
Abstract
In this article a new method is proposed for the preselection and objective evaluation of applicants for UAV training based on HMI models and mathematical analysis. With the rising number of UAV users there is a need for their preselection and qualification based on objective evaluation of their performance to assure the safety of air operations. A system consisting of a UAV RC controller, a display, and a software solution for the measurement of potential UAV pilot reaction was created. 59 participants were given the task to move the sticks of the RC controller to the random positions shown on the display as quickly and precisely as possible multiple times in a row. Based on the recorded stick movements, the performance of the participants was evaluated using HMI models and mathematical analysis. Four key aspects were identified for the preselection and continual evaluation of the UAV pilots: Transport delay, Time to 90% regulation, Overshoot, Deviation from the target in the stabilized state. For these parameters, limit values were proposed for the preselection of UAV pilot applicants. The created system with possible expansions can be used for effective UAV applicant preselection. The research supports the aim of better preselection and effective training of UAV pilots.
Plain language summary
As the use of unmanned aerial vehicle (UAV) technologies are in the rise, there is a need for well trained remote pilots from the theoretical but also from the practical point of view. This article describes a proposed new method for the preselection and objective evaluation of UAV remote pilots. The method uses a custom training system, with a standard RC controller connected, which gives random tasks for stick movements for the remote pilots. Their reactions are then evaluated using mathematical modeling based on the parameters of the human model. The article also presents the results of the first round of tests, where four key aspects and their proposed parameters for the preselection and continuous evaluation were identified.
Keywords
Introduction
Unmanned aerial vehicles (UAVs) could be called the technology of the 21st century. The end of the 1990s and the associated advances in sensors, electronics, and electrical engineering triggered processes that are currently discussing the topic of integrating UAVs into the common airspace with ”classic” aircraft. In addition to the continued military use of UAVs, unmanned aerial systems (UAS) have been deployed in many civilian applications (Greenwood et al., 2019), from search and rescue to mapping, commercial audiovisual and various scientific activities to power line and pipeline monitoring, for example Zhang et al. (2017). They have already played an important role in natural disasters, for example Estrada and Ndoma (2019). UAV applications in smart cities are listed, for example, in Mohammed et al. (2014), where the use of UAS for traffic monitoring is discussed and, for example, emergency situations of engineering networks using wireless sensors. Scientific and technological aspects of the use of small UAVs are discussed, for example, in Braun et al. (2021), Turygin et al. (2018) or in Floreano and Wood (2015), where the authors also address the socioeconomic impact of this technology. Examples include rapid transport of medicines, cooperation with ground staff in the event of various accidents, and chemical surveys inside buildings. In relation to the recent situation regarding the COVID-19 pandemic, drug transport has become a highly topical issue, as well as the possibility of monitoring areas of interest or critical areas and people with the use of UAVs. Scientific applications have a different character, for example, long-term mapping of surface mines (Gong et al., 2019), vegetation mapping and agricultural use (Maes & Steppe, 2018), non-destructive archeology (Gavazzi et al., 2019), testing of developed sensors (Ammann & Theil, 2018), photogrammetry (Dering et al., 2020; Kovanic et al., 2021; Urban et al., 2020), etc.
Various logistics services also play an important role in the use of UAS (Skrinjar et al., 2019). Here are important representatives of multinational companies such as Amazon, Google, or Facebook. Every year, considerable funds are spent on the development of UAV technologies in the world; since 2016 they have been on the order of billions of euros (Rana et al., 2016). Although we often perceive information about the development of express courier and delivery services to be provided by UAVs from the media as an almost “ready thing,” the truth is that on a large scale this is far from the case. Within aviation, safety is primary; however, the estimated time to launch commercial services on a global scale is probably not a matter of the distant future. Some countries are actively involved in the drafting of UAV legislation, some countries have been waiting for the creation of common legislation, which they will only subsequently adopt, while their current internal rules are strictly restrictive for the operation of UAVs, complicating the development of this market. However, it is important that the aviation authorities of different countries try to work together to develop the relevant (common) legislation as soon as possible.
In general, UAVs can be divided from the point of view of autonomy into fully autonomous, semi-autonomous, and non-autonomous. The last two categories are actually unmanned aerial vehicles requiring an operator-technician for their activity, while the third category is often called RPAS - remotely piloted aircraft system. The first group, although it does not seem so at first glance, also needs an operator, but as a professional supervisor able to take control if a sudden unforeseen situation requires so. It can be concluded that the aviation and technical training of the operator (that is, the human factor) plays an important role for all the above categories of UAVs, it can be considered as an element of passive safety.
At present, in most countries that allow it, the training of small UAV operators is more of a pilot training similar to that for obtaining a PPL—private pilot license. They are required to demonstrate proficiency in a range of critical areas such as airspace knowledge, meteorology, navigation, and emergency procedures. This shared emphasis on essential aviation knowledge underscores the parallel nature of the two training programs. UAV operators must possess a solid grasp of flight dynamics, control systems, and operational limitations to ensure the safe operation of their unmanned aircraft. Similarly, PPL holders are trained to operate manned aircraft with a focus on flight control, aircraft handling, and safety protocols. The overlapping skill set required for effective operation reinforces the connection between the training of UAV operators and pilots. Moreover, the training of both small UAV operators and PPL holders encompasses practical flight training. UAV operators are required to undergo hands-on training to develop their skills in controlling and maneuvering the unmanned aircraft effectively. Similarly, PPL candidates undergo extensive flight training to develop proficiency in various flight maneuvers and procedures.
Although the mentioned training programs follow similar rules, some are not relevant to the UAV operator and do not address the technical side to a sufficient extent. The UAV operator is not a pilot in the true sense of the word, and this has long been taken into account, for example, by the US Air Force, where UAV operators have become primarily former pilots, and this is no longer the case today (Yong et al., 2015). In the European Union, the legislation states, that UAV remote pilots need to pass a theoretical exam with a set of predetermined questions, for the practical exam, however, there are no rules set for the exact progress of the examination. In most cases, where it is even needed, the applicant only has to sign a form that they completed a practical self-training. In the future, however, there is a premise of national aviation authorities implementing frameworks for the practical training and examination.
UAV technologies are currently evolving at a rapid rate, and many educational institutions, colleges or universities are trying to follow or monitor this technological progress. Many countries have also developed UAV technologies themselves. When we add to the stated facts that UAV technologies are also financially demanding and human lives may depend on their deployment, it is clear that attention must also be focused on the criteria for selecting remote pilots and their training.
Several studies focused on remote pilot preselection and the related identification of the necessary knowledge, skills, and other attributes have been published (Carretta, 2013; Pavlas et al., 2009; Szabolcsi, 2016). In the review, Howse (2011) compared eight studies aimed at identifying the necessary knowledge and skills, including the possibilities of their testing and evaluation. Despite some different requirements, there was a match in the requirements, specifically in the groups of cognitive, visual, and psychomotor abilities (some authors also mention it as multitasking—psychomotor). Of course, other attributes are also important, but research confirms that psychomotor and cognitive abilities are the most important and are also suitable for predictions for unmanned aircraft pilot training (Carretta, 2013; Paullin et al., 2011; Rose et al., 2014). In practice, there is a lack of methods based on their evaluation, although predictors for pilots exist and are used, but in some areas they either exceed the requirements or do not meet them.
Studies confirm that video game players have better results than other participants in tests of some necessary abilities, especially cognitive (specifically spatial perception, psychomotor, and reaction times), and it seems (Wheatcroft et al., 2017) that these skills are transferred appropriately to other cognitive tasks as well (McKinley et al., 2011). These areas appear to be important, not only for the creation of predictors for the selection of UAV remote pilots, but also for further training and improvement.
The current training of UAV remote pilots is carried out mainly using traditional flight simulators, which are adapted to the needs of UAV operator training (Liu et al., 2018; Wheatcroft et al., 2017), but for this purpose they have their limitations. Virtual reality is another option (Ting et al., 2018; Zheng et al., 2013), but it is more useful for training itself than for preselection. Admittedly, attention has been paid to preselection since 1998, and so far no clear criteria (predictors) or techniques for its implementation have been established.
The paper presents the created SCoPE—Stick Control Performance Evaluation system, designed for preselection of UAV remote pilots focused on psychomotor and cognitive abilities, but also fully usable for their psychomotor and cognitive improvement. The proposed system differs from existing similar approaches in that it will test and evaluate the critical skills of potential candidates using a standard RC controller used for many types of UAVs; it gives a perfect basis for the preselection and continuous training of UAV remote pilots using the same hardware as in real flight scenarios. In addition, multiple different control modes can be set up to further improve each candidate according to their performance. The method is based on the evaluation of the adepts’ responses on a system developed specially for this purpose with the help of creation of their cybernetic human model parameters.
Materials and Methods
The system described in this paper consists of three modules:
• RC controller,
• PC (including testing and evaluation software),
• display.
The testing and evaluation of the applicants is planned to be implemented in the following phases. First, a preselection of applicants using the SCoPE system (Stick Control Performance Evaluation) as described in this paper. In the next phase, after a theoretical training, flights with simulated and then real drones will follow. The training program will be concluded with a complex examination consisting of all the theoretical and practical aspects.
For the measurement and evaluation of the performance of the UAV remote pilot applicants, calculations using the HMI model are used.
The utilization of a modular system allows for the efficient selection of candidates based on various criteria. It enables the limitation of the number of candidates and the selection of individuals who are certain to reach a certain level. Additionally, it facilitates an effective and objective comparison of the performance of prospective candidates, with a focus on streamlining the preselection process while maintaining the primary objective of enhancing air operations safety.
HMI Model
In order to enhance the objectivity of evaluating remote pilots, they can be considered as regulators of the aircraft system (human machine interface—HMI) and the parameters of their cybernetic model must be addressed. This approach aims to address the mathematical description of human behavior by employing elements of automatic control, thereby serving as a fundamental mathematical model for understanding the dynamic characteristics of the pilot. By adopting this perspective, a more comprehensive and rigorous assessment of remote pilots can be achieved, aligning with the primary research study objectives.
Incorporating HMI models in the evaluation of pilots has been extensively validated in previous research studies (Jirgl et al. (2020)). These studies confirm the reliability and effectiveness of HMI models as a tool for determining the tracked “key parameters” that are crucial in assessing remote pilots. Thus, the utilization of HMI models can be considered a reliable approach, providing a comprehensive and standardized means of evaluating remote pilot performance and abilities.
The basic equation describing the mathematical model of human behavior using elements of automatic control, which can be understood as a basic mathematical model of the dynamic properties of the pilot, is as follows:

where pilot habits for a given action are represented by the gain of the system
According to the results of different research in the field (Jirgl et al., 2020), this equation can be expanded by adding more terms to the numerator and denominator, or simplified, by removing
Measurement of Response to Required Stick Movements
For the initial assessment of each individual’s parameters in the human model, we can use the most basic inputs in controlling a UAV — moving the control sticks to determined positions, since most of the small UAVs, namely the multirotor ones, use the two-sticks type of the controller.
For this, a similar measurement system was used, as in Szoke and Lipovsky (2022). The differences here are mainly in the tasks given to the test subjects.
An RC transmitter (Radiomaster TX16S) was connected to a computer running the measurement software written in the Python programming language. The four control axes of the RC transmitter were sampled with a rate of 100 Hz and a resolution of 2,000 steps (from −1,000 to +1,000 for the full deflections to either side, 0 being the center point). Figure 1 shows an example of the recorded stick movements on one axis.

Example of a stick position log.
Using “Tkinter,” a graphical interface was created that displays two rectangles as the borders of the two gimbals of the RC. Inside the rectangles, white circles with blue borders represent the actual positions of the sticks, and red circles the zones the user needs to move them, as shown in Figure 2.
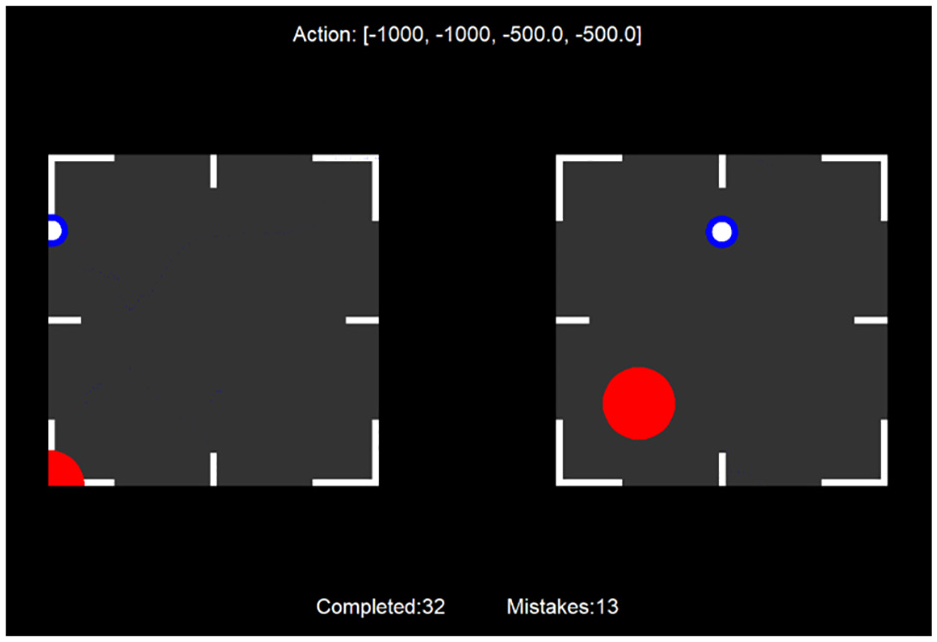
Graphical user interface of the test program—sticks not in the zones.
When the sticks enter the zones, they change color to green and the user must hold the sticks in them, as shown in Figure 3.

Graphical user interface of the test program—sticks in the zones.
A timer is started after generating a new task, which measures the time to complete the task within the set maximum time allowed. This maximum allowed time is user-selectable when starting the program. If the user is unable to complete the task in that time, it is evaluated as unsuccessful, and a new task is generated. When entering the zone, a second timer is started in the background, and after a predetermined time, the task is evaluated as successful, and a new task is generated. If the user exits the zones, the timer is reset.
For the calculation of the model parameters, the movements of the sticks from the previous to the next task would be evaluated as a reaction to a step function, the location of the center of the zone from the previous task being the 0 point, and the center of the actual task being the 1 point.
The software has four difficulty levels as follows:
• EASY—only full deflections, one stick at a time,
• MEDIUM—mid and full deflections, one stick at a time,
• HARD—mid and full deflections, both sticks together,
• ULTRA—random deflections on both sticks.
In the EASY mode, a random position is selected from the 16 possible (4 sides and 4 corners of each gimbal), which means that only one stick needs to be deflected, the other remains, or must be returned to the center position. In this mode, all 16 positions are hard coded in the software, only their order is randomized at the start and after completing all of them. The aim of this mode is primarily to test the initial reaction times, as it is impossible to make overshoots here, as the sticks physically cannot be moved more.
In the MEDIUM mode, the sticks need to be deflected either to a middle position or to a full deflection. Here, the task is given completely randomly (the seed for the randomizer is given from the time the program was started). As in this mode, still only one stick needs to be deflected, first it is randomly selected and then the deflections for that stick in the x and y axes. Meanwhile, the task for the other stick is set to zero on both axes. The aim of this mode is to measure the initial reaction times and the precision of the control at the target points.
In the HARD mode, the middle or full positions are randomly selected for all four axes of the RC, similarly to the MEDIUM mode. In this mode, the initial reaction times and the control precision at the targets are also tested, however, here the user must work with both sticks simultaneously.
In the ULTRA mode, the deflections on all axes are completely randomly chosen from the range of the sticks. While testing the program and trying to evaluate the data, it was observed, that this behavior is not adequate for our purposes, as it often gives very small changes in the location of the zones, meaning that even slight movements of the sticks can cause percentually big changes. To eliminate this issue, a deadband was set around the position of the actual task for the generation of the positions for the next task.
After starting the program, tasks are given continuously (as in Szoke & Lipovsky, 2022), either after successfully completing them or being unsuccessful. While it is running, all the sampled positions of the sticks and the required positions by the tasks are recorded to a log file for later evaluation. If enough tasks were completed (usually at least around 50–100), the measurement part of the program can be ended by flipping a dedicated switch on the RC transmitter.
After this, the software preprocesses the data from the log file based on the changes in the required positions for each task to individual segments. The stick positions are then normalized to a 0 to 1 step function based on the required positions from the previous and actual task. From these data, a standard deviation of the responses, a mean and a median time course are calculated, which are then represented in individual graphs for all control axes to the user. From these graphs, it can then be visually evaluated if the tasks were done correctly, without any exceptional errors that could cause the calculation of the model to fail.
Data Processing
After the testing of all applicants, the evaluation part of the software is started, which is a combined software solution with Python scripts to control batch processing of the individual logs and preprocessing them, and the MATLAB System Identification Toolbox for the model parameter calculation. When launching the batch processing script, three parameters can be selected: Cut length, Filter percent, and Model Type.
The first two parameters (cut length and filter percent) are used for the preprocessing of the logs. First, the ends of all individual samples are cut after the set cut length—default setting 1.5 seconds—to eliminate user errors at the ends (moving sticks too soon for the next task). Second, based on the filter percent value—default 10%—a selective dataset is created by removing the worst attempts (maximum deviations from the requested position).
The third parameter defines the type of MATLAB model to be used. After passing the logs from the Python script to the MATLAB engine, two different functions can be used: the “tfest” function for the Transfer function model, or the “procest” function for the Process model. The transfer function model gives results that match more closely the measured data; however, it returns the transfer function in polynomial form, which in most cases cannot be recalculated to the product form.
After the MATLAB functions calculate the model parameters, step functions are simulated and all the data are saved and passed back to the Python script, where the final graphs are created displaying the measured data with the mean, median, and standard deviations calculated, and the simulated model outputs with the transfer functions.
Results
Test Subjects Details
During the initial system tests in the last academic year, 59 individuals—students of the Faculty of Aeronautics were tested. For anonymization purposes, they received an identification code consisting of 5 random alphanumerical characters. They were between 20 and 29 years old (with three people over 30), as shown in Figure 4, 69% male and 31% female. Only one student had experience flying UAVs occasionally. However, 31% of the students had experience flying fixed-wing aircraft or helicopters. Furthermore, 39% regularly plays video games using controllers similar to a UAV RC transmitter.
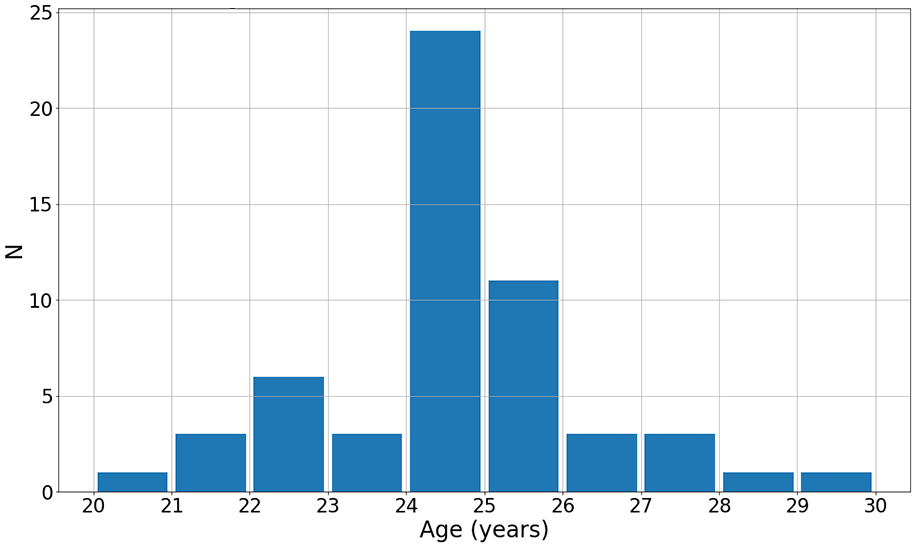
Age distribution of the individuals tested.
The evaluation process followed a sequential order, with students initially using the EASY and MEDIUM modes to familiarize themselves with the operation of the sticks and software. Subsequently, the focus shifted to the HARD mode, which yielded the most pertinent results discussed in this section. It should be noted that the ULTRA mode was deemed excessively challenging for the students during the initial evaluation, leading to a scarcity of usable data. Based on these findings, the HARD mode can be utilized for initial testing, while the ULTRA mode can be reserved for continuous evaluation and progress tracking as students become more proficient with the system.
Model Parameters Identification
For the identification of the model parameters, the following options were set for the program. As all the actions were near the steady state after 1 s, but started diverging near the 2 s mark due to the students anticipating a new task, the cut length was set to 1.5 s. The selective dataset was set, so 10% of the worst actions were removed for each individual.
An example of the comparison of the measured and modeled step responses for a selected individual for all axes is shown in Figure 5 as is the original output of the evaluation software. Note that the axes here are labeled as a RC transmitter Mode 3: AILE and ELEV are the respective horizontal and vertical axes of the left stick, RUDD and THRO are the respective horizontal and vertical axes of the right stick. It is visible here, that the modeled step responses with the given parameters closely match the means and the medians of the measured data.

Example of the step responses.
For the type of model, the estimation of the process model with 3 poles and 1 zero was the most effective, the quality of the fits is shown in Figure 6. The total count of fits is equal to 59 students times 4 channels. This setup was chosen for the reason that models with more parameters did not return significantly better results despite of the greater computational complexity; in some cases the calculated models were even worse.

Fit quality using procest with 3 poles and 1 zero.
Key Aspects for Evaluation
There are several key aspects that we can consider for the evaluation of the performance of applicants. The following figures show the histograms of the results for each, cumulatively for all four tested channels.
The first key aspect,

Distribution of the transport delay values.
The second key aspect is the

Evaluation of the rising edge.
The third key aspect,

Distribution of average values in stabilized state.
The fourth key aspect,
Figure 10 provides an overview of the maximum overshoot values from individual task samples. Most students aimed for precise target attainment, with minimal overshoot. However, there was considerable variation in overshoot values, and some students exceeded the target by twofold. The best value observed was 1.0, indicating that there was no overshoot, while the worst reached 2.16. This variability in overshoot emphasizes the need to assess the ability of the students to maintain controlled and stable responses without significant oscillations.
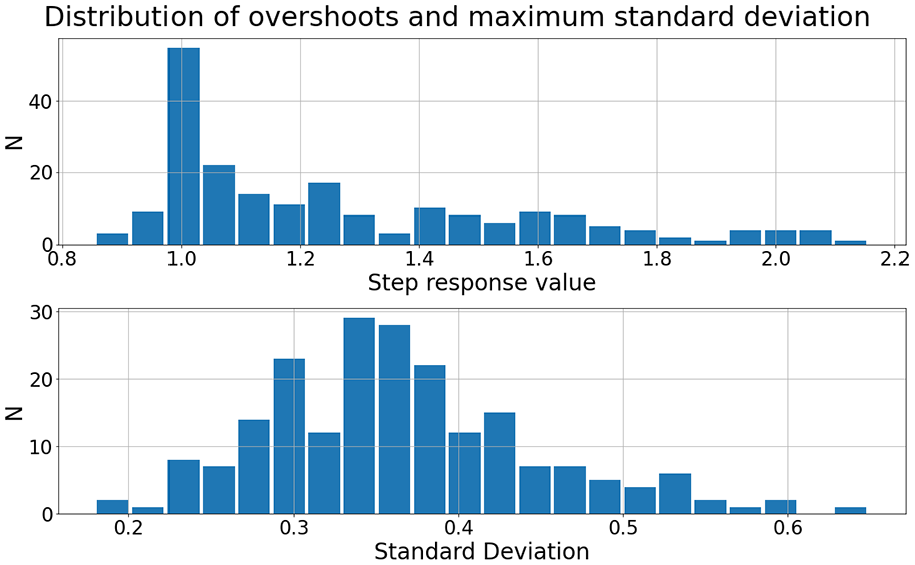
Distribution of overshoots.
Comparison of a Trained Remote Pilot with a Beginner
An important aspect of these measurements, besides the preselection process, is the possibility of tracking progress in remote pilot training. In addition to the beginners, the evaluation was also carried out on a remote pilot with one year of experience flying FPV (First Person View) racing drones.
Figure 11 shows the comparison of the modeled step responses of the experienced pilot with an average beginner (based on the transport delay and the time to reach 90%). There are four key parameters in which the experienced pilot reached better values, as shown in Figure 11.
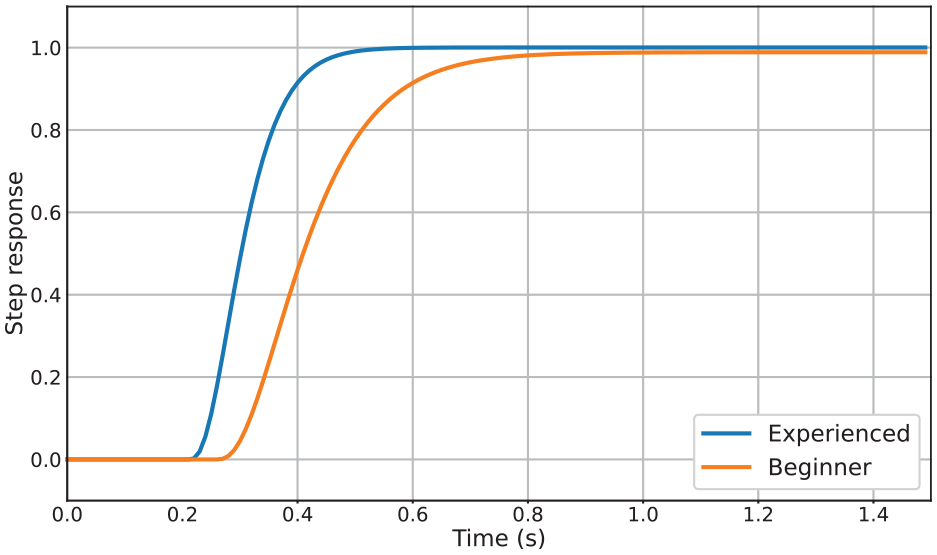
Comparison of modeled step responses.
The largest differences in the time-related parameters can be seen here, as the transport delay and the time to 90%. Based on this we can assume that, with practice, the individuals may improve the most in these parameters. As was already discussed, even the beginners were able to reach nearly perfect results from the precision point of view, there was not much room for improvement for the experienced pilot. However, he was able to reach the precise value quickly, with minimal overshoot.
The differences between the experienced pilot and the averages of the beginners are 0.6% in the stabilized value, 19.0% in the maximal overshoot, 7.8% in the transport delay, and 36.7% in the time to 90% regulation, as shown in Figure 12.

Comparison of experienced pilot to beginner.
Discussion
According to the results, there are two key aspects from the reaction speed point of view, the transport delay and the time to 90% regulation; and two key aspects from the precision point of view, which are the stabilized value and the maximal overshoot. From the results of the first batch of beginners, the following criteria can be established.
The first proposed criterium is a measured transport delay for required stick inputs less than 0.3 s. The second proposed criterium is a maximum time to 90% of 0.7 s and a rising edge gradient higher than 2.5. For the stabilized value, as most of the students were able to hit the target precisely, the third criterium for selection here may be set to a maximum deviation of 0.02. The last criterium, which is the maximal overshoot, needs more data, as there was too much dispersion in the results. However, since it is also one of the aspects that can be improved the most with training, a generous limit of 1.4 for individual task results with a maximum standard deviation of 0.4 may be set here for beginners. With these parameters set, on average, 75% of the beginners could be accepted for further training.
Figure 13 shows the time plots of the best and worst results of the beginners, as well as the line of the experienced pilot and the line based on the proposed maximum allowed values for selection.

Comparison of the best and worst step responses.
It is worth mentioning that different types of UAVs need different approaches from the pilot’s reactions, so these initial values could be tailored to fit the scope of the subsequent training. For example, for a racing drone pilot, the best possible reaction times are the target, even with a slight overshoot (as it is also common practice with setting the PID regulators of these types of UAV). On the other hand, for the pilot of a camera drone in a professional film production, the maximal smoothness of the operation is the key; here slower regulation slopes could be accepted, but almost zero overshoot.
An entirely different category is made by intercept drones, which are beginning to occur nowadays (Vrba et al., 2022). Their purpose is to intercept, safely stop, or take down the UAV intruder in perimeters with special rules, for example, near airports, power plants, and similar. In that case, the pilot must have quick reactions, but also be precise enough to be able to intercept/capture/take down the intruder. It is one of the fields that may have the most stringent criteria.
Another approach for optimizing UAV pilot training and evaluation at the beginning is to determine the most suitable control mode. Figure 14 shows the distribution of transport delay values per control channel and Figure 15 the individual results. On the basis of the individual results, personalized setups may be suggested, according to the type of operation and the priorities of the control axes. This way, the UAV remote pilots can control the most important axes of the UAV more effectively, based on their attributes.
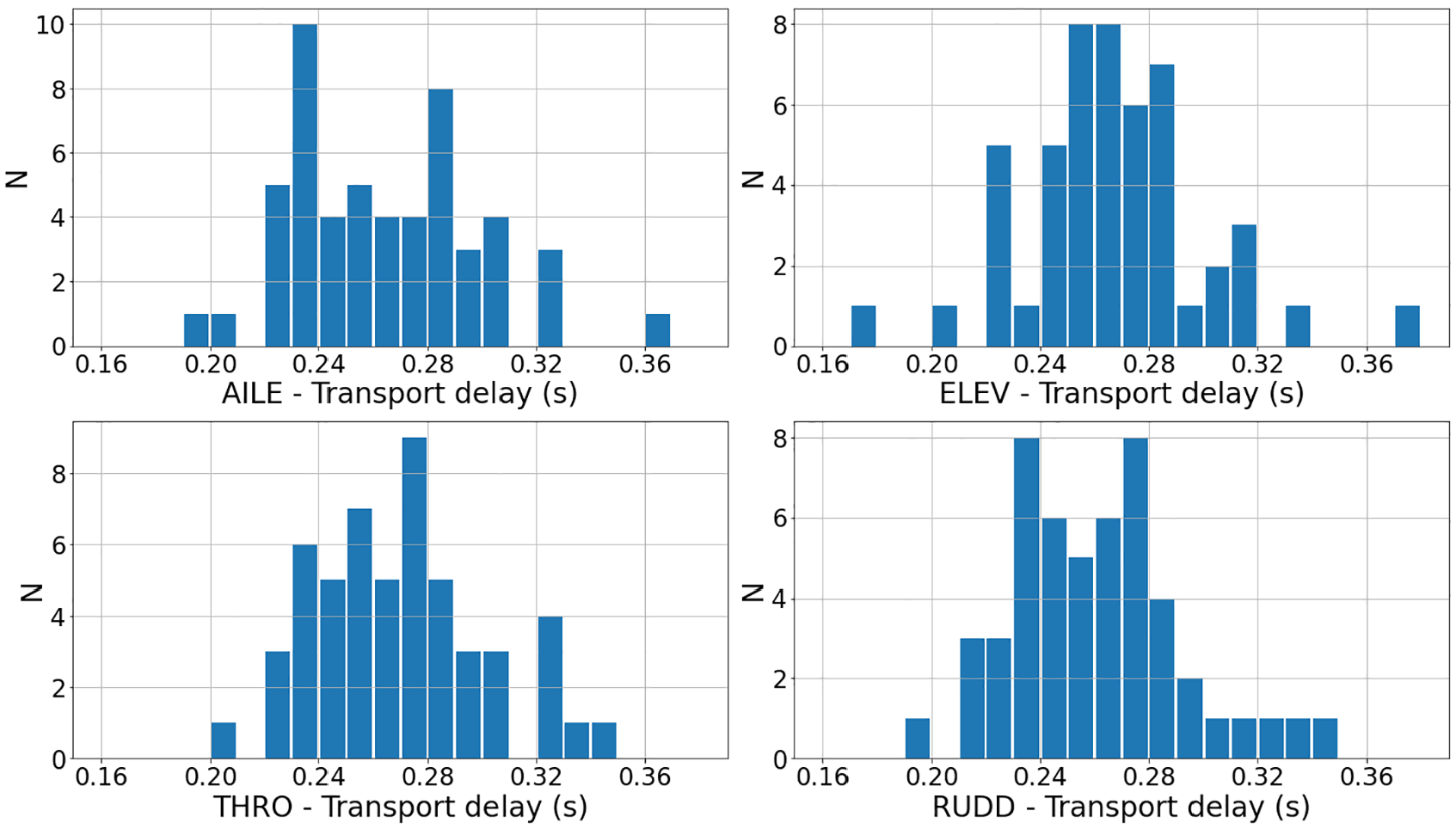
Distribution of the transport delay values per channel.

Transport delay values of individual test subjects.
In the future, it is recommended to implement a training and examination process for UAV pilots similar to obtaining a driver’s license. This approach would standardize training, evaluation, and certification, improving safety and competency in UAV operations. The process would include theoretical knowledge tests, practical training sessions, and formal examinations to assess pilots’ understanding and skills. Upon successful completion, pilots would be awarded a UAV pilot’s license or certificate, indicating their qualification to operate UAVs in specific categories or classes. This driver’s license-like system would ensure standardized proficiency, promote responsible UAV use, and enable effective regulation of UAV activities for enhanced safety.
Conclusion
Unmanned aerial vehicles are currently widely used in various industries and applications and are increasingly available to the public. To ensure the continuity and especially the safety of air traffic, despite the increasing number of users of unmanned aerial vehicles and professional UAV operators, it is necessary to create appropriate conditions for their training, starting with the preselection of applicants based on mathematical parameters and values, focusing on the abilities (perceptual speed, control precision) and skills (multitasking—psychomotor and visual), according to Howse (2011).
A system was created for measuring the user input on the control sticks of an RC transmitter, based on visual clues. The task of the user was to move the sticks to the positions displayed on the PC screen as quickly, and as precisely as possible. Subsequently, using mathematical modeling with the human model parameters and statistical analysis, basic criteria were proposed for the applicants; however, they can be adjusted for the needs of each small UAV type and the training organization needs. In the future, based on experiences, widely accepted minimal criteria can be specified. However, this requires much more data and further research.
The test measurements were carried out on 59 individuals—faculty students—and based on their results compared to the trained individual, the following four pre-selection criteria were proposed to achieve compliance 75%: for the determination of perceptual speed abilities, a maximum transport delay of 0.3 s, maximum time to 90% of 0.7 s; for the control precision abilities, a maximum deviation in stabilized state of 0.02 and a maximum overshoot of 1.4 in individual task results with a maximal standard deviation of 0.4 for beginners. However, further tests will be carried out to fine-tune these values.
Future research involves an expansion of the study to further explore the dynamics of pilots, specifically focusing on their response to the task of moving a simulated UAV to the displayed zones to assess the pilots’ performance in this particular scenario as a next step. Additionally, the evaluation of pilot performance will be extended to include flights with real UAVs tracked in a 3D space. It should be noted that the current pilot study did not include personality tests, as the primary emphasis was on the technical and modeling aspects of the process. However, in the subsequent study, comprehensive personality tests will be integrated to gain a more detailed understanding of the factors that influence pilot performance, in conjunction with the established technical and modeling parameters.
Furthermore, it is crucial to examine the potential adaptability of the proposed system beyond its current scope. Based on the findings of this study, it is suggested that the system shows promise for being adapted for use in other fields, such as autonomous vehicle technology or medical training. By exploring the feasibility of integrating the system into these domains, new avenues for its utilization can be uncovered, potentially leading to advancements in autonomous vehicle operations or medical simulation and training. The investigation of cross-disciplinary applications will contribute to enhancing the overall impact and relevance of the research, facilitating broader practical implementations in various industries.
Key Points
• A combined hardware and software solution was created for the measurement of the reactions of UAV pilot applicants and their objective evaluation.
• For testing, 59 students tried and verified the functionality of the software, where they had to move the sticks of a UAV RC transmitter to the points displayed on the screen.
• Based on the results, four key aspects were identified for the preselection of UAV pilot applicants and limit values were proposed.
Footnotes
Acknowledgements
This work was supported by the project KEGA 045TUKE-4/2022 “Support of Specialized Education of Small Unmanned Aerial Vehicles’ Operators” and by the project “Mobile Monitoring System for the Protection of Isolated and Vulnerable Population Groups against Spread of Viral Diseases,” ITMS code 313011AUP1, co-funded by the European Regional Development Fund under the Operational Programme Integrated Infrastructure.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research paper was funded by the project “Mobile Monitoring System for the Protection of Isolated and Vulnerable Population Groups against Spread of Viral Diseases,” ITMS code 313011AUP1, co-funded by the European Regional Development Fund under the Operational Programme Integrated Infrastructure.
Ethics Statement
Not applicable.
Data Availability Statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.