
Abstract
Ligand Pharmaceuticals' New Leads Discovery department adopted a workstation approach to automating its screening assays in order to increase productivity. This approach stressed optimizing assay work flow and implementing stacking workstations, which allowed capacity to increase tremendously. However, this approach required operator intervention, therefore ultimate capacity was limited by head count and available hours for operating the equipment. A fully automated robotics system for performing the cell-based screening assays would allow for increased capacity without an increase in labor. In effect, the new system provides an operator-less second shift.
System requirements included modularity and flexible scheduling software so that the system would complement the existing work flow in the lab, as well as afford rapid assay development and deployment. Ligand's cell-based screening assays require assay cell plates to be incubated at a constant temperature, relative humidity and CO2 (37° C, 95%, 5%, respectively). The robot must be able to rapidly access the cell plates without perturbing the incubator environment.
(Perturbances cause erratic baseline readouts, particularly along the edge of the microtiter plate). Ligand compound plates contain a non-renewable resource of novel compounds dissolved in DMSO, so 1-μl pipetting ability was also a system requirement.
After an extensive vendor evaluation, CRS Robotics was selected to build the system. Key factors in the decision were the proven reliability of the CRS robotic arm, their reasonably flexible software and Ligand's confidence in the ability of CRS to build or customize peripheral devices to meet the assay requirements. At the time of purchase, CRS was the only vendor to offer a field tested pipettor capable of 1-μl delivery. CRS was also willing to guarantee on-time delivery, which was particularly important since this was Ligand's first robotics system.
System Description
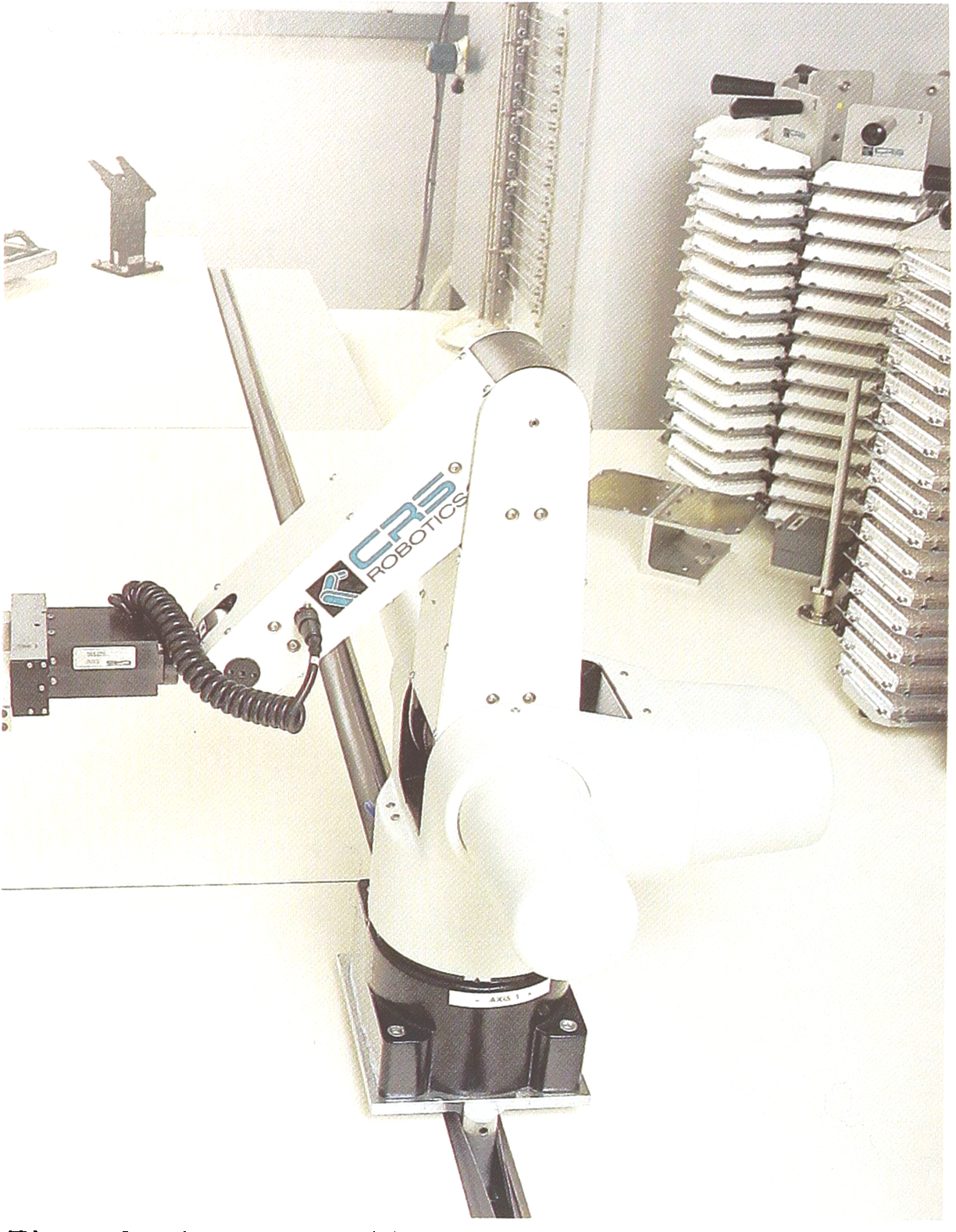
The core of this system is a CRS Model A265 robotic arm mounted on a three-meter track [Figure 1], The arm is used to move microplates in order and to access the peripheral devices. The peripherals include: a Robbins Hydra 96-well pipettor, a modified Hot Pack Model 3103D tissue culture incubator, a custom CRS reagent addition station, a Cambridge Model 7715 Luminometer, a Symbol Technologies barcode scanner, a Bio Tek EL304 plate washer and two rotating plate carousels. The robotic assay cycle consists of the following steps:

Modified hotpack incubator with a 120 position microplate carousel and pneumatically actuated door? which allow the robot to access microplates without disturbing the environment.
The arm removes an assay plate containing cells and media from the incubator, uncovers it at a place-station and then scans its barcode label for identification and downstream information processing. Media is then aspirated from the plate by the platewasher, followed immediately by addition of fresh assay media using the reagent addition station. The assay plate is then placed onto the pipettor shuttle. A compound plate is removed from its carousel, uncovered at a place-station, its barcode label is scanned for its unique identifier and the plate is placed onto the pipettor shuttle. The pipettor transfers 1 μl from the compound plate to the assay plate, followed by a mix step. The compound plate is then covered and returned to its storage position in the carousel. The assay plate is incubated at 37° C, 5% CO2 and 95% relative humidity for five hours. Following incubation, the arm retrieves the appropriate assay plate from the incubator, puts it into a place-station, then removes and discards its cover. The media is aspirated by the platewasher, then the reagent addition station dispenses detergent containing buffer to lyse the cells and release the enzyme luciferase. The assay plate is incubated in a plate carousel for 20 minutes at ambient temperature. After incubation, the reagent addition station dispenses the luciferin substrate reagent and the plate is read in the luminometer. The system capacity is 120 plates with a throughput of 48 plates in 14 hours. Compound and assay plates can be added to the system without interrupting the assay in progress.
System Peripherals Devices
The arm and peripheral devices are controlled by two C500 controllers (master and slave) that execute programs written in CRs' RAPLI1 control language. CRs' Skeduler is a flexible software package for static scheduling of the assay method. It generates a sequence of calls to RAPL programs that determine how to process the plate. This sequence is then downloaded to the C500 controller via Robcomm. Once control is passed to the C500 controller, the system operates independently of its host PC. Robcomm is the peripheral control and communication module editor and provides real-time system monitoring via a DDE link to the C500 controller. This allows the operator to receive error messages as well as remotely control or communicate with the system.
The Robbin's Hydra is a 96-syringe pipettor that has been modified with a three-position plate shuttle. The three positions on the shuttle are for an assay plate, a compound plate and a wash station. The slave C500 controller operates both the Hydra and plate shuttle. The pipetting process consists of drawing up a 5μl air gap, picking up 1μl from the compound plate, then dispensing 6 μl into the assay plate, followed by a mix cycle. The wash station is moved to the appropriate position for cleaning the syringe needles. The wash station consists of a removable block, a peristaltic pump for circulating wash solution and a five gallon reservoir of 10% ethanol. The wash solution is circulated while the Hydra picks up and dispenses 100 μl three times. The precision for this pipetting method is <7% with carryover of <1 part in 5,000. Both of these values met specifications deemed adequate for effective high-throughput screening of random chemical libraries.
An automated high throughput screening system with a capacity of 120 plates and a throughput of 45 plates in 14 hours. The system features flexible scheduling software and a modular design which allows the system to be easily reconfigured for running multiple assays.
The Hot Pack incubator was modified with 15 miniature pneumatically actuated doors, a rotating 120-plate carousel and sensors for detecting opening and closing of the main incubator door (Figure 1). The combination of miniature doors and the slowly rotating carousel minimize environmental perturbances and edge effects caused by the robot accessing the incubator. The sensors on the main incubator door prevent the robot from accessing the incubator and the carousel from turning while an operator has the main door open. The sensor state determines the color of the signal lights which are used to indicate when it is safe for the operator to access the incubator. Semi-sterile conditions are required for the longer incubation assays. The Hot Pack incubator has an automated decontamination cycle that allows easy cleaning without removal of the carousel racks or prolonged downtime.
The Cambridge Model 7715 Luminometer is controlled by a custom Windows-based interface program executing on a slave PC The C500 controller sends the assay identifier, barcode information and position in the carousel for the compound and assay plates to the luminometer program. The barcode information contains the assay number, the unique assay plate number and the default gain setting for reading the plate. The program sets the gain, then reads the plate and captures the data. The results are scanned for out-of-range messages. If any are found, the gain setting is adjusted, then the plate is re-read. A data file is created for each plate read by the luminometer. The assay information required by the data management system's import routines is written into the data file as headers. The headers allow for data uploading and analysis along with assay report generation without the need for manual data entry. This feature provides for ‘turnkey’ high-throughput screening.
The CRS reagent addition station consists of three Cavro 8-channel syringe devices and a movable shuttle for properly positioning the plate. The station has a pipetting range of 10 to 200 μl and can dispense 50 mL into a plate in 45 seconds at < 2% precision. A priming boat is being added to the station to allow for automated priming of reagents. This will be especially helpful with the light-sensitive luciferin reagent, allowing it to be primed immediately prior to use in the assay.
A plate storage carousel consists of eight removable, 15-position plate racks mounted on a rotating base. The C500 controller rotates the base so each rack is accessed from the same 15 positions. This allows the operator to teach the first and last access positions for only one rack, as opposed to teaching these positions for each rack. The scheduler references the carousel as if it were one rack of 120 plates. This allows plates to be added to an assay without interrupting the system. The drawback to this approach is that at this time, an assay can only be started from the first index position, which limits the ability to process independent assays simultaneously.
The system is capable of recovering from most plate handling errors. It recognizes when an error has occurred and flags the plate as variant, then continues processing the rest of the assay. If a plate that has gone into an instrument does not come out, the system prompts for operator intervention, The operator clears the error, then presses the acknowledge button and processing continues where it left off.
Summary
The CRS automated robotics system for performing cell based, high-throughput screening assays has allowed production output to increase by 50%, or 20,000 compounds per week, without any increase in staff. The system has, in effect, provided an operator-less second shift. Modularity and flexible scheduling software allow each instrument on the robot to function as an independent device operating under ‘infinite loop’ control. The operator can add assay and compound plates to an assay being processed without interrupting the system. Error recovery routines allow the robot to automatically recover from most plate handling errors. If the system can not recover from an error, the operator is notified by changing the system status light to red and displaying a prompt on the host PC. After the error is manually corrected, the system can continue processing where it left off by pressing the acknowledge button. The system was delivered within one month of the target date and began running overnight assays within two weeks. The total time for the project from vendor selection to overnight operation was seven months.
Future Developments
The modularity of the system allows procedures to be written for using the individual stations on the robot for performing ‘infinite-loop’ tasks. These could include generating replicates of the master compound plates (daughters), making media plates for feeding the manual workstations used throughout the lab for a variety of assay procedures and completing or starting a manual assay. To complete a manual assay, an operator would process the plates up to the incubation step and then place the plates into the system's incubator. The robot would remove them from the incubator, complete the assay and generate the data. The converse is also true where the plates would be prepared on the system and manually transferred for completion on the stacking workstations. Programming and validating these procedures would take approximately one week. The ability to process multiple independent assays on the system can be added by modifying the carousel indexing to allow for positioning based on rack and shelf. The scheduler software would then be able to stagger multiple assays in the carousel. This is important in order to extend the system's functionality to cell assays which have greater than five-hour incubations. The system's operating software will be upgraded to RAPL III shortly. This will allow enhanced string functionality, greater memory capacity (the current limit to processing capacity) and improved modularity of the peripheral code modules. A vision system and modem will be integrated into the system's host computer. This will allow the robot to automatically page an operator and transmit still photos of the system when a non-recoverable error occurs. The operator could then remotely diagnose the problem and attempt corrective action or manually intervene, even during off-hours, from remote locations.
Footnotes
Acknowledgments
We gratefully acknowledge the work done by Ed Marples in New Leads Discovery at Ligand Pharmaceuticals for his dedication and insight on this project and the technical staff at CRS Robotics.