
Abstract
It has been a challenge to simulate flexible flapping wings or other three-dimensional problems involving strong fluid–structure interactions. Solving a unified fluid–solid system in a monolithic manner improves both numerical stability and efficiency. The current algorithm considered a three-dimensional extension of an earlier work which formulated two-dimensional fluid–structure interaction monolithically under a unified framework for both fluids and solids. As the approach is extended from a two-dimensional to a three-dimensional configuration, a cell division technique and the associated projection process become necessary and are illustrated here. Two benchmark cases, a floppy viscoelastic particle in shear flow and a flow passing a rigid sphere, are simulated for validation. Finally, the three-dimensional monolithic algorithm is applied to study a micro-air vehicle with flexible flapping wings in a forward flight at different angles of attack. The simulation shows the impact from the angle of attack on wing deformation, wake vortex structures, and the overall aerodynamic performance.
Introduction
Fluid–structure interaction (FSI) is inevitable in the study of dynamic behaviors in nature and engineering applications. Due to its complexity involving both fluid flows and flexible structures, FSI is usually studied in a progressive manner: first one-way coupling, then two-way coupling but with rigid-body motion, and eventually two-way coupling with visco-elastic solid structures. One example is the century-long study of (flexible) flapping-wing flight mechanism involving strong FSI between air and wings. The basic mechanism of the thrust generation from flapping wings is described independently by Knoller 1 and Betz 2 more than a century ago. The difference in thrust generation from pure plunging and pitching was first studied by Garrick. 3 More recently, there were studies4–7 considering “onsideri impact from moving structures to fluid flow. With the need to understand the impact of flexibility on flapping-wing aerodynamics in modern technologies,8–16 it becomes crucial to explore the physics of two-way fully coupled FSI problems computationally and experimentally.
Numerical simulation of a fully coupled FSI problem typically includes two separate sets of equations, algorithms and modularized computer codes, for fluid and solid, respectively. The coupling of the two parts is achieved by an iterative process of exchanging information at the fluid–solid interface.17–20 During the process, other algorithms may be involved for the projection and mapping between different coordinate systems for the computation of fluid flows and solid structures. Despite the convenience from separating the code development on fluid and solid solvers, this common practice faces challenges in computational efficiency and stability. The projection and exchange at the fluid–solid interface may potentially reduce the overall efficiency and may not reach the convergence with an iterative process at each time step. Physically, the response in fluids and solids are largely different in time scale, and the smaller time scale may limit the overall time to reach the convergence at the fluid–solid interface and therefore reduce the computational efficiency. An ideal remedy would be to have a unified description and a monolithic algorithm to solve the entire FSI problem simultaneously without iterations.
The presented monolithic approach is based on a unified fluid–solid equation in an Eulerian configuration for a combined domain of fluids, solids, and the interfaces.10,21,22 The immersed boundary method23–32 was implemented relying on surface-force and body-force terms to represent the fluid–structure boundaries and the structural dynamics for viscoelastic bodies with one simple discretization. On the other hand, to assure the accuracy in the computation of structural dynamics, a Lagrangian mesh is kept to track the location of the structure. In the current work, the elastic stress in solids, at the expense of a projection process between fluid and solid,10,21 gets more sophisticated for three-dimensional systems. When the situation requires a prescribed motion for certain solid structures (e.g. control gear in mechanical system, or skeleton system in a flying bird),10,31 the aforementioned formulation allows additional terms to define motion trajectory in a way similar to traditional immersed boundary method.26,30
The rest of the paper introduces the basic idea and derivation of the unified governing equations for fluids and solids. Followed by the governing equations, a detailed description of various algorithms is presented to deal with numerical challenges in the implementation of the unified fluid–solid equation. The focus is to explain the theoretical derivation and computational treatment of elastic stress terms during the cell division and the projection between the Eulerian and Lagrangian coordinates. Two benchmark cases were demonstrated to validate the algorithm in three dimensions and the viscoelastic treatment in two dimensions. Finally, the current monolithic approach for FSI systems was applied to simulate the flow surrounding the flexible flapping wings of a micro-air vehicle (MAV), which involves all the fundamental features provided by the current algorithm: three-dimensional system, passive viscoelastic structure (i.e. the wing), actively prescribed motion (i.e. the control gear for flapping mechanism). In this study of a flapping-wing forward flight, different angles of attack are considered for the impact on wing deformation, flow structures, and the overall aerodynamic performance. A concise discussion concludes this work.
Governing equations
The whole region is divided into two parts: the fluid region Ω
f
and the solid region Ω
s
. The solid region Ω
s
is further divided into two parts, the prescribed region Ω
sp
and the free passive region Ω
sf
, as shown in Figure 1. In other words,

Sketch of different regions in a unified fluid–solid domain: the fluid region Ω f , the solid region Ω sf with free passive motion, and the solid region Ω sp with actively prescribed motion.
Eulerian description for fluids
For an incompressible fluid, the non-dimensional continuity and momentum equations must be satisfied



For a Newtonian fluid, the dissipative viscous stress tensor can be derived by employing Onsagerng reciprocal relations and Coleman–Noll procedure in Clausius–Duhem inequality as
33

By substituting equations (3) and (4) into equation (2), the celebrated Navier–Stokes equations for incompressible viscous flows can be found


Eulerian description for solids
Motions of solid structures are usually described in a Lagrangian coordinate, and it is uncommon that the motions are formulated in an Eulerian configuration. The balance law of linear momentum for solids in reference configuration is34,35

For a viscoelastic solid, the constitutive equation can be found as a function of


The obedience of objectivity allows the Cauchy stress tensor for solid to be expanded with the complete and irreducible set of generators in isotropic function representation theorem.33,34,36,37 With the approximation of incompressiblity for solids, i.e.

Finally, by employing the material derivative and substituting equation (10) into equation (7), we have

Unified framework for solids and fluids
By comparing equations (6) and (11) and assuming the same density and viscosity in both solids and fluids (i.e.



The external force at the fluid–solid interface becomes an internal force and is removed from the unified formulation. Although the assumption of the same density provides convenience in the current work, it is possible to remove this constraint for more general applications. 13
Implementation of prescribed motion
The unified framework allows to solve the fluid flows and the solid structure simultaneously. Using a rubber ball in a driven cavity flow as an example, 21 part of the computation domain is labeled as solid domain for the rubber ball, and the rest of the computational domain is labeled as fluid. By solving equation (12), motions of both the rubber ball and the surrounding fluid flow can be achieved. It should be noticed that the rubber ball only deforms under the influence of the surrounding fluid flow. In other words, the trajectories of each solid points are passively controlled by the surrounding flow. However, in some applications (e.g. the motion of an actively flapping wing), an actively moving trajectory for the solid, i.e. Ω sp , is required. The Lagrangian cells used for actively deformed solids are tagged as control cells. The moving gaits of such control cells are defined in a way similar to the commonly used direct-forcing approach. 24
In the direct-forcing approach, an additional force term is added for the prescribed motion. To show the basic idea of a direct-force approach, we may lump all the right-hand side terms of equation (12) into

Then a body force term being confined in the prescribed region Ω
sp

The unified fluid–solid dynamical equation
Based on the unified governing equations for FSI and the trajectory control with a direct-forcing approach, the final momentum equations for a combined fluid–solid system and with active control mechanism are



Numerical implementation
Solving momentum equation
The numerical implementation of equation (17) for FSI is straightforward by adopting the conventional simulation methods for incompressible Navier–Stokes equations (e.g. projection method
40
). In this study, all the computation in an Eulerian framework is based on a staggered Cartesian mesh, where the velocity components u, v, and w are evaluated at the surface center of Cartesian cells and the pressure p is evaluated at the cell center. A third-order Runge–Kutta/Crank–Nicolson scheme21,41 was chosen for time advancement. The non-temporal term for fluids

In order to account for the prescribed motions, the velocity is then projected back to the Cartesian mesh points for the calculation in an Eulerian framework. As a result, the corresponding Cartesian mesh points associated with each Lagrangian points need to be located. When uniform mesh is used, the surrounding Cartesian points of each Lagrangian point
Elastic stress calculation and projection
Although the unified formulation is used for both solid structures and fluid flows, a Lagrangian mesh is required to keep the sharp interface between fluids and solids. Therefore, there are two steps for the numerical implementation of the elastic term for solids,
Stress calculation
Force projection
The force project method proposed by Zhao et al.21,41 is used to distribute the smoothed solid stress from the Lagrangian frame back to the background Eulerian mesh with the trilinear interpolation as

Gauss quadrature for force projection
The solid stress field at an arbitrary point (x, y, z) can be approximated by

Then Gauss quadrature rule was used to calculate the integration

For a two-dimensional integration, M2 integration points are needed to obtain the exact integration of polynomial with a degree of


Demonstration of using vectors on edges to define the normal vector of an arbitrary surface in a tetrahedron.
Cell division technique
The original work of Zhao et al.21,41 laid the foundation to maintain the accuracy in the projection of elastic stresses from the Lagrangian mesh to the background Eulerian mesh. In particular, they tracked the intersection points of two meshes in a two-dimensional domain and used Gauss quadrature for an accurate integration of stresses in the projection to the Cartesian mesh of an Eulerian framework. In an extension from the two-dimensional algorithm to the current three-dimensional configuration, there are obvious challenges in the formulations including more complicated Gauss quadrature rules as explained earlier. However, the most challenging (and complicated) modification comes from the change of both cells, the Lagrangian mesh cell for solids and the Eulerian mesh cell for the unified fluid–solid equation, from two-dimensional geometries to three-dimensional geometries. The entire process to deal with the intersection of three-dimensional cells in the projection of stresses including special treatment for reducing numerical errors, dubbed as cell division technique, is described below.
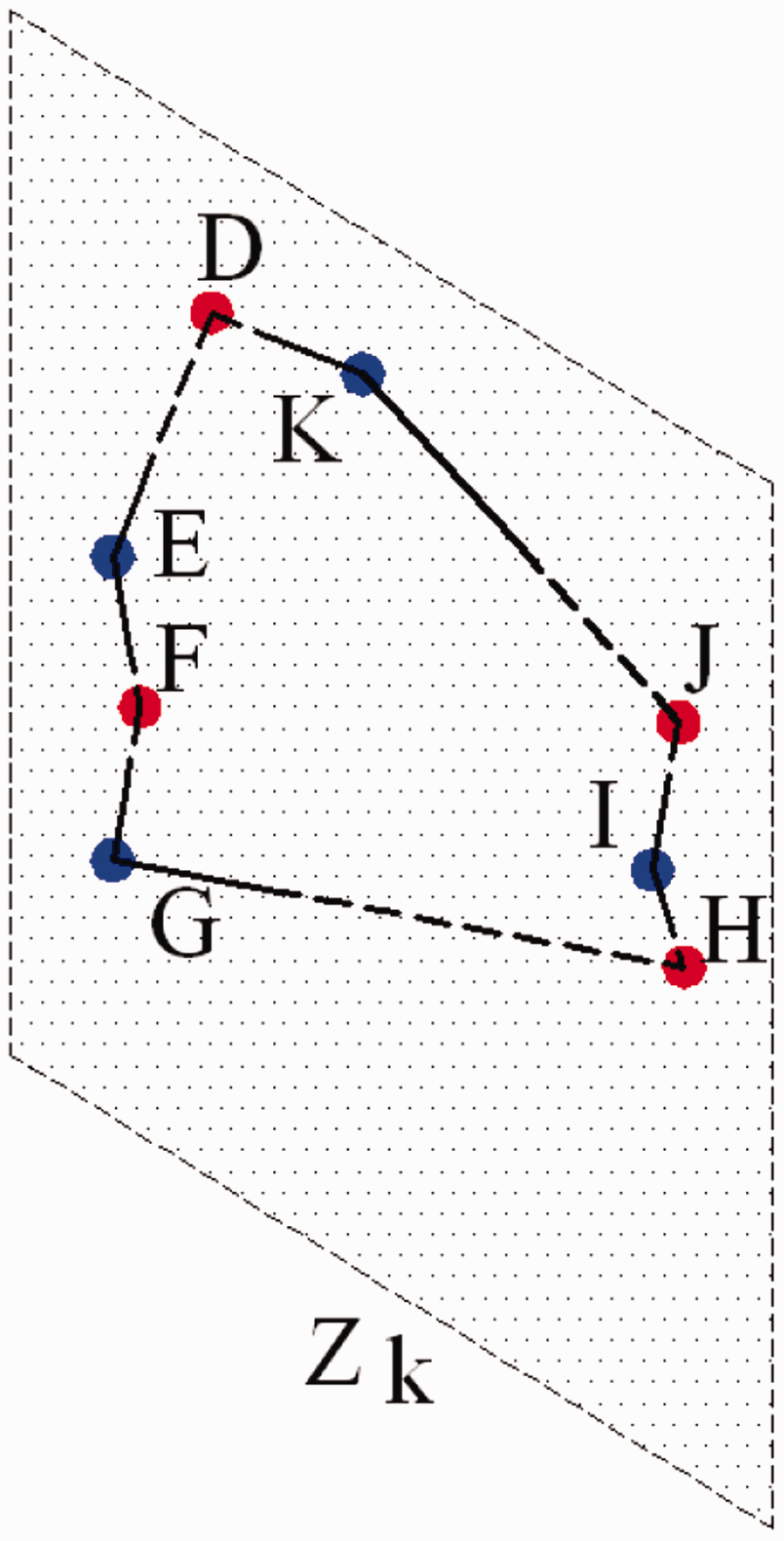
The cell division starts as the Lagrangian cells being cut into sub-elements by the two-dimensional faces of the Cartesian (Eulerian) cells. The surfaces of new sub-elements belong to either the original surfaces of the Lagrangian cells or the Cartesian surfaces cutting into. The boundaries of sub-surfaces are defined by the intersection points of all cut surfaces which are computed and saved whenever there is a relative motion of the two meshes. Figure 3 demonstrates a case of a tetrahedron being divided into three sub-elements by two background Cartesian surfaces.

Cell division of a tetrahedron cell by two background Cartesian surfaces.
The basic rule for cell division to generate sub-elements is simple and it adds almost negligible computational overhead. However, some extreme cases may appear in the implementation and require special treatments. Figure 4 shows an example of such special cases. The tetrahedron

Demonstration of a tetrahedron
A possible scenario for the sub-surface
Benchmark studies
Two benchmark cases were studied for the validation of different aspects in the development of the current algorithm: (1) a two-dimensional viscoelastic particle in shear flow is simulated to validate the treatment of solid in the unified formulation and its interaction with surrounding fluids; (2) the flow passing a rigid sphere, as a classical flow dynamics problem with embedded solid structure, to further validate the extension of the algorithm from two-dimensional to three-dimensional.
Viscoelastic particle in shear flow
To validate the accuracy of treating elastic stresses in the unified Eulerian framework and the associated fluid–solid interaction in the same framework, the algorithm is applied for the simulation of a two-dimensional floppy viscoelastic particle in shear flow (Figure 6). It is noted that the immersed boundary approach used here is fast and different from the algorithm in the original study of the same problem.44,45

Sketch of a viscoelastic particle in a shear flow.
Typically, the inertia term is neglected for creeping-flow problems where the Reynolds number,

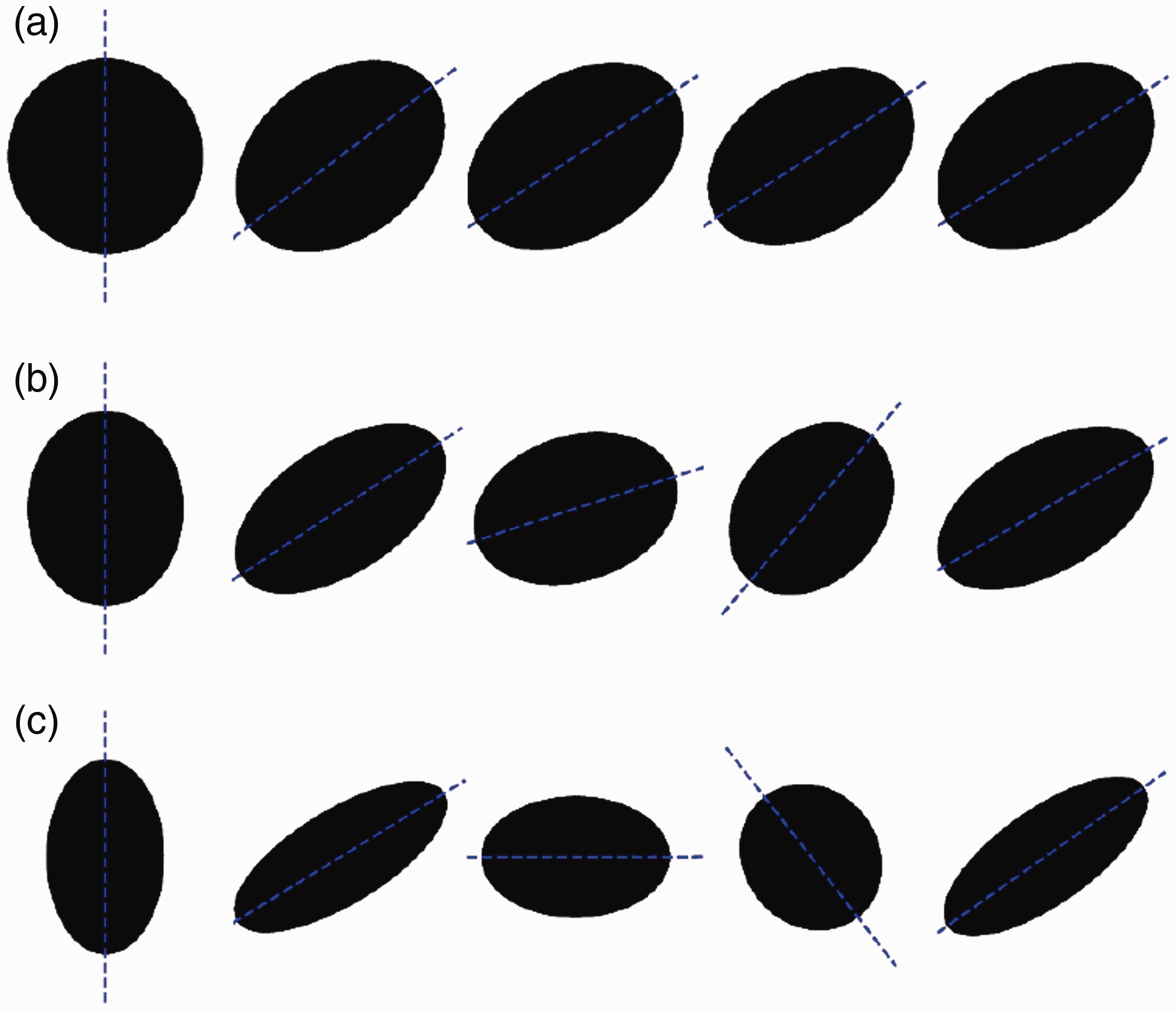
Different types of motion of viscoelastic particle in a shear flow: (a) tank-treading, (b) trembling, (c) tumbling.
The current immersed boundary approach was able to simulate all different types of motions. The computational domain is

Regions of trembling motion and tumbling motion for a two-dimensional viscoelastic particle in a shear flow: a comparison of our results to the results from literature 45 using a different approach.
Incompressible flow passing a rigid sphere
An incompressible flow passing a stationary rigid sphere, as a classical benchmark case, has been investigated theoretically, numerically,46,47 and experimentally.48,49 This case was used to further validate the current approach of using a unified fluid–solid equation in a three-dimensional configuration which was not included in the first benchmark case. There are two reasons to consider only a rigid sphere in this validation: one is that the rigid sphere case is well studied and suitable for benchmark purpose, and the other is that the elastic formulation has already been validated in the first benchmark but the direct-forcing term (for rigid body and control gears) has not been validated yet.
In this study, the non-dimensional diameter of the sphere is D = 1, and the free stream velocity is

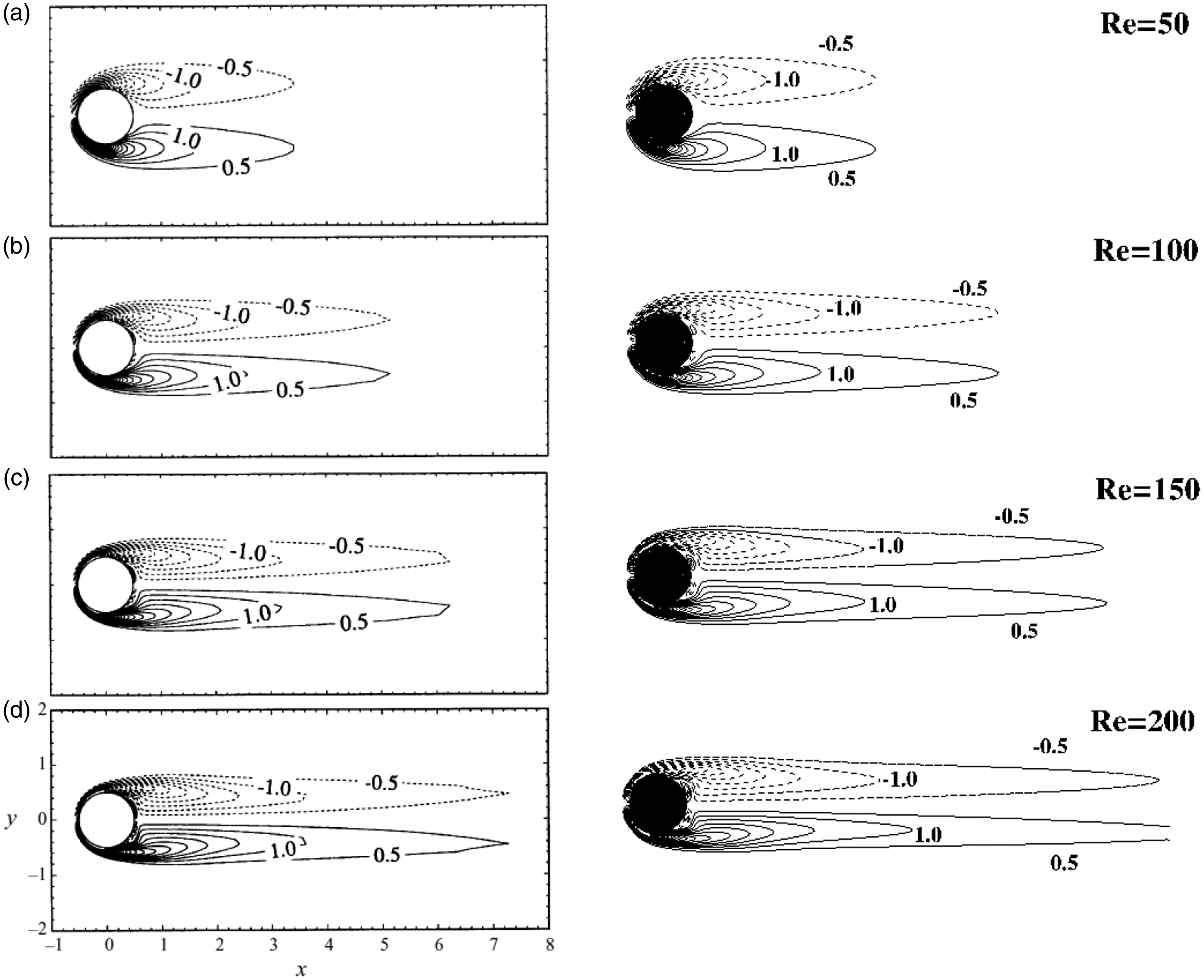
Comparison of the vorticity contours (ωz) showing different wake patterns for the flow passing a sphere: (left) the numerical simulation by Johnson and Patel 47 and (right) the current simulation using an immersed boundary approach with a unified formulation.

Comparison of the flow structure of hairpin vortex from a flow passing a sphere at Re = 300: (a) Johnson and Patel 47 and (b) the current simulation.

Comparison of the drag coefficient for a flow past a sphere with different Reynolds numbers.
Application on the simulation of a MAV with flexible wings
Established by the aforementioned benchmark cases, the current approach is ready for the simulation to study the aerodynamics of a MAV with flexible flapping wings, where the challenges of three-dimensionality, elastic structures, and direct-forcing controls all exist.
The computation domain is
The wing model used in this simulation is based on the measurements from a wing of a toy MAV (by Interactive Toy Concepts Ltd). Figure 12 compares the original toy model to the numerical model with flapping motion. The lengths in the figure are non-dimensionalized by the length of the wingth leading edge. The green part of the numerical model moves passively and described by the elastic terms in the unified formulation, and the blue part of the model is prescribed by the direct-forcing terms either to control the flapping motion (the blue “lueonngor line) or to fix the wing structure to the body (the blue patch).

Demonstration and comparison: (top) a toy MAV and its flexible wing; (bottom) the numerical model and the basic dynamics. In the numerical model, the green part is flexible with passive motion and the blue part is rigid with prescribed motion.
The flapping of wing is driven by the rotation of the blue “skeleton” line described by the flapping angle θ (marked in Figure 12) and the angular velocity


As shown in Figure 13, the wing deformation of the case with angle of attack

Wing deformations when flapping with the angle of attack
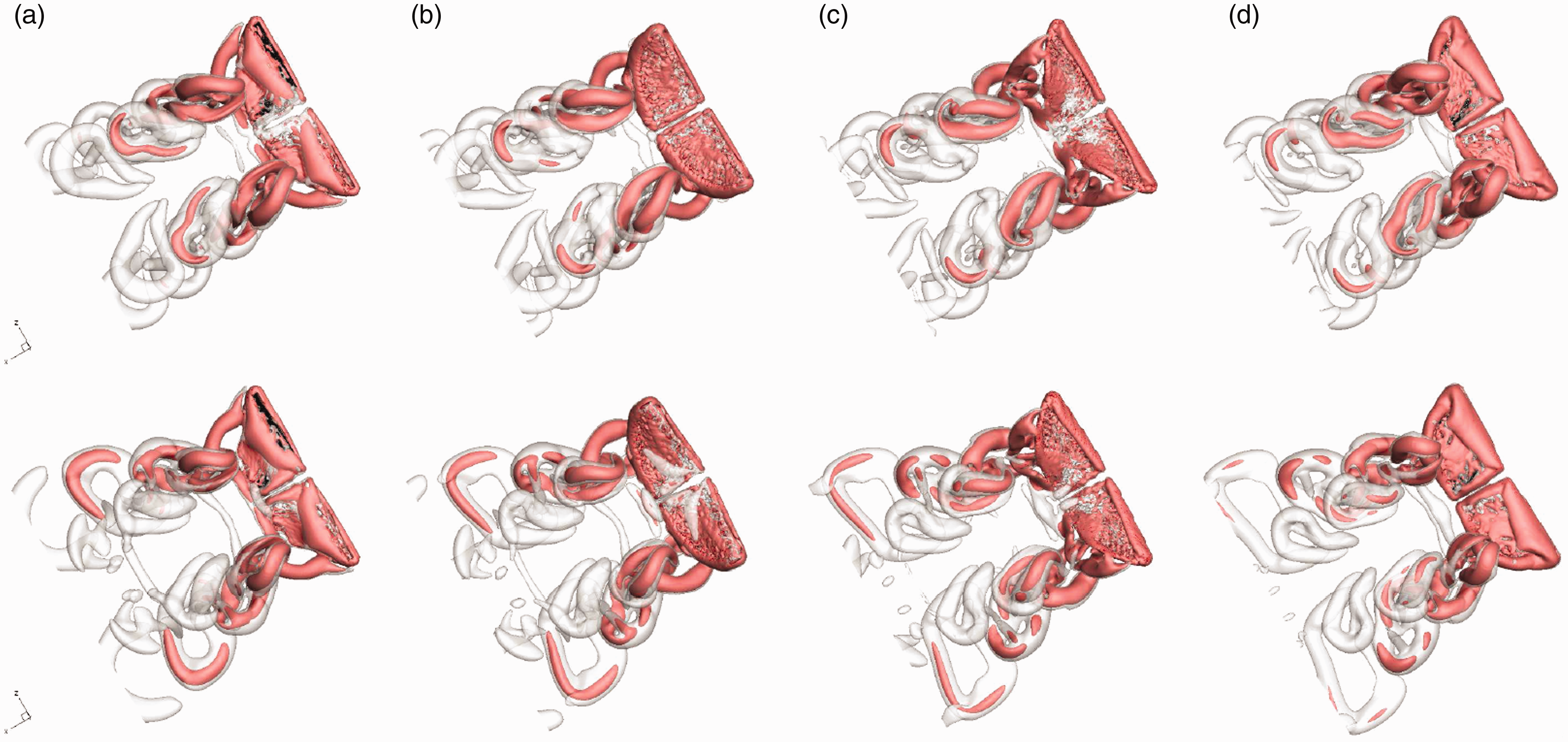
Vortex structures of the wake flows when the wing flapping with the angle of attack
Figure 15 compares the overall aerodynamic performance of these two cases. It is not surprising to see the non-dimensional lift increases with the increase of angle of attack, with the averaged non-dimensional lift

Time history of the (a) lift and (b) drag for the flexible wing flapping at different angle of attack
Conclusions
In this study, a strongly coupled three-dimensional algorithm for FSI is constructed through a monolithic immersed boundary method. The motions of flows and structures as well as its interaction are simulated under a unified Eulerian framework, while the location of structure is tracked accurately by a Lagrangian mesh. The interpretation and projection between the Eulerian and Lagrangian frameworks are calculated through a cell division technique and Gauss quadrature. It should be noted that the interpretation and projection between the Lagrangian and Eulerian frameworks are meant for the evaluation of solid elastic stress, and the time advancement for both fluid and solid is performed in an Eulerian framework (i.e. the unified governing equation). It is intrinsically a monolithic immersed boundary algorithm for fluid–solid interactions in an Eulerian description.
The monolithic FSI algorithm was validated by comparing the simulation results with other numerical simulations and experimental measurements in literature using two classical cases to cover two- and three-dimensional configurations and rigid and flexible structures: the flow passing a three-dimensional rigid stationary sphere and a two-dimensional floppy viscoelastic particle in a shear flow. The qualitative and quantitative comparisons agree well with the existing literature in both cases.
The monolithic FSI algorithm was then used to study three-dimensional flexible flapping wings with different kinematics and parameters in a forward flight. The simulations at an angle of attack
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: MW and TY gratefully appreciate the support by the Army Research Laboratory through Army High Performance Computing Research Center (AHPCRC) and through Micro Autonomous Systems and Technology (MAST) Collaborative Technology Alliance (CTA) under grant number W911NF-08-2-0004. JC would like to acknowledge that this material is based upon work partially supported by the Air Force Office of Scientific Research under award number FA9550-17-1-0154.