
Abstract
This study examined the effect of resistance barriers on alternative attractiveness of service robots and intention to use to explain the effect of innovation resistance against such robots on customer behavior. An online survey was conducted with South Korean customers who had used hotel rooms in the past year. This study tested its hypotheses with partial least squares–structural equation modeling. The results indicate that usage barriers related to customers’ familiarity with use and tradition as well as image barriers caused by psychological instability and decreased alternative attractiveness. However, the value and risk barriers based on technological level had no significant effect on alternative attractiveness. The results show that alternative attractiveness increases intention to use; however, alternative attractiveness affected by resistance barriers decreases intention to use. This study broadens the research scope by applying the innovation resistance theory to prior service robot literature with pro-innovation bias. Hospitality managers can refer to these results to design service environments that can lower the resistance barrier against using service robots.
Keywords
Introduction
Industry 4.0 technologies are integrated into business and have a considerable influence on innovation in the hospitality industry while also providing both opportunities and challenges (Osei et al., 2020). Service robots, which are “system-based autonomous and adaptable interfaces that interact, communicate, and deliver service to an organization’s customers” (Wirtz et al., 2018, p. 909), are representative of Industry 4.0 technologies in the hospitality industry. Previous literature found that the potential for robotics to lead a change in the hospitality industry’s business and service environment could be tremendous (Osei et al., 2020; Tung & Au, 2018). Indeed, service robots enhance competitive advantages and serve as a marketing tool for hospitality companies; thus, the robots are infiltrating to the service environment of the entire industry (Lin & Mattila, 2021). Furthermore, the application of robotics has led to fundamental changes in how service encounters function and in customers’ hospitality experiences and behavior (Qiu et al., 2019; Tuomi et al., 2021).
In the hospitality industry, service robots have become a major research subject along with innovation (Ivanov et al., 2019; Tussyadiah et al., 2020). Although service robots have attracted extensive attention from researchers, the scope of research is limited to discussions on the adoption of service robots and the adopters’ characteristics (de Kervenoael et al., 2020; Ivanov & Webster, 2021; Lee et al., 2021; Qiu et al., 2019; Shin & Jeong, 2020; Yu & Ngan, 2019). These prior studies emphasized that identifying the factors that influence customers’ adoption of service robots is important for accelerating the success of innovation under the assumption that customers are willing to change and will try to adopt new technology (Leong et al., 2021). However, the introduction of service robots into the hospitality business paradigm, which relies only on human services, is an unprecedented challenge; therefore, service robots may clash with customers’ current patterns and experiences and may face strong resistance (Osei et al., 2020). This phenomenon causes customers to avoid service robots; thus, comprehensive knowledge needs to be developed to understand the problems that inhibit the diffusion of innovation (Stankov & Gretzel, 2020; Tussyadiah et al., 2020). Nevertheless, the tendency of prior literature to be biased toward the adoption mechanism limits the provision of theoretical evidence that can explain customers’ resistance to service robots.
Owing to changes in the business paradigm caused by service robots, robots will replace human staff and play a service provider role (Seyitoğlu & Ivanov, 2020). Therefore, previous studies emphasized that service robots will replace human staff and integrate with the customer’s service experience (D. Huang et al., 2021; C. M. Kuo et al., 2017; Seyitoğlu et al., 2021). When a customer feels that the new service is more attractive than the current service, the new service is adopted by the customer (R. Z. Kuo, 2020; Liao et al., 2017). Moreover, alternative attractiveness has a strong influence on innovation values and customers’ behavioral intentions toward innovation (Bonnin, 2020; Nel & Boshoff, 2020; J. H. Park & Kim, 2016). Thus, alternative attractiveness is a theoretically and practically meaningful concept that explains a customer’s behavior on innovation. Although prior literature provides strong theoretical evidence that service robots should provide an alternative attraction to successfully replace human staff, customer’s perceptions of alternative attractiveness toward service robots have not been demonstrated. Therefore, as suggested by M. K. Kim et al. (2017) and J. H. Park and Kim (2016), who emphasized the need for research on the alternative attractiveness of innovation, a study on the alternative attractiveness of service robots will provide knowledge on the use of robots as an alternative to human service. This study attempts to answer the following research questions based on the identified research gaps.
RQ 1: Which innovation resistance barriers are significant in the context of service robots?
RQ 2: How do these barriers decrease the attractiveness of replacing human staff and behavior intentions?
The main theoretical contribution of the answers to these research questions is that they can provide new insights into undeveloped but critical knowledge in the service robot literature. This study utilizes the innovation resistance theory as a theoretical lens to identify a resistance mechanism to service robots that has not been studied. This approach highlights why resistance to the adoption of service robots are formed and explores the impact of innovation resistance on consumers’ attitudes and behaviors toward the robots. The results of this study address pro-innovation bias, which is a gap found in prior literature. Previous studies that bridge innovation and consumer behavior literature have addressed alternative attractiveness to explore customers’ behavioral intentions regarding new technologies (M. K. Kim et al., 2017; R. Z. Kuo, 2020; J. H. Park & Kim, 2016). In the context of the existing literature, we investigate the effect of the alternative attractiveness of service robots compared to human services on customers’ behavioral intentions. Furthermore, this study explores the important role of alternative attractiveness in the connection between innovation resistance to service robots and intention to use such robots.
Theoretical Background
Service Robots in the Hospitality Industry
A service robot is defined as “a robot that performs useful tasks for humans or equipment excluding industrial automation applications” (ISO, 2012). In contrast, an industrial robot is defined as “a robot that can be either fixed in place or mobile for use in industrial automation applications” (ISO, 2012). Industrial robots, which were introduced in the 1960s, are considered as precursors to service robots (Chan & Tung, 2019). In the hospitality industry, robotics technology was introduced relatively late because of difficulties in providing the multi-dimensional services requested by customers (Ivanov et al., 2019). However, hospitality has become a representative industry in which the application of robots has increased with the rapid development of robotics technology (Belanche et al., 2020; Tussyadiah, 2020).
Unlike human staff, a small number of service robots can continuously perform high-intensity labor and can shoulder heavy workloads; thus, they can reduce labor costs (Ivanov et al., 2017; Qiu et al., 2019). In addition, the emotional labor experienced by human staff in service encounters decreases service performance, while service robots can continue to provide standard services without emotional fatigue (Qiu et al., 2019). Due to these advantages, service robots are considered as alternatives to human services in the hospitality industry (C. M. Kuo et al., 2017; Tussyadiah, 2020).
With the advantages of service robots, hospitality companies are increasingly using robotics, and robot staff are directly involved in service encounters, such as check-in and check-out services, concierge services, room service delivery, and food ordering and delivery (Byrd et al., 2021; Ivanov et al., 2019). In this new service paradigm, the service robots have become a service provider that determines the customer’s service experience (Qiu et al., 2019). Therefore, the positive experience with service robots leads to customer’s positive attitude and behavior (D. Huang et al., 2021; Li & Wang, 2021). According to previous literature, customers assessed service robots as superior to human services in terms of entertainment (Qiu et al., 2019; Tung & Au, 2018). Conversely, customers expressed anxiety regarding service robots as an alternative to human services by negatively evaluating interactions (Qiu et al., 2019; Tung & Au, 2018), efficiency (Leong et al., 2021), and convenience (Leong et al., 2021). As the prior literature illustrates, these conflicting evaluations of innovation influence both customers’ adoption of and resistance to service robots (Ram & Sheth, 1989).
Innovation Resistance Theory
Innovation refers to “a product or service that a customer perceives as new” (T. Laukkanen, 2016, p. 2432). Innovation resistance is “the resistance offered by customers to an innovation, either because it poses potential changes from a satisfactory status quo or because it conflicts with their belief structure” (Ram & Sheth, 1989, p. 6). Resistance and adoption were the key paradigms in previous studies that investigated customers’ responses to innovation (T. Laukkanen et al., 2007; Leong et al., 2021; Mani & Chouk, 2018). Innovation can succeed only when customers adopt it and is likely to fail if resistance is not overcome (Mani & Chouk, 2018). Therefore, understanding innovation resistance is as important as understanding innovation adoption for innovation success, but many prior studies have focused on innovation adoption under the assumption that innovation is always good and will be adopted by all customers (Leong et al., 2021; Talke & Heidenreich, 2014). In the literature on service robots, pro-innovation bias has also been demonstrated, and the Theory of Reasoned Action (TRA; Zhong et al., 2020), the Unified Theory of Acceptance and Use of Technology (UTAUT; Byrd et al., 2021; Lee et al., 2021), and the Technology Acceptance Model (TAM; de Kervenoael et al., 2020; Kwak et al., 2021; Li & Wang, 2021; Wirtz et al., 2018) have been applied to investigate the adoption mechanism of service robots.
Ram and Sheth (1989) explained innovation resistance using a theoretical mechanism in which innovation makes huge changes, and they suggested a construct of five core factors associated with innovation resistance: functional barriers (usage, value, and risk barriers) and psychological barriers (traditional and image barriers). The innovation resistance theory proposed by Ram and Sheth (1989) has become the theoretical framework for innovation resistance literature and has been applied and tested for various innovations (Kaur et al., 2020; T. Laukkanen et al., 2007; Mani & Chouk, 2018; Talwar et al., 2020). Functional barriers are more likely to arise if customers perceive significant changes and risks from innovative services (Ram & Sheth, 1989). Three barriers could be manifested in the functional barriers: usage, value, and risk barriers (Ram & Sheth, 1989). Usage barriers are related to the use of innovative services and arise when innovations are not compatible with current service usage patterns and habits (T. Laukkanen et al., 2007; Ram & Sheth, 1989), value barriers arise when innovation cannot offer strong advantages related to price or performance value (T. Laukkanen et al., 2007; Ram & Sheth, 1989), and risk barriers refer to the risks of using innovative services (T. Laukkanen et al., 2007). Psychological barriers are often created through conflicts with traditions and images (Ram & Sheth, 1989). Tradition barriers develop when innovation deviates from established traditions and beliefs (T. Laukkanen et al., 2007; Ram & Sheth, 1989) and image barriers relate to negative images of innovation (T. Laukkanen et al., 2007; Ram & Sheth, 1989).
The theoretical frameworks (e.g., TRA, UTAUT, and TAM) applied in previous studies on service robot adoption have limitations in explaining innovation resistance (Chouk & Mani, 2019). In the previous literature, the innovation resistance theory was shown to provide the theoretical insight necessary to explain customers’ innovation resistance (Joachim et al., 2018). Furthermore, the innovation resistance theory is suitable for exploring customer resistance to technological innovation in Industry 4.0 (D. Choi et al., 2020; Kaur et al., 2020; Mani & Chouk, 2018) and innovation resistance in the hospitality industry (Rodríguez Sánchez et al., 2020; Talwar et al., 2020). Therefore, this study employed the innovation resistance theory to investigate customer resistance to service robots in the hospitality industry. Previous literature found that personal characteristics influence innovation resistance (Leong et al., 2021; Mani & Chouk, 2018). Moreover, demographic factors (e.g., age, gender, and education) influence consumers’ attitudes and behaviors toward service robots (Ivanov & Webster, 2021; Yu & Ngan, 2019). Therefore, this study controlled for the influence of age, gender, and education level.
Alternative Attractiveness
Alternative attractiveness is conceptualized as a customer’s estimate of the satisfaction likely to be available in an alternative relationship (Ping, 1993). Alternative attractiveness is identified when customers perceive that alternative services have many advantages over current services (Cheng et al., 2017; Colgate & Lang, 2001; Jones et al., 2000). When customers recognize alternative attractiveness to innovative services, the psychological and practical relationship with the current services is negatively changed, and a new relationship is built with the innovative service (R. Z. Kuo, 2020; Y. Liu et al., 2016; Sibona et al., 2017). The results of previous studies indicate that the attractiveness of alternative services is a key factor in “pulling” customers away from existing services (Bolton et al., 2000; G. Kim et al., 2006). Therefore, in the consumer behavior literature, alternative attractiveness was suggested as an antecedent factor to explain customers’ behavioral intentions toward alternative services (e.g., Ghazali et al., 2016; M. K. Kim et al., 2017; R. Z. Kuo, 2020).
Recently, service robots have replaced human services in the hospitality industry because of their advantages, such as service efficiency and cost management (Ivanov et al., 2017). Before the appearance of service robots, customers’ hospitality experiences could only take place through human services; thus, customers may regard service robots as providing uncertain services (Tuomi et al., 2021; Zhong et al., 2020). Previous literature shows that it is necessary to reduce uncertainty by increasing alternative attractiveness because the uncertainty of alternative services decreases customers’ preferences (Sharma & Patterson, 2000). Moreover, alternative attractiveness is related to customers’ behavioral intentions for innovation that replaces current services (M. K. Kim et al., 2017; Nel & Boshoff, 2020; J. H. Park & Kim, 2016).
Intention to Use
The dependent variable of the proposed conceptual model is customers’ intention to use service robots for check-in and check-out services at a hotel. Intention to use is the customers’ will or plan to use a new service (Venkatesh et al., 2003). Customers’ behavioral intentions reflect their willingness to perform actual actions (Ajzen & Fishbein, 1977). Therefore, behavioral intention provides useful information for predicting customers’ actual behavior toward new services (Venkatesh et al., 2003).
In previous studies, behavioral intention was used as a key variable to explain customers’ behavior toward service robots that are in the initial stage of introduction (de Kervenoael et al., 2020; Lee et al., 2021; Zhong et al., 2020). These previous studies investigated the mechanism for increasing behavioral intention toward service robots but did not provide the antecedent factors that negatively affect behavioral intention. However, previous innovation literature has indicated that customers’ innovation resistance decreases their behavioral intention (Joachim et al., 2018; Lian & Yen, 2013; Talwar et al., 2020).
Hypotheses Development and Conceptual Framework
Innovation Resistance Barriers and Alternative Attractiveness
Customers experience a strong barrier to use when the use of service robots is unfamiliar or complex (T. Laukkanen et al., 2007). Previous literature found that unlike human services, service robots caused inconvenience for customers because of usage complexity (Byrd et al., 2021; Y. Choi et al., 2020), and were less friendly than human staff (Ivanov et al., 2018); therefore, customer’s reactions positively changed when the robots were useful and easy to use (Li & Wang, 2021). In the hospitality industry, service familiarity is an antecedent factor for innovative services to be an alternative to current services (de Kervenoael et al., 2020; C. Liu et al., 2020) because familiarity affects customers’ favorable evaluations and attitudes toward service providers (Jang, 2021). Therefore, if service robots do not provide more familiarity or convenience than human services, customers cannot internalize robot services as an alternative to human services.
If service robots are linked to a monetary sacrifice for customers or do not provide a more valuable service than current services, this becomes a significant obstacle to the use of robots (Kaur et al., 2020; P. Laukkanen et al., 2008). In the hospitality industry, service value is an important factor in determining service acceptance (Manolitzas et al., 2021; Peng & Chen, 2019) and when evaluating service providers (Wu & Liang, 2009). Customers are attracted to alternative services when they have more benefits than current services (Colgate & Lang, 2001). Applying this logic, if customers perceive the low value of service robots compared to human services, they will not accept robot services as an alternative to human services.
Barriers to access to innovation arise when customers are aware of the physical, economic, and uncertain risks of using service robots (Ram & Sheth, 1989). Due to the intangibility of the hospitality industry, customers perceive a high risk as they cannot experience service robots before they actually use them (S. Park & Tussyadiah, 2017). The lack of customers’ prior knowledge and experience is closely related to risk perception (Sharifpour et al., 2014). In the hospitality industry, the introduction of service robots is at an early stage; thus, customers’ robot knowledge and experience may be relatively scarce compared to their knowledge and experience of human services. If these propositions are valid, customers may experience risk barriers toward service robots, which could lead to a negative attitude toward them compared to human services.
Customers have been experiencing human services for a long time and have values and beliefs that lead to satisfaction and trust (P. Laukkanen et al., 2008; Ram & Sheth, 1989). Previous studies found that customers prefer current services that can maintain their values and beliefs when innovations cause unacceptable changes in their experiences (Joachim et al., 2018; Mani & Chouk, 2018). The hospitality industry has traditionally been known as a “people business” which values interactions between customers and employees; thus, customers expect interaction (K. Kim & Baker, 2019). Therefore, in the hospitality industry, if innovative services do not offer interaction experience, customers will not favor them (C. Liu et al., 2020). Given this prior literature, it can be assumed that if the traditional relationship that customers expect is not developed between customers and service robots, customers will prefer human services.
If the advantages of innovative services are not highlighted to customers, a negative image of innovation is developed and they cannot replace current services (Joachim et al., 2018; J. Kim et al., 2012). In particular, when the innovation belongs to the same category as the current services, innovative services can replace the current services only by providing a positive image to customers (Lian & Yen, 2013). These results of prior studies provide evidence that since service robots fall in the same category as human services, the unclear advantages of service robots form a negative image and decrease the attractiveness of robots as an alternative service (Seyitoğlu & Ivanov, 2020).
Alternative Attractiveness and Intention to Use
Alternative attractiveness is an important factor that induces customers’ intention to switch from current services to alternative services (R. Z. Kuo, 2020; Y. Liu et al., 2016). If alternative services are not provided or lack attractiveness, customers will continue to engage with the current services (Ghazali et al., 2016). In the hospitality industry, service provision has long relied on human staff, with no available alternatives (Zhong et al., 2020). However, service robots provide customers with service provider options (Ivanov et al., 2017). Moreover, if innovation offers customers more attractiveness than human services, customers’ intentions to use the innovation are developed (M. K. Kim et al., 2017; J. H. Park & Kim, 2016). These previous studies provide strong theoretical evidence that service robots can be chosen by customers if using them as an alternative to human services is attractive (Figure 1).

Conceptual framework.
Methodology
Data Collection
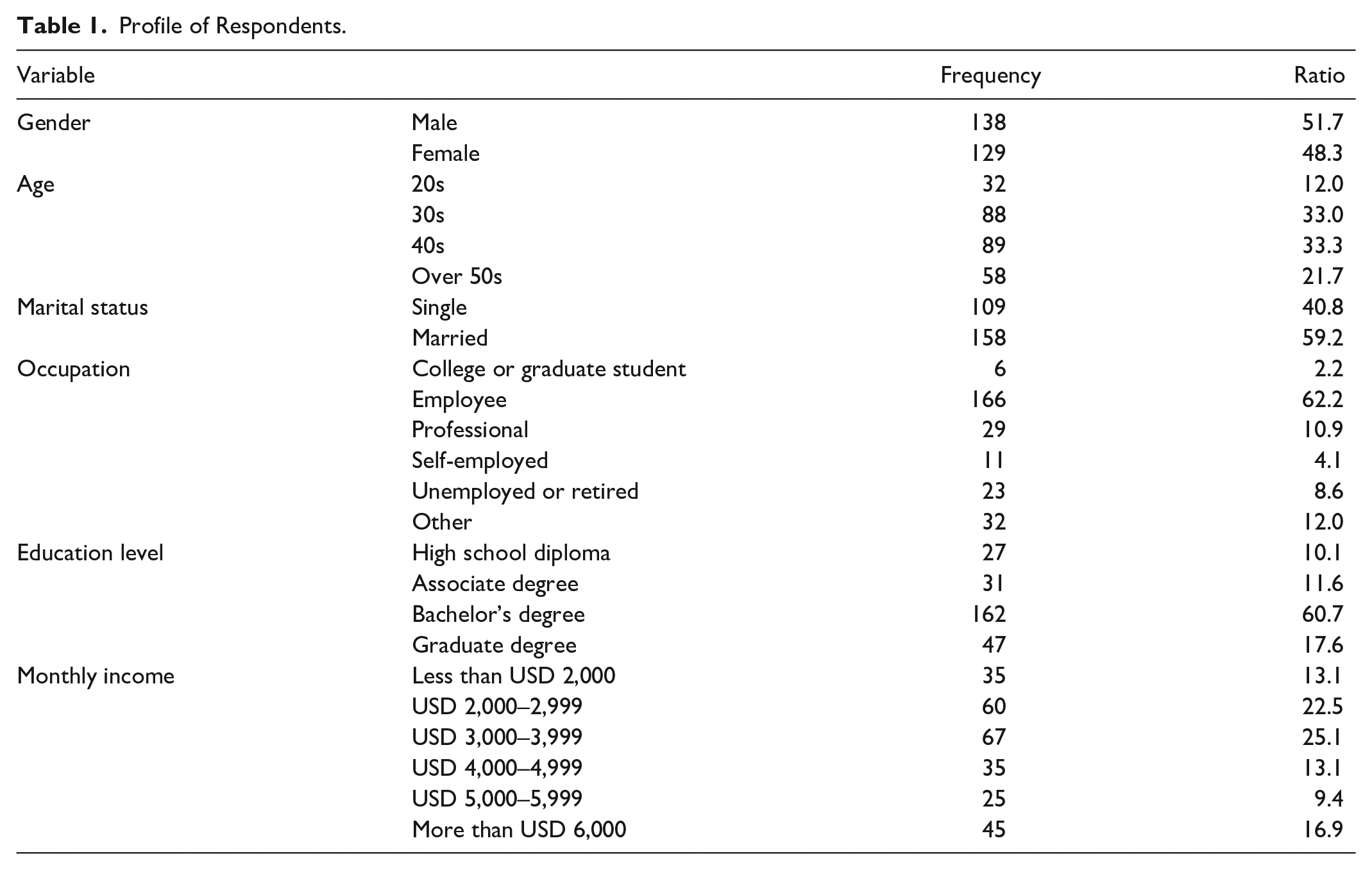
In this study, a survey methodology was adopted for data collection. The study setting was selected South Korea which is the highest concentration of robots in the world (IFR, 2018). A total of 300 questionnaires were collected between October and November 2021. Data were collected by a professional online research institute in South Korea, and the institute sent emails with a link to the survey to their panels. In this study, the judgment sampling method was used to select respondents who understood hotel check-in and out among those who responded. To collect the data, only the participants who had experienced at least one hotel stay in the past year and did not work for hospitality companies were invited to participate. Because the hotel level (e.g., star level) was not included in the context of this study, participants were not asked about the level of the hotel they had stayed in. This study provided videos to the participants, as in a previous survey-based study that provided robot videos to help participants understand service robots (Cha, 2020). As the context of this study was service robots at the front desk, where the use of robots is well known, two videos were provided to help participants fully understand how to check-in and out through service robots, and how service robots serve customers. The first video lasted 2 minutes and 11 seconds, and the second video lasted 2 minutes and 3 seconds (see Figures A1 and A2). The participants could only answer the questionnaire after they had watched the complete videos. The back-translation method was applied to all measurement items (Sim et al., 2005; Table 1).
Profile of Respondents.
Measurement
All questionnaire items in this study were developed by adapting the existing measures validated by prior researchers in the various research contexts after modifying them to suit the topic of service robots. Items for five innovation resistance barriers were adapted from T. Laukkanen et al. (2007; see Table 2). The alternative attractiveness of service robots was measured after items were adapted from Jones et al. (2000; see Table 2), and intention to use was measured using the method described by Venkatesh et al. (2003; see Table 2). All items were measured using a 5-point Likert-type scale (from 1 = strongly disagree to 5 = strongly agree). The English questionnaire was first translated into Korean by an expert who was proficient in both English and Korean and the Korean version was then translated back into English by a professional translator. In the final step, all researchers and translators checked whether the Korean version of the survey was identical to the English version and whether it was suitable for the context of this study. The initial version of the survey instrument was reviewed by five professors who are experts in the hotel management filed, and the questionnaire was refined to fit the context of this study. For this research, we conducted a pilot test with 20 customers who have had experience with service robots at restaurants, hotels, or airports, to find any errors in the questionnaire and to ensure the validity of the instruments. After the pilot test, to enhance respondents’ understanding, a video showing a manual check-in and check-out via service robots was added to the initial version of the questionnaire, which had only included a video with check-in procedures.
Results of Measurement Model Analysis.

Analysis
SPSS 26.0 and SmartPLS 3.0 were used to perform the statistical analysis of the conceptual model. Before data analysis, this study examined data screening, and a descriptive analysis was performed on the relevant assumptions. As suggested by Sim et al. (2005), a boxplot test was performed to remove extreme outliers and 33 data points were deleted. We examined the normality of the data distribution using the Shapiro-Wilk test, and the results indicated that all items were not normally distributed (p < .001). To test for multicollinearity, we examined bivariate correlations among the constructs and variance inflation factors (VIF). The model was tested using the partial least squares structural equation modeling (PLS-SEM) method, which is the most salient research method for conducting exploratory research in hospitality and tourism studies (Ali et al., 2018). PLS-SEM is free from data distribution constraints and is suitable for predictive-oriented research (Ali et al., 2018). Moreover, to minimize differences across different respondent characteristics, we dummy coded gender, age, and education level which were identified as affecting attitudes toward service robots in previous studies (Ivanov & Webster, 2021).
Results
Profile of Respondents
To select valid data, this study attempted to find missing data and response errors and performed a boxplot test to remove extreme outliers. The collected 300 pieces of data did not include missing data or response errors. About 33 extreme outliers were deleted; thus, 267 responses were used for the analysis. The proportions of male and female respondents were 51.7% and 48.3%, respectively. The mean age was 41.3 years old, and 59.2% of respondents were married. More than half were employees (62.2%), and 60.7% had a bachelor’s degree. Regarding monthly income, the group with the most responses earned between USD 3,000 and 3,999 (25.1%).
Measurement (Outer) Model Analysis
Before examining reliability and validity, Common Method Bias (CMB) was checked using Harman’s one-factor test (Podsakoff et al., 2012). The single factor variance extracted was 44.81%, which was less than the threshold of 50%; thus, CMB was not an issue. Given that the model used in this study consisted of reflective measurements, reliability and validity required examination (Hair et al., 2011). Regarding indicator reliability, the indicator loadings of each item were between .80 and .93, which were higher than the threshold of .70 (Hair et al., 2011).
Cronbach’s α, an indicator of internal consistency reliability, and composite reliability satisfied the threshold (higher than 7.0; Hair et al., 2011; Henseler et al., 2016). The AVE values that indicate the convergent validity of each construct were higher than the threshold of .50 (Hair et al., 2011). Additionally, to examine discriminant validity, this study assessed the Fornell-Larcker criterion, cross-loadings, and heterotrait-monotrait ratios of correlations (HTMT; Henseler et al., 2016). All correlation values were less than the square root of the AVE of each construct (Hair et al., 2011). Furthermore, the results indicated that all HTMT values were lower than the threshold of 1.0 (Hair et al., 2011; Henseler et al., 2016). As the above results indicate, in this study, all measurements satisfied the reliability and validity of PLS-SEM (Tables 3 and 4).
Measurement Quality and Fornell-Larcker Criterion.
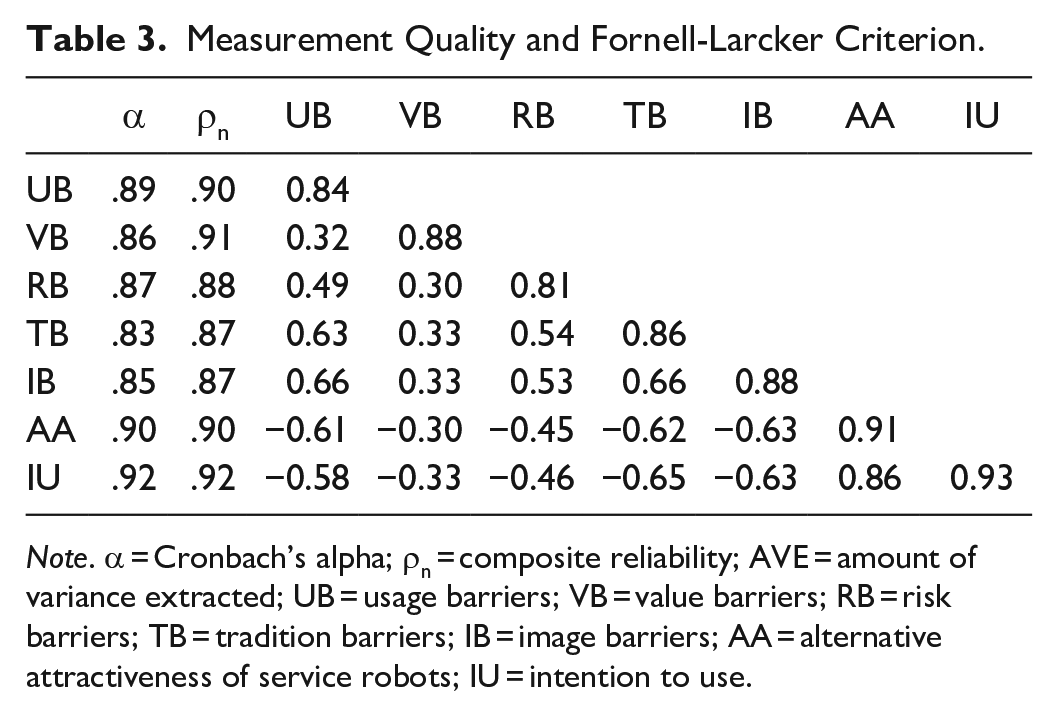
Note. α = Cronbach’s alpha; ρn = composite reliability; AVE = amount of variance extracted; UB = usage barriers; VB = value barriers; RB = risk barriers; TB = tradition barriers; IB = image barriers; AA = alternative attractiveness of service robots; IU = intention to use.
The Results of HTMT.
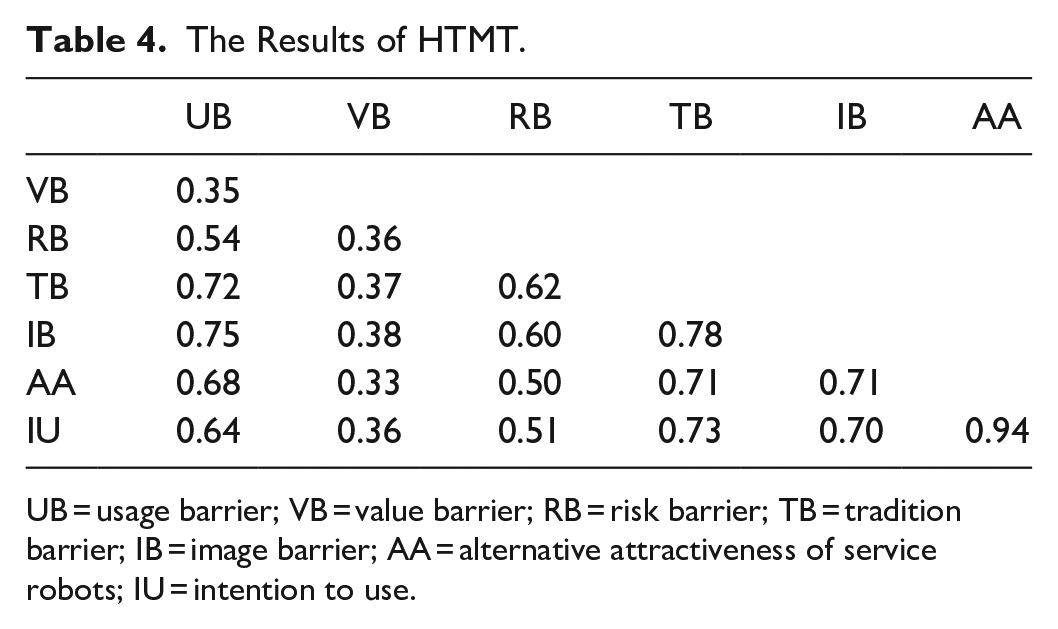
UB = usage barrier; VB = value barrier; RB = risk barrier; TB = tradition barrier; IB = image barrier; AA = alternative attractiveness of service robots; IU = intention to use.
Structural (Inner) Model Analysis
Before implementing the proposed model, multicollinearity was tested using the VIF. The results indicate that all VIF values were lower than 5.0; therefore, the model was free from multicollinearity issues (Hair et al., 2011). This study assessed Q2 of the blindfolding procedure, which is a standard approach for predicting reflective indicators (Henseler et al., 2016). Since all Q2 values were larger than the threshold of 0 (Q2AA = 0.43 and Q2IU = 0.62), the model had predictive relevance (Hair et al., 2011). For path analysis results, including gender, age, and education level as control variables, the R2 values of alternative attractiveness and intention to use were .532 and .731, respectively. This implies that the five latent variables (UB, VB, RB, TB, and IB) moderately explained 51.8% of the variance in alternative attractiveness, and that the six latent variables (UB, VB, RB, TB, IB, and AA) moderately explained 72.7% of the variance (Hair et al., 2011).
As shown in Table 5 and Figure 2, hypothesis testing results show that all hypotheses were not supported. The results indicate that usage barriers (β = −.20, t = 2.93, and p = .003), tradition barriers (β = −.28, t = 4.70, and p = .000), and image barriers (β = −.29, t = 4.42, and p = .000) had a significant and negative effect on the attractiveness of the service robots. Therefore, H1, H4, and H5 are supported. These results align with those from previous literature that found a significant effect of usage, tradition, and image barriers that cause negative customer attitudes toward new services (Mani & Chouk, 2018; Moorthy et al., 2017). According to Kenny (2021), who supplemented Cohen’s effect size (Cohen, 1988), the effect size can be represented as small (.01), medium (.09), or large (.25) by the f2 value. Usage barriers (f2 = 0.04), tradition barriers (f2 = 0.08), and image barriers (f2 = 0.08) were identified as having small to medium-sized influences on alternative attractiveness. The effect size of tradition and image barriers were the same, and stronger than usage barriers. However, value barriers (β = −.04, t = 0.78, and p = .435) and risk barriers (β = −.02, t = 0.29, and p = .771) did not exert a significant impact on the alternative attractiveness of the service robots; thus, H2 and H3 were rejected. These results are line with the results of previous studies that showed that value and risk barriers have no significant influence on consumer attitudes (Kaur et al., 2020; Khanra et al., 2021). Alternative attractiveness significant positively affected intention to use (β = .86, t = 44.76, and p = .000); thus, H6 was accepted, and this conforms with extant literature showing that positive behavior intention is led when a customer perceived the alternative attractiveness of new services (Fu et al., 2021; Ghasrodashti, 2018). The effect size of alternative attractiveness (f2 = 2.62) on the intention to use was large. None of the control variables had any significant effect on the proposed model.
Results of the Path Analysis.

Note. VIF = variance inflation factor; R2: AA = 0.532, IU = 0.731; UB = usage barriers; VB = value barriers; RB = risk barriers; TB = tradition barriers; IB = image barriers; AA = alternative attractiveness of service robots; IU = intention to use.
p < .05. **p < .01. ***p < .001.

Hypotheses testing results.
Mediation Test
Given the lack of demonstration of the alternative attractiveness of service robots, investigating the mediating role of alternative attractiveness can yield significant theoretical evidence. Therefore, although the mediation role of alternative attractiveness was not hypothesized, the mediation test was examined as a post-hoc analysis. This procedure is an analytical method commonly applied in hospitality and tourism research (Buil et al., 2016; Y. S. Huang et al., 2019; Legendre & Baker, 2020). The mediation test revealed that usage barriers (β = –.17, t = 2.90, and p = .004), tradition barriers (β = –.24, t = 4.66, p = .000), and image barriers (β = –.25, t = 4.39, and p = .000) had a negative influence on intention to use via alternative attractiveness. However, alternative attractiveness demonstrated no mediating role between value barriers (β = –.03, t = 0.78, and p = .435), risk barriers (β = –.02, t = .29, and p = .771), and intention to use. The results show the mediating role of alternative attractiveness between resistance barriers and intention to use. This result validates those of the existing literature verifying that the mediating effect of alternative attractiveness between antecedent and outcome variables (Nel & Boshoff, 2020; Picón et al., 2014). No control variable had a significant effect on the proposed model (Table 6).
Results of the Mediation Test.

Note. Bootstrapping runs (5,000); PLS iterations (1,000); UB = usage barriers; VB = value barriers; RB = risk barriers; TB = tradition barriers; IB = image barriers; AA = alternative attractiveness of service robots; IU = intention to use.
p < .05. **p < .01. ***p < .001.
Discussion and Implications
Discussion
This study found that innovation resistance barriers did not all equally affect the alternative attractiveness of service robots, and the effects on alternative attractiveness varied depending on the cause of the resistance barrier. The results show that only usage barriers in functional barriers and all dimensions of psychological barriers—tradition and image barriers—negatively affect alternative attractiveness. Additionally, the effect size indicated that the tradition barrier and image barrier were larger than the usage barrier. This is because the psychological relationship between customers and alternative services is more important than the functional relationship for the development of alternative attractiveness (J. Kim et al., 2021).
Given that the hospitality industry is traditionally a human service-oriented industry, alternative attractiveness decreases when it faces a psychological challenge that is created if customers cannot expect the established hospitality experiences provided by human staff (Tussyadiah, 2020). This is due to the fact that if customers do not recognize the advantages of service robots as alternatives for human services, the negative image of service robots is highlighted, and the attractiveness of service robots is lowered. These results align with those of previous literature that found that service robots should provide similar hospitality experiences to human staff for positive images (Qiu et al., 2019; Tung & Au, 2018). Usage barriers decrease alternative attractiveness. In the hospitality industry, because service robots are the most recent change, customers are not familiar with using robots and may perceive them as complex and difficult. Thus, customers may negatively evaluate the attractiveness of service robots as an alternative to human services (Byrd et al., 2021). These results are consistent with those from prior literature indicating that ease of use leads to positive behaviors and attitudes toward service robots (de Kervenoael et al., 2020; Seo & Lee, 2021).
The impact of resistance barriers on customer behavior and attitude differs depending on the innovation field (Leong et al., 2021). This study reveals that value and risk barriers are not statistically significant. If the resistance barriers are categorized based on the cause of creation, the value and risk barriers are closely related to the robotics level or quality. However, the three statistically significant barriers are not related to the technological level or quality, but instead are associated with customers’ familiarity, expectations, and evaluations as compared to human services. These results occurred because customers do not perceive service robots as merely technological innovations but rather as alternative services to human services; thus, barriers related to robotics level or quality do not affect alternative attractiveness. Furthermore, customers are not anxious about the technology of service robots because they have experienced various innovations (e.g., kiosks, mobile payment solutions, and food delivery applications) that have been widely diffused before the introduction of service robots (Matsuo et al., 2018).
It was determined that alternative attractiveness had a significant effect on intention to use, with a large effect size. Since service robots are an alternative to human services, it is necessary to provide customers with alternative attractiveness (Sibona et al., 2017). Furthermore, given that service robots are a completely new type of service that customers have not experienced, alternative attractiveness is an important prerequisite for being used as an alternative service. This result aligns with the results of previous studies that showed that the alternative attractiveness of innovative services affects customers’ switching from current services to new services (R. Z. Kuo, 2020; Nel & Boshoff, 2020).
The results of the mediation analysis indicate that usage barriers, tradition barriers, and image barriers decrease the intention to use via alternative attractiveness. This is because customers refuse to use service robots and maintain relationships with human services if they perceive that the advantages of service robots are relatively lacking compared to human services (Colgate & Lang, 2001). Our results indicate that tradition barriers and image barriers, which are psychological barriers, have a stronger indirect effect on intention to use than the usage barriers. This is because psychological barriers are a key factor influencing not only alternative attractiveness but also customers’ behavior (Kaur et al., 2020; Moorthy et al., 2017). Conversely, it was identified that value and risk barriers did not affect intention to use via alternative attractiveness. As noted, these two barriers are related to the technical aspect of robots, most likely because customers consider service robots as service encounter staff, not just as outcomes of technological innovation.
Theoretical Implications
First, previous service robot literature shows a pro-innovation bias, as some innovation researchers have noted (Castro et al., 2020; T. Laukkanen et al., 2007; Leong et al., 2021). Therefore, this study provides a theoretical framework that can predict customers’ behaviors and attitudes according to resistance barriers to service robots based on the innovation resistance theory. Additionally, it was found that barriers based on ease of use and hospitality experience, rather than barriers related to technical level or quality, contribute to the decrease in alternative attractiveness and intention to use. The results indicate that since customers perceive service robots as service encounter staff, the barriers caused by familiarity, convenience, and prior experience of human services, rather than technical aspects, lead to negative evaluations of service robots. In particular, the beta coefficient of the tradition barrier and image barrier is large, indicating that the psychological driver is the key to customers’ resistance to service robots. Our findings contribute to an expansion of the research scope by applying the innovation resistance theory to the service robot research domain.
Second, this study investigated alternative attractiveness which has not received the attention of service robot literature but has been widely applied to explain customers’ adoption of alternative services (Jones et al., 2000; M. K. Kim et al., 2017; R. Z. Kuo, 2020). The results indicated that when customers perceived strong alternative attractiveness, their intention to use increased. The importance of this finding is supported by previous literature that emphasized the need for alternative attractiveness research to predict customers’ behavioral intentions in the era of rapid technological innovation (M. K. Kim et al., 2017; J. H. Park & Kim, 2016). Moreover, this study highlights the need to investigate the alternative attractiveness of service robots to explain customers’ behavior toward service robots as an alternative to human services.
Third, the mediating effects of alternative attractiveness were not examined because of the lack of research on the alternative attractiveness of service robots. This study indicates that alternative attractiveness has a mediating effect between innovation resistance barriers and intention to use. What should be noted is that alternative attractiveness decreases intention to use when acting as a mediator variable between resistance barriers and intention to use, although intention to use increases when it is directly affected by the attractiveness of alternatives. This provides evidence that alternative attractiveness decreases when resistance barriers arise, which consequently reduces intention to use. The conceptual model of this study emphasizes the importance of innovation resistance barriers and implies that service robots should break down these barriers and increase alternative attractiveness as an alternative to human service.
Managerial Implications
Innovations that change consumption patterns inevitably lead to resistance (Rodríguez Sánchez et al., 2020). In the hospitality industry, given that service robots will bring enormous changes to the traditional hospitality experience, customers will show resistance to robots. Therefore, this study emphasizes that hospitality industry managers should note that service robots are not just an innovative technology but an alternative to human services. Furthermore, we suggest the importance of understanding the causes behind the creation of resistance barriers and designing a service environment that can minimize resistance barriers for service robots to highlight the alternative attractiveness of replacing human services.
Customers expect hospitality experiences that are provided by human services even when they are provided by service robots because service robots replace human staff (Tung & Au, 2018). In the hospitality industry, the interaction between employees and customers is important (Y. Choi et al., 2020); thus, to meet customer expectations, managers must ensure that service robot–customer interactions can be integrated into the hospitality experience. However, owing to the limitations of technology, it can be difficult for service robots to provide hospitality experiences that integrate the level of interaction expected by customers. In a hospitality environment where human staff and service robots work together, human staff can compensate for the lack of interaction caused by technological limitations. Even if unprecedented innovation occurs, the process of the new hospitality experiences provided by service robots should not be ignored. This study suggests a gradual increase in the ratio of service robots in staff so that service experiences from service robots can become a part of customers’ daily service experience.
Since service robots are completely new services that have not been experienced, customers may have prejudices such as ideas that the robot’s efficiency is low, and the service process is complicated. These biases can lead to a negative image of service robots and build resistance barriers to their adoption. Therefore, this study suggests managing service robots’ images so that customers can have positive images of them as a service provider. For example, positive reviews from customers using service robots can be shared on websites or social media to create such images. In the hospitality industry, given that service robots are in the introductory stage, customers may be unfamiliar with their use. The service process using service robots should be designed to be user-friendly until customers are accustomed to it. If a user manual video or QR code is attached when sending e-mails or messages for confirming room reservations to customers, customers can be provided with tools to understand how to use service robots before arriving at the hotel. Moreover, supplying the front desk with a QR code containing the service robot’s user manual could minimize unpleasant interactions caused by the barriers when checking-in or checking-out.
Limitations and Recommendation
This study has some limitations. First, service robots not only change customers’ hospitality experiences, but they also change their working environment (Xu et al., 2020). Like customers, employees may resist service robots; however, employee resistance was not included in this work as the purpose of this study was to explore resistance barriers on the demand side. This study recommends that future researchers investigate the innovation resistance barriers of employees combined with the theory of organizational behavior. Second, the innovation resistance literature posits that the effectiveness of innovation resistance changes over time (Leong et al., 2021). However, this study did not investigate the effects of time changes because cross-sectional data were used. In future research, the change in resistance effect over time should be examined by applying longitudinal data to the conceptual model of this study and testing it instead of just focusing on a particular time frame.
Footnotes
Appendix A
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.