
Abstract
In order to accurately diagnose the fault of induction motor, a fault diagnosis of nonlinear observer method based on BP neural network and Cuckoo Search algorithm is proposed. It is a new method which mixes analytical model and artificial neural network; firstly, the induction motor model is divided into linear and nonlinear parts, and BP neural network is used to approximate the nonlinear part. Then an adaptive observer is established, in which a simple and effective method for selecting the feedback gain matrix is offered. Cuckoo Search algorithm is utilized to improve the convergence speed and approximation accuracy in BP Neural Network. Compared with some other algorithms, the simulation results show that the proposed method has higher prediction accuracy. The designed nonlinear observer can estimate the current and speed accurately. Finally, the experiment of winding fault is implemented, and the online fault detection of induction motor is realized by analyzing the current residual errors.
Introduction
Due to some excellent features, like simple structure, durability, low price, high efficiency and fast dynamic response, induction motors (IMs) are widely used in agricultural production, science and technology, transportation, industry and other fields.1–2 It is significant to monitor the state and detect abnormalities for IMs. The fault of IM will not only damage itself but also cause the collapse of production line, resulting in huge economic losses and catastrophic consequences. For example, it is very important for the motor fault diagnosis in the electric drive system shown in Figure 1. Some common faults in IM include stator turn-to-turn short circuit, broken rotor bars, air gap eccentricity and bearing fault. 3 Among them, stator winding short circuit and rotor bar breakage are the most common faults, accounting for 30%–40% and 10% of the total faults, respectively.

An electric drive system.
In recent years, with the development of computer technology and signal processing technology, more and more scholars began to actively study the fault detection of IMs.4–6 Bessam et al. 4 presented a method for fault diagnosis in inter-turn short circuit based on discrete wavelet transform and neural network. Glowacz5,6 proposed commutator motor fault diagnosis based on vibration and acoustics, respectively. Since the neural network can analyze and infer a large number of sample data, fault diagnosis methods based on the neural network has been widely applied in motor equipment.5–9 Shi et al. 7 introduced a fault diagnosis method based on optimal Wavelet Tree and improved BP neural network. The optimal Wavelet Tree is used to extract eigenvectors of motor fault state regarded as input samples of the neural network, and the output types of the motor fault are obtained. However, this method is not suitable for online fault diagnosis. Ince et al. 8 introduced the state monitor and early fault detection system for motor based on one-dimensional convolution neural network. By this method, the input current samples are classified without needing feature extraction algorithm. Wang et al. 9 presented a deep-learning-based model termed multiresolution and multisensor fusion network for motor fault diagnosis, through multiscale analysis of motor vibration and stator current signals.
The selection of fault feature quantities is the most difficult to diagnose IM faults by artificial intelligence. Observer-based fault diagnosis method is also one of the most hotspots of researches.10–13 Fault diagnosis method based on analytic model usually adopts observer technology, which compares the output current value of the observer with the actual output current value and produce residual signals. The key point is to design an effective observer to judge whether the system has faults or not. Li and Yang 10 proposed a simple fault diagnosis observer for single output nonlinear systems. In fact, only one adaptive high-gain observer is designed to estimate the fault parameters. In Angelo et al., 11 a stator fault diagnosis method for IM based on adaptive observer is introduced. This method established a mathematical model of the stator fault of IM and identified the fault current by the adaptive observer, then the stator faults are distinguished. However, the model depends on a large number of simplifications. In Zhang and Huang, 12 the stator and rotor faults of motor are diagnosed by the output residual of observer, but three matrices are still needed to be given, which increases computation. In Yu et al., 13 a sliding mode observer is described for fault diagnosis in nonlinear systems, which is applied to fault diagnosis and reconstruction of DC motor.
The key technology of sensorless vector control system is to estimate flux and speed. 14 Therefore, accurate observation of flux and speed is vital for the whole control system. The design methods of IM observer have been reviewed in many literatures. 15 – 18 In Comanescu, 15 a design and analysis of a sliding-mode observer for the flux magnitude of the IM is presented. In Alonge et al., 16 a nonlinear observer for IM dynamic model considering magnetization characteristics is proposed. The stability analysis based on Lyapunov is used to ensure the convergence of the observer. In Yin et al., 17 a method of observing speed and flux link of IM based on Multi-model extended Kalman filter is proposed. In Yin et al., 18 an adaptive observer is proposed, and the effect of gross error on the tracking accuracy of the adaptive observer is analyzed.
In this paper, a novel fault diagnosis method based on nonlinear observer is proposed. The full-order observer is designed based on the known state equation under the d-p coordinate system of IM. By comparing the output current of the motor with the estimated current of the observer, the residual is generated, and the fault detection and separation are realized through the residual analysis. BP Neural network can fit the properties of nonlinear function with arbitrary precision, 19 so as to approximate the non-linear part of motor model. Thus, the accurate estimation of the nonlinear part of the motor is realized, and the problem that the observer of the nonlinear system is difficult to design is solved. The pole placement method is usually used to design the feedback gain matrix, but this method makes the system unstable at low speed. 20 To solve this problem, a simple and effective method is used to select the error feedback gain matrix, which has better identification effect than the traditional pole placement method and LMI method. Cuckoo Search (CS) algorithm is a new arithmetic proposed by Professor Yang and Deb of Cambridge University in 2009. 21 In this paper, CS algorithm is used to optimize parameters in BP neural network, and compared with several algorithms, CS-BP has better convergence ability to some extent. Finally, the simulation experiment of winding fault is implemented, and the online fault detection of IM is realized by analyzing the residual errors.
The rest of this paper is organized as follows. In the chapter of Mathematical model of three-phase IM, we briefly described the mathematical model for state space of IM. Then a novel nonlinear observer of BP neural network and CS algorithm is proposed in Section III, and an effective method to select an error feedback gain matrix is offered. In this part, the stability of the proposed observer is also analyzed. In Section IV, simulation and result analysis of IM is set up and the performance of the proposed method is analyzed and discussed. Finally, section V concluded the whole paper.
Mathematical model of three-phase IM
A nonlinear model is represented by


State variables are shown as

Input variables are expressed as








CS-BP neural network observer
Considering the fault diagnosis of adaptive observer is sensitive to the uncertainty of the model, and there are some problems when to operate motor, such as random disturbance, unknown input, linearization error and inaccurate modeling, in this paper CS-BP neural network is used to fit the nonlinear part in motor model. The details are as follows.
BP neural network optimized by CS algorithm
As a widely used neural network at present, BP neural network
23
is a kind of multi-layer feed-forward network with the error back propagation. Its structure is divided into the input layer, the hidden layer and the output layer. In the process of forward propagation, the input signal is processed from the input layer to the output layer through the hidden layer. If the output layer cannot get the desired output, the error signals are inverted and the weights of neurons are adjusted by gradient descent method. Many studies report that BP neural network can approach any nonlinear function with any accuracy if the network structure and parameters are chosen reasonably. Gradient descent method is a method to reduce network output error by adjusting network weights. Hypothesis there are

Because E is a function of weights vij wjk, we can adjust the weights by gradient descent method, and then reduce the errors, that is


The weights and thresholds of BP neural network are generated randomly, so much time is required in training process. Usually, the weights and thresholds obtained by training are not the optimal value of the demand. In this paper, we use CS algorithm to find the optimal weights and thresholds.
In CS algorithm, the global optimal solution is found by simulating the parasitic reproductive behavior of cuckoos and combining with Levy’s flight search principle.
24
It is reported that the global optimal solution obtained by CS algorithm is superior to Particle Swarm optimization and Genetic algorithm to some extent. The main reasons are as follows: The combination of local search and efficient exploration of the whole space makes the algorithm more effective. In this algorithm, there are only two parameters, population size


Another part of the poor nest is abandoned with a certain probability

In the CS-BP algorithm, each egg represents the optimal initial weights and thresholds of the BP neural network. In each iteration, CS algorithm is used to optimize the initial weights and thresholds, and the optimal solution is assigned to the BP neural network. The samples are trained by BP neural network. The CS algorithm continue to carry out the initial weights and thresholds until the convergence condition is reached. Thus, the influence of model error is avoided and the anti-interference ability of the system can be improved by designing CS-BP neural network to approximate the non-linear part of the motor model. Figure 2 is the flow chart of CS-BP model.

Flow chart of CS-BP model. CS: Cuckoo search.
The proposed observer
When the inter-turn short circuit fault occurs in the stator winding, the total stator resistance will be reduced. Conversely, when the rotor winding has a turn-to-turn short circuit fault, the total rotor resistance will be increased.26 When the motor has faults, the change of the motor parameters causes the observer to generate a large number of identification error, and the residual errors become a non-zero value, that is used to judge whether the motor fails or not. In this paper, we use CS-BP neural network to approximate the non-linear function of the motor model

Structure diagram of BP neural network observer optimized by CS algorithm. CS: Cuckoo search.
Stability analysis of CS-BP neural network observer
Considering the nonlinear dynamic system as shown in Formula (1), make the following assumptions:
Defining the output deviation is
The observer deviation equation is

The purpose of the design is to make the observer deviation



According to Lyapunov stability principle,
The selection of feedback gain matrix for observer
The matrix L in equation (19) is the feedback gain in the proposed observer, which is used to correct the system by weighting the current error. There are two main methods for choosing feedback gain matrix: pole assignment method and LMI method. because the three-phase IM is a multi-variable and time-varying nonlinear system, the design of its state observer feedback gain matrix is complex, also the poles of the IM system varies with the change of speed. The state observer feedback matrix designed by the pole assignment method of linear time-invariant systems in modern control theory is no longer applicable. To solve this problem, a simple and practical method for selecting error feedback gain matrix according to the dynamic model equation of IM is proposed. The details are as follows. 27
Firstly, four error functions are defined, which are the estimated error values of each state variable, as shown in equation (24). Subtract equation


The differential value of error in equation (25) is derived from the error of stator current and rotor flux, the rotor flux of IM cannot be obtained by direct measurement. Therefore, in practice, the rotor flux error cannot be obtained, only the stator current error can be obtained. Assuming the estimation of rotor flux is accurate, and the simplified error equation can be obtained as shown equation (26).

From equation (26), the error feedback gain matrix is obtained

In order to speed up the convergence of the system, the error is multiplied by a positive proportional constant
After estimating stator current and rotor flux by observer, the speed adaptive rate can be derived from Lyapunov stability principle.
28
The speed adaptive rate can be expressed as follows

Where
Simulation and result analysis
In order to evaluate the control performance of the nonlinear observer in synchronous rotating coordinate system, a simulation model of IM is built. The nonlinear approximation of the CS-BP neural network is realized by S-function, and then the proposed method is simulated. The parameters of IM are shown in Table 1. The feedback gain matrix can be obtained by substituting motor parameters into equation (27). PI value of speed estimation is set as:

Rated parameters of induction motors.

Offline training results of CS-BP
Parameter setting: The size of cuckoos is defined as 25 and the number of iterations is defined 100. The neuron number in input layer, hidden layer and output layer of BPNN are set as 5, 20 and 5. The simulation model of IM is implemented in this section and 725 data series in the nonlinear part are selected as training samples of neural network. Then 200 data are regarded as testing data. In order to obtain better performance, the training target error is set to 1e-5, the learning rate is 0.05, and the maximum iterations is 1000 in training process. The root mean square error is utilized to evaluate the whole system performance, that is

In order to evaluate system performances, two extra methods, BP neural network (BP-NN), and extreme learning machine optimized by Firefly Algorithm (FA-ELM) are implemented and compared to our proposed method. The results are shown in Table 2. As we can see, our proposed method holds less RMSE than BP-NN and FA-ELM, so CS-BP neural network has better training effects. Figure 4 is test error results of three prediction models between CS-BP-NN, BP-NN and FA-ELM. It can be seen that the prediction accuracy of CS-BP-NN model is higher, and the non-linear fitting ability is relatively stronger from the prediction error curve. The results show that the performance of the BP neural network is obviously improved by CS algorithm.
Comparison of training effects of various algorithms.

CS: Cuckoo search; FA-ELM: Firefly Algorithm.

The error curves of CS-BP-NN, BP-NN, and FA-ELM. CS: Cuckoo search; FA-ELM: Firefly Algorithm.
Analysis of simulation results
The residual generation and fault detection method based on the proposed observer is shown as follows:
Selecting the output error Under non-trouble condition, that is
The corresponding dynamic equation of the state error is shown in equation (20). From the stability analysis of the observer of cs-bp neural network introduced in the previous chapter, it is known that
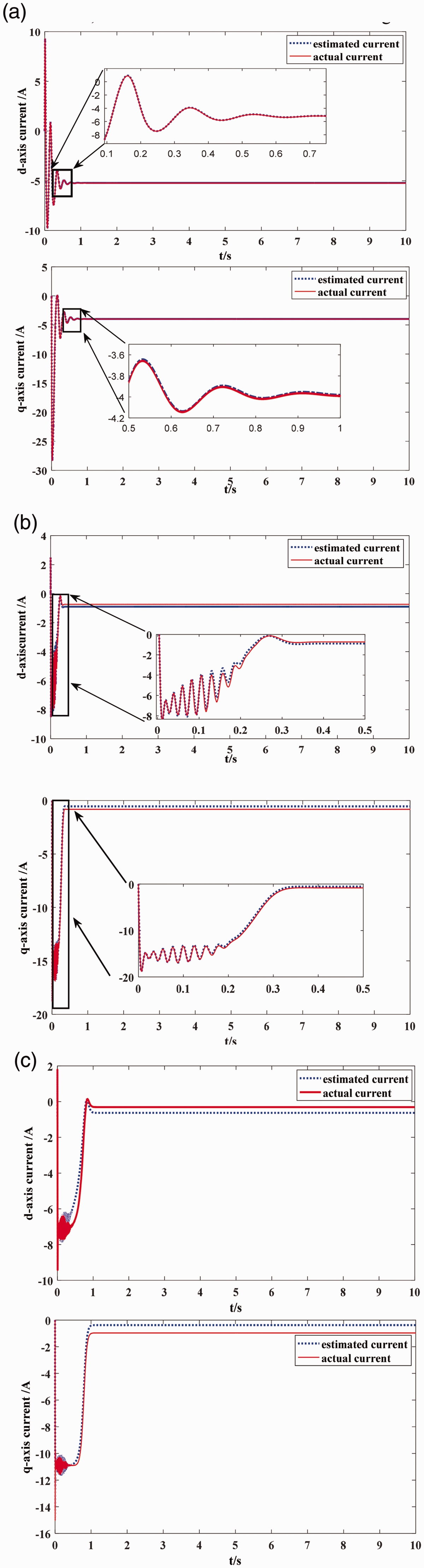
Estimated and actual current curves in synchronized rotating coordinates.(a)
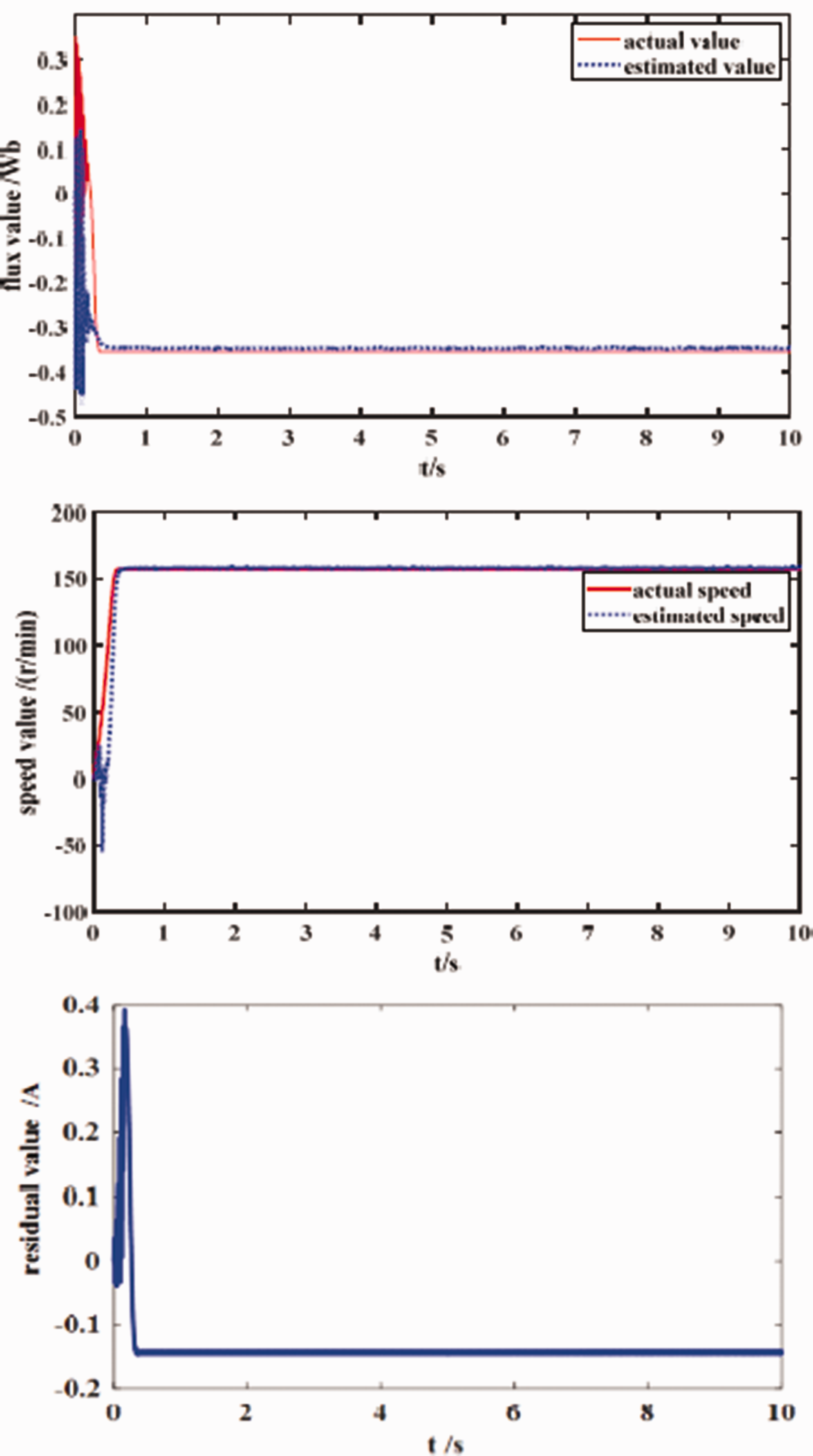
The curves of flux link, speed and current error with

The compared curve of estimated torque and actual torque.

Estimation curves of the speed adaptive identification system.(a)
2. When the motor breaks down, that is
Assuming that the inter-turn winding short-circuit fault occurs in the rotor winding after 5 s, the value of 
The corresponding experimental results are shown in Figure 9.

Residual value curves of speed and current in stator faults. (a) The residual error of speed. (b) The residual error of the current.
Figure 5 shows the comparison curve between the estimated current of the observer and the actual measured current of the motor in the absence of motor faults. Figure 5(a) to (c) are the simulation results when the synchronous frequency is
Figure 6 shows the simulation results of flux linkage, speed and current errors with the synchronous frequency is
Figure 9 is the identification results of the CS-BP nonlinear observer under stator winding inter-turn short circuit fault of IMs. As we can see, the stator current error and speed error suddenly changed when the stator winding inter-turn short circuit occurs at 5 s, and then tend to be stable. It is because of the decreasing of actual stator resistance, and the stator resistance parameters in the observer are not compensated leading to the identification errors of stator current and speed increase significantly. Then, the state estimation is continuously revised by feedback correction, and the observation errors are gradually reduced.
In summary, in the case of input unknown load disturbance, when the stator winding and rotor winding have no faults, the residual errors of d-axis and q-axis stator current is almost zero, which shows the observer has good robustness. If the motor fails, the observer model no longer matches the motor model, and the deviation
Conclusion
In this paper, a full-order flux observer is presented in a synchronous rotating reference frame, and the simulation of winding faults are experimented. The residual errors are generated by the observer, the fault detection and separation of IM are realized by analyzing the residual errors.
This method makes full use of advantages of good approximation effect and strong generalization ability of BP neural network to train the nonlinear part of IM offline. It overcomes the limitation of Lipschitz condition assumption for nonlinear dynamic systems in previous studies.
A novel method of speed estimation and flux linkage observation is proposed in this paper. In the future, the proposed method will be used to realize the speed sensorless vector control and the direct torque control, and realize online fault diagnosis of speed sensorless IMs. Next, the method can be further applied to fault tolerant control of current sensor faults in IMs.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (61572416), Hunan province Natural science Zhuzhou United foundation and Product-Study-Research project (16QDZ07). China Postdoctoral Science Foundation funded project No.2017M622574.