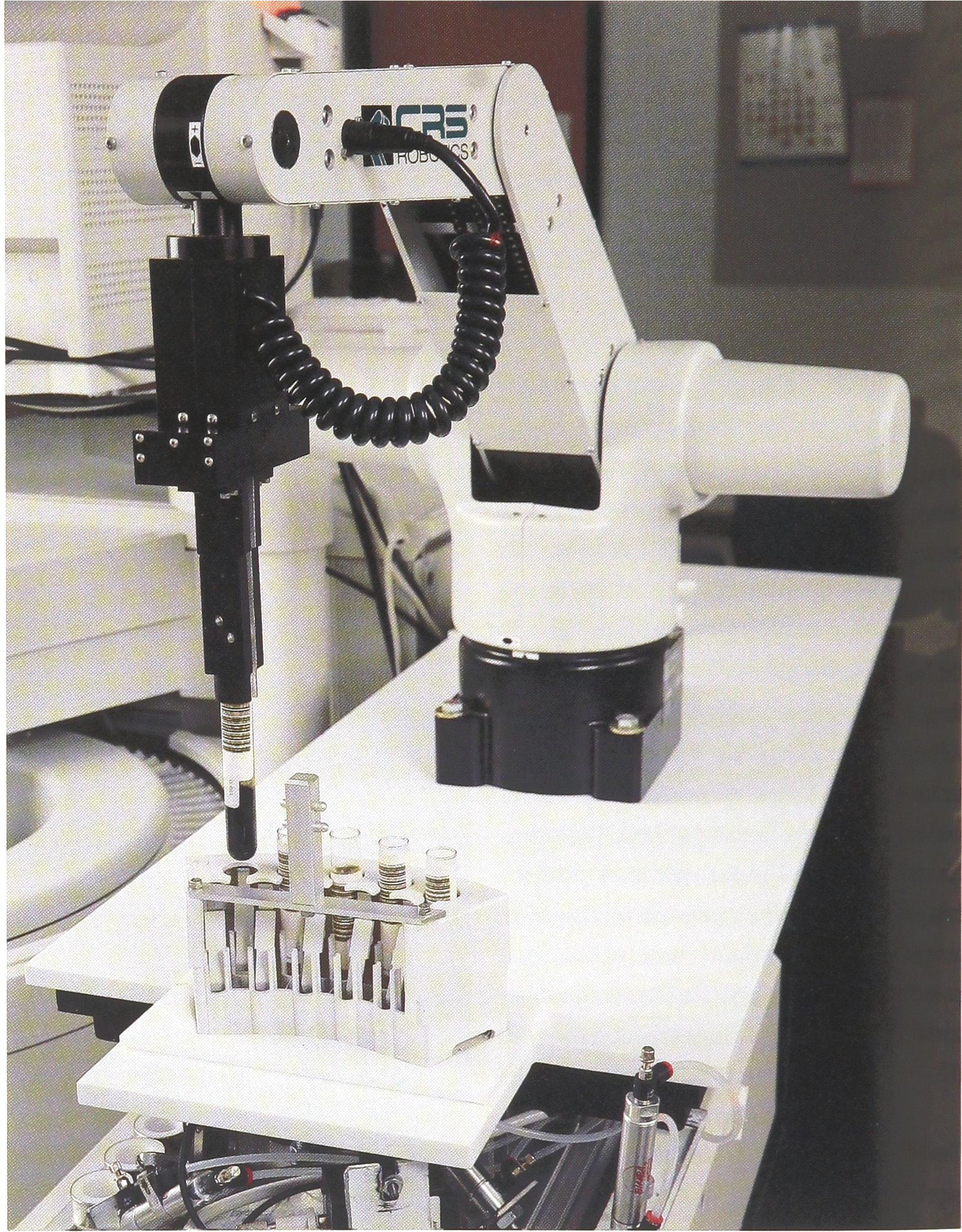
The Abbott rack is picked up by the robot fingers for placement in the AxSYM, or for placement in storage until the AxSYM is ready to accept additional specimens.
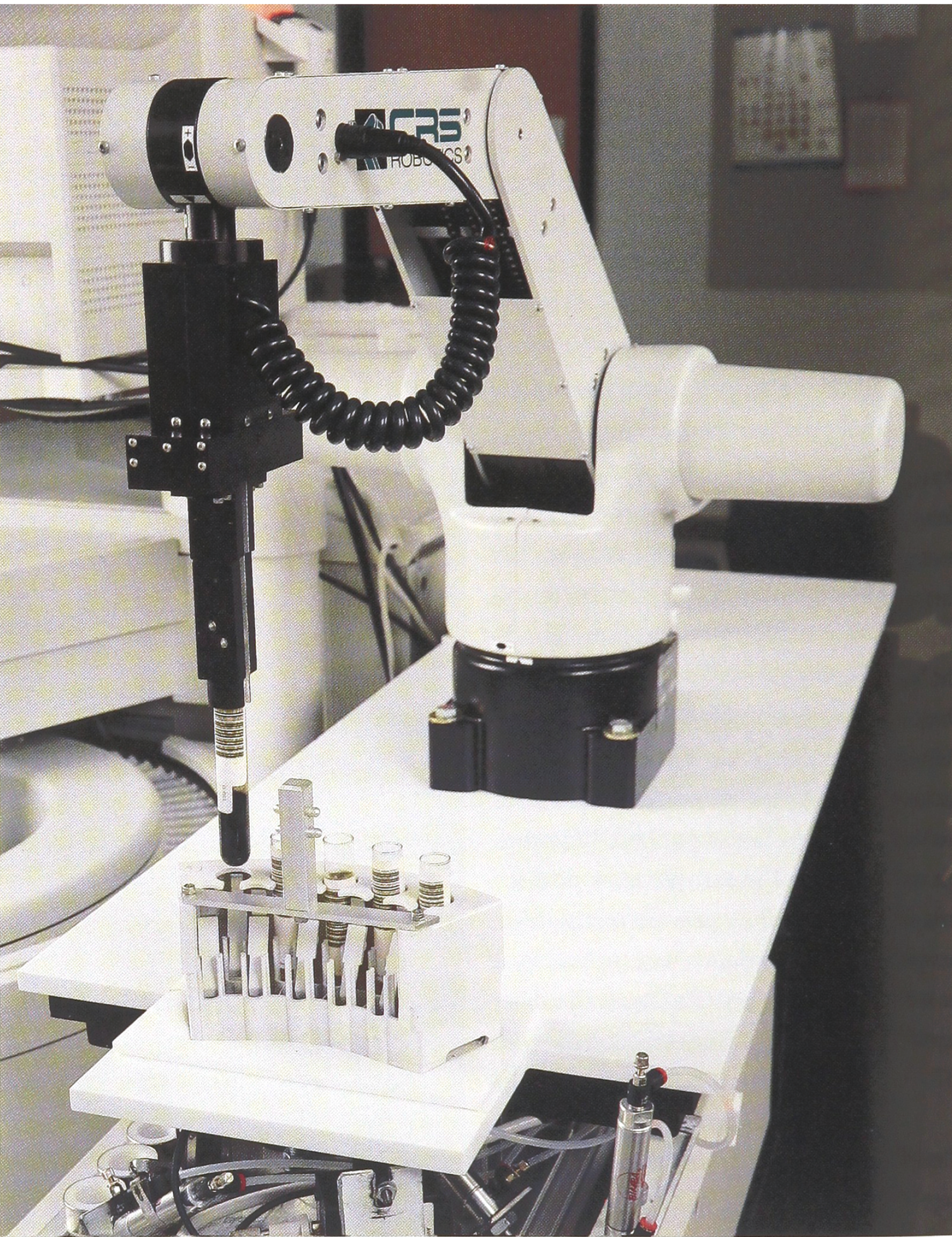
Racks are either inserted or removed from the carousel by the robotic arm. Either two or three carousel positions are reserved for robot access. The remainder of the carousel positions are reserved for manual loading of STAT or non-standard sized specimen containers.
Once the specimen had been analyzed, the process was reversed. The rack was removed from the AxSYM, placed into the holding area in front of the robot, and specimens were returned to transport pucks on the conveyor belt. A sensor was used to detect the placement of a completed specimen in the transport puck so that a pneumatic cylinder arm was retracted to allow the puck to pass back into the main lane of the conveyor.
DISCUSSION
We demonstrated that conventional analyzers can be used in conjunction with a LAS when a mechanical and electronic interface device is employed. The advantage of using conventional instruments is that many more choices are available for performing immunoassay, toxicology, and chemistry. Currently, there are only a few analyzers that are compatible with LAS technology. Interfacing conventional analyzers allows laboratories to wait until analyzers that are fully automation compatible are available on the market.
The instrument, LAS interface employed one electronic connection between the AxSYM and the robot. The interface was used to determine when the AxSYM was ready to receive a new rack and when it had finished with its analytical tasks. Furthermore, the electronic interface with the AxSYM was capable of sending a signal to the AxSYM which instructed it to rotate the rack carousel to position an empty space within reach of the robot. The electronic interface required no modifications of the existing AxSYM software.
The LAS/robot interface required no physical or electronic connection between the conveyor and the robot interface. Pneumatic cylinder arms were used to stop or release the specimen transport pucks by extending their cylinder arms into the transport path of the puck. Specimen detection, bar code reading, and puck rotation were effected from the interface platform. When no interfaces are created between the conveyor and the interface device, then it is easier to determine which system and vendor is at fault when specimens cannot be processed properly.
In preliminary timing studies it was determined that one AxSYM with an associated loading/unloading interface can process specimens as fast as the IDS conveyor belt can deliver them. There would be no inherent throughput advantage to coupling two AxSYMs to the interface device except that immunoassay and toxicology could be placed on a dedicated analyzer, or that one can be used as a backup. Loading 120 randomly arriving specimens into the AxSYM per hour would take up the time of approximately 1 full time employee (FTE).
Therefore, preliminary calculations suggest that each instrument interface would save as much as one FTE per day. Additional savings could be realized when one considers the increase in operator satisfaction, reduced errors, and more consistent throughput as a result of automating specimen loading and unloading.