
Abstract
The demand for micro-air vehicles is increasing as well as their potential missions. Whether for discretion in military operations or noise pollution in civilian use, the improvement of aerodynamic and acoustic performance of micro-air vehicles propeller is a goal to achieve. Micro- and nano-air vehicles operate at Reynolds numbers ranging from 103 to 105. In these conditions, the aerodynamic performance of conventional fixed and rotary wings concepts drastically decreases due to the increased importance of flow viscous forces that tend to increase drag and promote flow separation, which leads to reduced efficiency and reduced maximum achievable lift. Reduced efficiency and lift result in low endurance and limited payloads. The numerical simulation is a potential solution to better understand such low Reynolds number flows and to increase the micro-air vehicles’ performance. In this paper, it is proposed to review some challenges related to micro-air vehicles by using a Lattice-Boltzmann method. The method is first briefly presented, to point out its strengths and weaknesses. Lattice-Boltzmann method is then applied to three different applications: a DNS of a single blade rotor, a large eddy simulation of a rotor operating in-ground effect and a large eddy simulation of a rotor optimised for acoustic performance. A comparison with reference data (Reynolds Averaged Navier-Stokes, DNS or experimental data) is systematically done to assess the accuracy of lattice-Boltzmann method-based predictions. The analysis of results demonstrates that lattice-Boltzmann method has a good potential to predict the mean aerodynamic performance (torque and thrust) if the grid resolution is chosen adequately (which is not always possible due to limited computational resources). A study of the turbulent flow is conducted for each application in order to highlight some of the physical flow phenomena that take place in such rotors. Different designs are also investigated, showing that potential improvements are still possible in terms of aerodynamic and aero-acoustic performance of low-Reynolds rotors.
Introduction
Numerical simulation, supported by high-performance computing (HPC) and experimental validation, led to major breakthroughs in our knowledge of complex physical phenomena and our capability to design innovative technologies. To go beyond the current state of the art, there is still a need to improve our aptitude to deal with complex flow physics, including aerodynamics, aero-acoustics or fluid/structure interactions. Such capabilities are mandatory to address ambitious targets, such as earth exploration but also the investigations beyond the limit of our planet. Together with the advent of micro-technologies, micro-air vehicles (MAVs) recently appeared as a relevant solution for missions of observation and surveillance. MAVs with enhanced endurance and ability to operate in constrained environments would considerably decrease surveillance costs while preserving safety of the operators in many civilian and military applications. They can also be used in an environment where the presence of humans is not yet possible. However, because of their small dimensions and the intrinsically low Reynolds numbers at which they operate, as well as the difficulty to optimise aerodynamic performance for both forward and hovering flight, current MAVs exhibit relatively low endurance (typically between 15 and 25 min in hover).
Low-to-moderate Reynolds number flows, typical of MAVs (
To illustrate the advantages and drawbacks of LBM, three applications have been selected in line with MAV challenges: a Direct Numerical Simulation (DNS) of a single blade rotor at low Reynolds number, a LES of a rotor operating in-ground effect and a LES of a rotor optimised for acoustic performance.
Description of the LBM
The LBM considers the discrete Boltzmann equation, a statistical equation for the kinetics of gas molecules, instead of solving directly the Navier-Stokes equations. The primitive variables of the LBM represent the statistical particle probability distribution function, to which the usual macroscopic variables, such as pressure and velocity, relate as velocity moments. In that regard, the particle distribution function is a continuous quantity (and not on a discrete particle approach). Beyond its computational performance, the main advantage of LBM is that the method is stable without artificial dissipation, which makes the method equivalent to solve the Navier-Stokes equations with a high-order numerical scheme. Its drawback is that it requires the use of Cartesian grids, which dramatically increase the number of grid points necessary to compute the flow close to walls. As detailed in Lallemand and Luo
3
and D’Humieres et al.,
4
the governing equations of LBM consider the probability

The collision operator is represented by a single relaxation time model, and a regularisation technique is applied to increase the stability and accuracy of the method.5,6 The regularisation step can be seen as an explicit filtering step (that is applied at each time step). Depending on the target in terms of Reynolds number, the turbulence can be fully simulated (DNS) (e.g. for the application to the single blade rotor at Reynolds number 103) or only the largest scale can be simulated while the smallest one are filtered (LES). 7 Due to the filtering provided by the regularisation step, the use of subgrid scale model is not mandatory (however, SGS models as the Smagorinsky model are available). The LBM equations are solved using the open source software Palabos (www.Palabos.org), developed by the University of Geneva.
The boundary conditions on the external faces of the computational domain are of Neumann type with zero velocity and pressure gradients. With this set of boundary conditions, the flow inside the computational box is fully driven by the rotor, and hence it helps to reduce the time needed to converge the flow inside the computational box. Sponge layers are imposed on each face to limit spurious reflections of acoustic waves, as proposed in Bodoni. 8 Such sponge layers rely on a progressive increase of the flow viscosity in order to damp the pressure and velocity fluctuations close to the boundary conditions. The movement of rotating blades is represented in the computational grid through an immersed boundary approach. 9 A wall model can be used to improve the description of the boundary layers. 10 However, due to the low number of grid points generally used in the boundary layer (less than 10 for the applications reported in this paper), the numerical predictions close to the wall should be considered with caution.
Single-bladed rotor at low-Reynolds number
The first application deals with the development of bio-inspired nano-flying robots. At very small scales, the observation of nature suggests that flapping wings may be a relevant solution to perform both hovering and forward flight with enhanced manoeuvrability. Although there is no compelling evidence that flapping wings are more aerodynamically efficient (or alternatively more aeroacoustically efficient) than other hovering capable concepts, in particular rotating wings, flapping wings have gained considerable attention due to the unique flow features upon which it relies. These include the development of a large-scale leading edge vortex (LEV), wing–wake interactions and other unconventional mechanisms such as clap-and-fling, depending on the precise kinematics of the flapping wing (see Shyy et al., 11 for a review). Among these mechanisms, the development of an intense conical LEV has proven to be the predominant mechanism at play for the generation of strong aerodynamic forces. The dynamics of the LEV can be investigated by looking at a single stroke of the whole flapping cycle. Note that a flapping cycle can essentially be decomposed into two revolving phases – namely the downstroke and upstroke phases – and two rotating phases – namely the pronation and supination phases. In this section, a direct numerical simulation of the flow is performed past a single stroke of the flapping cycle, which is here modelled by a wing revolving at constant speed about its root.
The main characteristics of the blade are summarised in Table 1. The wing has a rectangular planform with an aspect ratio of 4. It revolves at constant speed (impulsively started) about its root through 180°. The blade angle is set to 45°. The Reynolds number based on the revolving speed and the wing chord at the tip is 103. Figure 1 shows the instantaneous lift coefficient CL as a function of the revolving angle


Main parameters of the single blade rotor.

Results are compared with those reported in Mengaldo et al.
12
(DNS with an immersed boundary Lattice Green Function Method14,15) and Jardin and David
13
(DNS obtained with the commercial STAR-CCM+ software). It is shown that the results obtained from the present DNS–LBM approach match those obtained with other well-validated methods within reasonable accuracy (less than 3%). Three grids have been designed with resolution
Present results show that the revolving wing produces high levels of lift (considering the Reynolds number at which it operates) immediately after the impulsive start. In addition, lift remains at high levels during the whole revolving motion. This is fundamentally different to what is observed on a two-dimensional airfoil where the lift first reaches high levels but then drops together with the separation of the LEV. Figure 2 shows that sustained lift is correlated with the development of a stable LEV on the upper surface of the wing. The LEV develops during the initial stages of the revolving motion but rapidly reaches a stable state, i.e. it does not shed into the wake, hence generating high aerodynamic forces. Recent studies suggest that LEV stability is promoted by rotational effects16–18 and is therefore inherent to low aspect ratio of the revolving and rotating wings. Present results further show that the conical LEV bursts into small-scale structures at the wing tip, in agreement with experimental observations,19,20 highlighting the capability of the present DNS–LBM approach to track the onset of chaotic/turbulent flow. Such capability is further investigated in the next sections, at higher Reynolds numbers.

Iso-surface of Q criterion obtained from DNS–LBM simulations at different instants of time that describe half a rotation of the blade.
Two-bladed rotor in-ground effect
This application targets the prediction of the turbulent flow produced by the MAV rotor interacting with the ground,
21
at moderate Reynolds number,

Instantaneous flow field obtained with LES–LBM.
Main parameters of the two-bladed rotor in-ground interaction.

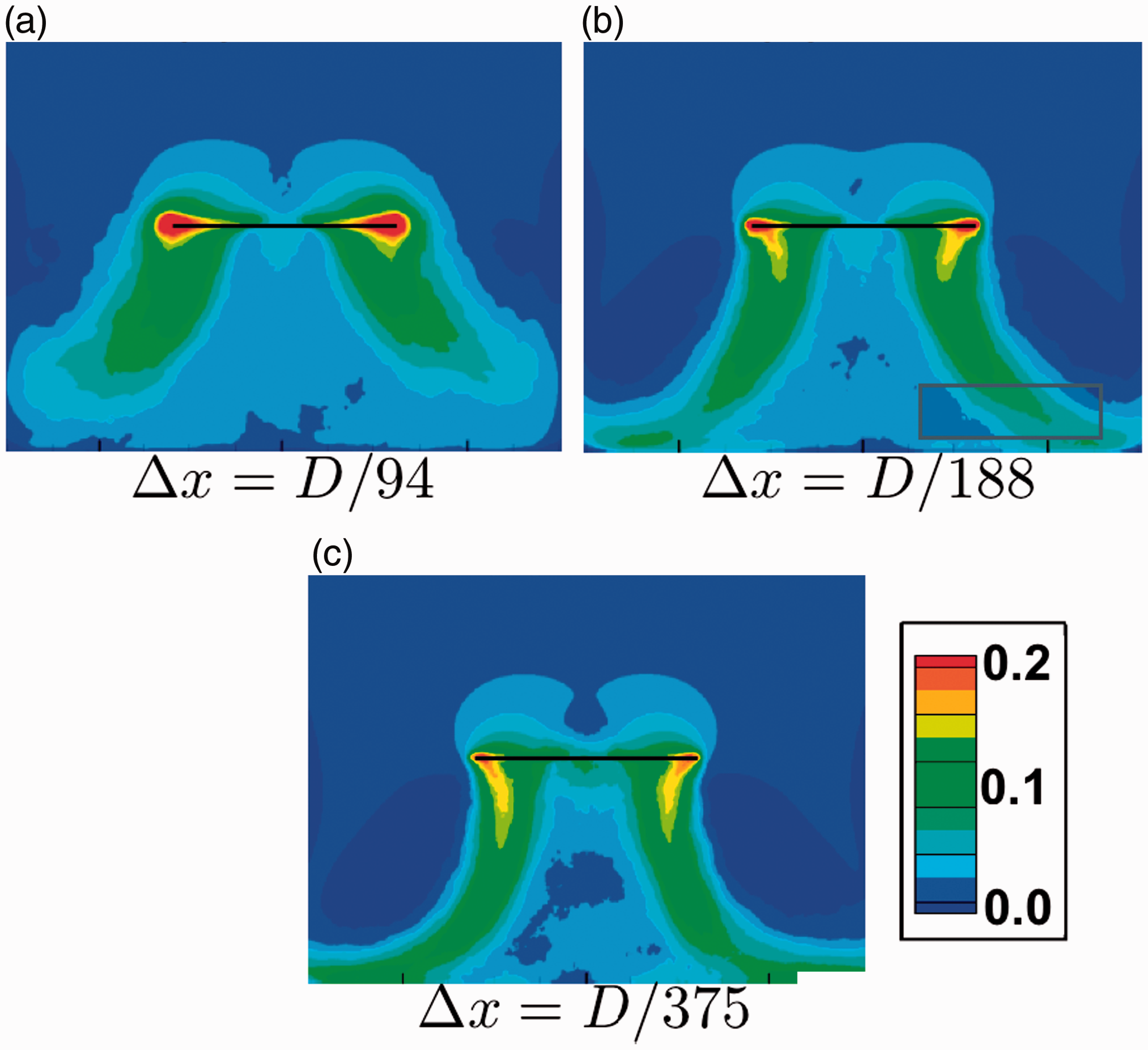
The main objective of this application is to validate the capability of LES–LBM to reproduce the flow generated by such in-ground effect, by comparing with the experimental data. To study the sensitivity of the solution to the grid, three meshes are used to perform the numerical simulations: for each grid, the resolution is increased by a factor of 2 compared to the previous grid. The resolutions compared to the rotor chord are, respectively,
A comparison of the time-averaged flow field obtained with the three grids is shown in Figure 4. Regarding the convergence of the flow close to the ground, the numerical simulation on grid 0 is not able to reproduce the interaction of the rotor wake with the ground. The main reason is due to the under-prediction of the rotor thrust (as reported in Gourdain et al. 21 ), which results in a lower velocity at the rotor outlet and a dissipation of the wake before it reaches the ground. Results on grids 1 and 2 are in reasonably good agreement, but discrepancies are observed in the rotor wake (where the peaks of velocity are under-estimated with grid 1) and close to the ground (where the velocity in the ground boundary layers is under-estimated with grid 1). This qualitative comparison shows that the obtention of grid-independent results remains a difficult task with pure Cartesian grids (the use of a hierarchical grid refinement, as considered for the third application, could help to overcome this limitation). For this reason, only the results on grid 2 are compared with the experimental data.
Time-averaged flow field coloured with normalised velocity
Experimental data from Jardin et al.
24
are compared with numerical predictions obtained on grid 2. Experimental measurements rely on the particle image velocimetry (PIV) technique. The PIV system consists of a 2 × 200 mJ DualPower Bernoulli laser to which two FlowSense EO 16M cameras are synchronised, using DantecStudio commercial software. The comparison is shown in Figure 5(a) (at two heights from the ground) and Figure 5(b) (at two radial locations). This comparison shows that LES–LBM correctly reproduces the time-averaged flow, in the vicinity of the rotor wake (

Comparison between experimental data and LES–LBM of time-averaged velocity signals: (a)
The interaction between the rotor wake and the ground drives the development of a ground boundary layer. The velocity magnitude is shown in Figure 5(b) at two locations,
To reduce the influence of the wake on the ground, a ducted rotor is compared with the initial free rotor. The immersed boundary approach is well suited to such an approach, as it allows continuing the numerical simulation by simply adding a shroud to the rotor, which avoid complex remeshing operations (which are often done manually).
Shrouded rotors usually generate more thrust than equivalent free rotors at a given rotation speed.
25
Indeed, the presence of a shroud contributes, at a given thrust, to reduce the velocity at the ground level since the rotation speed of the rotor can be reduced compared to unshrouded rotors. In this work, the rotational speed of the shrouded-rotor configuration can be reduced by 27%, with respect to the free rotor configuration, to provide similar total thrust. This reduction in rotation speed leads to a direct reduction of the flow velocity at the ground level. In addition, another effect of the shroud is to expand the rotor jet (through a diverging nozzle), which further contributes to decrease the downward velocity of the rotor wake. All this is conducive to weaker interactions between the rotor and the ground. The velocity flow field generated by ducted and free rotor configurations are compared at a constant thrust in Figure 6. At

Comparison between a ducted rotor and a free rotor at constant thrust, interacting with the ground: time-averaged velocity flow field

Velocity fluctuation
The conclusion of this second application is that LES–LBM successfully reproduces the flow generated by the rotor/ground interaction (which is validated by a comparison with experimental measurements). The use of immersed boundaries is also a very convenient way to study different geometries for the same configuration, avoiding the use of a costly remeshing step. However, the near wall flow has not yet been validated, due to unsufficient grid resolution and a lack of experimental data in the vicinity of the rotor.
Three-bladed rotor optimised for aero-acoustic performance
Whether for discretion in military operations or noise pollution in civilian use, noise reduction of MAV is a goal to achieve. Aeroacoustic research has long been focusing on full-scale rotorcrafts. At MAV scales, however, the quantification of the numerous sources of noise is not straightforward, as a consequence of the relatively low Reynolds number that ranges typically from 103 to 105. Reducing the noise generated aerodynamically in this domain then remains an open topic. This part of the work deals with the numerical simulations performed through unsteady Reynolds-Averaged Navier-Stokes (URANS) and LES–LBM to study the flow phenomena that are responsible for the noise generation of a rotor in hover.
URANS
LES–LBM predictions are compared in this section with those provided by an URANS approach. The three-dimensional URANS equations are solved using a finite volume approach, by means of Star-CCM+ commercial code. The computational domain is discretised using polyhedral cells. The boundary conditions upstream and downstream the rotor are implemented as pressure conditions, while the periphery of the domain is treated as a slip wall. The blades are modelled as non-slip surfaces. Both spatial and temporal discretisations are achieved using second-order schemes. Momentum and continuity equations are solved in an uncoupled manner using a predictor–corrector approach. Specifically, a colocated variable arrangement and a Rhie-and-Chow-type pressure–velocity coupling combined with a SIMPLE-type algorithm are used.26,27 A
Geometry and grid convergence study
The test case is a three-bladed rotor, designed to reduce acoustic emissions. The design is yielded from a low-cost numerical tool developed at ISAE-Supaero based on blade element and momentum theory (BEMT) 28 for the aerodynamic prediction and formulation of the Ffowcs-Williams and Hawkings equation as expressed by Farassat 29 coupled with broadband noise models for the acoustic prediction. The distributions of lift and drag are estimated from the local lift and drag coefficients on 2D sections. The estimation of sectional aerodynamic performance relies on a low-fidelity approach, which considers Euler equations along a streamline coupled with an integral boundary layer formulation. 30 Such an approach demonstrated a good accuracy for low Reynolds number flows. More information about the design tool are available in Serre et al. 31 The main characteristics of the rotor obtained with this design technique are indicated in Table 3. The airfoil section is a Gottingen 265, which is well adapted to low Reynolds number flows (thin and cambered profile).
Main parameters related to the three-bladed rotor.

Three grids are designed, which all match wall-model LES requirements: the dimension of the first cell in the direction normal to the wall is, respectively, set to 480 μm, 355μm and 240 μm (which corresponds to
Main grid parameters for URANS and LES
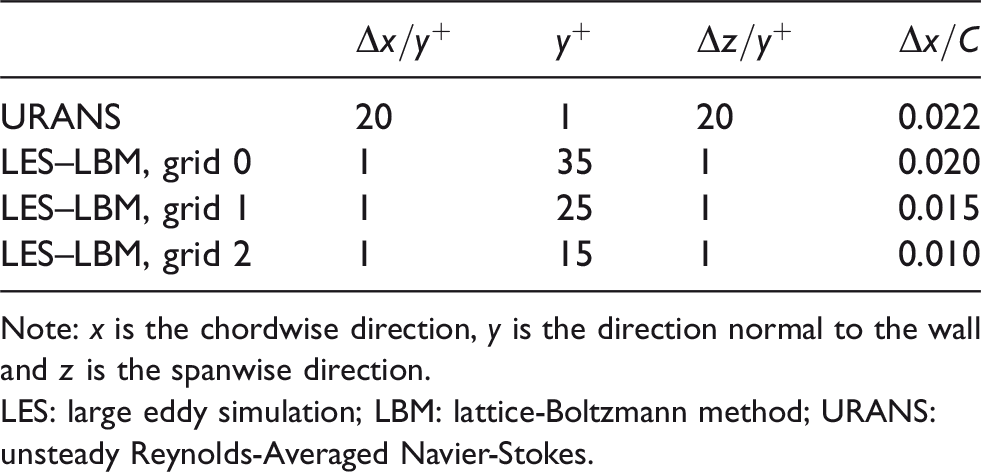
Note: x is the chordwise direction, y is the direction normal to the wall and z is the spanwise direction.
LES: large eddy simulation; LBM: lattice-Boltzmann method; URANS: unsteady Reynolds-Averaged Navier-Stokes.
The influence of mesh resolution is observed on the torque coefficient, defined as


Comparison of global performance: (a) thrust coefficient CT and (b) torque coefficient CQ.
Comparison with measurements
Three sets of data are compared with measurements: LES–LBM, URANS and BEMT (as used for the design step). Only the global aerodynamic forces are measured with a five-component balance. Indeed, the comparison between experimental and numerical predictions is done only for the torque and thrust coefficients, CQ and CT, defined as


Comparison of global performance: (a) thrust coefficient CT and (b) torque coefficient CQ.
When considering the torque coefficient, the order of the methods regarding their accuracy is inverted: LES–LBM, URANS and BEMT over-predict torque by 50%, 40% and 21%, respectively. At 4950 r/min, similar conclusions can be drawn: the thrust coefficient is under-predicted by 2.5% with LES–LBM and over-predicted by 14% and 17% by URANS and BEMT, respectively. For the torque, LES–LBM, URANS and BEMT over-predict by 29%, 23% and 12%, respectively. It is unclear why three very different numerical methods over-predict the torque (especially the BEMT which neglect 3D effects and predicts fully attached boundary layers). Unfortunately, due to the lack of experimental data, it is not possible at the moment to identify the origin of such discrepancies.
The local thrust coefficient is plotted in Figure 10 for the three methods. As already shown, BEMT predicts the higher thrust coefficient and LES–LBM the lowest one. From the root to

Comparison of local thrust coefficient, along the rotor span.
Analysis of the blade vortex interaction
One of the dominant sources of noise in the present rotor comes from the ingestion of turbulence by the leading edge of the rotor blades.31,32 Figure 11 shows an instantaneous iso-surface of Q criterion, coloured by the pressure coefficient 

Instantaneous iso-surface of Q-criterion coloured by the pressure coefficient – Cp (LES–LBM data).
Three different vortices are generated close to the rotor tip: one starts at the leading edge, one comes from the pressure side and one begins at mid-chord. The breakdown of these three vortices starts close to the trailing edge, due to the recompression. These vortices merge also with the vortex due to the separation of the suction side boundary layer, close to the tip. The mixing process between the different vortices produces turbulence that impacts the following blade (located on the left part of the picture in Figure 11).
The numerical data obtained with URANS and LES–LBM are analysed for the reference configuration, for the rotation speed

Time-averaged flow field coloured with the normalised streamwise component of the velocity
To point out the influence of vortical flows in this configuration, a flow field is extracted at 50% of the chord downstream the trailing edge and coloured with the normalised vorticity magnitude, as shown in Figure 13. The wake generated downstream the blade is then convected by the flow in the streamwise direction, with a higher speed in the vicinity of

Time-averaged flow field coloured with the vorticity magnitude
As reported in Lucca-Negro and O’Doherty,
33
an empirical criterion to evaluate the risk of vortex breakdown is to evaluate the Reynolds number based on the vortex characteristics Rec and the Rossby number Ro, defined as

Regarding the prediction of acoustic emissions, the question of potential tip vortex breakdown is of major importance: as shown in Figure 13, in the case of vortex breakdown, the turbulence generated by the tip vortex can impact the following blade on a large part of the span, which is not the case if the vortex remains coherent.
The turbulent kinetic energy, normalised with the rotation speed
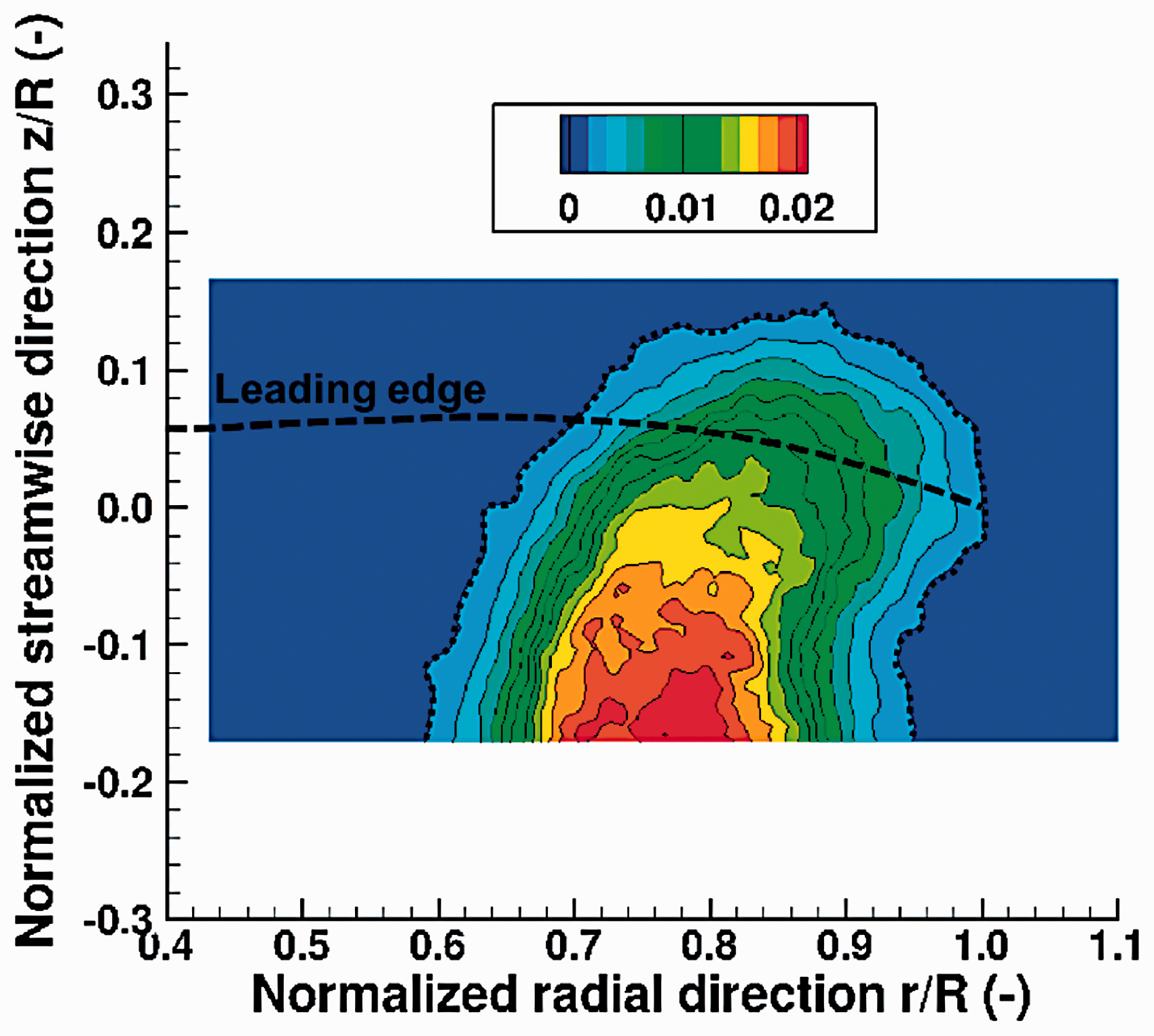
Time-averaged flow field coloured with the normalised turbulent kinetic energy
The typical turbulent scales seen by the rotor leading edge are estimated by computing the Taylor microscale λg. Such turbulent scales are deduced from the two-point correlations in the spanwise direction using the azimutal component of the velocity

Normalised Taylor microscale
Effect of different designs on acoustic performance
Four designs are investigated with the objective to reduce the blade vortex interaction and thus to increase the acoustic performance. The original geometry is referred as the reference. The second geometry (referred as wavy) is the reference geometry which includes tubercles at the leading edge: the wavelength of the sinusoidal variation is
For the three designs, a breakdown of the tip vortex starts close to the trailing edge. A time-averaged flow field, obtained in the reference frame of the rotor, and coloured with the normalised fluctuations of pressure
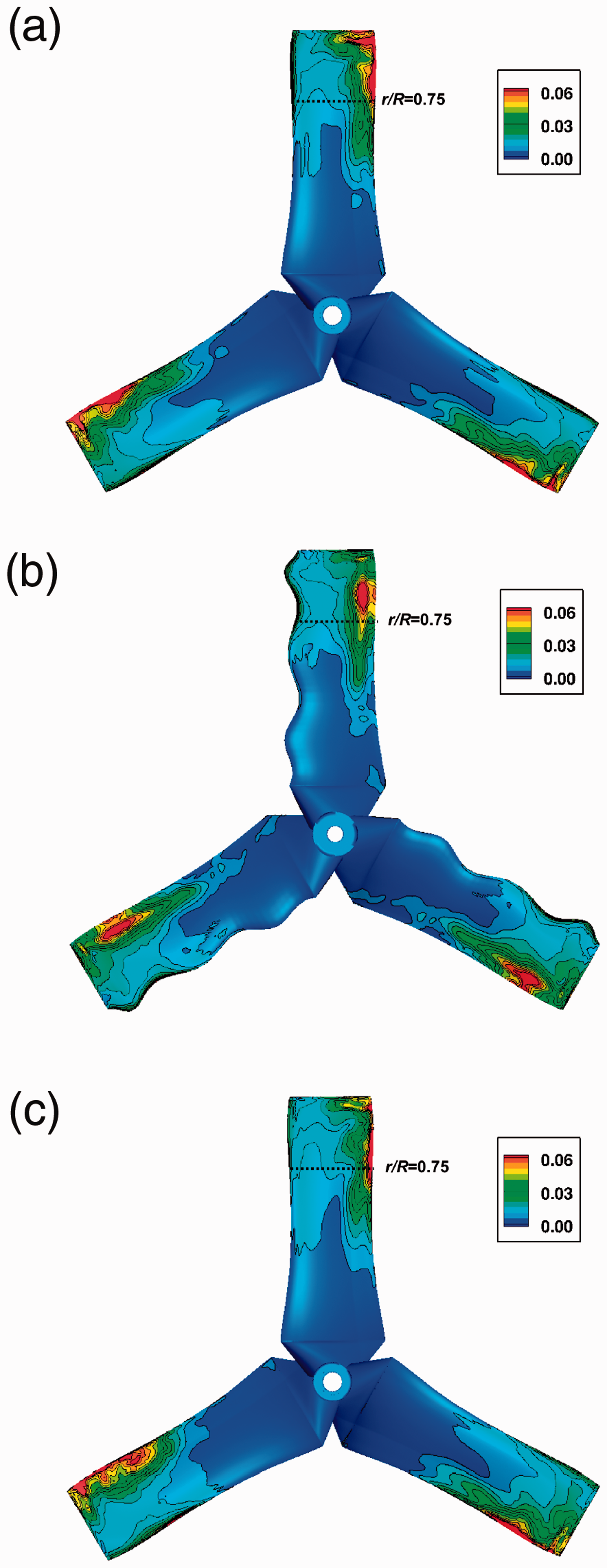
Time-averaged solution on the suction side coloured by the normalised pressure fluctuations
The global noise of each configuration can be evaluated at a distance of 10 rotor radii, by integrating the pressure signal on all frequencies, which gives a total noise of (1) 64.9 dB (reference geometry), (2) 64.1 dB (wavy leading edge) and (3) 68.4 dB (shifted blade). The aerodynamic performance is plotted in Figure 17 with respect to the acoustic performance. A validation of these results can be found in Serre et al.31,41 This analysis of LES–LBM results demonstrates that the adaptation of the leading edge is a potential solution to increase both the aerodynamic and acoustic performance of MAV propeller.

Comparison of the Figure of Merit (aerodynamic performance) with respect to far-field noise (acoustic performance) for three different designs.
Conclusions
This works shows that LES–LBM has a very good potential to describe the flow related to MAV applications. Three different applications have been investigated, of increasing complexity: a single blade low-Reynolds rotor, a two-bladed rotor in interaction with the ground and a three-bladed rotor optimised for acoustic performance. In all cases, the torque and thrust can be correctly predicted with a good accuracy, but only if a particular care is brought to the near wall grid resolution. The work reported in this paper shows that a correct magnitude order for the grid resolution is to choose
Further investigations include some investigations to assess the potential of LES–LBM to describe near wall flows (use of wall-modelling) and fluid/structure interactions that could be efficiently represented by taken advantage of the immersed boundary approach.
Footnotes
Acknowledgements
Numerical simulations have been performed thanks to the computing center of the Federal University of Toulouse (CALMIP, project p1425) and resources provided by GENCI (project A0042A07178). These supports are greatly acknowledged. Special thanks to the technical team of DAEP at ISAE-Supaero for the acquisition of experimental data and to Orestis Malaspinas and Jonas Latt, from the University of Geneva, for their support on Palabos. The authors also thank CERFACS, for providing the post-processing tool and ONERA for the collaborative work on MAVs.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.