
Abstract
Introduction
While surface-electromyography (sEMG) has been widely used in limb motion detection for the control of exoskeleton, there is an increasing interest to use forcemyography (FMG) method to detect motion. In this paper, we review the applications of two types of motion detection methods. Their performances were experimentally compared in day-to-day classification of forearm motions. The objective is to select a detection method suitable for motion assistance on a daily basis.
Methods
Comparisons of motion detection with FMG and sEMG were carried out considering classification accuracy (CA), repeatability and training scheme. For both methods, classification of motions was achieved through feed-forward neural network. Repeatability was evaluated on the basis of change in CA between days and also training schemes.
Results
The experiments shows that day-to-day CA with FMG can reach 84.9%, compared with a CA of 77.8% with sEMG, when the classifiers were trained only on the first day. Moreover, the CA with FMG can reach to 86.5%, comparable to CA of 84.1% with sEMG, if classifiers were trained daily.
Conclusions
Results suggest that data recorded from FMG is more repeatable in day-to-day testing and therefore FMG-based methods can be more useful than sEMG-based methods for motion detection in applications where exoskeletons are used as needed on a daily basis.
Keywords
Introduction
Many human activities, either occupational or in daily life, require our muscles having a certain level of strength. 1 Exoskeletons 2 have the capability to overcome the muscle strength limitation by providing power augmentation.3–6 This can contribute to enhance endurance for workers and to improve motion capability for the elderly and people with motion limitations.
In the control of exoskeletons, human motion detection is critical 7 for appropriate assistance control and human-robot interaction. Many methods have been developed, which are based on either physical or cognitive interfaces. Of them, sEMG is one of the conventional methods to determine upper limb movement activities8–16 in terms of elbow/shoulder joint angles, hand gestures and task identification. EMG based exoskeleton controls have been reported in literature.17–22 The effect of training time on sEMG based classification has also been studied earlier.23–26 The results indicate that performance continuously downgrades as the time difference between training and testing day increases. On the other hand, FMG as an alternative to detect upper and lower limb muscle activities has been used in different applications with healthy subject27–37 and with stroke/amputated subjects.38,39
Given different applications of these methods, comparisons of their performance are necessary for their proper use in applications. Some comparison works have been reported in the literature. In Ravindra and Castellini 40 the performances of using pressure sensing (FMG), sEMG and ultrasound methods for estimating finger force were reported in terms of overall estimation accuracy, change in estimation accuracy with repetition of each task (stability), wearability and cost. It was reported that pressure sensing performed well in term of accuracy and stability. In Jiang et al., 41 the performances of FMG and sEMG for recognizing hand gestures were compared. Average accuracy was reported as 87.35% for FMG and 81.85% for sEMG. Moreover, FMG performance was also evaluated by increasing the number of force sensing resistor (FSR) sensors and an increase of 5.7% in accuracy was obtained. The performances in elbow, forearm and wrist position classification were reported in Xiao and Menon. 42 The results showed that overall performances with FMG and sEMG were consistent. Study on combining both sEMG and FMG was also reported to achieve better performance. 43
It is noted that in the aforementioned studies, the performance of FMG and sEMG was compared for classifying static postures and finger force estimation. Moreover, the experiments with FMG were conducted for one-time data testing. Comparisons of day-to-day performances with the two methods are not reported yet.
In this work, we compare day-to-day performances of FMG and sEMG methods for classifying motions, including both static pose and dynamic arm movement. Our interest in this work is to understand the advantages and limitations of the two methods, in order to apply a proper method for motion assistance through exoskeletons that are used on a daily basis.
This paper is organized as follows: Materials and methods for performance testing are explained in the upcoming section. A further section presents the testing results, which is followed by the discussion in next section. The work is concluded in the final section.
Methods
Motion types
The motions studied in this work include forearm flexion, extension, pronation, supination and rest. Except rest state, the other four motion types were classified during the dynamic state. The starting and ending states of each motion are shown in Figure 1. Flexion was performed by moving the forearm from neutral to fully flexed forearm position (Figure 1(a)). Extension was performed by moving the forearm from fully flexed to fully extended position (Figure 1(b)). Pronation was performed by rotating the forearm from fully supinated to fully pronated position (Figure 1(c)) and supination was performed by rotating the forearm from fully pronated to fully supinated position (Figure 1(d)).

Starting and ending states of (a) flexion, (b) extension, (c) pronation and (d) supination.
Sensors and placement
The forearm motions are classified separately using FMG and sEMG based classifiers. With FMG, muscle activity is recorded in terms of lateral force caused during muscle deformation, whereas with sEMG the activity is recorded in terms of electrical signals.
For FMG testing, two sensor bands with embedded FSR, namely, FSR-402 developed by Interlink, were used. One sensor band comprised of six FSR sensors was placed at the middle of the upper arm. The other sensor band also comprised of six FSR sensors was placed at the forearm near the elbow joint. Figure 2(a) shows the placement of sensor bands.

Sensor placements on human arm, (a) FMG and (b) sEMG.
For sEMG testing, four pairs of EMG electrodes, Neuroline 720 from Ambu, were used. Their placements are shown in Figure 2(b), for detecting muscle activities of biceps brachi, triceps, pronator teres, and supinator, whereas, the reference electrode was placed at the wrist. Before the placement of the electrodes, the skin was shaved and cleaned with alcohol wipes. Conductive gel was also applied to acquire good quality of signals.
Data collection
Figure 3 shows the hardware setup to collect FMG and sEMG data. The FMG was recorded through custom developed non-inverting operational amplifier and sEMG was recorded through commercially available AnEMG12 amplifier from OT Bioelettronica. Both systems were interfaced to Arduino Due. The data from Arduino was further transmitted to a laptop through serial communication, where MATLAB based GUI was designed to record the data at the frequency of 700 Hz. The GUI was designed to display each motion type to be performed in a randomized order during training and testing sessions. Moreover, all subjects were instructed to complete each given motion in four seconds. It was understood that it is less probable that the subjects will exactly start and finish the motion in the given time. Therefore, the initial and last quarter second of the data were not included, only the middle three and a half seconds of data was used for training and testing.

Hardware setup to collect data with (a) FMG, and (b) sEMG.
Data was recorded for three consecutive days for each subject, the details are as follow
Day 1: Training dataset, Day 2: Training dataset, Day 3: Training dataset,
On each day a new set of electrodes were used and to maintain the consistent places, electrodes placement was marked each day. In the case of FMG, the FSR sensors were not replaced, however, the placement of the sensor bands were marked every day so that they could be placed at the same spot. Markers were also placed on the sensor band in order to achieve similar tightness.
Furthermore, for sEMG signals, a digital high pass filter of 30 Hz was applied to remove the DC offset. Whereas, FMG was passed through a low pass filter of 100 Hz to remove high-frequency noise. FMG data was also calibrated to zero for rest condition each day. The raw data collected for both methods, i.e. FMG and sEMG, is shown in Figure 4.
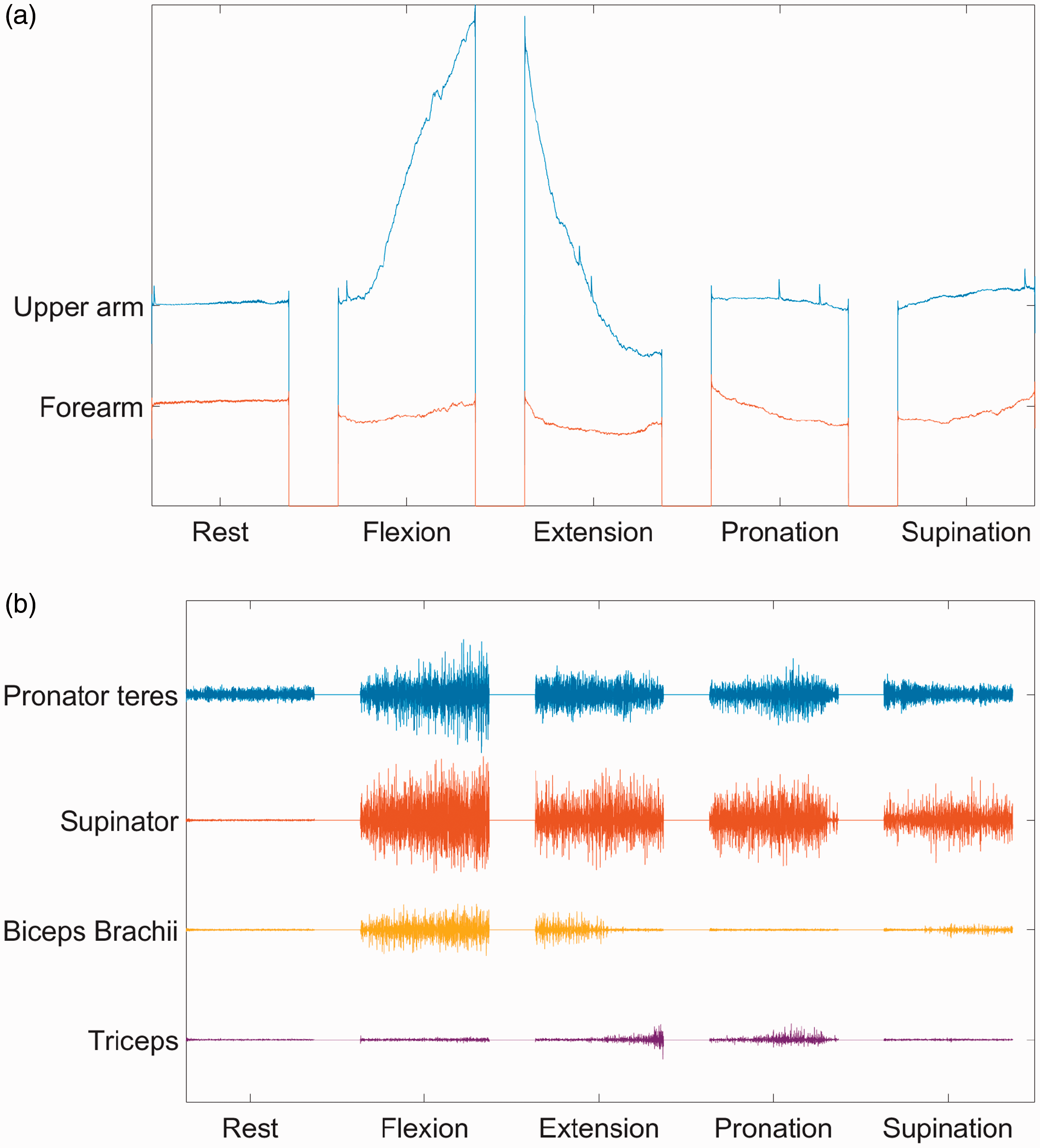
Raw data obtained with (a) FMG and (b) sEMG.
Signal processing and feature extraction
In further post-processing, five time-domain features were extracted from sEMG i.e. mean absolute value, waveform length, zero crossing, slope sign changes and wilson amplitude. Time domain features have been widely used for their classification performance and low computational complexity. 44 Moreover, these features have been reported in other classification studies41–43 as well.
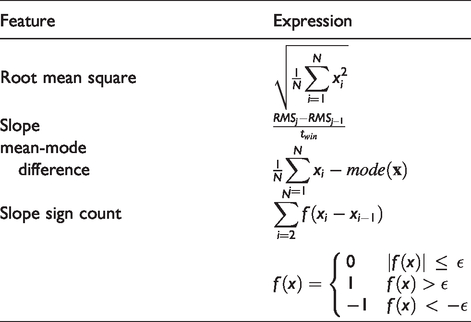
In the case of FMG, four time-domain features were extracted i.e. root mean square, slope, mean-mode difference and slope sign count, presented in Table 1. Within these features RMS is a generally used33,42 feature to obtain the average signal amplitude. Whereas, slope, mean-mode difference and slope sign count are used to compute the direction and change in signal amplitude w.r.t time.
Features extracted from FMG raw data.
Prior to feature extraction, FSR sensors data from upper arm sensor band was summed together and used as a single input. Similarly, FSRs data from forearm sensor band was also summed together. Furthermore, a window size of 150 ms with an overlapping window of 50 ms was used for feature extraction and Neural Network (NN) was implemented to perform the classification. In the NN setup number of hidden layers and neurons were selected according to the rules defined in Heaton. 45 Single hidden layer with 7 neurons and 10 neurons were used for training FMG and sEMG based classifiers, respectively. Maximum iteration limit in both cases was set to 10000.
Experiments
Five able-bodied male subjects took part in the experiments. All of them were healthy, right-handed and their ages were in the range of 27-35 years. Moreover, all of them were provided written informed consent prior to participation. Ethical approval to conduct these experiments was obtained from ethical committee, Region Nordjylland, Denmark.
Testing scenarios
The primary focus of this study was to investigate FMG and sEMG based NN classifiers for classifying forearm motions. The classifiers were tested on all three testing datasets ( Test A: In this test, the classifiers were tested after being trained only with Day 1 training dataset Test B: In this test, the classifiers were further evaluated by training them with multiple training datasets. The classifiers were first trained on training datasets
Furthermore, tests were also performed to compare the CA with different techniques, i.e. support vector machine
35
(SVM), linear discriminant analysis
46
(LDA), k-nearnest neighbor
46
(KNN) and random forest
47
(RF), using training datasets
Results
The results are displayed according to the tasks defined in the previous section.
Test A
For both FMG and sEMG motion detection methods, CA was calculated over three days of testing data with the classifier trained on Day 1. The results of CA w.r.t each day are displayed graphically in Figure 5. An average CA of 85.9 ± 8.64% was obtained for FMG with the testing dataset

Average CA for training the classifier with

Average CA obtained for individual subjects, (a) with FMG and (b) with sEMG.
The average CA over all three days was 84.9 ± 3.36% for FMG and 77.9 ± 11.06% for sEMG. If we look only at Day 1 performance, sEMG showed better results than FMG. However, it has to be noted that for the next two days the CA with sEMG is reduced by 25,6%. Kruskal-Wallis test also showed that the CA between days was significantly reduced (p = 0.046), which indicates that the data acquired was not repeatable. On the contrary, FMG accuracy of Day 1 testing was lower than sEMG, however, the average accuracy is only reduced by 5.5% in the next two days. There was also no significant difference observed between each day average accuracy (p = 0.403), which indicates that data acquired through FMG is comparatively more repeatable than sEMG.
Test B
The long-term performances of both FMG and sEMG were further analyzed by testing the datasets TS1: Training the classifiers using dataset TS2: Training the classifiers using datasets TS3: Training the classifiers using datasets
The results of CA with training scheme TS2 are shown in Figure 7(b). When comparing the results with TS1, it can be seen that the CA in the case of FMG was improved for Day 2 by 3.1% and Day 3 by 2.6%. In the case of sEMG, CA only improved for Day 2 by 2.2%. However, the change in CA for both methods, FMG (p-value = 0.917) and sEMG (p-value = 0.917), was not significant.

Day-to-Day CA with training schemes (a) TS1, (b) TS2, and (c) TS3.
The results of CA with training scheme TS3 are shown in Figure 7(c). The results show that the CA obtained through FMG only improved for Day 3 by 1.4% when compared with the results obtained through TS2. In comparison to TS1, the CA was increased for Day 2 by 2.2% and Day 3 by 4%. However, the Kruskal-Wallis test indicated that the change in CA occurred between all three training scenarios was not significant (p-value = 0.97). Whereas, in the case of sEMG, the CA was significantly improved. When compared with TS2 the CA was increased for all three days, Day 1, 2 and 3, by 2.2%, 3.1%, and 17.8%, respectively. Moreover, in comparison to TS1 the CA for Day 2 and Day 3 were increased by 5.3% and 16%, respectively. The increase in CA was also observed from the Kruskal-Wallis test. The p-value of 0.049 was obtained, which indicates the increase in CA was significant.
The average CA obtained for each training scheme is shown in Figure 8 and summarized in Table 2. It is noted that the repeatability in Table 2 represents the percentage of CA decrease from Day 1 to Day 3 w.r.t Day 1. In the case of FMG, the average CA slightly increases from TS1 to TS2 but decrease from TS2 to TS3. Whereas, in the case of sEMG, the CA slightly decreases from TS1 to TS2, but increased significantly from TS2 to TS3 by 7.7%. However, repeatability results showed a similar pattern for both methods. The difference in CA between Day 1 and Day 3 decreased from TS1 to TS3. Although both methods showed a similar pattern in repeatability, FMG has a better performance than sEMG in both aspects i.e. CA and repeatability.
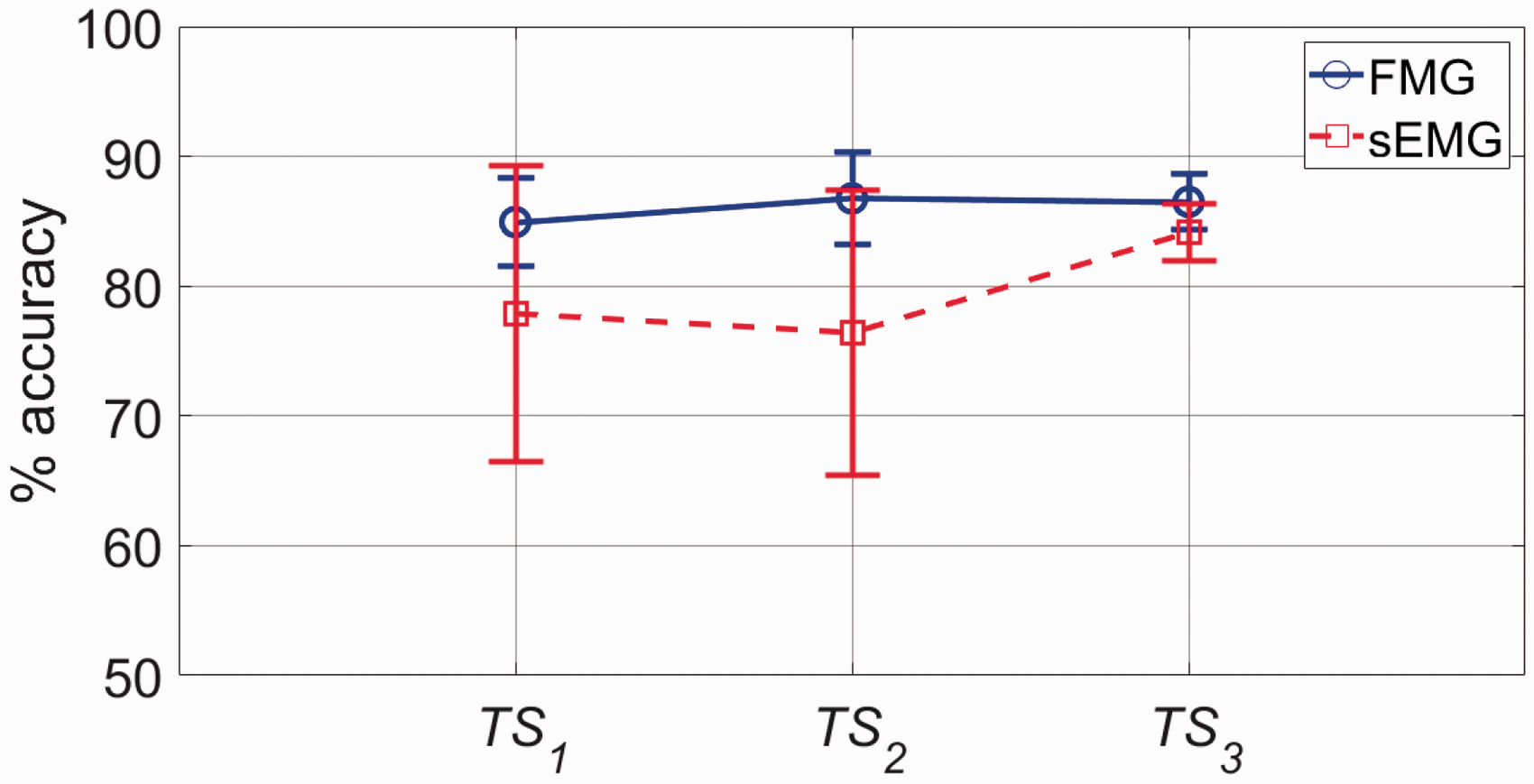
Average CA for three training schemes.
CA and repeatability achieved through FMG and sEMG.

Figure 9 shows the results for each individual subject. The CA results obtained with FMG are shown in Figure 9(a). It can be seen that a significant increase in CA was only observed for subject 4, which was 5.07%. However, in the case of sEMG (Figure 9(b)), CA was improved by 3.9%, 10.18%, 5.78% and 11.69% for subjects 1, 2, 3 and 5, respectively.

Within days average CA for each training scenario and each individual subject for, (a) FMG, (b) sEMG.
Classification techniques comparison
In this experiment performances of five different classification techniques were compared i.e. SVM, LDA, KNN, RF and NN. Results of this experiment are shown in Figure 10.

Results of different classification techniques, (a) FMG, (b) sEMG.
It can be seen that LDA has the lowest performance for both FMG and sEMG. Whereas, highest CA is achieved using NN approach. However, In case of FMG, Figure 10(a), the performances of NN and RF are comparable, accuracy obtained through RF being only 0.3% less than NN.
Discussion
This study was aimed to investigate the accuracy of classifying forearm motions using FMG and sEMG based classifiers. The study addresses the day-to-day performance of both methods. Results have shown that FMG (84.9 ± 3.38%) performed better than sEMG (77.9 ± 11.43%). Another noticeable result is that the FMG method is more stable than sEMG. Our results show that the CA with FMG method was nearly the same for all three days for the classifier trained on the first day. On the other hand, the CA obtained through sEMG was better on the first day, but significantly decreased for the rest of the two days, when the classifier was only trained on the first day.
Our study also showed that retraining the classifier each day didn’t cause significant improvement in CA for FMG. On the other hand, a significant increase in CA was observed for sEMG. The performances for both methods (FMG and sEMG) were comparable. FMG yielded the average CA of 86.5 ± 2.11% and sEMG yielded the CA of 84.1 ± 2.18%. It can be noticed that only 1.6% increase in CA is found for FMG, which again implies that the data recorded through FMG was consistent. Therefore, the inclusion of additional training dataset in retraining the classifier didn’t improve the average accuracy for FMG as much as it improved in case of sEMG, which is 7.63%.
The results obtained in this study comply with the studies reported in literature,40,41 where it was reported that FMG performed better then sEMG for classifying hand gestures and estimating fingers force. It is noted that those studies were carried out for one day only, while day-to-day performances were not considered.
In this study, four FMG features were used to predict the movements. Through experiments it was observed that slope had the highest contribution in the CA, whereas mean-mode difference had the lowest contribution. With the results obtained, CA can be further increased by applying weight to the existing features or introducing more features in the classifier. In future studies, each sensor output will be considered separately. On the other hand, only two repetitions were used to retrain the classifiers. More repetitions can also affect the CA of both methods. Moreover, the performance comparison in this work was conducted on healthy young subjects, so the results are not generally applicable to motion detection of humans of all ages and physical conditions.
Conclusions
In this study, the performances of FMG and sEMG were investigated for classifying forearm flexion, extension, pronation, supination and rest state. CA and repeatability of these methods were analyzed for motion identification testing over a period of three days under different training schemes.
The results show that the accuracy obtained through FMG was less affected by the time difference between training and testing day. The results indicate that the performance was consistent and repeatable. However, CA obtained through sEMG was significantly affected by the time difference. The decrease in CA was gradual and significant. The improvement in CA and repeatability was observed when the classifiers were retrained each day. Whereas, CA with FMG didn’t show significant improvement using retraining approach, which indicates that the data obtained through FMG is comparatively more repeatable.
Our testing results on CA and repeatability indicate that FMG is more suited than sEMG for assistive exoskeleton applications, which are designed for ADL activities. As using exoskeletons on a daily basis user might take the exoskeleton on and off several times, a requirement of retraining makes it less acceptable to end-user. Whereas, sEMG requires retraining to achieve repeatable performance and therefore it is more suited for rehabilitation applications, where the primary focus is on acquiring muscle activity for monitoring and analysis purpose.
Footnotes
Acknowledgements
The authors would like to thank participants for the contribution of time to this study.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by AAL Programme’s funding bodies for project AXO-SUIT (http://www.axo-suit.eu/) and Innovation Fund Denmark for project EXO-AIDER (![]() ).
).
Guarantor
MR.
Contributorship
MR and SB defined and developed this research work. MR and AW prepared initial protocol draft, collected data and performed analysis. EN and SB were involved in getting ethical approval and protocol finalization. MR and AW wrote the first draft of the manuscript. All authors reviewed the manuscript and approved the final version.
Research ethics and participants consent
Ethical approval to conduct this study was obtained from ethical committee, Region Nordjylland, Denmark. Also, all participants provided written informed consent prior to experiments.